- Ninguna Categoria
Simulación Computacional de Motores Pluricilindricos de
Anuncio
Simulación Computacional de Motores
Pluricilindricos de Combustión Interna
por Juan Pablo Alianak y Juan Tofoni
Cátedra Ingeniería del Automóvil
Escuela de Ingeniería Mecánica
Universidad Nacional de Rosario
1
CAPITULO I
INTRODUCCION
2
1.1.- Objetivo
SIMULAR EL FUNCIONAMIENTO FLUIDODINAMICO DE UN MOTOR
PLURICIILNDRICO DE COMBUSTION INTERNA ENCENDIDO POR CHISPA
Como objetivos secundarios se desprenden los siguientes:
-
-
Estudio y comprensión de los fenómenos que ocurren dentro de un motor de
combustión interna, 4 tiempos, de encendido por chispa, poniendo énfasis en los
sistemas de admisión y escape.
Ampliación al caso pluricilíndrico del código existente y reescritura en Fortran
para obtener mayor velocidad de cálculo.
Utilización del software para el desarrollo de elementos para motores de
competición.
1.2.- Condiciones de borde
1.2.1.- Material existente
Se partió de un proyecto final anterior, realizado en la Universidad Nacional de
Rosario por Leonardo Ambroggi y Marcelo Pompei, hecho sobre un motor
monocilindrico.
1.2.2.- Recursos computacionales
El software esta planteado para que pueda ser utilizado sobre una computadora
personal actual, tipo Pentium III, con una memoria RAM de 64Mhz.
1.2.3.- Tiempo de simulación
El tiempo de simulación deberá estar acotado a algunas horas, de lo contrario seria
imposible utilizarlo para optimizar elementos por el tiempo que demandaría.
1.2.4.- Apoyo técnico-teórico
A cargo del director de este proyecto, miembro del CIMEC (Centro Internacional
de Métodos Computacionales en Ingeniería ).
1.2.5.- Tiempo de ejecución del proyecto
Inicialmente el tiempo planteado fue de un año, pero debido a la ampliación del
proyecto, este se extendió 6 meses más.
3
1.3.- Propósitos
Para la realización de este proyecto se tuvieron en cuenta los siguientes aspectos:
a-
Incluir el modelo de unión al código existente para tener la posibilidad de
simular motores pluricilíndricos.
b-
Validación del código frente a casos reales, principalmente sobre motores de
competición, con el objetivo de proponer cambios en determinados
elementos en busca de mayor potencia.
1.4.- Propuestas
a-
Teniendo en cuenta que el software es unidimensional, se incluyo un modelo
de unión acorde, sin tener en cuenta la tridimensionalidad del problema, en el
que se asume que todos los extremos de los tubos que confluyen en la unión
tienen la misma presión, además de otras condiciones.
b-
Para la validación se tuvieron a disposición todos los datos de los motores
utilizados; los geométricos que son los datos de entrada al software, y los
resultados extraídos del banco de pruebas para contrastar con los resultados
arrojados por el código.
1.5.- Evaluación económica
Si bien este proyecto tiene una inclinación marcada hacia la investigación, en el
análisis económico podríamos tener en cuenta algunos aspectos importantes.
La importancia económica de una herramienta como esta a la hora de diseñar un
motor de combustión interna, debido a que de no poseerlo habría que construir cada uno
de los elementos que se quieran ensayar afrontando sus elevados costos, es
determinante. Por ejemplo, si tenemos en cuenta en los ejemplos presentados, que se
ensayaron alrededor de 100 múltiples de escape, a costo muy bajo (el costo de mantener
una PC encendida), nos damos cuenta claramente las ventajas económicas de este
proyecto. Si a esto le sumamos la velocidad con que se ensayan cada uno de los
cambios propuestos, y teniendo en cuenta que el tiempo (más aun en el ambiente del
automovilismo de competición) tiene un costo elevado, le confieren más ventajas
económicas a las ya mencionadas.
4
CAPITULO II
TEORIA SOBRE MOTORES 4 TIEMPOS DE ENCENDIDO
POR CHISPA
5
Resumen
En este capitulo se abordarán los aspectos teóricos de un motor 4 tiempos de
encendido por chispa (ciclo Otto). Al comienzo se hará una introducción a los motores 4
tiempos ciclo Otto desde un punto de vista descriptivo, para continuar con los aspectos
teóricos de su funcionamiento y su diferencia con un ciclo de un motor real.
Posteriormente se darán algunos parámetros a tener en cuenta a la hora del diseño, junto
con algunas explicaciones teóricas de los fenómenos que ocurren dentro del motor. Al
final del capitulo, se incluirá un punto donde se hablara sobre combustión y su
importancia a la hora de evaluar la performance de un motor.
6
2.1.- Introducción al motor de 4 tiempos
El motor 4 tiempos es mostrado en la figura 2.1, con las distintas fases de llenado y
vaciado de los cilindros. La figura muestra el motor con una bujía de encendido, con
acceso al cilindro controlado por válvulas tipo hongo comandada por levas, botadores y
resortes de válvulas. Las definiciones de cada elemento son mostradas en la figura 2.2.
El cilindro contiene un pistón con 3 ranuras efectuadas para alojar 2 aros de
compresión y un tercer aro debajo que elimina el exceso de aceite de la pared del
cilindro. El movimiento del pistón es controlado por un cigüeñal con una biela que une
a este con el pistón, a través de un perno.
Figura 2.1: carreras de un ciclo en un motor 4 tiempos
Figura 2.2: detalles del motor
7
En la figura 2.3, se muestra una foto en corte de un motor real en donde se aprecian
todos los elementos antes mencionados. El sistema de admisión se encuentra a la
derecha de la figura, y el escape a la izquierda.
Figura 2.3: corte de un motor real
Es claro de la figura 2.1, que el máximo movimiento del pistón dentro del cilindro,
es decir, la carrera del pistón, es, simplemente, hacia arriba o hacia abajo, desplazándose
el largo de volteo del cigüeñal. El máximo movimiento del pistón crea un volumen
desplazado Vsv , y es claro en la figura que el pistón se detiene cerca de la tapa de
cilindros creando un volumen mínimo en el cual la combustión del aire atrapado y el
combustible tiene lugar. Este volumen mínimo es definido como volumen nocivo Vcv.
Cuando el pistón alcanza la parte mas alta, o sea llega al mínimo volumen, se dice que
el pistón está en su punto muerto superior PMS y cua ndo alcanza la zona mas baja o de
máximo volumen se encuentra en su punto muerto inferior PMI.
Etapas del ciclo Otto
1- Admisión: el aire es inducido al cilindro, a través de la válvula, por la carrera de
admisión desde el PMS al PMI, incrementando el volumen desde el mínimo al máximo.
Esto se aprecia en la figura 1A. La válvula de admisión es comandada por el
movimiento de rotación del árbol de levas. Así cuando el pistón se mueve desde el PMS
8
al PMI en la carrera de admisión, el cilindro se llena, idealmente con una cantidad de
masa de aire equivalente al volumen desplazado a la presión y temperatura atmosférica.
2- Compresión: el aire ahora atrapado dentro del cilindro experimenta una
compresión cuando el pistón se mueve desde el PMI al PMS. El volumen decrece desde
el máximo al mínimo, es decir desde Vbdc a Vtdc . La presión y la temperatura del aire se
elevan y el combustible atrapado con el aire se vaporiza. Esto se ilustra en la figura 1B.
En el final de la carrera de compresión, tiene lugar la combustión, iniciada por una
chispa proveniente de una bujía localizada generalmente entre las válvulas en la tapa de
cilindros. La presión entonces se eleva rápidamente a decenas de atm. y la temperatura
se eleva cientos de grados Celsius. Idealmente esto tiene lugar en el PMS y
instantáneamente.
3- Expansión: el pistón ahora desciende en la carrera de potencia, movido por una
alta diferencia de presión entre la cara superior del pistón en contacto con la cámara de
combustión y la inferior en contacto con la zona baja del motor a la presión atmosférica.
El volumen del cilindro va desde al Vtdc a Vbdc. Esta fuerza genera un torque en el
cigüeñal fig1C.
4- Escape: como el cilindro ahora contiene los productos de la combustión, es decir,
gas de escape, que debe ser removido para el próximo ciclo, una carrera de escape debe
iniciarse como muestra la fig 1D. La válvula de escape es comandada al igual que la de
admisión por un árbol de levas. La válvula de escape idealmente abre en el PMI, llega a
su máxima alzada alrededor de la mitad de la carrera y cierra en el PMS. El gas de
escape es forzado a salir cuando el pistón sube a través del área anular descubierta por la
válvula quedando el cilindro ‘limpio’ para comenzar el nuevo ciclo.
2.2 – Ciclo Otto
Un grafico que muestra de manera clara el funcionamiento termodinámico del
motor es un diagrama presión-volumen. Este grafico es comúnmente llamado ciclo
indicado del motor. En la figura 2.4 vemos un ciclo indicado ideal de un motor de
encendido por chispa, en donde se aprecian las distintas etapas tomando al ciclo como
cerrado (sin tener en cuenta las carreras de admisión y escape). En el análisis del ciclo
se llevan a cabo algunas simplificaciones que en al motor real no suceden. Algunas de
ellas son:
-
el aire es considerado como un gas ideal
el aporte de calor es entregado desde el exterior a través de las paredes del
cilindro
la energía de los gases de escape es cedida al medio a través de las paredes del
cilindro
9
Figura 2.4: ciclo OTTO ideal
En el ciclo indicado ideal se distinguen claramente 4 etapas:
•
•
•
•
1-2 compresión adiabática y reversible (isentrópica).
2-3 combustión a volumen constante (isocórica)
3-4 expansión adiabática y reversible (isentrópica)
4-1 escape a volumen constante (isocórica)
En la figura 2.5 se muestra un ciclo indicado de un motor en funcionamiento,
sensando la presión a cada instante dentro del cilindro y la posición del cigüeñal para
obtener el volumen desplazado. Esta claro en los gráficos, que ambos ciclos son muy
diferentes, debido en parte a los siguientes puntos.
•
•
•
1-2: la compresión realmente se produce con transferencia de calor del gas al
cilindro
2-3: debido a que la combustión es un fenómeno físico, que no ocurre de
manera instantánea como muestra el ciclo indicado ideal, sino que tiene un
tiempo de desarrollo, esta no se produce a volumen constante. Lo que
normalmente se hace es anticipar el inicio de la combustión antes de que el
volumen de la cámara se mínimo, o sea antes de que el pistón llegue del
PMS, de manera de compensar el tiempo de retraso desde que salta la chispa
hasta que la combustión se desarrolla completamente.
3-4: en la carrera de expansión el gas cede parte del calor al cilindro y este al
medio refrigerante, con lo cual la expansión no es adiabática.
10
60
50
[atm]
40
30
20
10
0
0
1
2
3
Volumen [m3]
4
5
6
-4
x 10
Figura 2.5: diagrama P-V de un motor en funcionamiento
Además de lo explicado arriba, en un motor realmente el ciclo indicado no es
cerrado como en el ideal, sino que hay momentos en donde las válvulas se abren para
permitir el ingreso o egreso de gas desde la atmósfera al cilindro o viceversa, con lo
cual el sistema pasa a ser un sistema abierto. Este intercambio de gas se produce en las
carreras de admisión y escape que se ven en detalle en la figura 2.6. Esta figura es un
zoom de la figura 2.5 en la zona llamada de bombeo. El análisis de esta porción del
ciclo indicado es determinante a la hora de analizar el funcionamiento del motor, sobre
todo para analizar su rendimiento volumétrico. Esta grafica nos puede decir entre otras
cosas si el tamaño de las válvulas es el indicado, si la tapa de cilindros admite o evacua
bien los gases (buenos CD), si existe backflow (flujo revertido) en alguna de las
carreras, etc.
2
1.8
1.6
[atm]
1.4
1.2
1
0.8
0.6
0.4
0.2
0
1
2
3
Volumen [m3]
4
5
6
x 10
-4
Figura 2.6: zona de bombeo de un diagrama P-V
11
2.3.- Parámetros de diseño
2.3.1.- Parámetros operativos
Dentro de los factores más importantes considerados a la hora de diseñar un motor
se encuentran:
•
•
•
•
•
Performance en el rango de operación
Consumo de combustible en el rango de operación y el costo de dicho
combustible
Contaminación sonora y emisiones en su rango de operación
Costo inicial del motor y su instalación
Durabilidad del motor, mantenimiento requerido
2.3.2.- Propiedades geométricas de los motores alternativos
Relación de compresión:
rc =
max imo volumen del cilindro Vd + Vc
=
min imo volumen del cilindro
Vc
donde Vd es el volumen desplazado y Vc el volumen residual.
Valores típicos son: rc=8 a 12 para motores SI (encendido por chispa) y rc=12 a 24
para motores CI (encendidos por compresión).
Relación entre el diámetro del cilindro y la carrera:
R bs =
B
S
(2.1)
Valores típicos son Rbs=0.8 a 1.2 para motores pequeños y medianos, decreciendo
a 0.5 para motores CI de bajas revoluciones.
Relación entre el largo de la biela y el radio del cigüeñal:
R=
l
a
(2.2)
Valores típicos son R=3 a 4 para motores pequeños y medianos incrementándose a
R=5 a 9 para grandes motores CI de bajas revoluciones.
La carrera y el radio del cigüeñal son relacionados por:
L = 2a
(2.3)
12
El volumen del cilindro en alguna posición ? del cigüeñal es
V = Vc +
πB 2
(l + a − s )
4
(2.4)
donde s e la distancia entre la eje del cigüeñal y el eje del perno de pistón y esta
dado por
s = a cos θ + (l 2 − a 2 sin 2 θ)1 / 2
(2.5)
Figura 2.7: geometría de cilindro, pistón, biela y cigüeñal
Una característica importante es la velocidad media del pistón Sp
S p = 2LN
(2.6)
donde N es la velocidad de rotación del cigüeñal. La velocidad media del pistón es
comúnmente un parámetro mas apropiado que la velocidad de rotación del cigüeñal para
relacionar la conducta de un motor. Por ejemplo, la velocidad del gas en la admisión y
en el cilindro son escalables con Vp.
La velocidad del pistón es cero en el comienzo de la carrera del pistón, llega a un
máximo cerca del la mitad de la carrera, y decrece a cero en el final de la misma.
La resistencia del flujo de gas o las tensiones de los elementos en movimiento
limitan el máximo de la velocidad media del pistón dentro de un rango entre 8 a 15m/s.
En automóviles de competición, donde todos los elementos están diseñados para altas
revoluciones, es posible alcanzar velocidades medias de hasta 25m/s.
13
2.3.3.- Torque y Potencia
El torque de un motor es medido generalmente en un dinamómetro. El torque viene
definido por
T = Fb
(2.7)
donde F es la fuerza aplicada a la celda de carga y b el brazo de palanca.
La potencia entregada por el motor y absorbida por el dinamómetro es el producto
del torque y la velocidad angular
P = 2πNT
(2.8.a)
donde N es la velocidad de rotación del cigüeñal. En unidades SI
P (Kw) = 2πN(rev / s) T( Nm) x10 −3
(2.8.b)
o en unidades US
P (Hp ) =
N (rev / min) T (lbf ⋅ ft )
5252
(2.8.c)
2.3.4.- Trabajo indicado por ciclo
Los datos de presión del gas dentro del cilindro pueden ser utilizados para calcular
el trabajo transferido del gas al pistón. La presión en el cilindro y el correspondiente
volumen desplazado pueden ser ploteados en un diagrama P-V como muestra la figura
2.8.
Figura 2.8: ejemplos de diagramas P-V
El trabajo indicado por ciclo es obtenido integrando la curva para obtener el área
encerrada sobre el diagrama:
Wc, i = ∫ pdV
(2.9)
Si tenemos en cuenta los procesos de admisión y escape surgen otras definiciones
del trabajo, que son:
14
Trabajo indicado grueso por ciclo Wc,ig : es el trabajo entregado al pistón en la
carrera de compresión y expansión.
Trabajo indicado neto por ciclo Wc,in : es el trabajo entregado al pistón en las 4
carreras (admisión-compresión-expansión-escape).
En la figura 2.8a y 2.8c Wc,ig es (área A + área C) y Wc,in es (área A + área C)(área B + área C), que es igual a (área A - área B) donde cada una de estas áreas son
consideradas positivas. El área B + área C es el trabajo transferido entre el pistón y los
gases del cilindro durante los procesos de admisión y escape y es llamado trabajo de
bombeo.
La potencia por cilindro es relacionada al trabajo indicado por ciclo como
Pi =
Wc, i N
(2.10)
nr
donde nr es el número de revoluciones del cigüeñal por cada carrera de potencia.
Para un motor de 4 tiempos nr=2; para un motor 2 tiempos nr=1. Esta potencia es la
potencia indicada.
2.3.5.- Eficiencia Mecánica
Parte del trabajo indicado gr ueso por ciclo es usado para expulsar los gases de
escape y admitir carga fresca. Una porción adicional de trabajo es utilizado para vencer
la fricción de los elementos móviles como aros, pistones, válvulas, etc. Todos estos
gastos de potencia son agrupados y llamados potencia por fricción. Así:
Pig = Pb + Pf
(2.11)
La relación entre las perdidas por bombeo y las perdidas totales es llamada
eficiencia mecánica:
ηm =
Pb
P
=1− f
Pig
Pig
(2.12)
2.3.6.- Presión media efectiva
Mientras que el torque es una medida de la capacidad de realizar trabajo que tiene
un motor, depende directamente del tamaño de este. Una medición más representativa
de la performance de un motor es obtenida dividiendo el trabajo por ciclo por el
volumen desplazado por ciclo. El valor así obtenido tiene unidades de fuerza/área y es
llamado presión media efectiva. De la ecuación (2.10)
Trabajo por ciclo =
Pn r
N
entonces,
15
Pn r
Vd N
(2.13.a)
P( Kw) n r x 10 3
Vd ( dm 3 ) N( rev / s)
(2.13.b)
mep =
En unidades SI y SU, respectivamente
mep ( KPa) =
mep (lb / in 2 ) =
P (Hp ) n r x 396000
Vd (in 3 ) N( rev / min)
(2.13.c)
La presión media efectiva también puede ser medida en términos de torque usando
la ec. (2.8):
mep ( KPa) =
mep ( lb / in 2 ) =
6.28n r T ( N ⋅ m)
Vd (dm 3 )
(2.14.a)
75.4 n r T(lbf ⋅ ft )
Vd (in 3 )
(2.14.b)
La máxima presión media efectiva de un buen motor esta bien establecida, y es
esencialmente constante sobre un amplio rango de tamaño de motores. Así, la bmep de
un motor desarrollado en particular puede ser comparada con aquella considerada como
buena y la efectividad con que el diseñador aprovecho el volumen desplazado. Valores
típicos para un motor naturalmente aspirado están en el orden de 8.5 a 12 Kg/cm2 en
las rpm de máximo torque. Una disminución de alrededor del 15% es producida en las
rpm de máxima potencia.
2.3.7.- Consumo especifico de combustible y eficiencia
En el ensayo de motores, el consumo de combustible es medido como un volumen
por unidad de tiempo. Un parámetro más usado es el consumo específico de
combustible (sfc), que es el caudal de combustible por unidad de potencia entregada.
•
m
sfc =
P
(2.21)
Con unidades,
•
m(g / s)
sfc (mg / J ) =
P( kW )
(2.22)
Bajos valores de sfc son obviamente buscados. Para motores de encendido por
chispa valores típicos buenos son del orden de 270g/Kwh.
