Document
Anuncio

Teoría de Representaciones
Dr. J. Javier Campo Ruiz
Instituto de Ciencia de Materiales de Aragón
Contenidos
Elementos de Teoría de Simetría
Introducción
El papel de la simetría
Conceptos de simetría via teoría de
Grupos
Definiciones
Teoría elemental de Representaciones de
Grupos
Representaciones de grupos
Operaciones de simetría
Representación matricial de operaciones
de reflexión y rotación
Representación matricial del grupo C3v
Representación regular
Representaciones reducibles e
irreducibles
Ejemplos
Propiedades importantes de
Representaciones Irreducibles de
Grupos.
Carácter de una representación
irreducible (RI)
Dimensión de una RI
Teorema de gran ortogonalidad
Relación entre las RI y RR de un
grupo
El grupo de rotaciones
tridimensionales
Caracteres
Ejemplo: Desdoblamientos de
campo cristalino
Elementos de Teoría de la Simetría
Introducción
Mecánica
Cuántica
Mecánica
Estadística
Teoría de la Simetría
Elementos de Teoría de la Simetría
El papel de la Simetría
Isotropía
Homogeneidad
Espacial
Reflexión
especular
Inversión
Temporal
Simetría del operador
Hamiltoniano
Leyes de conservación
Momento
angular
Momento
lineal
Paridad
Principio de
Microreversibilidad
Elementos de Teoría de la Simetría
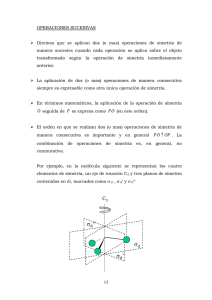
Conceptos de simetría
Operación de Simetría
Al actuar sobre un objeto lo deja
invariante
Por ejemplo: rotaciones,
permutaciones, translaciones,
reflexiones, inversiones, etc…
Elemento de Simetría
E, C31, C32, σva, etc
Cada elemento de simetría lleva
asociada una operación de
simetría.
Grupo C3v
y
E
a
σvb
σvc
x
0
c
C3-1 = C32
b
σva
C31
Elementos de Teoría de la Simetría
Conceptos de simetría
No Elemento de Simetría
Operaciones de Simetría
1
Elemento Identidad: E
No hace ninguna operación
2
Plano de reflexión: σ
Reflexión en un espejo
3
Centro de inversión: I
Cambio de signo de todas las
coordenadas
4
Eje de rotación propia: Cn
n rotaciones alrededor de un eje C6
genera C61, C62, C63, C64, C65, C66,
5
Eje de rotación impropia: Sn
n rotaciones alrededor de un eje
seguidas por una reflexión en un
plano perpendicular.
Elementos de Teoría de la Simetría
Conceptos de simetría
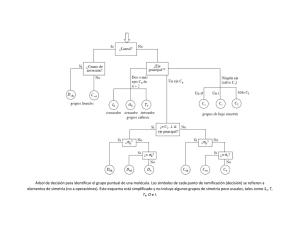
Definición de grupo: Un conjunto de elementos de simetría E, A, B, C,
…, X forman un grupo G si satisfacen:
Existe un elemento E ∈ G (identidad o elemento neutro) tal que
EX=XE=X
Cada elemento X ∈ G tiene su inverso X-1 ∈ G. X X-1=E
Propiedad de cierre: el producto de dos elementos A, B ∈ G es otro
elemento C=AB ∈ G (AA=A2 ∈ G)
Propiedad asociativa: A(BC)=(AB)C
En general AB≠BA, los elementos no conmutan ahora bien:
Si AB=BA ⇒Grupo conmutativo o Abeliano
Si AB≠BA ⇒Grupo no-conmutativo o no-Abeliano
Elementos de Teoría de la Simetría
Conceptos de simetría
Grupo C3v
y
C3v E
C31 C32 σva
σvb σvc
a
E
C31 C32 σva
σvb σvc
σvc
σva σvb
E
C31 C31 C32 E
σvb
σvc
C32 C32 E
C31 σvb
σvc
σva
x
0
σva σva σvb σvc
c
C3-1 = C32
E
E
C31 C32
b
σva
C31
σvb σvb σvc
σvc
σvc
σva C32 E
C31
σva σvb C31 C32 E
Elementos de Teoría de la Simetría
Definiciones
Orden del grupo es el número de
elementos de simetría (h) que contiene el
grupo.
