2079992 . A2
Anuncio

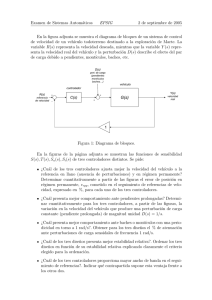
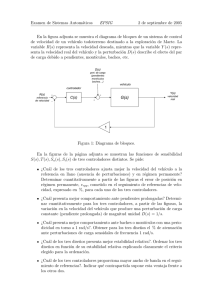
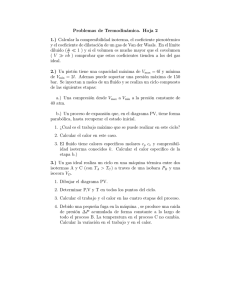
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS k 21 6 51 ESPAÑA 12 k ES 2 079 992 kNúmero de solicitud: 9200627 kInt. Cl. : B60S 3/04 11 N.◦ de publicación: SOLICITUD DE PATENTE k 71 Solicitante/s: Juan Narciso López Salinas k 72 Inventor/es: López Salinas, Juan Narciso k 74 Agente: No consta 22 Fecha de presentación: 25.02.92 43 Fecha de publicación de la solicitud: 16.01.96 43 Fecha de publicación del folleto de la solicitud: 16.01.96 A2 k C/ Mayor, n◦ 28-2◦ 30158 Los Garres, Murcia, ES k k k kResumen: 54 Tı́tulo: Sistema de automatización del prelavado, lavado o desparafinado de vehı́culos a alta presión. ES 2 079 992 A2 57 Sistema de automatización del prelavado, lavado o desparafinado de vehı́culos a alta presión. Se trata de una estructura en forma de puente (1) donde se suspende un bastidor (2) con movimiento vertical, que mediante un eje móvil (3) sujeta un módulo (4) con movimiento de ±45◦ con respecto al bastidor. De la parte baja del módulo sale un brazo (5) terminado en boquilla (9), que dibujando un movimiento en espiral proyecta el agua a alta presión sobre el frontal, capó, techo, trasera y partes altas de los laterales del vehı́culo. En ambos lados de la estructura e interiormente salen otros brazos (7) terminados en boquillas (9) que con un movimiento de rotación proyectan el agua a alta presión sobre laterales, faldones y ruedas del vehı́culo. El sistema puede adaptarse a instalaciones fijas o móviles dependiendo tan solo de la variación del programa y la incorporación del conjunto transmisión-ruedas de traslación. Venta de fascı́culos: Oficina Española de Patentes y Marcas. C/Panamá, 1 – 28036 Madrid 1 ES 2 079 992 A2 DESCRIPCION La presente memoria descriptiva y los dibujos complementarios que la acompañan se refieren a “Un sistema de automatización del prelavado, lavado o desparafinado de vehı́culos a alta presión” para la que se solicita el privilegio de explotación industrial y comercial en exclusiva en el territorio nacional, como consecuencia del presente registro de “Patente de Invención” a la que se acoge. Para una mejor compresión de la invención se describe brevemente el actual proceso de prelavado manual. Actualmente y con una implantación cada dı́a mayor en las instalaciones de lavado automáticas por rodillos de cepillos, tanto en instalaciones fijas, consistentes en una cadena sin fin que desplaza al vehı́culo por un túnel de lavado, o bien móviles en los cuales el vehı́culo permanece quieto y es la instalación en forma de pórtico o puente la que se desplaza sobre el vehı́culo, antes de que el vehı́culo entre en contacto con los cepillos hay una fase de prelavado que consiste en que un operario utilizando una lanzadera de agua a presión elimina parte de la tierra o arenilla que el vehı́culo pueda llevar. Esta operación se realiza sobre el frontal, laterales, faldones, trasera y parte superior del vehı́culo. La finalidad de este prelavada es evitar que cuando el vehı́culo llegue a los cepillos existan partı́culas de tierra o arenilla que por su tamaño pudieran deteriorar la pintura del vehı́culo a lavar. Este sistema de prelavado manual es eficaz porque elimina el riesgo de deterioro del vehı́culo, pero también se puede caracterizar por: - Lento, porque interrumpe o paraliza la continuidad de la cadena de lavados. - Costoso, porque requiere la presencia de uno o varios operarios. - Insalubre, porque somete continuamente a los operarios a la neblina de agua y productos quı́micos. Tras esta breve descripción del prelavado manual, queda definida la función a realizar del “SISTEMA DE AUTOMATIZACION DEL PRELAVADO, LAVADO O DESPARAFINADO DE VEHICULOS A ALTA PRESION” a describir, ası́ como la eficacia a imitar y las caracterı́sticas a mejorar. El invento consiste en una estructura en forma de puente, de la cual se suspende en paralelo y en un plano horizontal, un bastidor con movimiento vertical, que por mediación de un eje móvil sujeta un módulo central, con un movimiento de ± 45◦ con respecto al bastidor. De la parte inferior de dicho módulo, sale un brazo terminado en una boquilla, que será la encargada de dar salida al agua a alta presión. Esta boquilla consta de un movimiento de traslación y de un movimiento de rotación. Estos dos movimientos, al ser simultáneos, producen en la boquilla un efecto