16
Un parámetro adimensional que relaciona la potencia deseada de salida con la
necesaria de entrada (combustible) debería ser un valor fundamental. La relación de
trabajo producido por ciclo con la cantidad de energía del combustible suministrada por
ciclo que puede ser liberada en el proceso de combustión es comúnmente utilizada para
este propósito. Este valor es llamado eficiencia en la conversión de combustible y se
define como
ηf =
Wc
(Pn R / N)
P
= •
= •
m f Q HV ( m f n / N) Q
m f Q HV
R
HV
(2.23)
donde Q HV es el poder calorífico del combustible y m f es la masa de combustible.
Sustituyendo de la ecuación 2.21
1
sfc Q HV
(2.24a)
1
sfc ( mg / J ) Q HV ( MJ / Kg)
(2.24b)
ηf =
con unidades,
ηf =
2.3.8.- Relación aire/combustible
La relación aire/combustible viene definida por:
•
Aire / Combustibl e ( A / F) =
ma
•
(2.25)
mf
EL rango normal de operación para un motor SI usando naft a como combustible es
12 = A/F = 18
2.3.9.- Eficiencia volumétrica
El sistema de admisión –filtro de aire, carburador, mariposa, múltiple de admisión,
puerto de admisión, válvula de admisión- restringen la cantidad de aire que el motor
puede admitir en un ciclo. El parámetro usado para medir la efectividad de un sistema
de admisión es la eficiencia volumétrica. Es definida como la cantidad de aire inducida
frente a la cantidad teórica que se obtiene de multiplicar el volumen desplazado por la
densidad del aire,
ηv =
ma
ρ a ,i Vd
(2.26)
La densidad del aire puede ser tomada de la atmosférica (en cuyo caso η v mide la
eficiencia de todo el sistema de admisión) o puede ser tomada del múltiple de admisión
(en cuyo caso η v mide la eficiencia del múltiple, puerto y válvula de admisión
solamente). Valores típicos para motores naturalmente aspirados son del 80 a 90%. En
17
motores de competición es normal que estos valores superan el 100% debido a factores
de dinámica de gases que mas adelante serán explicados.
2.3.10.- Factor de corrección para la potencia y eficiencia volumétrica
La presión, humedad y temperatura del aire ambiente inducido dentro del motor, en
un determinado régimen, afecta la masa de aire inducida y la potencia de salida.
Factores de corrección son usados para ajustar la potencia a mariposa completamente
abierta y la eficiencia volumétrica para proveer una más exacta comparación entre
motores.
La base del factor de corrección es la ecuación unidimensional estática de flujo
compresible a través de un orificio o restrictor de flujo de área efectiva AE
2/ γ
γ +1 / γ
p
A E p 0 2γ p
m=
−
p
RT 0 γ − 1 p 0
0
1/ 2
•
(2.27)
En la deducción de esta formula, ha sido asumido que el fluido es un gas ideal con
constante R de los gases y la relación de calores específicos ( c p / c v = γ ) es una
constante; p 0 y T0 son la presión total y la temperatura aguas arriba de la restricción y p
el la presión en la garganta de la restricción.
Si en un motor p / p 0 es asumida constante a mariposa completamente abierta,
•
entonces para un sistema de admisión y un motor dado , el flujo másico de aire seco m a
varia como
ηv ≅
p0
(2.28)
T0
Para mezclas conteniendo la cantidad apropiada de combustible para usar todo el
aire disponible (y así proveer la máxima potencia), la potencia indicada a mariposa
•
completamente abierta Pi debería ser proporcional a m a . Así si
Pi , s = C F Pi , m
(2.29)
donde los subíndices s y m indican valores de condiciones standard y medido,
respectivamente. El factor de corrección C F es dado por
CF =
donde
Ps , d
p m − p v, m
Tm
Ts
1/ 2
(2.30)
p s,d = presión absoluta del aire seco - standart
p m = presión absoluta de aire ambiente - medida
p v, m = presión parcial de vapor de agua - medida
Tm = temperatura ambiente K - medida
Ts = temperatura ambiente K - standart
El factor de corrección para la eficiencia volumétrica es el siguiente,
18
η v, s Ts
C =
η v, m Tm
'
F
1/ 2
(2.31)
2.4.- Proceso de intercambio de gases
2.4.1. – Procesos de admisión y escape en un motor 4 tiempos
En un motor de encendido por chispa, el sistema de admisión típicamente consiste
en un filtro de aire, un carburador y mariposa o inyector y mariposa o mariposa con
inyectores individuales en cada tubo de admisión, y el múltiple de admisión. Durante el
proceso de inducción, ocurren caídas de presión cuando la mezcla pasa por cada uno de
estos elementos. Hay una caída de presión adicional cuando la mezcla atraviesa el
puerto y la válvula. El sistema de escape típicamente consiste de un múltiple de escape,
tubos de escape, a menudo con un convertidor catalítico y un silenciador. La figura 2.7
ilustra el proceso de admisión y escape en un motor SI convencional. Estos flujos son
pulsantes. Sin embargo, algunos aspectos de estos flujos pueden ser analizados sobre la
base de cuasi-estáticos, y la presión indicada en el sistema de admisión en la fig. 2.9a
representa el valor promedio temporal para un motor pluricilindrico.
La caída de presión a lo largo del sistema de admisión depende de la velocidad del
motor, de la resistencia de los elementos del sistema, del área a través de la cual se
mueve la carga fresca, y la densidad del aire. La figura 2.9d muestra el perfil de alzada
de válvula de admisión y escape vs. ángulo de cigüeñal. La práctica usual es extender la
apertura de las válvulas detrás de las carreras de admisión y escape para mejorar la
carga y descarga de los cilindros y hacer el mejor uso de la inercia de los gases en los
sistemas admisión y escape. El proceso de escape generalmente comienza 40 a 60º antes
del PMI. Hasta el PMI, el gas es descargado debido a la diferencia de presión entre el
cilindro y el sistema de escape. Después del PMI, el cilindro es vaciado por el pistón
que se mueve hacia el PMS. Los términos blowdown y desplazamiento son usados para
referir estas dos fases del proceso de escape. Típicamente el RCE es de 15 a 30º después
del PMS y el AAA 10 a 20º antes del PMS. Ambas válvulas están abiertas durante un
periodo de cruce, y cuando pi/pe<1, existe un retroceso del flujo desde el escape al
cilindro y de este hacia el sistema de admisión. La ventaja del cruce de válvulas ocurre a
altas revoluciones cuando un gran cruce de válvulas mejora la eficiencia volumétrica.
La válvula de admisión permanece abierta 50 a 70º después del PMI así la carga fresca
puede continuar ingresando debido a su inercia.
19
Figura 2.9: procesos de admisión y escape para un motor SI
2.4.2.- Efectos cuasi-estáticos y dinámicos
Cuando el flujo se mueve dinámicamente a través de un sistema de tubos, cámaras,
puertos y válvulas, están presentes la fricción, y las fuerzas de presión e inercia. La
importancia relativa de estas fuerzas dependen de la velocidad del gas y del tamaño y
formas de estos pasajes y sus uniones. Efectos cuasi-estáticos y dinámicos son
usualmente significantes. Varios efectos separados que afectan la eficiencia volumétrica
pueden ser identificados.
Perdidas por fricción: durante la carrera de admisión, debido a la fricción en cada
parte del sistema de admisión, la presión en el cilindro p c es menor que la presión
atmosférica por una cantidad que depende de la velocidad al cuadrado. Esta caída de
presión total es la suma de las caídas de presión de cada componente del sistema de
admisión. Cada caída es un porcentaje pequeño, con el puerto y la válvula
contribuyendo en gran medida. Como resultado, la presión en el cilindro durante el
periodo en el proceso de admisión cuando el pistón se esta moviendo cerca de se
máxima velocidad puede ser del 10 al 20% mas baja que la presión atmosférica. Para
cada componente en los sistemas de admisión y escape, la ecuación de Bernulli da,
∆p j = ξ j ρv 2j
20
donde ξ j es el coeficiente de resistencia para cada componente que depende de su
geometría y v j es la velocidad local. Asumiendo que el flujo cuasi-estático, v j es
relaciona a la velocidad media del pistón por
v jA j = SpA p
donde A j y A p son el área de flujo mínima y el área del pistón respectivamente.
Así, la perdida de presión cuasi-estática total debida a fricción es
p atm − p c = ∑ ∆p j = ∑ ξ jρv 2j = ρS p ∑ ξ j (
2
Ap
Aj
)2
(2.32)
La ecuación 2.32 indica la importancia de las ares de paso de flujo para reducir las
perdidas por fricción, y la dependencia de estas perdidas con la velocidad.
Efecto RAM: la presión en el múltiple de admisión varía durante cada proceso de
admisión de los distintos cilindros debido a la variación de velocidades de los pistones,
aperturas de válvulas y variaciones de áreas; y los efectos dinámicos del flujo resultan
de estas variaciones geométricas. La masa de aire inducida dentro de cada cilindro, y así
la eficiencia volumétrica, es casi enteramente determinada por el nivel de presión en el
puerto de admisión durante el corto periodo antes de que la válvula de admisión cierre.
A altas velocidades, la inercia de los gases en el sistema de admisión cuando la válvula
de admisión esta cerrando incrementa la presión en el puerto y continua el proceso de
carga cuando el pistón lentamente baja hasta e PMI y comienza la carrera de
compresión. Este efecto se vuelve progresivamente más importante cuando las
revoluciones se incrementan. La válvula de admisión cierra alrededor de 40 a 60º
después del PMI, en parte para aprovechar las ventajas de este fenómeno.
Flujo revertido en la admisión: porque la válvula de admisión cierra después de que
comienza la carrera de compresión, un flujo revertido de carga fresca desde el cilindro
hacia la admisión puede ocurrir cuando la presión en el cilindro se eleva debido al
movimiento del pistón hacia el PMS. Este flujo revertido es grande a bajas rpm. Es una
consecuencia inevitable del tiempo en que cierra la válvula de admisión para aprovechar
el efecto RAM a altas revoluciones.
Sintonía: el flujo pulsante de cada cilindro en el proceso de escape genera ondas de
presión en el sistema de escape. Estas ondas de presión se propagan a la velocidad local
del sonido relativa al movimiento del gas de escape. Las ondas de presión interactúan
con las uniones y extremos en el múltiple y tubos. Estas interacciones causan ondas de
presión reflejadas hacia el cilindro. En motores multicilindricos, las ondas de presión
generadas por cada cilindro, transmitidas a través del escape y reflejadas en el extremo,
pueden interactuar unas con otras. Estas presiones pueden ayudar o inhibir el
intercambio de gases. Cuando ayudan reduciendo la presión en el puerto de escape hacia
el final del proceso de escape, se dice que el escape esta sintonizado.
El movimiento del flujo en la admisión producida por los cilindros causa ondas de
expansión que se propagaran dentro del múltiple de admisión. Estas ondas de expansión
pueden ser reflejadas en el extremo abierto del múltiple (en el pleno) causando ondas
positivas de presión que se propagaran hacia los cilindros. Si el tiempo de estas ondas es
apropiado, las ondas positivas causaran que la presión en el final del proceso de
21
admisión se eleve por encima de la presión nominal. Esto incrementara la masa de aire
inducida. Tal sis tema de admisión se dice que esta sintonizado.
2.4.3.- Variación de la eficiencia volumétrica con la velocidad, área de válvula,
alzada y reglaje.
Los efectos del flujo sobre la eficiencia volumétrica dependen de la velocidad de la
carga fresca en el múltiple de admisión, puertos y válvulas. La velocidad local para
flujos cuasi-estáticos son igual al volumen del flujo dividido por la sección local. Ya
que el sistema de admisión y las dimensiones de la válvula están escaladas
aproximadamente con el diámetro del cilindro, la velocidad de la mezcla en el sistema
de admisión será escalable con la velocidad del pistón. Así, la eficiencia volumétrica
como una función de la velocidad para diferentes motores, debería ser comparada en la
misma velocidad del pistón. La forma de esta eficiencia volumétrica vs. la velocidad
media del pistón puede ser explicada con la ayuda de la fig. 2.8. Esta muestra, en forma
esquemática, como cada fenómeno descrito afecta a la eficiencia volumétrica. Los
efectos que no dependen de la velocidad (tal como la presión de vapor de combustible)
caen la curva de eficiencia debajo del 100% (curva A). El calentamiento de la carga en
el múltiple y en el cilindro cae la curva A a la B. Este efecto es más grande a bajas rpm
debido a que el gas permanece residente más tiempo. Las perdidas por fricción se
incrementan con el cuadrado de la velocidad, y cae la curva B a la C. A altas
velocidades, el flujo dentro del motor durante una pequeña parte de proceso de admisión
se bloquea. Cuando esto ocurre, incrementos en las rpm no incrementaran la fracción de
flujo significativamente y la eficiencia volumétrica decrecerá rápidamente (curva C a
D). El efecto de inducción RAM, a altas velocidades, eleva la curva D a la E. Retrasar el
cierre de la válvula de admisión, que tiene la ventaja de incrementar la carga a altas
rpm, resultan en una reducción de la eficiencia volumétrica a bajas velocidades debido
al backflow (curva C y D a F). Finalmente, la sintonía de los múltiples de admisión y
escape incrementan la η v (en una cantidad importante) sobre parte del rango de rpm,
curva F a G.
Figura 2.10: fenómenos que afectan la eficiencia volumétrica
22
2.5.- Combustión
En un motor convencional de encendido por chispa el aire y el combustible son
mezclados en el múltiple de admisión, introducidos a través de la válvula de admisión al
cilindro, donde se mezclan con gases residuales, y entonces son comprimidos. Bajo
condiciones normales de operación, la combustión se inicia hacia al final de la carrera
de compresión en la bujía por una descarga eléctrica. Siguiendo la inflamación, un
frente de llama turbulento se desarrolla y se propaga a través de la mezcla de aire,
combustible y gases quemados hasta que llega a las paredes del cilindro y se extingue.
La figura 2.11 muestra una secuencia de fotos de alta velocidad en un motor especial
con una cabeza de pistón de vidrio. La descarga eléctrica se produce en -30º. La primera
llama se vuelve visible en -24º. La llama, aproximadamente circular en esta vista a
través del pistón, se propaga hacia afuera desde la localización de la bujía. La forma
irregular del frente de llama es evidente. En el PMS el diámetro del frente de llama es
alrededor de 2/3 del diámetro del cilindro. El frente llega a las paredes del cilindro
desde la bujía alrededor de 15º después del PMS, pero la combustión continua en la
periferia de la cámara por unos 10º mas. Alrededor de los 10º después del PMS, una
radiación adicional, inicialmente blanca, tornándose anaranjada, centrada en la bujía se
evidencia. Esta luminosidad viene de parte de los gases ya combustionados en la
primera parte de la combustión, cuando estos son comprimidos por la alta temperatura
lograda dentro del cilindro (alrededor de 15º) mientras el resto de la carga se
combustiona.
Figura 2.11: secuencia de fotos de alta velocidad de una combustión
Características adicionales del proceso de combustión pueden verse en la figura
2.12, tomada de varios ciclos consecutivos de un motor SI. La presión en el cilindro, la
fracción de masa que ha sido quemada y la fracción de volumen del cilindro que ha sido
abarcado por el frente de llama son mostrados, todos como función de la posición del
cigüeñal. Siguiendo la descarga eléctrica, hay un periodo durante el cual la energía
liberada desde el desarrollo del frente de llama es demasiado pequeña para elevar la
presión debida a la combustión y por tanto no es distinguida. Cuando el frente continúa
avanzando a través de la cámara de combustión, la presión comienza a elevarse por
23
encima del valor que debería tener en ausencia de combustión. La presión llega a un
pico máximo después del PMS pero antes de que toda la carga sea quemada, y entonces
decrece cuando el volumen del cilindro continua incrementándose durante el resto de la
carrera de expansión.
Figura 2.12: presión en cilindro, fracción de masa quemada y fracción de
volumen quemado para 5 ciclos
El desarrollo del frente de llama y la posterior propagación obviamente varia, ciclo
a ciclo, ya que la forma de la curva de presión, volumen de la fracción inflamada y la
masa quemada para cada ciclo difiere significativamente. Esto es porque el desarrollo
del frente de llama depende del movimiento local de la mezcla y la composición en la
vecindad de la bujía en el momento de la descarga de electricidad ya que esta gobierna
la primera etapa del frente.
Notar que la curva de fracción de volumen inflamándose se eleva más rápido que la
curva de fracción de masa quemada. En gran parte, esto es porque la densidad de la
mezcla no quemada delante del frente de llama es cuatro veces más grande que la
mezcla quemada. También, hay algo de mezcla sin quemar detrás del frente visible de
llama; incluso cuando toda la cámara de combustión es inflamada, alrededor del 25% de
la masa todavía tiene que quemarse. Desde esta descripción es posible dividir al proceso
de combustión en cuatro fases distintas: (1) descarga eléctrica; (2) primer desarrollo del
frente de llama; (3) propagación del frente; y (4) finalización del frente de llama.
El evento de la combustión debe ser localizado precisamente relativo al PMS para
obtener la máxima potencia. La duración del desarrollo del frente de llama y el proceso
de propagación es típicamente entre 30 y 90 grados de cigüeñal. La combustión empieza
antes de la carrera de expansión, y finaliza después del punto en el ciclo que ocurre la
24
máxima presión en el cilindro. La curva de presión vs. ángulo de cigüeñal mostrada en
la figura 2.12a permite comprender porque varía el torque del motor (a una dada
velocidad y cond iciones en el múltiple de admisión) cuando se cambia el punto donde
se produce la descarga eléctrica. Si el comienzo de la combustión es progresivamente
avanzado antes del PMS, el trabajo transferido a la carrera de compresión (que es desde
el pistón a los gases del cilindro) se incrementa. Si el final del proceso de combustión es
progresivamente retrasado por retraso por el avance al encendido, el pico de presión
ocurre después en la carrera de expansión y es de menor magnitud. Estos cambios
reducen el trabajo transferido en la carrera de expansión desde los gases del cilindro al
pistón. El punto optimo de encendido que da el máximo torque, ocurre cuando estas dos
tendencias opuestas se cruzan. Cualquier cambio en el avance de encendido corriéndose
de este punto óptimo hace que el torque disminuya. El punto óptimo de avance
dependerá del desarrollo y propagación del frente de llama, el largo del camino a través
de la cámara de combustión y de los detalles del proceso de terminación de la llama
después de que llego a la pared. Esto depende del diseño y operación del motor y de las
propiedades del combustible, aire y mezcla de gases quemados. La figura 2.10b muestra
el efecto de la variación del punto de descarga eléctrica (avance de encendido) para un
típico motor SI.
Reglas empíricas para relacionar el perfil de masa quemada y la máxima presión en
el cilindro en el ángulo del cigüeñal en MBT son usadas. Por ejemplo, con un óptimo
avance de encendido: (1) la máxima presión ocurre alrededor de 16º después del PMS;
(2) la mitad de la carga es quemada alrededor de 10º después del PMS.
Hasta aquí describimos el normal comportamiento de la combustión en la cual el
frente de llama se mueve constantemente a través de la cámara de combustión hasta que
toda la mezcla es quemada. Sin embargo, varios factores,- composición del
combustible, ciertos diseños de motores y parámetros de operación, y depósitos en la
cámara de combustión- pueden hacer que este normal funcionamiento no ocurra. Dos
tipos de funcionamiento anormal son identificados: detonación y encendido por
superficie.