Para C3v h = 6
Un subgrupo G de un grupo H es un
subconjunto de elementos de simetría de
H que forman grupo
(E, σva ) es subgrupo de h = 2 de C3v
C3 es subgrupo de h = 3 de C3v
Propiedad: si un grupo H de orden h
tiene un subgrupo G de orden g
entonces h /g = n
Grupo C3
E
a
C3 = C3
-1
2
c
b
C31
C3
E
C31 C32
E
E
C31 C32
C31 C31 C32 E
C32 C32 E
C31
Elementos de Teoría de la Simetría
Definiciones
Coset. Es el producto de cada elemento
del grupo H con su subgrupo G
Ejemplo: G = (E, σva ), H = C3v ,
1) coset E x G=E(E, σva )= E, σva =G
2) coset C31 x G=C31 (E, σva )= C31 , σvc
3) coset C32 x G=C32 (E, σva )= C32 , σvb
4) coset σva x G= σva (E, σva )= σva , E=G
5) coset σvb x G= σvb (E, σva )= σvb , C32
6) coset σvc x G= σvc (E, σva )= σvc , C31
Si A ∈ H y A ∈ G entonces A x G = G
Sean dos cosets L y M:
O son idénticos L ≡ M
OL∩M=∅
Propiedad: Si cada coset se
repite k veces entonces h/k es
un entero. Este entero es
llamado índice del subgrupo G
en el grupo H. El índice da el
número de cosets distintos.
Ejemplo: G = (E, σva ), H = C3v
h=6. Cada coset se repite 2 veces
entonces el índice de G en H es
6/2=3
Elementos de Teoría de la Simetría
Definiciones
Transformaciones de semejanza.
Si A y X ∈ H entonces X-1AX=B ∈ H
decimos entonces que
B es el transformado por
semejanza de A
A y B son elementos conjugados
Una clase ξ de elementos es un
conjunto de elementos que son
conjugados unos de otros.
Propiedades
X-1AX=A (X=E o algún otro)
Si A=X-1BX ⇔ B=Y-1AY (X=Y-1)
Si A=X-1BX y B=Y-1CY ⇒
A=Z-1CZ
Ejemplo: Sea el grupo H = C3v
Veamos que elementos son
conjugados con σva.
E-1 σva E = σva
(C31 )-1 σva C31 = σvc
(C32 )-1 σva C32 = σvb
(σva )-1 σva σva = σva
(σvb )-1 σva σvb = σvc
(σvc )-1 σva σvc = σvb
Los elementos σva σvb σvc son
conjugados unos de otros
C31 y C32 son conjugados
E es conjugado consigo mismo
C3v tiene 3 clases {E}; {C31, C32 };
{σva, σvb, σvc} de orden 1, 2, 3 resp.
h= 6 dividido por 1, 2, 3 es entero.
Elementos de Teoría de la Simetría
Definiciones
Multiplicación de clases.
Sean ξi y ξ j dos clases de un
grupo H.
Entonces ξ i ξ j =Σk cij,k ξ k.