de movimiento en espiral, proyectando el agua a presión de izquierda a derecha y viceversa sobre el vehı́culo. De las columnas verticales de la estructura e interiormente salen sendos brazos, terminados en unas boquillas, que mediante un movimiento de 2 5 10 15 20 25 30 35 40 45 50 55 60 65 2 rotación actúan sobre los laterales del vehı́culo, proyectándole el agua a alta presión. En la parte inferior de la estructura, según el invento sea para una instalación móvil o fija, llevarı́a ruedas o un sistema convencional de anclaje al suelo. La columna izquierda de la estructura vertical aloja de arriba a abajo los siguientes componentes: centralita neumática, cuadro eléctrico, motobomba a alta presión brazo izquierdo, conjunto moto-reductor brazo izquierdo, y en su parte inferior para instalaciones móviles el conjunto transmisión-ruedas de traslación. La columna derecha de la estructura vertical aloja de arriba a abajo los siguientes componentes: un pequeño depósito de agua para regulación y alimentación de las moto-bombas, motobomba de alta presión brazo central, moto-bomba de alta presión brazo derecho, y en la parte inferior para instalaciones móviles el conjunto transmisión-ruedas de traslación. El sistema de trabajo será el siguiente: una vez iniciado el ciclo, el módulo horizontal hará un giro de +45◦ con respecto al eje móvil de sujeción, activando el movimiento de traslación y rotación del brazo y la moto -bomba del agua, iniciándose el prelavado, lavado o desparafinado del frontal del vehı́culo. A medida que el módulo central va elevándose y perdiendo el frente del vehı́culo, adquiere la posición de giro de 0◦ con respecto al eje, para ası́ actuar sobre el capó y el techo del vehı́culo. Posteriormente da otro giro de -45◦, para actuar sobre la parte trasera del vehı́culo a la vez que desciende a su posición inicial. Una vez en posición inicial cesarán los movimientos de dicho brazo, ası́ como la salida de agua. Al inicial del ciclo se activarı́an el movimiento de rotación ası́ como la puesta en marcha de las moto-bombas de los brazos verticales. Transcurrido un tiempo, y una vez que el vehı́culo está fuera de la zona de acción de los brazos, éstos y sus bombas se pararán. Todos los movimientos y maniobras del sistema están dirigidos por mediación de un autómata programable industrial, provisto de temporizadores, contadores y descontadores que actúan según el programa y la lectura de los detectores, que convenientemente situados leerı́an la silueta del vehı́culo. El invento está pensado para adaptarlo a cualquier sistema de lavado por rodillos, bien sea instalación fija o instalación móvil, como prelavado. También, y por sı́ sola puede utilizarse como lavado de vehı́culos a alta presión e incluso para el desparafinado de vehı́culos a alta presión. El que se pueda utilizar para uno u otro fin tan solo depende de la variación del programa del autómata y la incorporación, o no, del conjunto transmisión-ruedas de traslación. El sistema de automatización del prelavado, lavado o desparafinado de vehı́culos a alta presión es eficaz, ya que elimina la tierra y arenilla que frotada por los cepillos puede dañar al vehı́culo, no interrumpe el ciclo de lavado, ni necesita la presencia de operarios, proyectando y racionalizando el agua más homogéneamente que el sistema manual de prelavado, lavado o desparafi- 3 ES 2 079 992 A2 nado a alta presión. Para una mejor y amplia explicación de las caracterı́sticas anteriormente expuestas se acompañan unas páginas con dibujos informativos, que designados como figuras llevan unas acotaciones numéricas que nos facilitarán la localización de los componentes en referencia, y que son los siguientes: 1.- Estructura en forma de puente. 2.- Bastidor. 3.- Eje móvil. 4.- Módulo central. 5.- Brazo central. 6.- Columnas verticales. 7.- Brazos verticales. 8.- Ruedas de traslación. 9.- Boquillas de salida de agua a presión. 10.- Guı́as del bastidor. 11.- Carril para las ruedas. 12.- Cilindro neumático. 13.- Soporte cilindro neumático y piñones. 14.- Piñones del extremo del vástago. 15.- Piñones guı́a. 16.- Cadenas. 17.- Sujeción de las cadenas a la estructura. 18.- Soporte en forma de triángulo. 19.- Células foto-eléctricas. 20.- Cilindro neumático para movimiento ± 45◦ . 21.- Soporte de la base del cilindro. 22.- Soporte rótulo del vástago del cilindro. 23.- Soporte de bancada conjunto moto-reductorbrazo. 24.- Moto-reductor. 25.- Eje moto-reductor. 26.