Detonación es el fenómeno anormal de la combustión mas importante. Su nombre
proviene del ruido que resulta de la auto-ignición de una porción de mezcla de
combustible, aire y gases quemados delante del frente de llama. Cuando el frente se
propaga a través de la cámara de combustión, la mezcla no quemada delante del frente llamada gas final- es comprimida, causando su incremento de presión, temperatura y
densidad. Algo de la mezcla final de aire y combustible puede sufrir reacciones
químicas antes de la normal combustión. El producto de estas reacciones puede
entonces auto inflamarse: es decir, espontáneamente y rápidamente libera una gran parte
o toda su energía. Cuando esto ocurre, el gas final se quema rápidamente, liberando su
energía en una proporción de 5 a 25 veces mas rápido que la combustión normal. Esto
causa oscilaciones de altas frecuencias dentro del cilindro que producen agudo ruido
metálico llamado detonación.
La presencia o ausencia de detonación refleja el resultado de una carrera entre
avanzar el frente de llama y las reacciones de precombustión en el gas final no
quemado. La detonación no ocurrirá si el frente de llama consume el gas final antes de
que tengan tiempo estas reacciones para causar la auto- ignición de la mezcla. La
detonación ocurrirá si las reacciones de precombustión producen auto- ignición antes de
que el frente de llama arribe.
El otro fenómeno importante de combustión anormal es el encendido superficial.
Este es la ignición de un a carga combustible-aire por válvulas o bujías sobrecalentadas,
por depósitos en la cámara de combustión, o por algún otro punto caliente en la cámara
25
de combustión del motor. Este puede ocurrir antes de que la chispa encienda la mezcla
(preignicion) o después de una ignición normal (posignicion). Puede producir una
simple llama o muchas llamas. Es evidente una combustión incontrolada y su efecto es
más severo cuando se produce preignicion. Sin embargo, incluso cuando el encendido
por superficie se produce después de la descarga eléctrica de la bujía (posignicion), esta
descarga no tiene el control completo de la combustión. El encendido por superficie
puede resultar en detonación.
El desarrollo y propagación del frente de llama depende mucho de las condiciones
en que se encuentra la mezcla de aire, combustible y gases residuales al momento de
encenderse. Estas condiciones básicamente son el movimiento que tenga el fluido en ese
momento y la composición de la mezcla, ambos en la cercanía de la bujía al momento
en que se produce la descarga eléctrica. A su vez, el movimiento del fluido depende de
algunos parámetros característicos de movimiento que describiremos a continuación:
Swirl: es usualmente definido como una rotación organizada de la mezcla alrededor
del eje del cilindro. El swirl es creado por la entrada del flujo de admisión dentro del
cilindro con un momento angular inicial. Mientras algo de swirl decae debido a la
fricción que ocurre durante el ciclo del motor, el swirl generado por la admisión
usualmente persiste a través de los procesos de compresión, combustión y expansión.
En el diseño de motores con la cámara de combustión en el pistón, el movimiento
rotacional que adquiere el fluido durante la admisión es modificado durante la
compresión. El swirl es usado en motores diesel y algunos motores de carga
estratificada para promover una mezcla más rápida entre el aire inducido y la inyección
de combustible. El swirl es también usado para acelerar el proceso de combustión en
motores de encendido por chispa. En motores dos tiempos es usado para mejorar el
vaciado del cilindro. En algunos diseños de motores con precamaras, la rotación
organizada alrededor del eje de la precamara es también llamada swirl. En la figura 2.13
se puede observa r un esquema del dispositivo utilizado para la medición de swirl.
Figura 2.13: esquema de un medidor estático de swirl
26
Squish: squish es el nombre dado a un movimiento radial interior o transversal del
gas que ocurre hacia el final de la carrera de compresión cuando una porción de la cara
del pistón y tapa de cilindro se acercan. La figura 2.14 muestra como el gas es
desplazado dentro de la cámara de combustión. La figura 2.14a muestra un típico motor
SI con cámara en cuña y la figura 2.14b muestra una típica cámara de combustión de un
motor diesel con cámara en el pistón. La cantidad de squish es definida por el porcentaje
de área de squish, es decir el porcentaje de área del pistón, pB2/4 que se acerca a la tapa
de cilindros. El movimiento del gas generado por el squish resulta de utilizar una
geometría de cámara de combustión compacta.
Figura 2.14: esquema de cómo el movimiento del pistón genera squish: (a)
cámara en cuña; (b) cámara en el pistón de un motor diesel
Una velocidad teórica de squish puede ser calculada desde el desplazamiento
instantáneo del gas a través del borde interior de la región de squish (a través de la
región rayada en la figura 2.15a y b), requerido para satisfacer la conservación de masa.
Ignorando los efectos de la dinámica de gases (presión no uniforme), fricción, fuga a
través de los aros de pistón, y transferencia de calor, la expresión para la velocidad de
squish es:
1. Cámara en el pistón
Vsq
D
= B
Sp
4z
B 2
VB
− 1
D B
A C z + VB
(2.33)
Donde VB es el volumen en el pistón, A c es la sección del cilindro (pB2 /4), S p es
la velocidad instantánea del pistón, y z es la distancia entre la cabeza del pistón y la tapa
de cilindro.
2. Cámara en cuña
27
Vsq
Sp
=
As
Z+c
1 −
b( Z + c) C + Z
(2.34)
donde A s es el área de squish, b es el ancho de la región de squish, y C es Z /( rc − 1)
evalúa el final de la inducción.
Figura 2.15: esquema de una cámara axisimetrica de un motor diesel; (b)
esquema de una cámara en cuña
28
CAPITULO III
MODELIZACION NUMERICA
29
Resumen
Este capitulo trata acerca del modelo físico- matemático que gobierna el flujo de
gases en ductos de sección variable y toberas así como de los aspectos numéricos que
posibilitan su tratamiento computacional.
Es bien sabido que la dinámica de gases en los múltiples esta regida por efectos
tridimensionales, viscosos y turbulentos y que un estudio detallado del mismo escapa
los alcances de este trabajo.
Asimismo se conoce que la implementación computacional de tal compleja
situación no es una tarea fácil y que para llevarla a cabo se requiere de un equipamiento
computacional que apenas se dispone en laboratorios informáticos dedicados
especialmente a la simulación.
Por todo esto se necesitan hacer simplificaciones o hipótesis de trabajo si uno desea
resolver un problema complejo como este utilizando los medios que se disponen.
La primera de ellas considera que el flujo es unidimensional y que los efectos en la
sección de paso del fluido son despreciables.
Además se considera que el flujo compresible es no viscoso y por lo tanto este esta
gobernado por las ecuaciones de Euler. Para tener en cuenta el drag por fricción en las
paredes, el cambio de sección a lo largo del tubo y la transferencia de calor a través de
las paredes se agregan términos fuentes a las ecuaciones. Otra de las hipótesis utilizadas
es que la mezcla de gases tanto de los reactantes como de los productos de la
combustión es uniforme (formada por una sola especie) y por lo tanto se desprecia todo
lo concerniente al balance de masa de cada una de las especies que forman parte del
fenómeno físico real. Se consideraron correcciones por turbulencia en la fricción y en el
flujo de calor trasmitido por los gases a las paredes del múltiple.
Si bien las simplificaciones hechas son muchas, cabe destacar que este tipo de
software es de utilización actual en los principales centros de desarrollo de motores del
mundo por la rapidez de cálculo y la buena precisión que se obtiene. Un análisis
detallado de todo el motor (completamente 3D), demandaría hoy tiempos muy largos y
seria una herramienta de poca eficiencia.
Desde el punto de vista numérico se utilizo una discretización espacial
unidimensional en elementos finitos con una discretización temporal según un esquema
de segundo orden TVD (total variation diminishing).
La implementación computacional fue llevada a cabo usando Fortran, un lenguaje
de programación que permitió disminuir los tiempos requeridos para la simulación, con
respecto a los que demandaba utilizando Octave.
Las primeras secciones de este capitulo introducen acerca de la dinámica de gases
en sus aspectos teóricos básicos incluyendo el análisis de discontinuidades tipo ondas de
choque que se sue len presentar en el escape, en especial apenas abre la válvula.
Posteriormente se analizan aspectos numéricos como la formulación empleada, el
tratamiento de las condiciones de contorno y las técnicas de resolución numérica de los
sistemas algebraicos resultantes de la discretización total del problema.
30
3.1. - Flujo compresible inviscido - Ecuaciones de Euler
El sistema de leyes de conservación para un flujo inviscido, llamado "las ecuaciones
de Euler", forman un sistema de ecuaciones acopladas no lineales de primer orden que
pueden ser escritas en varias formas equivalentes.
Ya que la base física de las ecuaciones de Euler es la expresión de las leyes de
conservación para masa, momento y energía, la formulación básica será derivada a
partir de la forma integral de estas leyes de conservación. Esta forma de conservación es
esencial para poder calcular correctamente velocidades de propagación e intensidad de
las discontinuidades presentes en el flujo, tal como discontinuidades de contacto u
ondas de choque que pueden ocurrir en flujo inviscido. No obstante cuando estas
estructuras fluidodinámicas no existen se pueden usar también formulaciones no
conservativas.
Varias formulaciones se pueden definir dependiendo de las variables escogidas en
el vector de estado.
Las variables conservativas son bastante usuales en este contexto y se conforman
con la densidad, el momento lineal y la energía, a saber
Ucons
ρ
= ρu
ρe
(3-1)
Ellas contienen las cantidades que efectivamente se conservan. Otras variables muy
populares porque representan la forma más directa de identificar el estado de un fluido
son aquellas formadas por la densidad, la velocidad y la presión y son llamadas
variables primitivas.
Como otra alternativa surgen las variables características o de Riemann que
representan un conjunto de variables que se propagan en el tiempo acorde a la
naturaleza hiperbólica de las ecuaciones de Euler.
Su definición es
U char
u + 2c
k
γ −1
2c
= uk −
γ −1
s
(3-2)
donde uk , c, s representan la velocidad según una dirección k, la velocidad del
sonido y la entropía a respectivamente.
Desde un punto de vista matemático uno puede plantear la equivalencia de las
ecuaciones mediante matrices de transformación entre los 3 conjuntos definidos.
A continuación solo presentaremos el problema en variables conservativas que
fueron escogidas en nuestro modelo.
31
3.2.-Formulación conservativa integral de las ecuaciones de Euler
Pensando en generalizar la definición del problema planteamos las ecuaciones de
Euler para un flujo tridimensional en un dominio formado por un volumen O encerrado
por una superficie S. Entonces las leyes de conservación se expresan mediante:
∂
ρdΩ +
∂t Ω∫
∫ ρu ⋅ ndS
∂
ρud Ω
∂t Ω∫
+
∂
ρEd Ω
∂t Ω∫
+
= 0
∫ (ρu ⊗ u + pI )⋅ ndS
=
∫ ρHu ⋅ ndS
=
∫ ρf
∫ ρf d Ω
e
(3 - 3)
Ω
S
e
⋅ ud Ω
Ω
S
donde fe representa un vector con fuerzas externas según los tres ejes cartesianos
ortogonales, I es el tensor identidad, H es la entalpía, E es la energía a total, n es la
normal al borde S y ⊗ es el producto tensorial.
Estas ecuaciones pueden ser escritas en una terna de referencia rotante cuando se
impone una velocidad angular de rotación ? constante.
En este caso la velocidad u se reemplaza por la velocidad relativa w = u – ? x r y se
tienen que agregar a las fuerzas externas las contribuciones por las fuerzas de Coriolis y
centrifuga (-2?? x w ; ?? x (? x r) ). En la ecuación de la energía a la energía a total E
se remplaza por
E* = E - (? x r) · u
(3-4.a)
y la entalpía a de estancamiento H se reemplaza por la rotalpía I,
I = H - (? x r) · u
(3-4.b)
Definiendo los siguientes arreglos:
ρu
F = ρu ⊗ u + pI
ρuH
ρ
U = ρu
ρE
=
0
uU + I p
u
(3 - 5)
0
Q = ρf e
ρf ⋅ u
e
donde U, F, Q representan el vector de estado, los flujos advectivos y un término
fuente. Es posible compactar la forma integral de la ecuaciones de Euler (3) en
32
∂
UdΩ + ∫ F ⋅ ndS = ∫ QdΩ
∂t Ω∫
S
Ω
(3 - 6)
El sistema anterior tiene que ser cerrado o completado por una ecuación de estado
definiendo las propiedades termodinámicas del fluido. En general se adopta una
ecuación de la forma p = p(?,T) con alguna definición de la energía a interna tal como e
= e(p,T). Para nuestro caso hemos tomado un gas perfecto donde p/ ? = RT y e = Cv T
con R, Cv la constante universal de los gases y el calor especifico a volumen constante
respectivamente.
3.3.-Formulación diferencial de las ecuaciones de Euler
Como proveniente del anterior sistema de ecuaciones integrales que definen las
leyes de conservación, la forma diferencial de las ecuaciones de Euler se puede expresar
como:
∂ρ
+ ∇ ⋅ (ρu ) = 0
∂t
∂ρu
+ ∇ ⋅ (ρu ⊗ u + pI ) = ρf e
∂t
∂ρE
+ ∇ ⋅ ρHu = ρf e ⋅ u
∂t
(3 - 7)
o en notación compacta
∂U
+ ∇ ⋅F = Q
∂t
(3 - 8)
3.4.-Discontinuidades - Condiciones Rankine-Hugoniot
El flujo inviscido puede experimentar discontinuidades del tipo ondas de choque o
discontinuidades de contacto que pueden ser descriptas por soluciones a la forma
integral de las leyes de conservación o por soluciones débiles de las ecuaciones de
Euler.
Las relaciones del flujo a ambos lados de la discontinuidad moviéndose con
velocidad C se conocen como las relaciones de Rankine-Hugoniot
[F] · n - C [U] · n = 0
(3-9.a)
asumiendo que las fuerzas externas fe son continuas, con [A] representando el salto
en la variable encerrada entre corchetes ([A] = A2 -A1 ) a través de la discontinuidad
donde 1,2 representan los estados aguas arriba y aguas abajo de la discontinuidad y n es
la normal a la misma.
Haciendo un poco de álgebra llegamos a que la relación anterior puede expresarse
como
33
[ρu ⋅ n ] − C ⋅ n [ρ] = 0
[(ρu ⋅ n )u + pn ] − C ⋅ n [ρu ] = 0
[ρuH ⋅ n ] − C ⋅ n[ρE ] = 0
(3 – 9b)
Si la discontinuidad fuera estacionaria entonces C = 0 y las relaciones anteriores
quedan
[ρu ⋅ n ] = 0
[(ρu ⋅ n )u + pn ] = 0
[ρuH ⋅ n ] = 0
(3 – 9c)
Aquí no entraremos en detalle acerca de los distintos tipos de discontinuidades que
físicamente pueden existir, solamente trataremos más delante algunos casos que se
fueron presentando en las aplicaciones.
3.5.-Forma cuasi-lineal de las ecuaciones de Euler
Por razones de conveniencia en el análisis matemático y numérico de las ecuaciones
de Euler estas pueden ser escritas en una versió n linealizada que consiste en aplicar la
regla de la cadena al sistema de primer orden (ecuación 3-8)
∂U ∂F
+
∇U = Q
∂t ∂U
∂U
+ A∇ U = Q
∂t
donde
A=
∂F
∂U
(3-10)
representa el jacobiano de los flujos advectivos. Es mas, en el caso de
gases que satisfacen la relación p=?f(e) como por ejemplo los gases perfectos, el flujo
advectivo satisface que F = A U entonces la definición del jacobiano advectivo es
exacta a menos del termino ∂A que en principio se desprecia y da lugar a lo que
∂U
llamamos linealizacion.
3.6.-Discretización numérica de las ecuaciones de Euler
En esta sección nos concentraremos en presentar la formulación por elementos
finitos del sistema de ecuaciones de Euler en el caso unidimensional, y en particular en
su versión estacionaria. Extensiones al caso transitorio se llevaran a cabo
posteriormente.
Es bien sabido que la forma clásica de presentar el método de los elementos finitos
es a través del método de los residuos ponderados, en particular del método de Galerkin,
donde la forma diferencial del sistema de ecuaciones se pesan con funciones de peso de
soporte compacto y se integran a lo largo del dominio. Partiendo de (3-10) obtenemos
34
∫ Ñi
Ω
∂U h
dΩ +
∂t
∂U
∫Ω Ñ i ∂t dΩ +
h
∫ Ñi
Ω
∂F h ∂U h
dΩ = ∫ Ñ i Q h
h
∂U ∂x
Ω
∂U h
Ñ
A
dΩ = ∫ Ñ i Q h
i
∫Ω
∂x
Ω
i=1,…..,Nnod
(3-11)
h
donde Ñi represente la función de peso asociada al nodo i. La variable dependiente
o de estado de nuestro problema U se aproxima usando funciones de interpolación tal
que
U h = ∑ N jU j
(3-12)
j
Los integrandos en (3-11) contienen un supraindice h que indica que representan la
versión discreta, por ejemplo, Fh = F(Uh ).
Regularmente se adopta Ñi = Ni siendo esta una propiedad del método de Galerkin,
independientemente de la forma de Ni.
Es bien conocido que esta metodología en el área de la mecánica de fluidos ha sido
objeto de un exhaustivo estudio ya que la formulación tal cual la presentamos recién
produce problemas numéricos que impiden la obtención de soluciones físicamente
plausibles. Soluciones con oscilaciones espuria s son típicas cuando se usa el método de
Garlerkin en este contexto. Este tópico ha dado lugar a una gran cantidad de trabajos
publicados acerca de métodos, formulaciones y algoritmos capaces de evitar los
inconvenientes asociados con la pérdida de estabilidad del esquema numérico en cuanto
a su discretizacion espacial y por su amplitud no será abordado en el presente trabajo. El
lector interesado puede consultar la bibliografía a mencionada en este capitulo.
Sin entrar en detalles al respecto, lo que se pretende decir es que las funciones de
peso no pueden ser elegidas tan libremente como pareciera ser habitual en otras
aplicaciones del método de los elementos finitos. Se puede demostrar que una forma de
evitar las inestabilidades espaciales en el esquema es usando funciones de peso
diferentes de la función usada para aproximar la variable de estado, o sea: Ñi ? N i dando
lugar a una familia de esquemas conocidos con el nombre de método de PetrovGalerkin.
En este trabajo hemos usado una formulación bien popular denominada SUPG y
que se basa en definir a la función de peso de la siguiente forma:
Ñ i = N i + τA
∂N i
∂x
(3-13)
donde t es conocida como matriz de tiempos intrínsecos y se define como
τ=
1
hA
2
−1
(3-14)
El caso unidimensional presenta la ventaja respecto al multidimensional que con
esta definición es posible obtener soluciones completamente estabilizadas y con gran
precisión mientras que en el caso general la definición de t no es tan directa y es
habitual utilizar definiciones que no comprometan ni la estabilidad ni la precisión.
Reemplazando (3-13) y (3-14) en (3-11) llegamos a
35
∂Ni ∂Uh
∂Ni ∂Fh ∂U
∂N
h
N
+
A
τ
d
Ω
+
N
+
∫Ω i ∂x ∂t
∫Ω i ∂x Aτ ∂Uh ∂x dΩ − ∫Ω Ni + ∂xi Aτ Q dΩ =
∂Uh
∂Ni ∂Uh
∂Fh ∂Uh
∂Ni
∂Fh ∂Uh
= ∫ Ni
dΩ + ∫
Aτ
dΩ + ∫ Ni h
dΩ + ∫
Aτ h
dΩ −
∂t
∂x
∂t
∂U ∂x
∂x
∂U ∂x
Ω
Ω
Ω
Ω
∂Ni
AτQh dΩ =
∂x
Ω
− ∫ NiQhdΩ − ∫
Ω
= ∫ Ni
Ω
(3 - 15)
∂Uh
∂N
∂Uh
∂Uh
∂N
∂Uh
dΩ + ∫ i Aτ
dΩ + ∫ Ni Ah
dΩ + ∫ i AτA
dΩ −
∂t
∂t
∂x
∂x
Ω ∂x
Ω
Ω ∂x
∂Ni
AτQh dΩ = 0
∂
x
Ω
− ∫ NiQhdΩ − ∫
Ω
i = 1,.......,Nnod
3.7.-TVD
En esta sección, el método a veces referido como aproximación local de
características junto con el esquema TVD son discutidos. La idea de este aproximación
es extender el método escalar TVD a un sistema de forma que el esquema resultante sea
TVD para el sistema local de coeficientes constantes. El procedimiento consiste en
definir en cada punto un sistema local de características variables W, y así obtener un
sistema de ecuaciones escalares desacopladas.