El entero cij,k nos indica el
número de veces que la clase ξk
aparece como resultado de la
multiplicación de ξ i y ξ j
C3v E
C31 C32 σva
σvb σvc
E
C31 C32 σva
σvb σvc
σvc
σva σvb
E
C31 C31 C32 E
C32 C32 E
C31 σvb
σva σva σvb σvc
σvb σvb σvc
σvc
σvc
E
σvc
σva
C31 C32
σva C32 E
C31
σva σvb C31 C32 E
Ejemplo. Sean las clases de C3v
ξ2={C31, C32 } ξ3={σva, σvb, σvc}
ξ3 ξ2 = {σva, σvb, σvc} {C31, C32 } =
ξ1={E}
σva {C31, C32 }+σvb {C31, C32 }+σvc {C31, C32}
σvb + σvc + σvc + σva + σva + σvb =
2σva + 2σvb + 2σvc =2{σva, σvb, σvc}=2ξ3
por tanto c32,3 = 2
ξ3 ξ3 =3ξ1 + 3ξ2
c33,1 = 3 y c33,2 = 3
Elementos de Teoría de la Simetría
Definiciones
Grupos isomorfos. Si existe una
correspondencia 1 a 1 entre los dos
grupos que además preserva la
tabla de multiplicación
Ejemplo C3v y S3 (Grupo de
permutaciones de 3 elementos)
S1S2S3=E
S3S2S1=C
S1S3S2=A
S2S3S1=D
S3S1S2=B
S2S1S3=F
S3
E
C3v E
A
B
C
D
F
σva C31 σvb C32 σvc
S3
E
A
B
C
D
F
E
E
A
B
C
D
F
A
A
E
C
B
D
F
B
B
F
D
A
E
C
C
C
D
F
E
A
B
D
D
C
E
F
B
A
F
F
B
A
D
C
E
Elementos de Teoría de la Simetría
Definiciones
Grupos Homomorfos. Si existe una
correspondencia varios a 1 entre los
dos grupos que además preserva la
tabla de multiplicación
Ejemplo. Sea el grupo C4
C4
E
C41 C42 C43
E
E
C41 C42 C43
C41 C41
E
Elemento
Operación
I
Multiplicar por 1
A
Multiplicar por -1
C43 E
C42 C42 C43 E
C43 C43 E
Sea el grupo
C41
C41 C42
C4
E
P-1 I
I
A
I
I
A
A
A
I
C41 C42 C43
A
I
A
Teoría elemental de Representaciones de Grupos
Representaciones de grupos
Representación del grupo G. Es un conjunto de matrices Γ = {D(g), g ∈ G} ,
cada una asociada a un elemento del grupo g ∈ G, que preserva la tabla de
multiplicar del grupo. Si R, S y T ∈ G
RS = T ⇒ D( RS) = D(T ) = D(R) × D(S)
La representación depende del conjunto de vectores base
Ejemplo. El grupo C3v
Etiqueta
E
C13
C32
σ va
σ vb
σ vc
Γ1
Γ2
1
1
1
1
1
1
1
−1
1
−1
1
−1
Γ3
1
−
1 0 2
3
0 1
−
2
3
2
1
−
2
1
−
2
3
2
3
2
1
−
2
−
1
−
−1 0 2
3
0 1
−
2
−
3
2
1
2
1
2
3
2
3
2
1
−
2
Teoría elemental de Representaciones de Grupos
Representación matricial de operaciones de reflexión y rotación
Rotación Cα
En 2 D
cosα
D(Cα ) =
− sin α
sinα
cosα
Rotación Cα
En 3 D
cosα
D(Cα ) = − sin α
0
−1 0
D(σ x ) =
0 1
sinα
cosα
0
0
0
1
Reflexión σx
En 2 D
Reflexión σx
En 3 D
−1 0 0
D(σ x ) = 0 1 0
0 0 1
Teoría elemental de Representaciones de Grupos
Representaciones matriciales de C3v
Base: los orbitales px y py (px= sinθ cosφ py= sinθ sinφ)
1
−
1
2
D(C3 ) =
3
−
2
3
2
1
−
2
1
−
2
2
D(C3 ) =
3
2
3
2
1
−
2
−
−1 0
D(σ va ) =
0 1
1
−
2
D(σ vb ) =
3
−
2
−1 0 0
D(σ va ) = 0 1 0
0 0 1
1
−
2
3
D(σ vb ) =
2
0
−1
−1
D(σ vb ) =
−
3
2
1
2
D(σ vc ) =
1
2
3
2
3
2
1
−
2
D( E) =
1 0
0 1
Base: ejes rectangulares
1
−
2
3
1
D(C3 ) = −
2
0
3
2
1
−
2
0
0
1
0
1
−
2
2
3
D( C3 ) =
2
0
3
2
1
−
2
0
−
0
0
1
3
2
1
2
0
0
0
1
1
2
3
D(σ vc ) = −
2
0
3
2
1
−
2
0
−
0
0
1
1 0 0
D(E) = 0 1 0
0 0 1
Base: ejes oblicuos
1
D(C3 ) =
−1 1
−1 0
2
D( C3 ) =
0
1
−1
−1
D(σ va ) =
1
0
0 1
1 0
D(σ vc ) =
−1 0
−1 1
D( E) =
1 0
0 1
Teoría elemental de Representaciones de Grupos
La representación regular
Siempre se puede construir a partir
de la tabla de multiplicar del grupo.