- Soporte portacojinetes. 27.- Transmisión del moto-reductor al eje del brazo. 28.- Soporte enlace giratorio. 29.- Transmisión-ruedas de traslación. 30.- Cadena doble sin fin. 31.- Rodillo giratorio. 32.- Piñón doble de giro libre. 33.- Piñón triple. 34.- Transmisión piñón triple moto-reductor. 35.- Moto-reductor. 36.- Carro soporte. 37.- Enlace giratorio brazo central. 38.- Donde se une la manguera de agua con 37. 39.- Soporte de donde tira el rodillo. 40.- Eslabón que está unido con el rodillo girato rio. 41.- Dirección del eslabón cuando va por debajo. 42.- Dirección del eslabón cuando va por arriba. 43.- Cadenas guı́a fijas en sus extremos al módulo. 44.- Piñones anti-retorno. Página n◦ 14: Aspecto general del sistema: Figura I: Representa una vista frontal de la estructura donde las acotaciones serı́an: (1) estructura en forma de puente; (2) bastidor; (3) eje móvil; (4) módulo central; (5) brazo central; (6) columnas verticales; (7) brazos verticales; (8) ruedas de traslación de la estructura; (9) boquillas de salida de agua a presión; (10) guı́as del bastidor; (11) carriles guı́a. Figura II y III: Representa una vista frontal de las caras interiores de la estructura; (6) columnas verticales; (7) brazos verticales; (8) ruedas de traslación de la estructura; (10) guı́as del basti- 5 10 15 20 25 30 35 40 45 50 55 60 65 4 dor. Página n◦ 15: La figura IV representa una vista frontal del módulo central y sus sistemas de movimiento. La figura V representa una vista lateral de derecha a izquierda del bastidor del módulo central. El movimiento vertical del módulo central (4), se realiza por mediación de un cilindro neumático (12), que va fijado al techo de la estructura por un soporte (13), y que en el extremo de su vástago va provisto de dos piñones (14), que con la ayuda de otros piñones guı́a (15), conducen el extremo de unas cadenas (16), a la parte superior de los perfiles verticales del bastidor (2), donde quedan fijadas. El otro extremo de las cadenas se sujeta a la estructura (17). En la parte inferior de los perfiles verticales del bastidor se fijan unos soportes (18) en forma de triángulo, en cuyos vértices se colocan tres juegos de células foto-eléctricas (19), que conexionadas adecuadamente a través de un autómata programable, y por mediación de los elementos de mando convencionales del cilindro, hacen posible que el módulo central dibuje la silueta del vehı́culo, elevándose o bajándose según lo requiera la altura de éste. El movimiento de ±45◦ del módulo central (4) con respecto al bastidor (2), se realiza por mediación de un cilindro neumático (20), cuya base se sujeta a un soporte (21), fijo al bastidor (2). El extremo de su vástago se fija mediante una rótula a otro soporte (22), fijo a la esquina superior del módulo (4). Al estar el cilindro sin aire en sus cámaras, el módulo por su propio peso permanecerá en vertical, y el vástago del cilindro a mitad de carrera, dándonos ası́ la posición de 0◦ con respecto al bastidor. Al entrar el aire a una u otra cámara del cilindro nos dará las posiciones de ±45◦ con respecto al bastidor. Página n◦ 16: Representa el conjunto motoreductor brazos verticales y conjunto transmisiónruedas de traslación para instalaciones móviles, siendo la figura VI una vista en planta, la figura VII una vista de frente y la figura VIII una vista a la izquierda del corte A-B. El conjunto moto-reductor brazo vertical, está formado por un soporte bancada (23) colocado horizontalmente, donde se sujeta un motoreductor (24), cuyo eje (25) es perpendicular a la cara interior de la estructura. En paralelo a este eje se coloca un soporte compuesto por dos portacojinetes (26), cuyos cojinetes serán los encargados de sujetar el brazo giratorio (7), formado por un tubo en forma de cuatro terminado en una boquilla (9). Mediante una transmisión convencional (27) se transmite la rotación del eje del moto-reductor al brazo giratorio. Junto al soporte del brazo y en lı́nea con él, se coloca otro soporte (28), donde se fija el enlace giratorio, que une la manguera del agua a presión con el brazo giratorio. Para instalaciones móviles, la traslación de la estructura se realiza mediante unas ruedas (8), dos en cada pata, una de giro libre y otra unida por su eje y mediante una transmisión convencional (29), al moto -reductor del brazo vertical, que hacen posible el desplazamiento de la estructura 3 5 ES 2 079 992 A2 por unos carriles guı́a (11). Página n◦ 17: Se