Consideremos el sistema hiperbólico de ecuaciones utilizado para describir el flujo
inestable y cuasi-unidimensional sin términos fuentes. Tal sistema puede ser escrito
como:
∂U ∂F ∂U ∂U
∂U
+
=
+A
=0
∂t ∂U ∂x
∂t
∂x
(3-16)
donde U es un vector con m elementos y A es una matriz constantes de m x m
elementos. Así
W = R −1U
y R −1AR = Λ
(3-17)
Uno puede entonces transformar el sistema de arriba a una forma diagonal
∂W
∂W
+Λ
=0
∂t
∂x
Λ = diag (a l ) l = 1,..., m
(3-18)
Aquí ( a l ) denota una matriz diagonal con elementos a l . La matriz R es una matriz
de transformación tal que Λ es diagonal. Entonces se aplica el esquema escalar no–
lineal para cada una de las ecuaciones escalares características.
Considerando la familia general de un parámetro de esquemas explícitos e
implícitos de la forma:
36
(
n+1
n+1
)
(
n
n
Unj +1 + λθ F j+1/ 2 − F j−1/ 2 = Unj − λ(1 − θ) F j+1/ 2 − F j−1/ 2
)
(3-19)
donde 0 ≤ θ ≤ 1 . Obviamente θ = 0 corresponde a un esquema explícito. EL flujo
numérico para el esquema TVD de segundo orden explícito o implícito de Harten-Yee,
puede ser expresado como:
F j+1/ 2 =
[
1
Fj + Fj+1 + R j+1/ 2φ j+1/ 2
2
]
(3-20)
la matriz R j+1/ 2 es R evaluada algún promedio simétrico U j y U j+ 1 . Por ejemplo:
U j+1 − U j
R j+1/ 2 = R
2
(3-21)
Otra manera de aproximar para obtener el promedio simétrico es el promedio de
Roe para un gas perfecto o equilibrio de gases reales.
El elemento del vector φ j+1/ 2 para un upwind de un esquema de segundo orden
TVD como el desarrollado por Harten y Yee es:
(φ )
SU
l
j +1/ 2
(
)(
) (
)
= σ a lj+1/2 g lg+1/ 2 + g lj − ψ a lj+1/ 2 + γ lj+1/ 2 .α lj+1/ 2
(3-22)
donde
a lj+1/ 2 son elementos de α = R −j+11/ 2 (U j+1 − U j )
σ( z) =
γ
l
j +1 / 2
[
(3-23)
]
1
∆t
ψ ( z) − λz 2 ; λ =
; ψ (z ) = z
2
∆x
(
=σ a
l
j +1 / 2
).
g lj+1/ 2 − g lj
si α lj+1/ 2 ≠ 0
αlj+1/ 2
γlj+1/ 2 = 0
(3-24)
(3-25a)
si α lj+1/ 2 = 0
(3-25b)
La función limitador (o cantidad de disipación numérica) g lj puede ser expresada de
diferentes maneras. La utilizada aquí fue:
(
g lj = min mod α lj−1/ 2 , α lj+1/ 2
{
[
)
= sgn( α lj−1/ 2 ). max 0, min α lj−1/ 2 , α lj+1/ 2 .sgn( α lj−1/ 2 )
]}
(3-26)
Yee publicó que la aproximación de características locales es mas eficiente que el
exacto de Godunov o el solver de aproximación de Riemann de Osher-Solomon y que
provee una manera natural de linealizar el esquema TVD implícito. Además, el
limitador en la aproximación actual no necesita ser el mismo para cada campo y uno
puede utilizar incluso diferentes esquemas para cada campo.
37
3.8.-Tratamiento numérico de las condiciones de contorno
Para finalizar con los aspectos numéricos utilizados en este trabajo mencionamos el
tratamiento de las condiciones de contorno. En el contexto de los elementos finitos es
muy habitual hablar de los siguientes tipos de condicio nes de contorno:
•
•
•
•
Dirichlet
Neumann
mixtas
otras
Las primeras se basan en imponer la variable de estado a tomar un valor prefijado
de antemano y garantizar que de iteración en iteración este valor no cambie. O sea
U nu +, j1 = U nu , j
∀n
(3-27)
Las condiciones de contorno naturales o Neumann se basan en imponer que la
derivada normal de la variable de estado tome un valor pero en un sentido débil, o sea
no imponiéndolo explícitamente como en (3-27) sino dentro de la formulación por
elementos finitos. Esto seria a equivalente a reemplazar el valor de la citada derivada en
todas las apariciones en la ecuación (3-15). En nuestro caso esto no sucede ya que no
aparecen contribuciones en el contorno en nuestra formulación producto de que no
hemos integrado por partes ningún término presente allí. Esto es muy habitual cuando
aparecen operadores diferenciales de segundo orden o de orden superior como en el
caso de las ecuaciones de Navier-Stokes.
Las de tipo mixta tampoco aparecen en este contexto y están mas relacionadas con
fenómenos de transferencia de calor con condiciones de contorno convectivas.
Volviendo a nuestra aplicación y desde un punto de vista experimental es muy
normal contar con valores de densidad, velocidad, presión y/o temperatura en los
contornos del dominio por lo que las condiciones Dirichlet han sido históricamente
utilizadas.
En el área de flujo compresible es muy habitual utilizar la siguiente tabla para elegir
las variables a imponer en el contorno de acuerdo a las condiciones del fluido
TABLA I
Régimen
Subsónico
Supersónico
Entrada
?u
?up
Salida
p
Libre
3.9.-Flujo cuasi-unidimensional en toberas
Es sabido que la resolución de las ecuaciones de Euler en su versión bidimensional
o tridimensional no es directa y que la validación de los códigos computacionales
requieren pasar algunos ensayos que permitan identificar la capacidad del algoritmo.
Problemas asociados con la estabilidad espacial y temporal de los esquemas
utilizados, precisión en la resolución de las discontinuidades presentes en el flujo,
tratamiento de la no linealidad del problema y de las condiciones de contorno son
38
algunos de los tópicos numéricos que definen la calidad de una formulación para la
resolución de flujo compresible.
Con el objetivo de definir problemas sencillos de validación del código es muy
interesante la simplificación que se logra tratando de resolver problemas llamados
cuasi- unidimensionales que presentan una dimensión espacial predominante frente a las
restantes. Muchas veces, en pos de adecuar el problema a los recursos computacionales
disponibles, se asume como hipótesis el carácter unidimensional del flujo. Como sucede
en este proyecto, nuestro interés se basa en poder desarrollar un código que permita
tratar el flujo en ductos de sección variable y toberas como dispositivos de un sistema
mas complejo como el que representa un motor de combustión interna. A los fines de
validar los resultados computacionales hemos escogido el flujo a través de toberas. Este
problema contiene una excelente familia de casos test para cálculo estacionario en
diversas condiciones: en particular,
•
•
•
•
flujo subsónico
flujo supersónico sin choque
transición subsónico-supersónico sin choque
subsónico-supersónico-subsónico con choque
El flujo unidimensional en toberas de sección variable S(x) se presenta resuelto en
muchos libros de texto [Hi] y aquí incluiremos una breve síntesis del mismo junto con
un procedimiento computacional para obtener la solución exacta mediante el uso de una
herramienta computacional de programación llamada Octave .
Consideremos un flujo continuo isoentrópico con una presión y temperatura de
estancamiento
p 0 = p 01
T0 = T01
(3-28.a)
indicando con un subíndice 1 las condiciones a la entrada.
La relación entre los valores de estancamiento y la variable asociada para un valor
del número de Mach M ? 0 viene dada por:
p0
p
( γ −1)
γ
ρ
= 0
ρ
γ −1
=1+
γ − 1 2 T0
M =
2
T
(3-28.b)
Llamamos sección critica S* a aquella mínima área donde se alcanzan las
condiciones sonicas. Su relación con el área S(x) y el número de Mach viene dada por:
γ +1
S
1 2
γ − 1 2 2 ( γ−1)
=
1
+
M
*
S
M γ +1
2
(3-28.c)
con M = u / γp / ρ
Ya que las condiciones sónicas si existen solo pueden alcanzarse en la coordenada
xcrit entonces el flujo másico critico se define como
39
γ +1
2 2( γ −1) *
m * = ρ*c *S * = ρ0 p 0
S
γ +1
.
(3-28.d)
.
.
Un flujo se estrangula cuando se cumple la condición que m = m * y esto se logra
si el área de la garganta de la tobera (St ) coincide con el valor crítico.
Por otro lado si se cumple que S* < St el flujo no se estrangula y el valor del numero
de Mach en la garganta dependerá de las condiciones a la entrada.
La siguiente tabla resume lo expresado en termino del numero de Mach en ciertas
zonas particulares como por ejemplo, aguas arriba de la garganta (xt -), en la propia
garganta (xt ), aguas abajo de la misma (xt +) y a la salida de la tobera (xout ).
TABLA II
Caso
1
2
3
4
5
6
xt <1
<1
<1
<1
>1
>1
xt
=1
=1
=1
<1
>1
>1
xt +
<1
>1
>1
<1
>1
>1
xout
<1
< 1 (*)
>1
<1
>1
< 1 (*)
Los casos 2 y 6 marcados con (*) presentan una discontinuidad tipo onda de choque
y deben ser analizados especialmente mediante las relaciones de Rankine-Hugoniot
aplicadas al caso de toberas. En este caso y después de cierta álgebra sobre las
ecuaciones (3-9.a-c) estas condiciones devienen en el siguiente conjunto de ecuaciones
a satisfacer en la zona del choque:
T0 = T01
M 2R =
2 + ( γ − 1) M 2L
2 γM 2L − ( γ − 1)
p R 2 γM 2L − ( γ − 1)
=
pL
γ +1
(3-29.a-d)
γ /( γ−1 )
p0R
p0L
1
( γ + 1) M 2L
2
1
1 + ( γ − 1) M 2L
2
=
{2 γ /( γ + 1) M 2L − ( γ − 1) /( γ + 1)}1/ ( γ −1)
donde los subíndices R, L representan la posición a derecha e izquierda de la
discontinuidad.
De acuerdo a los casos presentados en la tabla I debemos idear un procedimiento
que permita calcular la solución exacta. Para ello hemos utilizado el software Matlab
40
como lenguaje de programación ya que por su característica de intérprete permite una
rápida evolución del desarrollo del programa y cuenta con una interfase grafica muy
interesante para acoplar cálculo y gráficos.
El procedimiento de cálculo divide el dominio en 3 zonas, la primera va desde la
entrada hasta la garganta, la segunda desde la garganta hasta el choque y la tercera
desde el choque hasta la salida. En el caso en que el choque no exista se toma como
posición del choque aquella coincidente con la salida y la región 3 tiene dimensión nula.
En caso de que la tobera fuera o convergente o divergente la garganta coincide con la
salida o la entrada respectivamente dejando las regiones 2 y 3 nulas en el primer caso y
la región 1 nula en el segundo caso.
Algoritmo
1.- Computo del número de Mach en la zona 1
M( x )
x ∈ Ω1
según ( 23 .c )
2.- Computo de la presión de estancamiento en la zona 1
p 0 = p in ((1 +
1
( γ − 1) M in2 ) γ /( γ −1) ) según ( 23 .b )
2
3.- Computo de la presión aguas arriba del choque
p L = p 0L ((1 + ( γ − 1) / 2 M 2L ) γ /( γ −1) ) según ( 23 .b )
si existe choque entonces
4.- Computo de la presión de estancamiento aguas debajo de choque
p 0 R = f ( p 0 L , γ, M L ) según ( 24 .d )
5.- Computo del número de Mach aguas abajo del choque
MR =
( 2 + ( γ − 1) * M 2L ) /( 2 * γ * M 2L − ( γ − 1))
según ( 24 .b)
6.- Computo de la nueva sección crítica aguas abajo del choque
S*R = S*L ( M R / M L )(( 2 + ( γ − 1) * M 2L ) /( 2 + ( γ − 1) * M 2R )) (( γ + 1) / 2 /( γ −1))
7.- Computo de la presión aguas abajo del choque
p R = p 0R /(( 1 + ( γ − 1) / 2 * M 2R ) ( γ /( γ −1)) )
según ( 23 .b )
8.-Verificación de la presión aguas abajo del choque
δ p = p R / p L − ( 2 * γM 2L − ( γ − 1)) /( γ + 1) acorde a ( 24 .c )
si
δp
(p R + p L ) / 2
> ∈ entonces
41
ERROR
fsi
fsi
9.- Computo del número de Mach en la zona 3
M ( x ) x ∈ Ω 3 según ( 23 .c )
fin Algoritmo
42
CAPITULO IV
MODELIZACION NUMERICA DE VALVULAS, CILINDROS
Y UNIONES
43
Resumen
En este capitulo se presentan los detalles concernientes al modelo utilizado para el
cilindro, las válvulas de admisión y escape y las uniones. Este modelo unido al
presentado en el capitulo anterior conforman la globalidad del proyecto. De esta forma
se completa el laboratorio computacional sobre el cual ensayaremos el motor propuesto.
Como hemos dejado explicitado en el capítulo anterior los múltiples de admisión y
escape necesitan de condiciones de contornos adecuadas para poder simular el
funcionamiento del sistema. Estas condiciones de contorno son proporcionadas por el
cilindro, las válvulas y las uniones que se detallan en este capitulo. Asimismo, el
cilindro necesita de los flujos másicos y entálpicos para poder calcular los balances
globales de masa y energía que en definitiva proporcionaran las curvas de las variables
termodinámicas en función del tiempo y finalmente el ciclo indicado. Estos flujos son
calculados con datos suministrados por la evolución temporal de los múltiples. En
definitiva existe un acoplamiento entre el conjunto cilindro - válvula – múltiple - unión
que necesita ser resuelto en forma conjunta. Habiendo proporcionado los detalles
numéricos necesarios para los múltiples en el capitulo III, este dará los relacionados al
conjunto cilindro, válvulas y uniones.
El modelo de combustión empleado considera un aporte de calor producido por la
liberación de energía química del combustible en forma de una fuente externa, no
considerando las reacciones químicas que se llevan a cabo ni la disociación y
precombinación de los productos de la combustión. La dinámica de la combustión se
introduce mediante un modelo propuesto por Wiebe. Las pérdidas térmicas por
transferencia de calor son introducidas a través de un modelo de flujo térmico
convectivo debido a Woschni y ajustado empíricamente por Annand. Aquí de
desprecian las perdidas por radiación, siendo estas importantes en los motores Diesel.
Este capitulo se organiza de la siguiente manera: comenzamos con un enfoque
global del modelo y luego abordamos lo particular del cilindro, las válvulas y las
uniones. En cada caso se detallan aspectos relacionados con todo el cálculo y la
implementación computacional del mismo.
44
4.1.- Modelización numérica del motor
El modelo numérico empleado en este trabajo para simular la operación de un
motor pluricilindrico de combustión interna se halla compuesto por:
•
•
•
•
un modelo para el cilindro
un modelo para las válvulas de admisión y escape
un modelo para los múltiples de admisión y escape (ver cap. III).
un modelo de unión
La unión de cada uno estos modelos individuales conforma el sistema completo a
simular. Debido a la importancia de los fenómenos transitorios la variable tiempo juega
un rol fundamental en este problema y representa una de las variables independientes
del problema. Debido a esto debemos discretizar el problema en el tiempo para lo cual
dividimos el periodo o ciclo completo del motor en un conjunto de intervalos y en cada
uno de ellos resolvemos en forma explicita el conjunto de ecuaciones que representa
cada uno de los cuatro modelos recién presentados.
4.1.1.- El modelo del cilindro
El modelo del cilindro es un modelo de dimensión cero o también llamado modelo
de variables espaciales concentradas. Esto presupone que no nos interesa la distribución
espacial de las variables dentro del cilindro sino solamente una terna de valores;
densidad, presión y temperatura para todo el conjunto. Esto es obviamente una
simplificación ya que es sabido que los fenómenos fluidodinámicos, térmicos y
químicos que ocurren dentro del cilindro hacen al problema tridimensional.
La resolución del cilindro en cada paso de tiempo consta de resolver dos ecuaciones
diferenciales ordinarias, una para el balance de masa y otra para el balance de energía
junto a la restricción impuesta por la ley de los gases ideales y a una funcionalidad entre
la energía y los parámetros termodinámicos.
4.1.2.- El modelo de las válvulas
El modelo de las válvulas también es un modelo de dimensión nula y consiste en
resolver la evolución del flujo a través de las mismas considerando relaciones
algebraicas entre las variables que se encuentran en el múltiple vecino, en la válvula
propiamente dicha y en el cilindro.
4.1.3.- El modelo de los múltipl es
Finalmente con los valores de las variables primitivas en las uniones entre la
válvula y el múltiple y las condiciones atmosféricas es posible especificar las
condiciones de contorno del modelo unidimensional no estacionario en cada múltiple.
Esto se modela mediante una técnica de volúmenes finitos y una discretización temporal
del tipo TVD que lleva el problema matemático de resolver un sistema de ecuaciones en
derivadas parciales a otro algebraico equivalente, ambos de naturaleza no lineal. Para
mas detalles acerca de este modelo ver el capitulo anterior.
45
4.1.4.- El modelo de las uniones
El modelo de las uniones es un modelo de presión constante en el cual se considera
que todos los tubos que confluyen a la unión tienen la misma presión en todo instante en
su extremo y se considera que la entropía o entalpía en los tubos salientes esta
uniformemente distribuida, o sea, que todos los tubos salientes tienen el mismo nivel de
entropía o entalpía.
4.2.- Modelo del cilindro
Como hemos mencionado anteriormente el modelo del motor se basa en determinar
las variables termodinámicas del mismo (densidad, presión y temperatura) a través de
un balance de masa y uno de energía.
El balance de masa viene dado por:
•
•
•
m = m in + m out
•
•
(4-1)
•
donde m = ρUA , siendo m in y m out el flujo másico entrante y saliente del cilindro
hacia los múltiples de admisión y/o escape. Estos dos valores son aportados por el
modelo de las válvulas que se detalla mas adelante.
La convención de los signos que se ha adoptado aquí es considerar como positiva la
masa que ingresa al cilindro y negativa la que sale del mismo.
De esta forma la condición de contorno que el modelo de las válvulas le transfiere a
los tubos depende de que tipo de válvula estamos tratando.
Por ejemplo, si estamos analizando la admisión
•
m > 0 ⇒ Uadm
>0
N
•
m < 0 ⇒ Uadm
N < 0
•
la correspondencia entre los signos de m y la velocidad del nodo “N” del tramo de
admisión es directa.
En cambio, si analizamos el escape
•
m > 0 ⇒ Uesc
N <0
•
m < 0 ⇒ U esc
N >0
dicha correspondencia de signos es inversa.
Por lo tanto debemos especificar que tipo de válvula estamos tratando para poder
calcular las condiciones de contorno a los tubos.