Se ordena la tabla de tal manera
que en la diagonal este siempre la
identidad
La representación regular se
obtiene para cada elemento
reemplazando el elemento por 1
en la tabla y por ceros el resto
0
0
1
2
D(C3 ) =
0
0
0
1 0 0 0 0
0 1 0 0 0
0 0 0 0 0
0 0 0 0 1
0 0 1 0 0
0 0 0 1 0
0
0
0
D(σ vc ) =
0
0
1
0 0 0 0 1
0 0 1 0 0
0 0 0 1 0
1 0 0 0 0
0 1 0 0 0
0 0 0 0 0
C3v E
C32 C31 σva
σvb σvc
E
C32 C31 σva
σvb σvc
C32 σvc
σva σvb
E
C31 C31 E
C32 C32 C31 E
σva σva σvc
σvb E
σvb σvb σva σvc
σvc
σvc
σvb σvc
σva
C31 C32
C32 E
C31
σvb σva C31 C32 E
Teoría elemental de Representaciones de Grupos
Representaciones reducibles e irreducibles
Sea Γ = {D(E), D(A), D(B), …} una representación de un grupo G (E,
A, B,... ∈ G). Si somos capaces de encontrar una matriz U, unitaria, tal
que U-1ΓU= Γ’ sea diagonal a bloques entonces diremos que Γ es
reducible y el conjunto Γ’ = {D’(E), D’(A), D’(B), …} será otra
representación del grupo G.
Representaciones
0
D' 1 ( A)
irreducibles
−1
D' ( A) = U D( A)U =
D' 2 (A)
D' 3 (A)
0
D' 4 ( A)
0
D' 1 ( B)
D' 2 ( B)
−1
D' (B) = U D( B)U =
D' 3 ( B)
0
D'
(
B)
4
Γ1 = {D' 1 ( A),D' 1 ( B),}
Γ2 = {D' 2 ( A), D' 2 (B),}
−1
Γ' = U ΓU = Γ1 ⊕ Γ2 ⊕ Γ3 ⊕ ⊕ Γn
D' (g) = D' 1 ( g) ⊕ D' 2 (g) ⊕ D' 3 ( g) ⊕ ⊕ D' n (g) ∀g ∈G
Teoría elemental de Representaciones de Grupos
Representaciones reducibles e irreducibles
Grupo C3v
y
E
a
σvb
σvc
x
0
c
C3v a
b
c
E
a
b
c
C31
b
c
a
C32
c
a
b
σva
a
c
b
σvb
c
b
a
σvc
b
a
c
Representación
reducible Γ
1 0 0
D( E) = 0 1 0
0 0 1
1 0 0
D(σ va ) = 0 0 1
0 1 0
C31
σva
U=
−1
Γ' = U ΓU = Γ1 ⊕ Γ2 ⊕ Γ3 ⊕ ⊕ Γn
1
−
2
3
1
D(C3 ) = −
2
0
3
2
1
−
2
0
0
1
0
1
−
2
2
3
D( C3 ) =
2
0
3
2
1
−
2
0
−
0
0
1
−1 0 0
D(σ va ) = 0 1 0
0 0 1
1
−
2
3
D(σ vb ) =
2
0
0
D(σ vb ) = 0
1
0 0 1
0 0
0 1 0
D( C31 ) = 1
0 1
1 0
0 0
0 1 0
D(σ vc ) = 1 0 0
0 0 1
Transformación
Unitaria U
b
C3-1 = C32
0 1 0
0 1
1 0 0
D(C32 ) = 0
3
2
1
2
0
0
0
1
1
3
1
3
1
3
− 2
3
1
6
1
6
1
3
−1
−1 − 2
U =
3
2
1
0
2
0
1
2
3
D(σ vc ) = −
2
0
3
2
1
−
2
0
−
0
0
1
1
3
1
6
−1
2
1
3
1
−
6
1
2
1 0 0
D(E) = 0 1 0
0 0 1
Propiedades importantes de RI de Grupos.