refiere al movimiento del brazo del módulo central. En la figura IX se representa una vista de planta del módulo, la figura X una vista frontal, y las figuras XI y XII que representan una vista a la izquierda y a la derecha del corte según A-B. El movimiento de traslación del brazo (5), del módulo central se efectúa mediante una cadena doble sin fin (30), que en uno de sus eslabones va unida a un rodillo giratorio (31). Esta cadena se coloca en un lado del módulo, guiada por dos piñones, cuyos ejes están sujetos a la estructura del módulo de forma convencional, de los cuales uno doble gira libre (32) y el otro triple (33), va unido por una transmisión (34) al eje de un moto -reductor (35) sujeto al módulo. El rodillo giratorio (31) es el encargado de desplazar el carro (36), que cuenta con un sistema de deslizamiento convencional y donde se fija el enlace giratorio (37) que une (38) la manguera de agua a presión con el brazo, formado por un tubo con forma de cuatro y acabando en boquilla (9). El tiro lo realiza a través de un soporte en forma de puente (39), que está sujeto al carro, por el centro del cual se desplaza verticalmente el rodillo, coincidiendo con la subida y bajada o viceversa del eslabón soporte (40), de la parte baja a la parte alta o viceversa del piñón. Horizontalmente le transfiere al carro un movimiento de traslación, con dirección izquierda a derecha o de- 5 10 15 20 25 30 35 40 45 50 55 60 65 4 6 recha a izquierda, dependiendo de la dirección del eslabón soporte, que irá, bien por debajo (41) o bien por encima (42) de los piñones, según se aleje o acerque a uno de éstos (32). Al tener las cadenas sin fin una rotación continua en el mismo sentido de giro, se transfiere al brazo en una traslación alternativa izquierdaderecha, derecha-izquierda, mientras el motoreductor que mueve la cadena sin fin esté en marcha. El movimiento de rotación del brazo del módulo central (5), se realiza por mediación de dos cadenas (43), fijas en sus extremos a la estructura del módulo, una frente a la otra y a diferente altura, que sirven de guı́a cada una de ellas a un piñón anti-retroceso (44), cuyo eje (5) es el brazo en forma de cuatro. La caracterı́stica de estos piñones es que en un sentido giran libres a su eje y en el contrario giran moviendo el eje. Estos piñones se colocan de forma que al desplazarse de izquierda a derecha, gire uno de ellos, transmitiendo la rotación al eje, y de derecha a izquierda gire el otro, transmitiendo la rotación al eje en el mismo sentido que el anterior. Como el movimiento de rotación se produce a consecuencia del movimiento de traslación y mientras éste dure, la boquilla en que termina el brazo en forma de cuatro para expulsar el agua a presión, describirá un movimiento en forma de espiral, que irá de izquierda a derecha y de derecha a izquierda sobre el vehı́culo. 7 ES 2 079 992 A2 REIVINDICACIONES 1. Sistema de automatización del prelavado, lavado o desparafinado de vehı́culos a alta presión, caracterizado por incorporar dentro de la estructura en forma de puente, las moto-bombas de agua a presión, y conjuntos moto -reductores brazos verticales. 2. Un sistema según reivindicaciones 1, caracterizado por contar con una boquilla central, encargada de proyectar el agua a presión sobre el frontal, capó, techo, trasera y partes altas de los laterales del vehı́culo, con un movimiento de traslación y rotación que simultáneamente dibujan un movimiento en espiral, producido por tan solo un moto-reductor y dos piñones anti-retroceso sobre unas cadenas. 5 10 15 8 3. Un sistema según reivindicaciones 1 y 2, caracterizado por tener dos brazos verticales terminados en boquilla con un movimiento de rotación, producido por un moto-reductor que sin pasar el agua por el eje de éste, proyecta el agua a presión sobre los laterales, dibujando una espiral a todo lo largo del vehı́culo, ya que entre éste y la estructura existe un movimiento de traslación. 4. Un sistema según reivindicaciones 1 a 3, caracterizado por poder adaptarse a cualquier instalación de lavado, o bien utilizar el sistema por sı́ solo para el lavado o desparafinado de vehı́culos, dependiendo tan solo del cambio del programa y de la incorporación de las ruedas de traslación, que son movidas a través de unos carriles guı́a por los mismos moto-reductores que mueven los brazo verticales. 20 25 30 35 40 45 50 55 60 65 5 ES 2 079 992 A2 6 ES 2 079 992 A2 7 ES 2 079 992 A2 8 ES 2 079 992 A2 9