El balance de energía es sencillamente la expresión del primer principio de la
termodinámica:
46
•
•
•
•
•
•
E = m in h in + m out h out − p V + Qchem − Q ht =
•
•
(4-2)
•
(( ρUA ) I h I ) − (( ρUA ) E h E ) − p V+ Q chem − Q ht
La ecuación (4-2) contiene:
•
•
flujos térmicos por la combustión ( Qchem )
•
perdidas de calor por las paredes del cilindro ( Q ht )
•
trabajo mecánico sobre el pistón p V
•
flujos entálpicos entrantes y/o salientes por las válvulas
•
•
•
∑m
j
j
hj
Todos estos términos contribuyen al término de acumulación de energía interna
total
E = me = mC v T
(4-3)
Los flujos térmicos por combustión y de perdidas por las paredes son aportados por
dos modelos que se detallan en las próximas secciones.
El trabajo mecánico contiene el producto de la presión del cilindro evaluada en el
paso de tiempo anterior y la variación de volumen del cilindro que se introduce por una
expresión algebraica que nos da el volumen en función del ángulo del cigüeñal, Vcyl(θ),
y que será presentada en las próximas secciones. Las entalpías entrantes y salientes son
aportadas por el modelo de la válvula que se detalla mas adelante.
Finalmente con los valores de cada uno de estos términos es posible calcular los
nuevos valores para la masa de gases en el cilindro y la energía a de los mismos
m
E
n +1
n +1
•
= m + m ∆t
n
•
(4-4)
= E + E ∆t
n
y a través de estos actualizar la densidad de los gases en el cilindro
ρn +1 = m n+1 / V(θ + dθ )
(4-5)
su temperatura
T n +1 =
E n+1
m n+1C v
(4-6)
y su presión a través de la ley de los gases ideales
p n +1 = R gasρ n+1T n+1
(4-7)
4.2.1.- Modelo térmico de combustión
Este modelo simple calcula la fracción de calor liberada por el combustible en cada
instante de la combustión y es entregada al modelo del cilindro para poder incluirla en
el balance de energía.
47
Existen muchos modelos para considerar este fenómeno desde los más simples,
basados en expresiones algebraicas asumiendo combustión completa de los reactantes
en productos y considerando que tanto los reactantes como los productos son una
mezcla con un único calor de formación, hasta los más complejos que introducen la
cinética química de cada especie durante el proceso de combustión. Nosotros aquí
usaremos un modelo simple que se debe a Wiebe [H] y que consiste en asumir que el
combustible entrega todo su poder calorífico m f Qf a una tasa temporal dada por una
función conocida como función "S".
Qchem = m f Qf x b
xb = 1− e
−a(
θ −θ0
∆θ
) m+1
m=2
a=5
(4-8)
•
dx b
dθ
θ− θ
θ − θ0 m 1 −a ( ∆θ0 ) m +1
= m f Qf ωa ( m + 1)(
)
e
∆θ
∆θ
Qchem = m f Qf x b = m f Qf ω
1
, θ 0 y ∆θ representan
seg
el ángulo del cigüeñal donde comienza la combustión y la duración de la misma medida
en radianes.
La figura 4-1 muestra un detalle acerca de la forma que tiene la fracción de
combustible quemada en función del ángulo del cigüeñal.
donde ω es la velocidad angular del motor expresada en
Figura 4-1: fracción de masa quemada vs. ángulo del cigüeñal
4.2.2.- Modelo de pérdidas térmicas
Las perdidas térmicas en las paredes del cilindro se pueden modelar de muchas
diferentes formas. Una de las mas populares dada su simplicidad es la que debe a
Woschni. Esta asume que existe una correlación entre dos números adimensionales de
la forma:
48
Nu = α Re m
(4-9.a)
donde α y m son dos factores que se ajustan empíricamente. Valores comunes son
α = 0.035
m = 0.8
(4-9.b)
Los números adimensionales incluidos en (4-9.a) son el número de Nusselt y el de
Reynolds cuyas definiciones son:
Nu =
Re =
h c Dc
k
S p Dc
(4-9.c)
υ
donde Dc representa el diámetro del cilindro, hc es el coeficiente pelicular de
convección térmica entre las paredes del cilindro y los gases de combustión, k es la
conductividad térmica de los gases de combustión o la mezcla fresca, según
corresponda, υ su viscosidad cinemática y Sp es la velocidad del pistón.
En este trabajo asumiremos que el cálculo no varía si se trata de la mezcla fresca o
los gases de combustión. Esto responde al hecho que no hemos considerado en este
proyecto la termoquímica de la combustión. No obstante si tendremos en cuenta el
efecto de la temperatura sobre el calor específico de la mezcla gaseosa y para ello
usaremos una formula del tipo
Cp
R gas
4
= ∑ c jT j
(4-10)
j =0
con los valores de cj dados en la siguiente tabla
Tabla I
T<1000
T>=1000
c0
c1
c2
c3
c4
3.6748
2.8963
-1.21E-03
1.52E-03
2.32E-06
-5.72E-07
-6.32E-10
9.98E-11
-2.26E-13
-6.52E-15
obtenida para una mezcla gaseosa como el nitrógeno.
Finalmente el modelo de Woschni da una potencia térmica de perdidas expresada
por la siguiente ecuación:
•
Q ht = A w h c (T − Tw )
(4-11.a)
donde Aw representa el área total del cilindro expuesta a la transferencia de calor, hc
es el coeficiente pelicular definido a continuación (4-11.b) y T-Tw es la diferencia de
temperatura entre los gases del cilindro y la pared del mismo, que se supone a
temperatura uniforme a lo largo de toda su superficie. El área junto con otras variables
49
geométricas del motor se calculan mediante un procedimiento que se detalla más
adelante.
Resumiendo, el modelo de Woschni se puede escribir como:
•
Q ht = A w h c ( T − Tw )
hc =
Nu k
Dc
Nu = 0.035 Re m
m = 0 .8
Re =
ρS p D c
µ
a 1T 3 / 2
[Pascal seg ]
a2 + T
•
ds
Sp = s = ω
dθ
µC p
k=
Pr
µ( T) =
Pr ≅ 1
(4-11.b)
donde s es la carrera del pistón cuya expresión se incluye en la próxima sección.
4.2.3.- Cálculo de variables geométricas del motor
El calculo de las variables geométricas del motor se lleva a cabo mediante una
rutina (programa) que computa, para cada posición angular del cigüeñal, el volumen del
cilindro, el área de transferencia y la tasa de variación del volumen, mediante las
siguientes expresiones:
•
carrera del pistón
s = a cos( θ) + l 2 − a 2 sin( θ) 2
•
volumen del cilindro
πD 2c
V = Vc +
( l + a − s)
4
•
(4-12.a)
(4-12.b)
área de intercambio térmico del cilindro
50
A = A ch + A p + πD c ( l + a − s)
ds
= −(sin( θ) + a 2 sin( 2θ) / 2 / l 2 − a 2 sin( θ ) 2 )
dθ
dV
2π πD 2c ds
= −ω
dt
60 4 dθ
(4-12.c)
(4-12.d)
donde
V es el volumen o cilindrada del motor,
Vc es el volumen nocivo del cilindro,
Dc es el diámetro del cilindro,
l es la longitud de la biela,
a es el radio del cigüeñal,
Ach es el área de la cabeza del cilindro,
Ap es el área de la superficie del pistón en contacto con los gases,
ω es la velocidad de rotación del motor.
4.3.- Modelo del flujo a través de las válvulas
Para poder calcular las variaciones de las condiciones de flujo en los múltiples de
admisión y las variables termodinámicas dentro del cilindro se requiere el estudio del
flujo de gases a través de las correspondientes válvulas. A los fines prácticos una
válvula puede considerarse como compuesta de una garganta o zona de asiento de la
misma y un tubo de sección variable que conecta esta garganta (1) con el múltiple (2).
Figura 4.2: Detalle de asiento de válvula. Diagrama termodinámico a través de
la válvula
51
A pesar de lo mucho que se ha investigado sobre este tópico, fue el trabajo pionero
de Jenny [J] quien aporto las mayores contribuciones a todo lo que se vino
desarrollando en este tema. Jenny sugirió tres tipos posibles de modelos para simular el
paso de fluido desde el cilindro a los múltiples o viceversa. Ellos son:
•
•
•
modelo de presión constante - motor de 4 tiempos
modelo de caída de presión - motor de 2 tiempos
modelo de ensanchamiento abrupto - unión tobera-ducto
Estos modelos aportan un conjunto de ecuaciones que vinculan o acoplan las
ecuaciones que rigen el comportamiento fluidodinámico en los tubos con lo que sucede
en el cilindro. En este trabajo nosotros elegimos el primero de los modelos (modelo a
presión constante) ya que estamos interesados en motores de cuatro tiempos.
A continuación presentamos un tratamiento para el flujo a través de válvulas típicas
en motores de 4 tiempos tanto para flujo desde el cilindro hacia el múltiple como el caso
contrario.
4.3.1.- Flujo de gases desde el cilindro al múltiple a través de una válvula
- Modelo a presión constante
Este modelo es aplicable al caso de flujo saliendo del cilindro a través de una
válvula de escape hacia el múltiple de escape o flujo saliendo del cilindro hacia el
múltiple de admisión a través de una válvula de admisión. Este último caso si bien no es
tan frecuente suele ocurrir durante periodos cortos teniendo gran influencia en el
rendimiento volumétrico del equipo.
De acuerdo a la figura 4-2 vemos que las condiciones en el motor, la válvula y el
múltiple están representadas por:
U cyl = [ρ c ; p c ; Tc ]
U valv = [ρ v ; p v ; Tv ]
U mult = ρp ; p p ; Tp
[
]
donde, el subíndice c representa la condición el cilindro, el v la de la válvula y el p
la del múltiple.
El modelo asume que los gases dejan el cilindro con la presión y la temperatura de
estancamiento y se expanden isoentropicamente en el pasaje desde la cabeza de la
válvula hasta el asiento de la misma, asumiendo que esta expansión cesa cuando la
corriente gaseosa alcanza la mínima área, que coincide con la garganta de la válvula. El
gas posteriormente se expande adiabaticamente pero en forma irreversible a presión
constante para llenar la sección completa del múltiple cuando el flujo es subsónico o
con una caída adicional de presión cuando el flujo se bloquea, alcanzando condiciones
sónicas.
Estas evoluciones termodinámicas se muestran en la figura 4-2.
Estas transformaciones se expresan matemáticamente mediante las siguientes
ecuaciones:
•
conservación de energía
52
a 2c = a 2v +
•
•
( γ − 1) 2
( γ − 1) 2
u v = a 2p +
up
2
2
(4-13.a)
ρ v u v Fv = ρp u p Fp
(4-13.b)
conservación de masa
expansion isoentropica
a c pc
=
av pv
( γ −1) / 2 γ
ρ
= c
ρv
( γ −1) / 2
(4-13.c)
γp
la velocidad del sonido.
ρ
Fp representa el área del múltiple y Fv la mínima área en el pasaje de fluido a través
de la válvula.
Con respecto al área de pasaje del flujo por la válvula, esta se calcula asumiendo
una función temporal de apertura y cierre de la misma.
La figura 4-3 muestra un detalle de la válvula junto con sus parámetros geométricos
característicos. La figura 4-4 presenta detalles acerca de la evolución en la apertura de la
misma con el ángulo del cigüeñal donde IVO corresponde al ángulo de apertura ? VO,
IVC es el ángulo de cierre ? VC. El ancho del canal por donde pasa el fluido se denomina
lift y su valor máximo viene expresado por Lvmax.
siendo a 2 =
Figura 4.3: Parámetros dimensionales
Figura 4.4: Reglaje del motor
Entonces el área de la válvula queda determinada por:
α = ( θ − θ VO ) /( θ VC − θ VO )π
L v = L v max sin( α)
2
Fv = πD v L v
(4-14)
ψ = Fv / Fp
Definimos las siguientes variables adimensionales:
53
ψ=
Fv
Fp
pp
π=(
U=
pc
up
) ( γ−1) / 2 / γ
(4-15)
ac
que serán usadas para encontrar los puntos de operación y las variables que
interesan tanto al cilindro como a los múltiples.
a) Flujo subsónico
Después trabajar algebraicamente con las ecuaciones (4-13) y (4-15), y asumiendo
que la transformación entre la garganta de la válvula y el múltiple es isobárica pp = pv
(ver figura 2), Benson [B] llega a la siguiente relación:
1
ψ 2
1
2
U
( 2 − 1) =
2
π ( γ − 1) π
1 − (( γ − 1) / 2) U
(4-16)
(b) Bloqueo en la garganta de la válvula
Cuando la relación de presión entre el múltiple y el cilindro alcanza un valor crítico
la condición en la garganta de la válvula alcanza el valor sónico. Este estado es límite ya
que solo se alcanza para ese preciso valor de la relación de presiones.
En este estado se sigue satisfaciendo que
p p = pv
π=(
2 1/ 2
)
γ +1
ψ =(
(4-17)
2 1/2
U
) (
)
2
γ +1
1 − (( γ − 1) / 2) U
(c) Bloqueo en la unión garganta múltiple
Si continuamos descendiendo la relación de presión las condiciones sónicas si bien
siguen establecidas en la garganta de la válvula se genera una onda de choque que se
ubica aguas abajo de la misma en alguna posición intermedia entre la válvula y el
múltiple.
Para este caso tenemos que
54
γ +1
2 2( γ +1) 1 − (( γ − 1) / 2) U 2
π = ψ(
)
(
)
U
γ + 1
(λ +1) / 2 λ
(4-18)
(d) Bloqueo en el múltiple
Ahora la onda de choque se establece en el múltiple y el flujo es gobernado por el
área del múltiple y no por el de la válvula.
Para esta condición tenemos
U=(
2 1/ 2
)
γ +1
(4-19)
Además de calcular las condiciones de contorno necesarias para los múltiples, el
modelo de las válvulas nos brinda información acerca del gasto másico y del flujo
entálpico a través de ellas. Esta información es utilizada por el modelo del motor para
actualizar sus variables a través de los balances de masa y energía a antes citados.
Las ecuaciones (4-16), (4-17), (4-18) y (4-19) se pueden representar gráficamente
mediante un diagrama en las variables adimensionales U y p. La figura 4-5 muestra un
esquema del mismo y la 4-6 un detalle con varias curvas diferentes para cada valor de la
variable adimensional ?.
Figura 4.5: Representación grafica de las ecuaciones 4-16…4-19
55
(e) Gasto másico a través de una válvula
•
m valv, I = C D A valv, I ρ u c u φ
•
m valv, E = C D A valv, E ρ u c u φ
C D A valve, I = πD valv, I L valv, I ( θ )
(4-20)
C D A valve, E = πD valv, E L valv,E ( θ)
φ=
[
]
2
( p d / p u ) 2 / γ −( p d / p u )( γ + 1 ) / γ
γ −1
γ +1 1 / 2
2 γ −1
γ +1
1/ 2
flujo subsonico
flujo sonico ( bloqueo)
donde los subíndices u, d corresponden a las condiciones del flujo aguas arriba y
aguas abajo respectivamente. A tal fin es necesario evaluar el sentido en el que circula
el flujo a través de la válvula para asignar estas variables.
Tanto en la figura 4.a como en la 4.b se presenta una variable adimensional extra
?. Esta representa el caudal másico a través de la válvula y se define como:
•
mac
ξ=
Fp p c
Figura 4.6: grafico para el cálculo del caudal másico
56
4.3.2.- Flujo de gases hacia el cilindro desde el múltiple a través de una válvula
Así como el flujo de gases saliendo del cilindro es una operación normal en el
proceso de escape de gases, el flujo entrando al cilindro es la correspondiente condición
normal de la admisión. Además esta condición refleja lo que sucede cuando existe
reflujo en la carrera de escape.
El gas se asume que se expande isoentropicamente a través de la válvula desde el
múltiple hasta la garganta o sección de área mínima.
El gas en la garganta se mezcla con el contenido del cilindro en un proceso donde
desaparece la velocidad de los mismos a presión constante, con un consiguiente
aumento de la entropía.
Para esta situación el único caso de interés corresponde al de flujo subsónico ya que
condiciones de bloqueo difícilmente suceden.
Benson después de hacer una analogía a con flujo entre un tubo y un reservorio
infinito llego a la conclusión que la relación entre p y U es la siguiente:
Lo que en flujo saliente viene dado por [p;U] equivale a [1/p;-U] en flujo entrante.
O sea que podemos analizar ambas situaciones usando la expresión (4-16).
Esto gráficamente lo vemos en la figura 4-7 y 4-8.
Figura 4.7
Otra alternativa planteada por Benson y que hemos utilizado en este trabajo es
considerar el caso de flujo entrando al cilindro equivalente a un extremo de un tubo
parcialmente abierto o una tobera.
4.4.- Modelo de unión
Uniones son frecuentemente encontradas en los motores pluricilindricos de
combustión interna en los múltiples de admisión y escape. Estas son unas de las más
complejas condiciones de borde para los modelos de acción de ondas.
El calculo de flujo utilizando modelos de acción de ondas requieren un tratamiento
cuasi-estático para los bordes, esto es, la solución en los bordes para cada tiempo es la
correspondiente solución estática instantánea. Por lo tanto, las ecuaciones relevantes son
aquellas que corresponden a las condiciones de flujo estático (que son, ecuaciones
57
algebraicas) y las condiciones de borde son determinadas por la solución de un sistema
de ecuaciones no lineales.
En una unión de N tubos, el numero total de combinaciones posibles de flujo son
2N, menos las dos situaciones imposibles desde el punto de vista estático. Vamos a
considerar la situación de la figura 4.9 donde p tubos traen flujo hacia la unión y q tubos
sacan flujo de la unión, obviamente satisfaciendo p + q = N.
Figura 4.9: esquema de una unión de N (p+q) tubos
El balance total de incógnitas y ecuaciones para esta situación de flujo es mostrado
en la figura 4.10. El numero de incógnitas para una unión de N tubos es 3N que
corresponde a los valores de 2 variables termodinámicas (las otras pueden ser calculadas
de las correspondientes ecuaciones de estado que no se consideran en el balance) mas el
valor de una variable cinemática, como la velocidad.
Figura 4.10: resumen de las ecuaciones necesarias para resolver la unión
Las ecuaciones que pueden ser planteadas desde un punto de vista general son
aquellas de conservación de masa y energía (dos ecuaciones) y aquellas,
correspondiendo a cada tubo, que expresa la influencia del flujo dentro del tubo sobre la
unión. Estas ultimas ecuaciones son las ecuaciones incidente características (Mach
lines) que pueden ser planteadas para cada tubo (dando N ecuaciones) y p ecuaciones
58
desde el conocimiento de la entropía para aquellos tubos en que el flujo esta saliendo de
este y entrando a la unión (path line)
Por lo tanto, 3N – (1+1+N+p) = 2N – p – 2 = N + q – 2 son necesarias para cerrar
el problema. Estas ecuaciones deberían expresar el fenómeno que ocurre en la unión.
Como puede ser observado, el número de ecuaciones requeridas para cerrar el
problema se incrementa con el número de tubos y es también dependiente de las
situaciones de flujo, ya que p o q deben ser consideradas como términos independientes.
Para cerrar el problema es necesario usar ecuaciones más o menos simplificadas y,
si es necesario para el problema, incluir coeficientes de ajustes empíricos.
Asumiendo que la presión en los extremos de los tubos que confluyen en la unión es
la misma, tenemos N – 1 ecuaciones más para cerrar el problema. Esta hipótesis es casi
realista cuando las velocidades son bajas y las perdidas de presión en la unión son
minimizadas. Asumiéndola, los efectos de un tubo de la unión sobre los otros de alguna
manera esta promediado y obviamente la geometría de la unión no tiene influencia. El
problema por lo tanto dependerá solo del número de tubos que integran la unión y no
sus características geométricas.