Carácter de una Representación Irreducible
Llamamos carácter una representación (χ) a la suma de los elementos de la
diagonal (traza) de las matrices de la representación.
En el grupo C3v
1
−
1
2
D(C3 ) =
3
−
2
3
2
1
−
2
χ(C31) = -1
1
−
2
2
D(C3 ) =
3
2
3
2
1
−
2
−
χ(C32) = -1
−1 0
D(σ va ) =
0 1
χ(σva) = 0
1
−
2
D(σ vb ) =
3
−
2
−
3
2
1
2
χ(σva) = 0
C23
σ va σ vb
1
2
3
2
3
2
1
−
2
χ(σva) = 0
Tabla de caracteres de C3v
Etiqueta E C13
D(σ vc ) =
σ vc
Γ1
Γ2
1
1
1
1
1
1
1
−1
1
−1
1
−1
Γ3
2
−1
−1
0
0
0
D( E) =
1 0
0 1
χ(E) = 2
Dimensión de la
representación l
Propiedades importantes de RI de Grupos.
Teorema de Gran Ortogonalidad
Sea Γj(g)mn el elemento de matriz (m,n) de la RI j asociada al elemento g ∈ G
*
n
n′
Γ i (g)m Γ j (g)m ′
g∈G
∑
h
= δ i, jδ m, m′ δ n,n ′
li
Sea G=C3v
*
Γ1 (g)Γ2 (g) = 0
g∈G
∑
= 1 ×1 + 2(1× 1) + 3(1 × −1)
*
2
1
Γ 3 (g)1 Γ3 ( g) 2
g∈G
3 3
3 3
= 0 = 0− − + 0+ +
4 4
4 4
*
2
2
Γ 3 (g)1 Γ3 ( g)1
g∈G
3 3
3 3
= 3 = 0 + + +0 + +
4 4
4 4
∑
∑
Propiedades importantes de RI de Grupos.
Teorema de Gran Ortogonalidad
Propiedad 1. La suma de los cuadrados de las dimensiones li de las RI de un
grupo G es igual al orden del grupo h.
2
∑ li
RI de G
2
2
2
=l1 + l 2 + l 3 + = h
Propiedad 2. La suma de los cuadrados de los caracteres (χi(g)) a para cada RI
es igual al orden del grupo h.
∑ χ i (g)* χi (g) =h
g∈G
Propiedad 3. Los vectores cuyas componentes son los caracteres (χi(g)) de 2 RI
diferentes son ortogonales.
∑ χ i (g)* χ j (g) = h δ i, j
g∈G
Propiedad 4. En una representación (reducible o irreducible) los caracteres de
las matrices que representan elementos de la misma clase son iguales
Propiedad 5. El número de RI de un grupo es igual al número de clases de G
Propiedades importantes de RI de Grupos.
Relación entre las RR y las RI de un grupo.
En general una representación reducible RR puede ser descompuesta en RI.
Cada una de las RI puede aparecer en la RR mas de una vez.
c11 c12 c13
a
1
2
b1 b1
c1 c 2 c3
a
Γ
(g)
=
Γ
(g)
=
Γ
(g)
=
a
3
2
2
2
2
1
2
1
b11 b12
b
b
1
2
3
2
2
1
2
c
c
c
b2 b2
3
3
3
()
Γ(g) =
b11
b 12
b12
b22
c11
c12
c13
c12
c22
c23
c13
c32
c33
Γ = 2Γ1 + 2Γ2 + Γ3 = ∑ a jΓ j
j
ai representa el número de veces que la RI Γi aparece en Γ
χ( g) =
∑ a j χ j (g)
j
∑ χ (g)χ i (g) = ∑ ∑ a j χ j (g)χ i (g)
g∈G
=
g∈G j
∑ a j ∑ χ j (g)χi ( g) = ha i
j
g∈G
Propiedades importantes de RI de Grupos.