La hipótesis de presión constante provee N – 1 ecuaciones, pero aun faltan q -1 para
cerrar el problema. Estas q – 1 ecuaciones pueden provenir de ecuaciones ajustadas
empíricamente pero la ventaja de este acercamiento debería ser despreciable ya que la
hipótesis de presión constante fue adoptada.
Para cerrar el problema se utiliza una hipótesis en la que los flujos que salen de la
unión poseen el mismo nivel de entropía. Esto nos da q -1 ecuaciones más y el problema
que resuelto.
Resumiendo, podemos escribir las ecuaciones necesarias para tratar el modelado de
una unión de N tubos en un motor de combustión:
1. Balance de masa en la unión
N
•
∑ m j = 0 con
j=1
•
m j =ρ j Fju j ⋅ n j
(4.31)
2. Conservación de energía en la unión
N •
∑h = 0
j=1
j
•
con
c 2j
•
h j = m j(
( γ − 1)
+
1 2
u )
2 j
(4.32)
3. Conservación de las Mach Lines entrantes correspondiente a cada final de tubo
(
dp
du
) j + α jρ j,in c j,in ( ) j
dx
dx
∀j
(4.33)
∀j ∈ p
(4.34)
4. Conservación de las path lines entrantes
(
dp
dp
) j − c 2j,in ( ) j
dx
dx
5. Presión uniforme en todos los extremos de los tubos que confluyen a la unión
pi = pj
∀i ≠ j
(4.35)
6. Igualdad de entropía en los flujos saliendo de la unión
59
c 2j
c 2i
1 2
1
(
+ ui ) = (
+ u 2j ) ∀i ∈ q , i ≠ j , j ∈ q
( γ − 1) 2
( γ − 1) 2
(4.36)
Cabe mencionar que encontramos algunas dificultades en el algoritmo de cálculo de
la unión cuando el sentido de la velocidad se invierte, o sea, cuando la dirección de
velocidad esta en una condición de inestabilidad.
Quedaría para futuro incluir modelos de unión que tengan en cuenta las pérdidas de
presión e incluso la vinculación unidimensional con tridimensional, utilizando esta
última técnica para resolver el flujo en las uniones.
60
CAPITULO V
VALIDACION DEL CODIGO
61
Resumen
En este capitulo se presentan los resultados numéricos alcanzados con el software
desarrollado en este proyecto. Además de los ejemplos mostrados debajo, debemos
mencionar que se ensayaron varios motores encontrados en la bibliografía que poseían
todos los datos necesarios de entrada al simulador (datos geométricos) y todos los
resultados de la simulación, lo cual ayudo a la validación de nuestro proyecto frente a
simuladores que actua lmente están en el mercado mundial. Solo presentamos 2 motores
porque consideramos que fueron los ejemplos mas relevantes.
Los motores utilizados para la validación fueron un motor 6 cilindros que compite
actualmente en turismo carretera y un motor 4 cilindros que compite en TC2000.
Los ensayos están organizados de la siguiente manera:
-
Motor 6 cilindros: en primer término, se hizo un ensayo en busca de un mejor
reglaje de válvulas, teniendo como único objetivo el de ganar potencia, sin tener
en cuenta otros factores como ser consumo de combustible, emisiones, etc.
Posterior se construyo y ensayo dinámicamente un árbol de levas con el nuevo
reglaje en un software de análisis dinámico de mecanismos, MECANO. En
segundo término se realizo la optimización del múltiple de escape, determinado
la mejor combinación de largos y diámetros para el mismo.
-
Motor 4 cilindros: sobre el motor 4 cilindros los ensayos que se hicieron fueron
en busca de una configuración óptima de múltiples de admisión y escape, junto
con el reglaje de válvulas. También se realizo un análisis de sensibilidad de la
eficiencia volumétrica con la temperatura ambiente para diferentes múltiples de
admisión.
En ambos casos, se presenta una primera parte de puesta a punto del simulador y
posteriormente el ensayo en si, ambos con las curvas características simuladas y reales.
62
INTRODUCCION
Antes de comenzar con los ejemplos de validación del software y con el objetivo de
clarificar los ensayos presentados en este capitulo, mostraremo s un diagrama de flujo
que tiene en cuenta todos los ensayos realizados.
Diagrama de flujo de los ensayos para validación
Motor 6 cilindros – Turismo Carretera
Optimización del
árbol de levas
Optimización del
múltiple de escape
Fluidodinámica
Fluidodinámica
Motor 4 cilindros – TC2000
Optimización del
reglaje de válvulas
Optimización de los
conductos de adm.
y escape
Influencia temperatura
ambiente sobre el rend.
volumétrico
Mecánica
Fluidodinámica
Cuando en el diagrama se hace referencia a “fluidodinámica”, nos referimos a
ensayos realizados con el simulador, en donde lo que simula es la dinámica del fluido,
mientras que donde dice mecánica, el ensayo fue realizado con un software de
mecanismo sobre el tren de válvulas.
63
5.1.- MOTOR 6 CILINDROS
5.1.1.- Optimización del árbol de levas
El objetivo particular del ensayo fue, ya que es un motor utilizado para
competición, optimizar el diagrama de distribución de manera de obtener la máxima
potencia en el rango de rpm elegido. Para ello, el trabajo se dividió en dos etapas: a)
búsqueda del reglaje óptimo, o sea, de los tiempos de apertura y cierre de cada una de
las válvulas que maximicen la potencia; b) construcción y ensayo dinámico de un perfil
de alzada de válvula que cumpla con el reglaje determinado en la etapa anterior y haga
máxima el área de pasaje de flujo a través de la válvula, garantizando el
comportamiento mecánico, o sea, sin despegar, sin rebotar y sin interferir con el pistón.
5.1.1.1.- Primera etapa - Estudio fluidodinámico
Un diagrama esquemático del motor tal cual ingresado en el simulador es el de la
figura 5-1. En el se aprecian las distintas partes y elementos constitutivos así como los
sensores virtuales usados para el desarrollo.
Sensor 3
Sensor 2
Sensor 4
Sensor 1
Multiple de
admision
Cilindro y tapa
de cilindros
Multiple de
escape
Figura 5-1: esquema del motor ensayado
Descripción de cada una de las partes:
Múltiple de admisión: constituido por 10 tubos mas 4 uniones que los vinculan. El
carburador se considera a mariposa totalmente abierta por lo que no se tiene en cuenta la
64
perdida de carga producida en él. La temperatura de la pared de los tubos se considero
constante para todos ellos e igual a 20ºC.
Tapa de cilindros: constituida por el tramo de múltiple que esta dentro de ella mas
las características de las válvulas. Cada cilindro lleva una válvula de admisión y una de
escape.
Cilindro: el diámetro 97mm, la carrera 67.5mm, el largo de biela 163mm y la
relación de compresión 9.5:1. La temperatura de la pared fue tomada en función de los
datos suministrados por el banco de pruebas de temperatura de los líquidos refrigerantes
(agua y aceite).
Múltiple de escape: constituido por 9 tubos y 3 uniones que forman los múltiples
primarios, secundarios y terciario.
Esta primera etapa a su vez fue dividida en
calibración y la segunda de optimización.
dos sub-etapas: la primera de
5.1.1.1.1.- Calibración
Dado que cada motor tiene características muy particulares y diferentes a los
demás, para hacer la simulación debemos calibrar el simulador de manera que este sea
representativo del motor a simular. Para ello debemos disponer de algunos datos reales
extraídos del banco de pruebas contra los cuales vamos a comparar los datos salidos del
simulador, cosa que nos permitirá ajustar algunas variables.
Para esta simulación disponemos de los siguientes datos reales extraídos del
banco de pruebas con sus variables de ajuste:
a)
Flujometria de la tapa de cilindros: obtenido de un flujometro convencional
estático con una diferencia de presión de 10” columna de H2 O. Haciendo el
mismo ensayo con nuestro código, tenemos una idea de los coeficientes de
descarga CD de cada una de las válvulas.
Los valores obtenidos de esta manera son estimativos de los que usaremos, ya que
no tienen en cuenta consideraciones del tipo dinámicas que son determinantes. El ajuste
final de los CD de cada válvula se hace aproximando la curva real de caudal de aire
consumido por el motor vs. las rpm con la simulada.
65
COEFICIENTE DE DESCARGA
0.35
0.30
CD
0.25
0.20
0.15
0.10
0.05
0.00
0
5
10
15
20
alzada de valvula
Figura 5-2: Coeficientes de descarga de la tapa de cilindros
b)
Temperatura de los gases de escape: obtenida con termocuplas ubicadas a
300mm desde la tapa de cilindros. Esta temperatura, promediada en los 6
cilindros, nos da indicios de cómo varia la combustión (la finalización) en
función de las rpm, o sea, de cómo la duración de esta varia en grados del
cigüeñal a medida que aumentan las rpm del motor. En esta curva (temperatura
vs. rpm) hay dos cosas a tener en cuenta:
1-
La pendiente de la curva representa como la finalización de la
combustión a medida que crecen las rpm se acerca a la apertura de la válvula
de escape (por el aumento de temperatura) por lo que permite aproximar la
diferencia que hay entre los grados que dura la combustión a bajas y altas
rpm. Si llamamos ?fb los grados donde finaliza la combustión a bajas rpm y
? fa los grados donde finaliza a altas rpm, la pendiente nos dice el valor de (? fa
- ? fb). Esto se obtiene manteniendo el inicio de la combustión fijo.
1250
1200
1150
1100
1050
1000
950
900
5500
6500
7500
Curva 1
8500
9500
10500
Curva 2
Figura 5-3: temperaturas para combustiones con distinto (?fa - ?fb)
66
La curva 1 representa una combustión con un delta de duración mayor que la
curva 2, a esto se debe la mayor pendiente.
(? fa - ? fb)1 > (?fa - ? fb)2
2-
El valor de la temperatura nos dice cuanto dura la combustión. Variando
la duración de la combustión (siempre manteniendo la diferencia en grados
obtenida en el punto 1 para mantener la pendiente), podemos variar el valor
de la temperatura en cada rpm y aproximarla a los valores experimentales.
1300
1250
1200
1150
1100
1050
1000
950
900
5500
6500
7500
Curva 1
8500
9500
10500
Curva 2
Figura 5-4: temperaturas para combustiones con distinto (?f - ?i)
La curva 1 representa la una combustión que finaliza mas cerca de la apertura de
la válvula de escape que la de la curva 2, o sea, que tiene mayor duración en grados
(cabe recordar que el inicio de la combustión es fijo y determinado por el avance al
encendido que tenga el motor).
(? f - ?i)1 > (? f - ?i)2
siendo ?f: grados donde finaliza la combustión y ?i: grados donde se inicia la
combustión.
c)
Curva de torque y potencia: con esta podemos predecir de manera indirecta
los coeficientes de transferencia de calor en el cilindro. Este coeficientes en
definitiva desplaza la curva de torque y potencia hacia valores mayores o
menores según sea el coeficiente mas chico o mas grande respectivamente, sin
cambiar sustancialmente su forma, con lo cual con los datos reales podemos
estimar el coeficiente.
67
270
250
230
210
190
170
150
5500
6500
7500
8500
Curva 1
9500
10500
Curva 2
Figura 5-5: potencias para distintos coef. de transferencia de calor en el
cilindro
La curva 1 representa una simulación con un coeficiente de transferencia de calor
en el cilindro menor que el de la curva 2, es por eso que la potencia es mayor.
d)
Caudal másico de aire y combustible: con este dato obtenemos una relación
aire/combustible promedio. Debido a que este motor es a carburador debemos
realizar este paso, en caso de que fuera inyección el valor es constante en todas
las rpm y conocido.
Resumiendo, podemos hacer el siguiente cuadro:
Dato Real
Flujometria de la tapa de cilindros
Temperatura de los gases de escape
Torque y Potencia
Caudal másico de aire y combustible
Variable Ajustada
Coeficientes de descarga
?fb y ?fa (combustión)
Coef. de transferencia de calor
Relación aire/combustible
68
Curvas obtenidas luego de la calibración
Los resultados obtenidos en la simulación son mostrados juntos con los obtenidos
en el banco de ensayos.
La figura 5-6, muestra las curvas de torque y potencia, mientras que las figuras 57, 5-8 y 5-9 muestran la temperatura de los gases de escape, el caudal másico de aire y
el caudal másico de combustible respectivamente.
La diferencia que existe en el consumo de combustible, es principalmente debido
a la variación que hay en el motor real de la relación aire/combustible causada por el
sistema dosificador del combustible, mientras que en el simulador esta relación es fija y
es promedio de la relación real.
Las curvas simuladas son similares comparadas con las reales, aunque existen
algunas diferencias debidas a simplificaciones, que se adoptaron según datos
encontrados en la bibliografía especializada en el tema.
290
270
[HP] [Nm]
250
230
210
190
170
150
5500
6500
7500
8500
9500
rpm
TorqueSim
PotenciaSim
TorqueReal
PotenciaReal
Figura 5-6: torque y potencia real y simulada
69
1500
1400
[ºF]
1300
1200
1100
1000
900
800
5500
6500
7500
8500
9500
10500
rpm
TempSim
TempReal
Figura 5-7: temperatura del escape
1500
1400
[Lbs/Hr]
1300
1200
1100
1000
900
800
5500
6500
7500
8500
9500
10500
rpm
MasaAireSim
MasaAireReal
Figura 5-8: caudal másico de aire
70
115
110
[Lbs/hr]
105
100
95
90
85
80
75
70
5500
6500
7500
8500
9500
rpm
MasaCombSim
MasaCombReal
Figura 5-9: caudal másico de combustible
5.1.1.1.2.- Optimización
En esta sub-etapa del trabajo, se ensayaron cambios en la configuración del árbol de
levas, en busca de una configuración que nos de una mayor performance. Esta se dividió
en tres partes a saber: una primera en donde con el árbol de levas original, se modifico
su posición relativa respecto al cigüeñal, es decir, se lo avanzo y retraso con respecto a
aquel. La segunda etapa se hizo tomando los camones originales por separado y
moviéndolos respecto de su posición original pero individualmente. En la tercera etapa
se trabajo sobre nuevos diagramas de levas.
Un cuadro del estudio puede ser el siguiente:
Cambios en el árbol de levas
Levas originales
Movimiento
Conjunto
Avance
Retroceso
Levas nuevas
Movimiento
Independiente
Admisión
Escape
Admisión
Escape
+AAA
+AAE
+RCA
+RCE
Avance
Retroceso
71
Primera parte: se hicieron dos simulaciones, una con un árbol de levas avanzado
3° y otra con el mismo retrasado 3°, ambos desplazamientos con respecto al cigüeñal.
Las curvas resultantes se muestran en la figura 5-10 junto con la que corresponde a la
configuración original. Es posible ver en esta figura como al retrasar el árbol de levas el
motor rinde mas a altas rpm perdiendo algo de potencia a bajas y todo lo contrario
cuando lo avanzamos.
Segunda parte: esta segunda parte a su ves, podemos dividirla en dos, una primera
en la que fijando el camon de escape en su posición original, se movió el camon de
admisión a ambos lados de la posición original de su centro, y una segunda en donde
fijando el camon de admisión en su posición original, se movió el de escape también a
ambos lados de su centro original. Los resultados de estos cambios pueden verse en la
figuras 5-11 y 5-12. En estas podemos observar porcentajes de ganancia o pérdida de
potencia respecto a la entregada por la configuración original.
Tercera parte: en esta se modificaron los grados de permanencia de las válvulas,
de manera de poder observar las reacciones del motor ante tales cambios y poder
concluir en un reglaje de mayor performance. En las figuras 5-13 y 5-14 se muestran,
igual que en la segunda parte, porcentajes de ganancia o pérdidas con respecto al reglaje
original. En la figura 5-13 todos los cambios son sobre el timing de la leva de admisión,
mientras que en la 5-14 sobre la leva de escape. Cada uno de los cambios fueron hechos
manteniendo constante y en su valor original el resto de los tiempos de apertura y cierre.
Estos, por ejemplo, cuando se indica AAA+5°, es un avance a la apertura de admisión
mayor (en 5°) con el resto de los tiempos en su valor original.
102.5
102.0
101.5
[%]
101.0
100.5
100.0
99.5
99.0
98.5
5800
6800
Retrasando 3º
7800
Original
8800
Avansando 3º°
Figura 5-10: comparación entre curvas con distintas puestas a punto del árbol
de levas
72
101.5
101.0
100.5
100.0
99.5
99.0
98.5
5800
6300
6800
7300
7800
8300
8800
9300
RPM
Av 6°
Av 3º
Orig
Ret 3°
Ret 6°
Figura 5-11: comparación moviendo camon de admisión respecto a su posición
original
103.0
102.0
101.0
100.0
99.0
98.0
97.0
5800
6300
6800
7300
7800
8300
8800
9300
RPM
Av 6°
Av 3
Orig
Ret 3°
Ret 6°
Ret 9°
Ret 12°
Ret 15°
Figura 5-12: comparación moviendo el camon de escape respecto a su posición
original
73
102.5
102.0
101.5
101.0
100.5
100.0
99.5
99.0
98.5
5500
6000
6500
7000
7500
8000
8500
9000
9500
10000
RPM
RCA+5°
RCA+10°
AAA+5°
AAA+10°
Figura 5-13: comparación moviendo el timing de admisión
107.0
106.0
105.0
[%]
104.0
103.0
102.0
101.0
100.0
99.0
5500
6000
6500
7000
7500
8000
8500
9000
9500
10000
RPM
AAE+5°
AAE+10°
RCE+5°
RCE+10°
Series3
AAAyRCE+10°
Figura 5-14: comparación moviendo el timing de escape
74
Estas ganancias en potencia que se obtuvieron trabajando sobre la leva de escape
pueden ser atribuidas a una mayor velocidad del flujo en la válvula de escape en el
momento del cruce, que se traduce en una mayor depresión dentro del cilindro y como
consecuencia una mayor cantidad de masa atrapa de aire fresco como puede verse en las
figuras 5-15, 5-16 y 5-17. Estas figuras fueron obtenidas para 8500 rpm.
Velocidades del fluido atraves de las valvulas
250
200
[m/s]
150
100
50
0
-300
-200
-100
AAE
0
AAA
100
200
RCE
300
RCA
Figura 5-15: en azul la conf. original y en rojo con RCE+10°
Masa de fluido atraves de las valvulas
0.2
0.15
[Kg/s]
0.1
0.05
0
-0.05
-0.1
-300
AAE
-200
-100
0
AAA
100
RCE
200
300
RCA
Figura 5-16: en azul la conf. original y en rojo con RCE+10°
75
Presion en el Cilindro
2
1.8
[atm]
1.6
1.4
1.2
1
0.8
0.6
-300
AAE
-200
-100
0
AAA
100
RCE
200
300
RCA
Figura 5-17: en azul la conf. origina l y en rojo con RCE+10°
Conclusión
Con los ensayos que se realizaron a lo largo del trabajo, podemos concluir que
existen potenciales ganancias trabajando sobre la leva de escape, especialmente en la
zona que corresponde al cierre de esta.
Es particularmente importante el cruce que tenga el árbol de levas cuando lo que
se busca son ganancias de potencias en toda la gama de rpm, y no en una zona en
particular, como puede apreciarse en las distintas figuras. De lo contrario, si el objetivo
es ganar potencia en alguna zona en particular, podría trabajarse sobre el resto de los
tiempos que definen el reglaje, poniendo especial atención en el RCA.