Relación entre las RR y las RI de un grupo.
1
1
*
*
a i = ∑ χ (g)χ i (g) = ∑ χ (ρ )χ i (ρ )g ρ
h ρ∈G
h g∈G
Ejemplo C3v.
Tabla de caracteres de C3v
Etiqueta E C13
C23
σ va σ vb
σ vc
Γ1
Γ2
1
1
1
1
1
1
1
−1
1
−1
1
−1
Γ3
2
−1
−1
0
0
0
ΓR
7
ΓT
aΓ T =
3
1
0
-3
1
1
[ 7 ×1 × 1+ 1× 1 × 2 + (−3) × 1× 3 ] = 0
6
1
a 2 = [7 × 1× 1+ 1 ×1 × 2 + (−3) × ( −1) × 3 ] = 3
6
1
a 3 = [7 × 2 × 1+ 1 × (−1) × 2 + (−3) × 0 × 3] = 2
6
a1 =
R
Γ = 3Γ2 + 2Γ 3
1
1
T
T
χ ( g)χ (g) = [3× 3 ×1 + 0 × 0 × 2 + 1× 1 × 3] = 2 > 1⇒
∑
6 g∈G
6
ΓT es reducible
T
Γ = Γ1 + Γ3
El grupo de Rotaciones O3
Caracteres.
Grupo continuo de orden infinito
1 ∂
1
∂
∂ 2 ml
ml
+
(
θ
,
φ
)
=
l(l
+
1)Y
sinθ
Y
l (θ , φ )
sinθ ∂θ
∂θ sin 2 θ ∂φ 2 l
Yl
m
(θ ,φ ) = N l l Pl
ml
im l φ
(cosθ ) e
Un elemento del grupo Rα (rotación de ángulo α)
Rα Yl
ml
ml
(θ ,φ ) = Yl
ml
(θ ,φ − α ) = Yl
ml
− iml α
(θ , φ ) e
En el espacio de dimensión 2l+1
e −ilα
0
l
Γ (α ) =
0
0
e−i (l −1)α
0
0
0
ilα
e
l
l
χ (α ) = TrΓ (α ) =
sin(l +
1
)α
2
1
sin α
2
El grupo de Rotaciones O3
Caracteres.
l
l
l
l
χ (α + 2 π ) = χ (α )
Para l entero
Para l semi-entero
Para l semi-entero vemos que una
rotación de ángulo 2π no es
equivalente al elemento identidad.
La identidad ahora corresponde a
una rotación de ángulo 4π
χ (α + 2 π ) = − χ (α )
Esto se puede solucionar
introduciendo un nuevo elemento
de simetría lo que da lugar a los
grupos dobles
Tabla de caracteres de dC3v
d
C3v
Γ1
E
1
E
1
2C3
1
2C3
1
3σ v
1
3σ v
1
Γ2
Γ3
1
2
1
2
1
−1
1
−1
−1
0
−1
0
Γ4
Γ5
2
1
−2
−1
1
−1
−1
1
0
i
0
−i
Γ6
1
−1
−1
1
−i
i
Ejemplo: desdoblamientos de campo cristalino
Supongamos un electrón en un
nivel f inmerso en un campo de
simetría cúbica.
f => l=3 => (2l+1)=7 funciones propias
Que transforman de acuerdo a la
representación D3 del grupo
completo de rotaciones O3
El grupo O es un subgrupo (por tanto
de menor simetría) del grupo O3.
Tendremos, pues, que reducir la
representación D3 de O3 en RI de O
Ejemplo: desdoblamientos de campo cristalino
Tabla de caracteres de O
O
E 3C24
Γ1
Γ2
1
1
Γ3
Γ4
6C2
8C3
6C4
1
1
1
−1
1
1
1
−1
2
3
2
−1
0
−1
−1
0
0
1
Γ5
Dl ≡ D 3
3
7
−1
−1
1
−1
0
1
−1
−1
α
0
π
π
2π/3
π/2
l
l
χ (α ) = TrΓ (α ) =
sin(l +
1
)α
2
1
sin α
2
3
D = Γ2 + Γ4 + Γ5
Γ5(3)
f(7)
Γ4(3)
Γ2(1)
Ión libre
Simetría cúbica
Ejemplo: desdoblamientos de campo cristalino
Reducimos todavía más la simetría
aplicando una tensión en la
dirección (111)
D3
Γ1
E
1
3C2
1
2C3
1
Γ2
Γ3
1
2
−1
0
1
−1
Γ4
Γ5
3
3
−1
1
0
0
Γ2
1
−1
1
Γ5(3)
f(7)
Γ4(3)
Γ2(1)
Γ1(1)
Γ3(2)
Γ2(1)
Γ3(2)
Γ2(1)
Ión libre + Simetría cúbica + Distorsión (111)
Elementos de Teoría de la Simetría
Definiciones
Generadores del grupo
Grupo finito
Grupo infinito
Discreto
Continuo
Grupo cíclico
Subgrupo
índice
Grupo isomorfo
Grupo puntual
Al menos un punto fijo
Si el objeto es finito su grupo de simetría solo puede ser puntual
Grupo espacial
Grupo de traslaciones
Grupo puntual
Grupo quiral
Solo tiene operaciones directas
Grupo no quiral
Tiene alguna operación inversa
Elementos de Teoría de la Simetría
Grupos puntuales
Grupos propios
Grupos impropios
Centrosimétricos
Binarios
Uniaxiales
Diedrales
Multiaxiales
Elementos de Teoría de la Simetría
Simetría de los cristales
Celda primitiva
Celda múltiple
Un cristal puede ser invariante solo bajo rotaciones de índice n=1,2,3,4,6
(relación de compatibilidad)
Hessel 1830, 32 grupos puntuales cristalográficos
11 propios
10 impropios
11 centrosimétricos (Grupos de Laue)
7 sistemas cristalinos derivados de los 7 grupos puntuales centrosimetricos
diedrales.(Clases de Laue)
-1, 2/m, mmm, -3m, 4/mmm, 6/mmm, m-3m
Triclínico, monoclínico, ortorómbico, trigonal, tetragonal, hexagonal y
cúbico
14 redes de Bravais
Elementos de Teoría de la Simetría
Simetría de los cristales
Elementos de Teoría de la Simetría
Simetría de los cristales
Fedorov y Schoenflies 1890. 230 grupos espaciales
73 simórficos (sin planos de deslizamiento ni rototraslaciones)
157 no simórficos
No son producto directo de los grupos puntuales y las traslaciones
El grupo puntual debe ser un subgrupo del grupo de la red (clase
de Laue)
21; 3 1, 3 2; 4 1, 4 2, 4 3; 6 1, 6 2, 6 3, 6 4, 6 5
Solo 219 son no isomorfos.
11 pares enantiomorfos. (P6122 y el P6522)
Supergrupo mínimo
Subgrupo máximo
Elementos de Teoría de la Simetría
Simetría de los cristales magnéticos
7 sistemas cristalinos, 14 redes de Bravais, 32 grupos puntuales, 230
grupos espaciales
Introducimos un operador R que cambia el signo del momento magnético.
Solo actúa en las coordenadas de espín. Podemos asociar a R a la
inversión temporal
R es un operador antiunitario
90 Grupos de Shubnicov (o de color, o magnéticos)
32 grupos grises RI totalmente simétrica
58 grupos “blanco y negro”. El resto de RI.
C4v
E
2C4
C2
2σv
2σd
Γ1
1
1
1
1
1
C4v(C4v)
4mm
Γ2
1
1
1
-1
-1
C4v(C4)
4m’m’
Γ3
1
-1
1
-1
1
C4v(C2v)
4’mm’
Γ4
1
-1
1
1
-1
C4v(C2v)
Γ5
2
0
-2
0
0
Elementos de Teoría de la Simetría
Grupos espaciales magnéticos
1651 grupos espaciales magnéticos
230 grupos incoloros
230 grupos grises
674 grupos “blanco y negro” asociados con las 14 redes de Bravais
no coloreadas
517 grupos “blanco y negro” asociados con las 22 redes de Bravais
coloreadas