5.1.1.2.- Segunda parte - Estudio mecánico
En esta segunda etapa, con los resultados obtenidos en la primera (reglaje de
ambas válvulas) se construyo el perfil del árbol de levas, y al mismo tiempo se simulo
su comportamiento dinámico junto con todo el tren de válvulas. El software utilizado
para esta etapa fue Mecano.
Para determinar el perfil se utilizo un programa desarrollado en Matlab (1) que en
función de las características requeridas (reglaje, alzada máxima, aceleración máximas y
mínimas, etc.) optimiza la curva descripta por la alzada de válvula de manera que el
área encerrada por esta se máxima.
Una vez definido el perfil de alzada de válvula, se construyo a través de la
cinemática inversa el perfil del árbol de levas. Con este perfil se hizo la simulación en
Mecano.
76
Cabe recordar que esta etapa es de interaccion entre el perfil optimizado por
MatLab y la simulación dinámica en Mecano, es decir se ensayaron distintos perfiles
hasta obtener uno que cumplió con nuestros objetivos.
5.1.1.2.1.- Construcción del perfil de alzada de válvula
Dado que en la primera etapa fue notoria la gananc ia de potencia obtenida cuando
modificábamos el perfil de la leva de escape, en esta etapa se construirá un perfil con
los reglajes óptimos obtenidos anteriormente. Trabajar sobre una leva de admisión, por
lo estudiado, no tendría ganancias relevantes, al menos, en una primera etapa.
Para la construcción de la leva de escape se uso un optimizador de levas, en el
cual se ingresan algunos parámetros dimensionales y otros de carácter dinámico y este
nos devuelve un perfil de alzada de válvula que tendrá la máxima área encerrada
respetando todas las restricciones impuestas. Entre los más importantes están:
-
Angulos de apertura y cierre: obtenidos en la etapa uno.
-
Alzada máxima: igual a la actual.
-
Aceleración máxima positivas: obtenidas del actual perfil de leva. Con este
valor de aceleraciones garantizamos que todos los esfuerzos (directamente
proporcionales a este valor) serán soportados por el mecanismo sin roturas ni
grandes deformaciones.
-
Aceleración máximas negativas: dadas por una situación de compromiso entre
desacelerar rápidamente para maximizar el área y garantizar que no haya
despegue del seguidor en ningún momento de funcionamiento, cosa totalmente
indeseable, porque deja la leva de controlar el movimiento de la válvula y es
una fuente de potenciales roturas.
-
Altura y velocidad de rampas: la altura de la rampa es función de la luz de
válvula que utilizan en el motor y fue dada por el preparador, mientras que las
velocidades son las recomendadas por la mayoría de los constructores de
árboles de levas y van desde 0.4-0.6m/s.
-
Distancias al pistón y a la otra válvula para evitar interferencias: dadas por la
configuración geométrica propia del motor.
Después de varias iteraciones se obtuvo un perfil que conformo en cuanto a su
comportamiento mecánico y que tiene las características mostradas en las figuras 5-18,
5-19, 5-20, 5-21 y 5-22. Cabe destacar que estas graficas corresponden al perfil de
alzada del botador, no de la válvula y están hechas para 9500 rpm.
77
Figura 5-18: perfil de la leva de escape
12
10
8
6
4
2
0
0
100
200
300
400
500
600
700
Figura 5-19: perfil de alzada del botador
78
0
100
200
300
400
500
600
700
Figura 5-20: perfil de velocidad
Figura 5-21: perfil de aceleración
79
Figura 5-22: perfil de jerck
5.1.1.2.2.- Simulación dinámica
Con los perfiles obtenidos de la etapa anterior, se simulo dinámicamente el
comportamiento del sistema, hasta tener un comportamiento que nos situó en mejores
condiciones que lo que actualmente utilizaba el motor estudiado, y cumplía con nuestros
objetivos. Los resultados mostrados debajo corresponden al perfil de alzada indicado en
las figuras anteriores.
El esquema en donde se ven todos los elementos que constituyen la cadena
cinemática de la distribución que se ensayo es el de la figura 5-23. En el se observa una
configuración típica de un motor varillero, con seguidor a rodillo.
80
Figura 5-23: esquema de la distribución en Mecano
Detalle de cada uno de los elementos
Leva-seguidor: es el elemento por donde ingresa el movimiento del mecanismo. El
perfil de la leva esta dado por 180 puntos vinculados con arcos de círculo.
Botador: en la simulación considerado como cuerpo rígido dado su tamaño y
robustez con respecto al resto de los elementos.
Vinculo Botador-Varilla: resuelto con un resorte con un comportamiento particular
según este solicitado a tracción o compresión. A compresión tiene una constante de
rigidez similar a la del acero, mientras que a tracción no ofrece resistencia (k=0).
Varilla: es el único elemento del sistema en el que se tuvo en cuenta la flexibilidad.
Discretizado con 4 elementos de viga.
Balancín: de la misma manera que el botador, el balancín es considerado como un
cuerpo rígido. Este tiene en su contacto con la válvula, un rodillo que se resolvió con
otro elemento leva-seguidor.
Resorte de válvula: se discritizó en 8 subresortes que proporcionan la misma
constante y masa que el real. Con esta discretización lo que se persigue es tener en
81
cuenta el movimiento independiente que puede sufrir cada espira con su consecuente
efecto sobre todo el sistema. En la figura 5-24 se aprecia en detalle.
Figura 5-24: detalle del resorte de válvula
Válvula: considerada también cuerpo rígido. No se tuvo en cuenta la luz de válvula
a la hora de la simulación para evitar despegues. Tampoco se considero el asiento de
válvula por la misma razón.
Resultados de la simulación
El ensayo se hizo en el rango máximo de rpm en el cual el motor se encuentra con
mayor frecuencia. O sea, se hizo un barrido desde 8000 a 10000 rpm cada 150 y en
cada una de ellas la leva giro 5 vueltas. Con esta estrategia se consiguió ver de manera
más clara el comportamiento del perfil, que si solo se hubiera hecho en la máxima rpm,
ya que en este caso la leva no traería la historia del movimiento de las rpm anteriores, lo
cual modifica sustancialmente los resultados.
Como en la simulación intervienen algunas variables de difícil determinación
teórica, sino imposible, y dada la imposibilidad de hacer los ensayos experimentales
necesarios para obtenerlas, el objetivo se centro desde un punto de vista mas cualitativo
que cuantitativo, con lo que se tomo como base el actual perfil que equipa al motor y el
cual esta probado que mecánicamente funciona.
Con respecto a cuales son los puntos más sobresalientes que hay que garantizar,
uno de los principales es que no halla despegue en ninguna de las vinculaciones del
mecanismo, ya que esto podría causar consecuencias impredecibles, sobre todo en el
tiempo. Otro de los parámetros a tener en cuente son las máximas aceleraciones a que
están sometidos los elementos ya que esto podría ocasionar esfuerzos que comprometan
la resistencia mecánica de ellos. De todas maneras, como se dijo mas arriba lo que se
82
busca es no estar en peores condiciones en los puntos citados con respecto a lo que
actualmente esta funcionando. El aporte de este trabajo vendría dado no tanto por una
mejora mecánica importante del perfil, sino por el nuevo reglaje que se determino en la
primera etapa y el cual debería mejorar desde un punto de vista fluidodinamico.
Además de todo lo mencionado se hizo otro ensayo de las mismas características
pero proponiendo elementos de menor peso (botador, -20%) y de menor momento de
inercia (balancín, -30%) para ver cuan importante eran esos parámetros en el
comportamiento dinámico de todo el mecanismo.
Algunos de los parámetros importantes son mostrados en las figuras 5-25, 5-26 y
5-27. En ellas se observan los esfuerzos de compresión al cual esta sometido el conjunto
leva seguidor, los esfuerzos sobre la unión entre la varilla y el balancín y los esfuerzos
en la válvula. Todas las graficas muestran una doble curva que corresponden a la
simulación con los elementos originales (verde) y a la simulación con elementos
propuestos (azul). Solo se muestran los gráficos para una rpm, ya que el resto se
comportan, al igual que esta, de manera satisfactoria teniendo en cuenta nuestras
exigencias.
Figura 5-25: fuerza de contacto la leva y el seguidor
83
Figura 5-26: fuerza de contacto entre la varilla y el balancín
Figura 5-27: fuerza de contacto entre el rodillo del balancín y la válvula
84
5.1.2.- Optimización del múltiple de escape
La optimización del múltiple de escape del mismo motor que anteriormente se hizo
la optimización del diagrama de levas consistió básicamente en determinar los diámetro
y largos de cada una de las partes (primario, secundario y terciario o trombón) que
componen el múltiple.
La estrategia de optimización fue proponiendo diámetros y haciendo barridos en los
largos. Cabe destacar que la primera validación que se hizo para esta etapa fue
comprobar que el múltiple actual, con los diámetros actuales, tenía los largos óptimos
como realmente el banco de pruebas indicó, ya que en este, el múltiple de escape tiene
la posibilidad de variar sus largos. Como después se vera en los gráficos, efectivamente
el simulador indicó que los largos óptimos para los diámetros actuales son los que
utilizan.
En cada uno de los ensayos se indica la configuración del escape analizado (largos y
diámetros en mm) y 2 gráficos, el primero indica diferencias en HP de la nueva
propuesta contra la que actualmente utilizan y una curva de promedio entre 7000 y
9000rpm vs. largos de los tubos.
Los largos y diámetros de los distintos múltiples ensayados están indicados en
valores relativos al original.
TERCIARIO O
TROMBON
SECUNDARIO
PRIMARIO
85
1- ) Variación del largo del primario con el diámetro original
ESPECIFICACIONES
Tubo
Largo Diametro
primario
variable
orig.
secundario
orig.
orig.
terciario
orig.
orig.
20.0
15.0
10.0
5.0
0.0
-5.0
-10.0
-15.0
-20.0
-25.0
-30.0
-35.0
5500
-170
6000
6500
-120
7000
-70
7500
-20
8000
30
8500
80
9000
130
9500
180
10000
230
2.0
0.0
-0.47
-2.0
-4.0
0.06
-0.71
-2.32
-4.50
-3.22
-3.87
-6.0
-7.65
-8.0
-10.0
-12.0
-14.0
-190
-12.76
-140
-90
-40
10
60
110
160
210
Promedio (7000-9000)
86
2- ) Variación del largo del primario con un diámetro de 3.5mm menor que el
original
ESPECIFICACIONES
Tubo
Largo Diametro
primario
variable
-3.5
secundario
orig
orig
terciario
orig
orig
15.0
10.0
5.0
0.0
-5.0
-10.0
-15.0
-20.0
-25.0
-30.0
-35.0
5500
-170
6000
-120
6500
-70
7000
-20
7500
+30
8000
8500
+80
9000
+120
9500
+170
10000
+230
0.0
-2.0
-2.92
-2.56
-1.73
-1.04
-1.74
-3.70
-4.0
-6.0
-7.18
-8.0
-10.0
-12.0
-12.00
-14.0
-16.0
-18.0
-190
-16.97
-140
-90
-40
10
60
110
160
210
Promedio (7000-9000)
87
3- ) Variación del largo del primario con un diámetro de 2.9mm mayor que el
original
ESPECIFICACIONES
Tubo
Largo Diametro
primario
variable
+2.9
secundario
orig
orig
terciario
orig
orig
15.0
10.0
5.0
0.0
-5.0
-10.0
-15.0
-20.0
-25.0
-30.0
5500
-170
6000
6500
-120
-70
7000
-20
7500
8000
+30
8500
+80
9000
+130
9500
+180
10000
+230
2.0
1.04
1.0
0.49
0.44
0.0
-1.0
-1.03
-2.0
-2.05
-2.94
-3.0
-4.0
-4.41
-4.02
-5.0
-6.0
-7.0
-190
-6.26
-140
-90
-40
10
60
110
160
210
Promedio (7000-9000)
88
4- ) Variación del largo del secundario con el diámetro de original
ESPECIFICACIONES
Tubo
Largo Diametro
primario
orig
orig
secundario
variable
orig
terciario
orig
orig
4.0
3.0
2.0
1.0
0.0
-1.0
-2.0
-3.0
-4.0
5500
6000
-200
6500
-150
7000
-100
7500
-50
8000
0
8500
+50
9000
+100
9500
+150
10000
+200
0.80
0.60
0.40
0.20
0.00
0.02
-0.03
0.04
0.00
-0.10
-0.05
-0.16
-0.20
-0.17
-0.14
-0.40
-0.60
-0.80
-220
-170
-120
-70
-20
30
80
130
180
Promedio (7000-9000)
89
5- ) Variación del largo del secundario con un diámetro 3.2mm menor que el
original
ESPECIFICACIONES
Tubo
Largo Diametro
primario
orig
orig
secundario
variable
-3.2
terciario
orig
orig
3.0
2.0
1.0
0.0
-1.0
-2.0
-3.0
-4.0
5500
6000
-200
6500
-150
7000
-100
7500
-50
8000
8500
0
+50
-0.45
-0.48
9000
+100
9500
10000
+150
1.0
0.5
0.0
-0.5
-0.48
-0.40
-0.51
-0.56
-0.65
-0.72
-1.0
-1.5
-2.0
-220
-170
-120
-70
-20
30
80
130
180
Promedio (7000-9000)
90
6- ) Variación del largo del terciario cónico con diámetros originales
ESPECIFICACIONES
Tubo
Largo Diametro
primario
orig
orig
secundario
orig
orig
terciario
variable
orig
4.0
3.0
2.0
1.0
0.0
-1.0
-2.0
-3.0
-4.0
6000
6500
7000
-150
7500
-100
8000
-50
8500
orig
9000
+50
9500
+100
10000
+150
0.80
0.60
0.40
0.20
0.02
0.00
0.02
-0.06
0.00
-0.04
-0.16
-0.20
-0.10
-0.40
-0.60
-0.80
-220
-170
-120
-70
-20
30
80
130
180
Promedio (7000-9000)
91
De todos los ensayos hechos arriba, la primera conclusión que obtene mos es que el
sector determinante para el comportamiento de un múltiple de escape son los tubos
primarios. Es este prácticamente quien determina el comportamiento del escape. Es
resto (secundario y terciario) ayudan al primario a que funcione correctamente, pero sus
influencias son menores.
Una segunda conclusión es que un diámetro de los tubos del primario mayor al que
utilizan, produce un mayor rendimiento en promedio al original, debiendo este tener un
largo mayor.
Con estas primeras conclusiones en mente, nos abocamos a trabajar sobre los tubos
primarios del múltiple buscando una configuración con la que obtengamos mayor
rendimiento. Concretamente, observando las tendencias actuales de escapes de motores
de ultima generación que compiten en categorías internacionales, ensayamos tubos
primarios progresivos, o sea, salen del motor con un diámetro para a una cierta distancia
(siempre hablando del tu primario) pasar a un diámetro mayor. En este caso estaría
compuesto por dos diámetros, pero analizaremos la posibilidad de utilizar primarios con
3 diámetros.
92
7- ) Variación del largo del primario progresivo con diámetros -3.5mm ,
+2.9mm con respecto al original. La unión del primario progresivo se encuentra en
la mitad de su largo.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
variable(50%) -3.5 , +2.9
secundario
orig
orig
terciario
orig
orig
15.0
10.0
5.0
0.0
-5.0
-10.0
-15.0
-20.0
-25.0
5500
6000
-170
6500
-120
7000
-70
-20
7500
+30
8000
8500
+80
9000
+130
9500
+180
10000
+230
1.0
0.22
0.0
-0.18
-1.0
-0.30
-1.30
-1.91
-2.0
-2.18
-2.50
-3.0
-3.02
-4.0
-5.0
-6.0
-190
-5.28
-140
-90
-40
10
60
110
160
210
Promedio (7000-9000)
93
8- ) Variación de la posición de la unión con respecto al mejor largo obtenido
en el ensayo anterior.
ESPECIFICACIONES
Tubo
Largo Diametro
primario
+80
-3.5 , -2.9
secundario
orig
orig
terciario
orig
orig
Moviendo union progresivo
6.0
4.0
2.0
0.0
-2.0
-4.0
-6.0
-8.0
6000
6500
7000
25%
7500
35%
8000
45%
8500
9000
55%
65%
9500
10000
75%
1.5
1.0
0.92
0.68
0.5
0.40
0.09
0.0
-0.41
-0.5
-1.0
-1.08
-1.5
20
30
40
50
60
70
80
Promedio (7000-9000)
94
9- ) Variación del largo del primario progresivo con diámetros original ,
+2.9mm con respecto al original. La unión del primario progresivo se encuentra en
la mitad de su largo.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
variable orig , +2.9
secundario
orig
orig
terciario
orig
orig
20.0
15.0
10.0
5.0
0.0
-5.0
-10.0
-15.0
-20.0
-25.0
-30.0
6000
6500
-170
7000
-120
7500
-70
-20
8000
8500
+30
9000
+80
+130
9500
+180
10000
+230
2.0
1.0
0.0
0.43
-1.0
0.85
0.19
-1.42
-2.0
-3.0
-4.0
-5.0
-2.76
-3.36
-4.59
-4.19
-6.0
-6.85
-7.0
-8.0
-190
-140
-90
-40
10
60
110
160
210
Promedio (7000-9000)
95
10- ) Variación de la posición de la unión con respecto al mejor largo obtenido
en el ensayo anterior.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
+80
orig , +2.9
secundario
orig
orig
terciario
orig
orig
Moviendo la union
8.0
6.0
4.0
2.0
0.0
-2.0
-4.0
-6.0
6000
6500
7000
25%
7500
35%
8000
45%
8500
9000
55%
9500
65%
10000
75%
1.4
1.2
1.17
1.12
1.0
0.93
0.8
0.66
0.6
0.4
0.39
0.24
0.2
0.0
20
30
40
50
60
70
80
Promedio (7000-9000)
96
11- ) Variación del largo del primario progresivo con diámetros +2.9mm ,
+5.8mm con respe cto al original. La unión del primario progresivo se encuentra en
la mitad de su largo.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
variable(50%) +2.9 , +5.8
secundario
orig
orig
terciario
orig
orig
15.0
10.0
5.0
0.0
-5.0
-10.0
-15.0
-20.0
-25.0
6000
6500
-170
7000
-120
7500
-70
-20
8000
8500
+30
9000
+80
+130
9500
+180
10000
+230
3.0
2.0
1.60
2.00
1.0
0.35
0.31
0.0
-1.0
-2.0
-2.24
-2.98
-3.0
-4.0
-5.0
-6.0
-190
-4.17
-5.26
-140
-5.00
-90
-40
10
60
110
160
210
Promedio (7000-9000)
97
12- ) Variación del largo del primario progresivo con diámetros orig , +2.9 ,
+5.8mm con respecto al original. Las uniones del primario progresivo se
encuent ran en 1/3 y 2/3 de su largo.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
variable(33%) orig , +2.9 , +5.8
secundario
orig
orig
terciario
orig
orig
15.0
10.0
5.0
0.0
-5.0
-10.0
-15.0
-20.0
-25.0
6000
6500
-170
7000
-120
7500
-70
8000
-20
8500
+30
9000
+80
9500
+130
+180
10000
+230
2.0
1.44
1.56
1.0
0.27
0.0
-0.36
-1.0
-2.0
-2.36
-3.0
-4.0
-5.0
-190
-2.74
-3.41
-4.61
-140
-4.39
-90
-40
10
60
110
160
210
Promedio (7000-9000)
98
13- ) Variación de la posición de una unión fijando la otra, con respecto al
mejor largo obtenido en el ensayo anterior.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
+100
orig , +2.9 , +5.8
secundario
orig
orig
terciario
orig
orig
1
20%-32%-48%
2
20%-40%-40%
3
20%-48%-32%
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
6000
6500
7000
7500
8000
1
2
8500
9000
9500
10000
3
1.6
1.55
1.5
1.5
1.5
1.5
1.5
1.45
1.4
1.42
1.4
1.4
0.5
1
1.5
2
2.5
3
3.5
Promedio (7000-9000)
99
14- ) Variación de la posición de una unión fijando la otra con respecto al
mejor largo obtenido en el ensayo anterior.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
+100
orig , +2.9 , +5.8
secundario
orig
orig
terciario
orig
orig
1
26%-32%-43%
2
26%-37%-37%
3
26%-43%-32%
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
6000
6500
7000
7500
8000
1
2
8500
9000
9500
10000
3
1.8
1.75
1.7
1.7
1.7
1.7
1.7
1.65
1.6
1.6
1.61
1.6
0.5
1
1.5
2
2.5
3
3.5
Promedio (7000-9000)
100
15- ) Variación de la posición de una unión fijando la otra con respecto al
mejor largo obtenido en el ensayo anterior.
ESPECIFICACIONES
Tubo
Largo
Diametro
primario
+100
orig , +2.9 , +5.8
secundario
orig
orig
terciario
orig
orig
1
32%-26%-42%
2
32%-34%-34%
3
32%-42%-26%
5.0
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
6000
6500
7000
7500
8000
1
1.7
1.7
1.7
1.7
1.7
1.7
1.7
1.7
1.6
1.6
1.6
1.6
8500
2
9000
9500
10000
3
1.71
1.65
1.62
0
0.5
1
1.5
2
2.5
3
3.5
Promedio (7000-9000)
101
Con todos los ensayos realizados (mas de 100 configuraciones de múltiples de
escapes diferentes) obtuvimos buenos resultados con diámetros de primario mayores a
los actuales, incluso con múltiples progresivos. La mejor configuración fue la de un
múltiple progresivo de 2 diámetros 48.8-51.7 con un largo de aproximadamente 100mm
más que el original. Esta configuración permite mejorar el motor en alrededor de 2 HP
en el promedio de potencia, lo cual es muy importante debido a la dificultad de ganar
potencia en un motor con tantos años de desarrollo.
Cabe destacar que los diámetros ensayados (salvo el de 51.7) son todos tubos
standard, de no ser así, la fabricación del escape seria imposible. El tubo de 51.7 es
posible hacerlo fuera de lo standard porque es la ultima parte del primario, que es recta,
y permite rolar una chapa para conformarlo.
102
5.2.- MOTOR 4 CILINDRO
5.2.1 Calibración
Para la calibración de este motor se utilizo una estrategia similar a la del motor 6
cilindros, presentado en el punto anterior. Concretamente para esta etapa se dispuso de
los mismos datos, salvo el caudal de aire consumido por el motor, con lo cual la
aproximación de los coeficientes de descarga en las válvulas fue un poco más
dificultosa.
Por otro lado, se contó con curvas de ensayos realizados en el dinamómetro, en
donde se evaluaba la performance de algunos elementos, con lo cual se tuvo una
información muy valiosa para contrastar y calibrar el simulador mirando las reacciones
de este frente a los mismos cambios.
La figura 5-28 muestra las curvas extraídas del dinamómetro con los cambios
propuestos, en donde se observan cambios francos de una curva a otra, lo cual es muy
importante para calibrar el simulador, porque nos permite evaluar no solo una curva,
sino las tendencias frente a cambios.
Cada una de las 3 curvas representa el ensayo realizado con las siguientes
configuraciones:
•
•
•
Prueba 8: se toma como curva original con diámetro del conducto de admisión
de 48 mm.
Prueba 4: se modifica el diámetro del conducto de admisión que pasa a ser de
45mm
Prueba 5: se retrasa el árbol de levas de admisión 7º y se mantiene el diámetro
del conducto de admisión en 45mm
Curvas Potencia Real Banco Pruevas
280
260
240
prueva 8
prueva 5
220
HP
prueva 4
200
180
160
140
5250
5500
5750
6000
6250
6500
6750
RPM
7000
7250
7500
7750
8000
Figura 5-28: curva de potencia para distintas configuraciones del motor
103
Estos mismos cambios fueron ensayados en el simulador y utilizados para su
calibración. Como podemos ver en las figuras 5-29, 5-30 y 5-31 las tendencias
alcanzada son buenas, lo cual indica que el simulador repite las tendencias del motor y
podemos decir que esta calibrado.
280
260
240
prueva 8
220
HP
L83
200
180
160
140
5250
5500
5750
6000
6250
6500 6750
RPM
7000
7250
7500
7750
8000
7750
8000
Figura 5-29: compa ración entre la curva real y la simulada
280
260
240
prueva 4
220
HP
L93
200
180
160
140
5250
5500
5750
6000
6250
6500 6750
RPM
7000
7250
7500
Figura 5-30: comparación entre la curva real y la simulada
104
280
260
240
prueva 5
220
HP
L103
200
180
160
140
5250
5500
5750
6000
6250
6500 6750
RPM
7000
7250
7500
7750
8000
Figura 5-31: comparación entre la curva real y la simulada
5.2.2 Optimización del múltiple de admisión, escape y árbol de levas
Para la optimización de los múltiples y el árbol de levas, por una cuestión tiempos y
debido a que este motor, a diferencia del 6 cilindros ensayado entes, presenta un
configuración en donde los cilindros interactúan entre si solo a través de la toma
dinámica y de uniones en el múltiple de escape (el sistema de admisión es mas
independiente entre cilindros) se realizo una primera aproximación considerando al
motor como monoclindrico, para posteriormente tomar los mejores resultados logrados
de esta forma y ensayarlos ya en una configuración pluricilindrica, como realmente lo
es.
En la figura 5-32 se observan los primeros ensayos trabajando sobre el reglaje de
válvulas, alzada, diámetros de admisión y diámetros de tubos primarios de escape.
Debido al corto tiempo que demora una simulación monocilindrica (aproximadamente 5
minutos) se pudieron realizar una gran cantidad de pruebas de distintas configuraciones,
para luego quedarse con la mejor.
Con las mejores de estas curvas, se paso a la configuración pluricilindrica, donde se
comprobó que la tendencia de las curvas es muy similar en monocilindrico que en
pluricilindrico, lo cual demuestra que esta estrategia de aproximación rápida ahorra
mucho tiempo de simulación y el resultado obtenido es muy bueno.
En la figura 5-33 se muestran las curvas de los mejores resultados arrojados por el
monocilindrico ensayados como pluricilindrico. A continuación se detallan las
características de la configuración original del motor junto con la de cada ensayo:
105
Configuración original
Diámetro boca trompeta Adm ---------------------- 56mm
Diámetro conducto Adm ---------------------------- 48mm
Alzada máx. Adm. ------------------------------------ 13.3mm
Alzada máx. Esc. ------------------------------------- 11.8mm
AAA ----------------------------------------------------- 54º
RCA ----------------------------------------------------- 72º
AAE ----------------------------------------------------- 82º
RCE ----------------------------------------------------- 54º
Permanencia Adm. ------------------------------------ 306º
Permanencia Esc. ------------------------------------- 316º
Cambios propuestos
•
Ensayo1: igual al original, cambia la permanencia de las levas de admisión
y escape a 300º y la alzada = 14.2mm
•
Ensayo2: igual al ensayo1, cambia el diámetro de admisión a 45mm
•
Ensayo3: igual al ensayo2, cambia el diámetro de escape primario a 46mm
•
Ensayo4: igual al ensayo3, cambia la alzada pasa a 13.3mm
•
Ensayo5: Diámetro de admisión .45mm; diámetro de escape 48mm; leva de
admisión 295º; leva de escape 300º
•
Ensayo6: diámetro de admisión 45mm; diámetro de escape 46mm; leva de
admisión 295º; leva de escape 300º
Después de realizar los ensayos detallados mas arriba, obtuvimos en el ensayo6 la
mejor configuración en cuanto a potencia, que es el objetivo de un motor de
competición. Las características de la mejor de las configuraciones son las que se
detallan abajo:
Configuración final
Diámetro boca trompeta Adm ---------------------- 56mm
Diámetro conducto Adm ---------------------------- 45mm
Alzada máx. Adm. ------------------------------------ 14.2mm
Alzada máx. Esc. ------------------------------------- 13.5mm
AAA ----------------------------------------------------- 49º
RCA ----------------------------------------------------- 66º
AAE ----------------------------------------------------- 71º
RCE ----------------------------------------------------- 49º
106
Permanencia Adm. ------------------------------------ 295º
Permanencia Esc. ------------------------------------- 300º
Comparacion Monocilindrico
%
12.0
10.5
9.0
7.5
6.0
4.5
3.0
1.5
0.0
-1.5
-3.0
-4.5
-6.0
-7.5
Ens4Mono0
Ens4Mono1
Ens4Mono2
Ens4Mono3
Ens4Mono4
Ens4Mono5
Ens4Mono6
Ens4Mono7
Ens4Mono8
Ens4Mono9
Ens4Mono10
5500
5750
6000
6250
6500
6750
7000
7250
7500
7750
8000
Ens4Mono11
RPM
Figura 5-32: ensayos sobre la configuración monocilindrica
Comparacion Pluricilindrico
12.0
10.5
9.0
7.5
EnsOrig
6.0
4.5
Ensayo1
Ensayo2
3.0
1.5
%
Ensayo3
0.0
-1.5
Ensayo4
-3.0
-4.5
Ensayo6
Ensayo5
-6.0
5500
5750
6000
6250
6500
6750
7000
7250
7500
7750
8000
RPM
Figura 33: ensayos sobre la configuración pluricilindrica
107
5.2.3 Optimización de la leva de admisión
En esta etapa lo que se persigue es determinar cual es el perfil optimo de la leva de
admisión, tomando como base la leva que actualmente esta en el motor. Cada uno de los
ensayos están detallados debajo junto con los gráficos de resultados. Cabe destacar que
en todos los ensayos hechos en esta etapa, el único cambio es el perfil de la leva de
admisión, quedando el resto de los datos invariables.
El ensayo “Ag2Ek312” fue tomado como referencia y el resto son comparados
contra este.
Comparacion Pluricilindrico
6.0
5.0
4.0
Ag2Ek312
3.0
Ag2Eg4
2.0
Ag4Eg4
1.0
%
Eg4Eg4
ANewEg4
0.0
-1.0
-2.0
5500
5750
6000
6250
6500
6750 7000
7250
7500
7750 8000
8250
RPM
Figura 5-34: ensayos sobre la configuración pluricilindrica
Cambios propuestos en la leva de admisión
•
Ensayo Ag2Eg4: Adm. G2 (alz.:13.3mm) -
•
Ensayo Ag4Eg4: Adm. G4 (alz.:13.65mm) - Esc. G4 (alz.:13.15mm)
•
Ensayo Eg4Eg4: Adm. G4 (alz.:13.15mm)
•
Ensayo ANewEg4: Adm. ANew (alz.:13.65mm) - Esc. G4 (alz.:13.15mm)
Esc. G4 (alz.:13.15mm)
- Esc. G4 (alz.:13.15mm)
La leva ‘Anew’ señalada arriba es igual a la leva G4 de escape, pero con una
alzada mayor.
108
14
12
10
8
6
4
2
0
0
50
100
150
200
250
300
Figura 5-35: modificación del perfil de la leva de admisión (‘Anew’ azul – G4
escape)
5.2.4 Influencia del incremento de la temperatura ambiente
En esta etapa se busca cuantificar la influencia del incremento de temperatura
ambiente y distintos diámetros de conductos de admisión sobre el rendimiento
volumétrico
Para el siguiente ensayo se utilizo la configuración con las levas de admisión y
escape G4.
HP
Potencia
300
290
280
270
260
250
240
230
220
210
200
190
180
170
5250
5500
5750
6000
6250
6500
6750
7000
7250
7500
7750
8000
8250
8500
RPM
10ºc d=48
30ºc d=48
50ºc d=48
Figura 5-36: Conductos de admisión diámetro 48mm y variación de temperatura
10ºc, 30ºc y 50ºc
109
En la figura 5-36, se observa una disminución de potencia casi constante de 3 hp de
la curva (azul) con temperatura de admisión de 30ºc a la de 50ºc (magenta). Y una
disminución de 2 hp de la curva (amarilla) de 10ºc a la de 30ºc (azul) salvo a 6750 rpm
donde pierde la tendencia.
En las figuras 5-37, 5-38 y 5-39, se ensayo para cada diámetro de múltiple de
admisión (46, 48 y 50mm) las diferentes temperaturas ambientes posibles.
Variación Potencia respecto adm:48mm temp:10ºc
8
6
4
2
HP
0
-2
-4
-6
5250
5500
5750
6000
6250
6500
6750
7000
7250
7500
7750
8000
8250
8500
RPM
10ºc d=46
10ºc d=48
10ºc d=50
Figura 5-37: Conductos de admisión diámetro 46mm-48mm-50mm y de
temperatura 10ºc
Variación Potencia respecto adm:48mm temp:30ºc
8
6
4
2
HP
0
-2
-4
-6
-8
-10
5250
5500
5750
6000
6250
6500
6750
7000
7250
7500
7750
8000
8250
8500
RPM
30ºc d=48
30ºc d=50
30ºc d=46
Figura 5-38: Conductos de admisión diámetro 46mm-48mm-50mm y de
temperatura 30ºc
110
Variación Potencia respecto adm:48mm temp:50ºc
6
4
2
0
HP
-2
-4
-6
-8
-10
5250
5500
5750
6000
6250
6500
6750
7000
7250
7500
7750
8000
8250
8500
RPM
50ºc d=48
50ºc d=46
50ºc d=50
Figura 5-39: Conductos de admisión diámetro 46mm-48mm-50mm y de
temperatura 50ºc
Se encuentra el mismo efecto alrededor de las 6750 rpm en todas las graficas con el
tubo de diámetro 46mm (figura 5-40) y la caída se acentúa con la temperatura de
admisión de 50ºc (aprox. 9 hp), observando un aumento de la temperatura de los gases
de escapes de mas de 100ºc entre 6500 y 7100 rpm. Hay que tener en cuenta que los
ensayos se hicieron con la relación aire combustible y el avance de encendido fijos,
parámetros que en el motor real son variables, pudiendo suavizar estos efectos.
Potencia
265
260
255
HP
250
245
240
235
230
225
220
6100
6200
6300
6400
6500
6600
6700
6800
6900
7000
7100
7200
7300
RPM
10ºCd46
10ºCd48
10ºCd50
Figura 5-40: Conductos de admisión diámetro 46mm-48mm-50mm y de
temperatura 10ºc
111
CONCLUSIONES
A lo largo de este proyecto se logro obtener una herramienta de diseño de última
generación en lo que hace al desarrollo de motores de combustión interna capaz de
simular el comportamiento fluidodinámico que se sucede dentro del motor. Si bien se
realizan en el calculo algunas simplificación, la importancia de este tipo de estrategia
radica en el hecho que resuelve una cantidad de variables interrelacionadas imposibles
de analizar de otra forma.
El software desarrollado puede ser utilizado para múltiples propósitos, tanto para el
diseñador que se encuentra en la etapa de proyecto, como para un preparador de
motores de competición que tiene como objetivo mejorar sus elementos en busca de
mayor potencia.
En cuanto a futuras líneas de trabajos en esta área, la tendencia en el mundo es
acoplar este tipo de simuladores unidimensionales con modelos tridimensionales
parciales para resolver elementos que posean formas geométricas complicadas (uniones,
válvulas, toma dinámica, etc.). Esto permitiría hacer al simulador aun más
independiente de ajustes empíricos o mediciones necesarias actualmente. Otra de las
líneas de trabajo es hacer un modelo combustión mas autosuficiente, que, como se dijo
mas arriba, no requiera de ingresar datos extraídos experimentalmente, lo que le
confiere a la simulación mayor atracción aun.
112
BIBLIOGRAFIA
1- A. Cardona, E. Lens y N. Nigro. “Optimal Design of Cams”. Centro
Internacional de Metodos Computacionales en Ingeniería (CIMEC-INTEC)
2- John B. Heywood. “Internal Combustión Engine Fundamentals ”. Mc Graw Hill
Inc.
3- Gordon P. Blair. “Design and Simulation of Four-Stroke Engines”. SAE
Internacional.
4- DE Winterbone y RJ Pearson. “Design Techniques for Engine Manifolds”. SAE
Internacional.
5- Giocomo Augusto Pignone y Ugo Romolo Vercelli. “Motori ad Alta Potenza
Specifica”. Giorgio Nada Editore
6- N. Nigro, M. Storti y L. Ambroggi. “Modelización numérica de un motor de
combustión interna monocilindrico encendido por chispa”. Grupo de Tecnología
Mecanica del INTEC-CONICET.
7- J. M. Corberan. “A new constant pressure model for N-branch junctions”.
Departamento Termodinámica Aplicada, Universidad Politecnica de Valencia,
Spain.
8- T. W. Asmus. “Valve Events and Engine Operation”. Chrysler Corp.
9- Arturo de Risi, Raffaele Secca y Domenico Laforgia. “Optimization of a Four
Stroke Engine by Means of Experimental and 1-D Numerical Analysis”.
Universitá de Lecce, Dipartamento di Ingegneria dell’Innovazione, Via
Arnesano, Italy
10- Robert L. Norton. “Diseño de Maquinaria”. Mc. Graw Hill
113
AGRADECIMIENTOS
Queremos agradecerles a las personas que colaboraron en este proyecto de forma
desinteresada, brindándonos toda su experiencia que para nosotros tuvo un valor
fundamental. Entre ellas se encuentran: Sr. Pablo Satriano, quien nos abrió las puertas
de su taller de una manera poco habitual en el ambiente de la competición y nos brido
todos sus conocimientos sobre automovilismo deportivo, al Ing. Leonardo Ambroggi,
quien fue el precursor de esta línea de trabajo y nos brindo todo su apoyo y a todo el
grupo de personas que trabajan en el CIMEC por permitirnos trabajar a su lado.
Queremos hacer un agradecimiento muy especial a nuestro director del proyecto,
Dr. Norberto Nigro, el cual además de aportar sus invalorables conocimientos técnicosmatemáticos, se comprometió con el proyecto de una manera excepcional, incluso mas
de lo que le correspondía por ser nuestro director. A el todo nuestro agradecimiento.
De las demás personas que nos apoyaron no mencionaremos nombres, ya que
olvidarnos de algunas de ellas sería imperdonable.
114
 0
0
Anuncio
Documentos relacionados
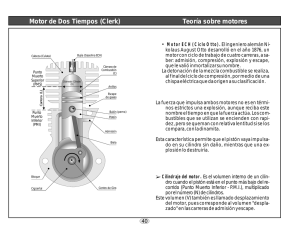
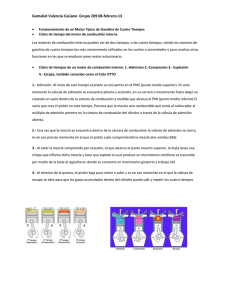
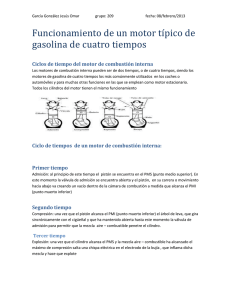


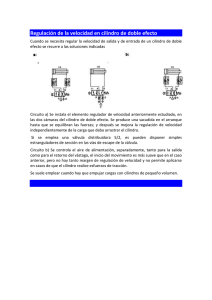

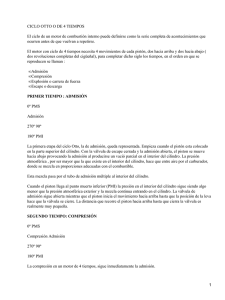
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados