Algebra Lineal Xa:´Algebra Vectorial en R3
Anuncio

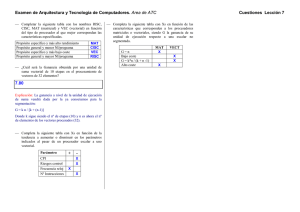
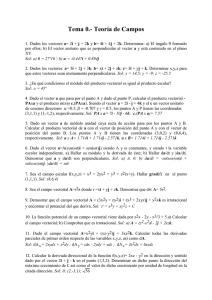
Algebra Lineal Xa: Álgebra Vectorial en R3 José Marı́a Rico Martı́nez Departamento de Ingenierı́a Mecánica Facultad de Ingenierı́a Mecánica Eléctrica y Electrónica Universidad de Guanajuato email: [email protected] En estas notas se presentan los conceptos fundamentales del álgebra vectorial en R3 . Estas notas rompen totalmente con la secuencia de desarrollo del programa de la materia. Hasta estas notas, el tratamiento del álgebra lineal habı́a sido completamente general, los espacios vectoriales podian ser eneadas ordenadas de números reales o complejos, polinomios de un determinado grado en una variable real, matrices formadas por números reales y complejos o funciones de variable real. Sin embargo, en estas notas, exclusivamente estudiaremos el espacio vectorial R3 , la razón de este cambio abrupto es que el espacio vectorial R3 es frecuentemente empleado en la estática y dinámica de partı́culas y cuerpos rı́gidos, el cálculo de varias variables, entre otras disciplinas, de modo que es conveniente que, a pesar de la interrupción en el flujo de los temas del álgebra lineal, se dediquen unas cuantas horas al estudio del álgebra vectorial en R3 . Mas aún, en el trascurso de estas notas se analizarán el producto escalar de vectores en R3 , en realidad este producto escalar es en realidad una forma simétrica bilineal del espacio vectorial R3 . El estudio de los espacios vectoriales puede hacerse sin el estudio de formas simétricas bilineales, que conceden a un espacio vectorial las caracterı́sticas de un espacio ortogonal.1 Además, también en estas notas se estudiará el producto vectorial que concede a un espacio vectorial R3 las caracterı́sticas de una álgebra. 1. Producto Escalar, Formas Simétricas Bilineales. Definición: Producto Escalar o Forma Simétrica Bilineal. Una forma simétrica bilineal sobre un espacio vectorial V es un mapeo del producto cartesiano V × V sobre el campo en el cual se define el espacio vectorial, en nuestro caso el campo de los números reales R. Este mapeo se denota de dos formas alternativas, en textos de ingenierı́a se denota como ·:V×V →R ~u · ~v mientras que en textos de matemáticas se denota como (, ) : V × V → R (~u, ~v ) En estas notas, se empleara la notación ingenieril. Además, la forma simétrica bilineal satisface las siguientes propiedades: 1. Simétrica o conmutativa. ~u · ~v = ~v · ~u 2. ∀~u, ~v ∈ V. Bilineal 1 Si se revisa el programa del curso, se notará que el estudio de las formas simétricas bilineales es el último tema del programa. 1 Lineal en la primera variable. (λ ~u + µ ~v ) · w ~ = λ~u · w ~ + µ~v · w ~ ∀~u, ~v , w ~ ∈ V, ∀λ, µ ∈ R. ∀~u, ~v , w ~ ∈ V, ∀λ, µ ∈ R. Lineal en la segunda variable. ~u · (λ ~v + µ w) ~ = λ~u · ~v + µ~u · w ~ Definición del producto escalar en el espacio Euclı́deo. El espacio R3 junto con la siguiente forma simétrica bilineal o producto escalar, también llamado producto punto, dada por · : R3 × R3 → R ~u · ~v = u1 v1 + u2 v2 + u3 v3 ∀~u, ~v ∈ R3 . donde ~u = (u1 , u2 , u3 ), y ~v = (v1 , v2 , v3 ). se conoce como el espacio Euclı́deo tridimensional. Teorema. Pruebe que el mapeo que justo se acaba de definir satisface las propiedades de una forma simétrica bilineal. Prueba: Sean ~u = (u1 , u2 , u3 ), ~v = (v1 , v2 , v3 ), w ~ = (w1 , w2 , w3 ) ∈ R3 y λ, µ ∈ R. 1. Primero probaremos la simetrı́a del producto escalar o forma simétrica bilineal ~u·~v = (u1 , u2 , u3 )·(v1 , v2 , v3 ) = u1 v1 +u2 v2 +u3 v3 = v1 u1 +v2 u2 +v3 u3 = (v1 , v2 , v3 )·(u1 , u2 , u3 ) = ~v ·~u 2. En segundo lugar probaremos la linealidad de la primera variable (λ ~u + µ ~v ) · w ~ = = = [λ (u1 , u2 , u3 ) + µ (v1 , v2 , v3 )] · (w1 , w2 , w3 ) (λu1 + µv1 , λu2 + µv2 , λu3 + µv3 ) · (w1 , w2 , w3 ) (λu1 + µv1 )w1 + (λu2 + µv2 )w2 + (λu3 + µv3 )w3 = λ(u1 w1 + u2 w2 + u3 w3 ) + µ(v1 w1 + v2 w2 + v3 w3 ) = λ~u · w ~ + µ~v · w ~ 3. Finalmente probaremos la linealidad en la segunda variable ~u · (λ ~v + µ w) ~ = (u1 , u2 , u3 ) · [λ (v1 , v2 , v3 ) + µ (w1 , w2 , w3 )] = (u1 , u2 , u3 ) · (λv1 + µw1 , λv2 + µw2 , λv3 + µw3 ) = u1 (λv1 + µw1 ) + u2 (λv2 + µw2 ) + u3 (λv3 + µw3 ) = λ(u1 v1 + u2 v2 + u3 v3 ) + µ(u1 w1 + u2 w2 + u3 w3 ) = λ~u · ~v + µ~u · w ~ Además el producto escalar o forma simétrica bilineal definida en R3 tiene una propiedad adicional conocida como positiva definida pues ~u · ~u = (u1 , u2 , u3 ) · (u1 , u2 , u3 ) = u21 + u22 + u23 ≥ 0 ∀~u ∈ R3 y ~u · ~u = (u1 , u2 , u3 ) · (u1 , u2 , u3 ) = u21 + u22 + u23 = 0 ⇔ ~u = ~0. 2. Interpretación Geométrica del Producto Escalar en R3 En esta sección, analizaremos la interpretación geométrica del producto escalar en el contexto del espacio Euclideo R3 . Considere un punto P mostrado en la figura 1 y localizado en el espacio tridimensional y suponga que sus coordenadas respecto a un sistema coordenado cartesiano OXY Z están dadas 2 Figura 1: El Vector p~ y sus componentes. por (px , py , pz ) = (p1 , p2 , p3 ). Es entonces, perfectamente posible definir al vector p~, que se origina en el punto O y finaliza en el punto P , que está dado por p~ = (px , py , pz ). Es bien sabido, de la geometrı́a analı́tica que la longitud del vector p~, denotada por | p~ | que es equivalente a la longitud del segmento de lı́nea recta OP , está dada por q p | p~ |= OP = p2x + p2y + p2z = p~ · p~. A partir de ese resultado, es posible definir a los vectores unitarios. Definición: Vector Unitario. Un vector ~u ∈ R3 , se dice que es un vector unitario, y se denota como û, si su longitud es 1; es decir, si q √ | û |= û · û = u2x + u2y + u2z = 1. Mas aún, puesto que √ 1 = 1, la condición para que un vector û sea unitario puede simplificarse a | û |= û · û = u2x + u2y + u2z = 1. La figura 1 también muestra tres vectores unitarios î, ĵ y k̂, cuya direcciones coinciden con los ejes coordenados X, Y y Z.2 Estos vectores unitarios están dados por î = (1, 0, 0), ĵ = (0, 1, 0) k̂ = (0, 0, 1). Debe notarse que este conjunto de vectores, {î, ĵ, k̂} constituye una base, con caracterı́sticas muy especiales, del espacio vectorial R3 , y el vector p~ puede escribirse como p~ = px î + py ĵ + pz k̂ 2 En algunas ocasiones se denotarán como ê1 , ê2 y ê3 . 3 Figura 2: Los Vectores Unitarios Asociados a ~a y ~b. De manera que px , py y pz son las componentes del vector coordenado p~ y se denominan las componentes de p~. Además, es posible definir un vector unitario p̂u en la dirección del vector p~ de la siguiente manera p~ p~ =√ (1) p̂u = | p~ | p~ · p~ Es fácil probar que efectivamente p̂u es un vector unitario s s s p p~ p~ · p~ p~ · p~ √ p~ | p̂u |= p̂u · p̂u = √ = 1 = 1. ·√ = √ 2 = p~ · p~ p~ · p~ p~ · p~ p~ · p~ De la ecuación (1), se tiene que p~ =| p~ | p̂u (2) Es posible entonces intentar una explicación geométrica del producto escalar. Sean ~a, ~b ∈ R3 , entonces empleando la ecuación (2), los vectores pueden escribirse como ~b =| ~b | b̂u ~a =| ~a | âu y empleando las propiedades del producto escalar, se tiene que ´ ³ ~a · ~b = (| ~a | âu ) · | ~b | b̂u =| ~a | | ~b | âu · b̂u de manera que el problema se reduce a determinar el producto escalar entre âu y b̂u . Considere el vector âu ⊥ que está contenido en el plano formado por los vectores ~a y ~b y que está girado, con respecto al vector ~a, 90◦ en sentido antihorario. El restante vector necesario para formar el sistema coordenado, denotado k̂, puede considerarse perpendicular al plano formado por los tres vectores y apuntando hacia el lector. Las coordenadas de los vectores unitarios de âu y b̂u , respecto al sistema coordenado dado por âu , âu ⊥ y k̂ están dadas por âu = (1, 0, 0) b̂u = (Cos θ, Sen θ, 0) Por lo tanto ~a · ~b =| ~a | | ~b | âu · b̂u =| ~a | | ~b | [(1, 0, 0) · (Cos θ, Sen θ, 0)] =| ~a | | ~b | Cos θ. Asi pues, hemos llegado a la interpretación geométrica del producto escalar. 4 Interpretación geométrica del producto escalar. El producto escalar de dos vectores ~a y ~b es igual al producto de las longitudes de los vectores por el coseno del ángulo que forman los vectores. Esta definición permite caracterizar la perpendicularidad de vectores, de la siguiente manera. Definición: Perpendicularidad entre vectores. Dos vectores ~a y ~b diferentes de cero son perpendiculares si su producto escalar es 0. Es decir si ~a · ~b = 0. De la interpretación geométrica del producto escalar, resulta que dos vectores son perpendiculares, también conocidos como ortogonales, si Cos θ = 0 θ = 90◦ Es decir, si o θ = −90◦ . Puede notarse que los sistemas coordenados empleados hasta ahora en estas notas, por un lado î, ĵ y k̂, y por otro lado âu , âu ⊥ y k̂ son mutuamente ortogonales o perpendiculares. Además cada uno de los tres vectores es unitario, también conocido como normalizado, un sistema coordenado con esas caracterı́sticas se conoce como un sistema coordenado ortonormal. Existen dos diferentes tipos de sistemas coordenados ortonormales los sistemas a derechas y los sistemas a izquierda. En los sistemas a derechas, {û1 , û2 , û3 }, si un tornillo a derechas, gira del vector unitario û1 al vector unitario û2 el avance del tornillo será en la dirección y sentido de û3 . Finalmente, a partir de los conceptos desarrollados en esta sección es posible determinar la componente de un vector respecto de otro vector. Definición: de la componente de un vector respecto de otro. Considere dos vectores ~a y ~b, entonces la componente del vector ~b a lo largo de la dirección del vector ~a está dada por ba = ~b · âu = ~b · 3. ~a =| ~b | Cos θ. | ~a | Producto Vectorial. En esta sección, se definirá el producto vectorial. Definición del producto vectorial en el espacio Euclı́deo. Esposible definir en el espacio Euclideo, R3 , la siguiente operación, denominada producto vectorial × : R3 ×R3 → R3 ~u×~v = (u1 , u2 , u3 )×(v1 , v2 , v3 ) = (u2 v3 −u3 v2 , u3 v1 −v3 u1 , u1 v2 −v1 u2 ) ∀~u, ~v ∈ R3 . donde ~u = (u1 , u2 , u3 ), y ~v = (v1 , v2 , v3 ). 3 son los vectores coordenados de ~u, ~v ∈ R respecto a un sistema coordenado ortonormal y dextral o diestro. El producto vectorial puede calcularse con la ayuda de nantes de orden 3, de la siguiente manera ¯ ¯ î ¯ 3 3 3 ×:R ×R →R ~u × ~v = ¯¯ u1 ¯ v1 los vectores unitarios î, ĵ, k̂ y de los determiĵ u2 v2 k̂ u3 v3 ¯ ¯ ¯ ¯ ¯ ¯ ∀~u, ~v ∈ R3 . El producto vectorial tiene las siguientes propiedades, para todo ~u = (u1 , u2 , u3 ), ~v = (v1 , v2 , v3 ), w ~= (w1 , w2 , w3 ) ∈ R3 y para todo λ, µ ∈ R: 1. El producto vectorial es nilpotente; es decir ~u × ~u = ~0 5 ∀~u ∈ R3 . Prueba: Sea ~u = (u1 , u2 , u3 ) ∈ R3 arbitrario, entonces ~u × ~u = (u2 u3 − u3 u2 , u3 u1 − u3 u1 , u1 u2 − u1 u2 ) = (0, 0, 0) = ~0. 2. El producto vectorial es homogeneo en la primera variable. (λ ~u) × ~v 3. = [λ(u1 , u2 , u3 ) × (v1 , v2 , v3 )] = (λu1 , λu2 , λu3 ) × (v1 , v2 , v3 ) = (λu2 v3 − λu3 v2 , λu3 v1 − λv3 u1 , λu1 v2 − λv1 u2 ) = λ(u2 v3 − u3 v2 , u3 v1 − v3 u1 , u1 v2 − v1 u2 ) = λ(~u × ~v ). El producto vectorial es homogeneo en la segunda variable. ~u × (λ ~v ) = [(u1 , u2 , u3 ) × λ(v1 , v2 , v3 )] = (u1 , u2 , u3 ) × (λv1 , λv2 , λv3 ) = (λu2 v3 − λu3 v2 , λu3 v1 − λv3 u1 , λu1 v2 − λv1 u2 ) = λ(u2 v3 − u3 v2 , u3 v1 − v3 u1 , u1 v2 − v1 u2 ) = λ(~u × ~v ). 4. El producto vectorial es aditivo en la primera variable. (~u + ~v ) × w ~ 5. = [(u1 , u2 , u3 ) + (v1 , v2 , v3 )] × (w1 , w2 , w3 ) = (u1 + v1 , u2 + v2 , u3 + v3 ) × (w1 , w2 , w3 ) = ((u2 + v2 )w3 − (u3 + v3 )w2 , (u3 + v3 )w1 − (u1 + v1 )w3 , (u1 + v1 )w2 − (u2 + v2 )w1 ) = (u2 w3 − u3 w2 , u3 w1 − u1 w3 , u1 w2 − u2 w1 ) + (v2 w3 − v3 w2 , v3 w1 − v1 w3 , v1 w2 − v2 w1 ) = ~u × w ~ + ~v × w. ~ El producto vectorial es aditivo en la segunda variable. ~u × (~v + w) ~ = (u1 , u2 , u3 ) × [(v1 , v2 , v3 ) + (w1 , w2 , w3 )] = (u1 , u2 , u3 ) × (v1 + w1 , v2 + w2 , v3 + w3 ) = (u2 (v3 + w3 ) − u3 (v2 + w2 ), u3 (v1 + w1 ) − u1 (v3 + w3 ), u1 (v2 + w2 ) − u2 (v1 + w1 )) = (u2 v3 − u3 v2 , u3 v1 − u1 v3 , u1 v2 − u2 v1 ) + (u2 w3 − u3 w2 , u3 w1 − u1 w3 , u1 w2 − u2 w1 ) = ~u × ~v + ~u × w. ~ 6. El producto vectorial es antisimétrico.3 ~u × ~v = −~v × ~u. Prueba: Considere el vector ~u +~v , puesto que el producto vectorial es nilpotente y bilineal, se tiene que ~0 = (~u + ~v ) × (~u + ~v ) = ~u × (~u + ~v ) + ~v × (~u + ~v ) = ~u × ~u + ~u × ~v + ~v × ~u + ~v × ~v ~ = 0 + ~u × ~v + ~v × ~u + ~0 = ~u × ~v + ~v × ~u Por lo tanto ~u × ~v = −~v × ~u. 7. El producto vectorial no es asociativo, pero satisface la identidad de Jacobi. Puesto que no es asociativo, se tiene que ~u × (~v × w) ~ 6= (~u × ~v ) × w. ~ 3 Como tarea pruebe este resultado de forma directa; es decir, mediante cálculo directo. 6 Probaremos que el producto vectorial satisface la identidad de Jacobi, es decir ~u × (~v × w) ~ +w ~ × (~u × ~v ) + ~v × (w ~ × ~u) = ~0. Considere, ~u × (~v × w) ~ +w ~ × (~u × ~v ) + ~v × (w ~ × ~u) = [u2 (v1 w2 − v2 w1 ) − u3 (v3 w1 − v1 w3 ) , u3 (v2 w3 − v3 w2 ) − u1 (v1 w2 − v2 w1 ) , u1 (v3 w1 − v1 w3 ) − u2 (v2 w3 − v3 w2 )] + [w2 (u1 v2 − u2 v1 ) − w3 (u3 v1 − u1 v3 ) , w3 (u2 v3 − u3 v2 ) − w1 (u1 v2 − u2 v1 ) , w1 (u3 v1 − u1 v3 ) − w2 (u2 v3 − u3 v2 )] + [v2 (w1 u2 − w2 u1 ) − v3 (w3 u1 − w1 u3 ) , v3 (w2 u3 − w3 u2 ) − v1 (w1 u2 − w2 u1 ) , v1 (w3 u1 − w1 u3 ) − v2 (w2 u3 − w3 u2 )] = ~0. Puesto que el producto vectorial es homogeneo y aditivo en la primera variable, se dice que es lineal en la primera variable. Puesto que el producto vectorial es homogeneo y aditivo en la segunda variable, se dice que es lineal en la segunda variable. Puesto que es lineal en ambas variables se dice que el producto es bilineal. 4. Interpretación Geométrica del producto vectorial. Es posible ahora intentar una interpretación geométrica del producto vectorial. Para tal fin, emplearemos el sistema coordenado ortonormal y a derechas mostrado en la figura 2, donde los vectores âu , âu ⊥ , k̂ es además un sistema a derechas. En este caso, puesto que el producto vectorial es bilineal, se tiene que ~a × ~b = (| ~a | âu ) × (| ~b | b̂u ) Pero en términos del sistema ortonormal y a derechas, formado por âu , âu ⊥ , k̂, las coordenadas de âu , b̂u , están dadas por âu = (1, 0, 0) b̂u = (Cos θ, Sen θ, 0) de manera que ~a × ~b (| ~a | âu ) × (| ~b | b̂u ) =| ~a || ~b | âu × b̂u =| ~a || ~b | (1, 0, 0) × (Cos θ, Sen θ, 0) = | ~a || ~b | Sen θ (0, 0, 1) =| ~a || ~b | Sen θ k̂ = (3) Es pues posible indicar la interpretación geométrica del producto vectorial. El producto vectorial de dos vectores ~a × ~b es 1. Un vector de magnitud | ~a || ~b | Sen θ. 2. Perpendicular a ambos ~a y ~b. 3. En el sentido del dedo pulgar, cuando se aplica la regla de la mano derecha. Es decir, cuando usando la mano derecha, los dedos se enrollan de manera que se muevan del ~a al vector ~b, el dedo pulgar indica el sentido del vector ~a × ~b. 5. Triple Producto Escalar. En esta sección se analizará el significado geométrico del triple producto escalar. A partir de las definiciones del producto escalar y producto vectorial, el triple producto escalar de tres vectores ~u, ~v , w ~∈ R3 está dado por (~u × ~v ) · w ~ = (u2 v3 − u3 v2 , u3 v1 − v3 u1 , u1 v2 − v1 u2 ) · (w1 , w2 , w3 ) = u2 v3 w1 − u3 v2 w1 + u3 v1 w2 − v3 u1 w2 + u1 v2 w3 − v1 u2 w3 7 ∀~u, ~v , w ~ ∈ R3 . o empleando la interpretación del producto vectorial como un determinante, se tiene que ¯ ¯ ¯ u1 u2 u3 ¯ ¯ ¯ (~u × ~v ) · w ~ = ¯¯ v1 v2 v3 ¯¯ ∀~u, ~v , w ~ ∈ R3 . ¯ w1 w2 w3 ¯ A partir de estas definiciones es posible probar las siguientes propiedades del triple producto escalar. 1. Conmutatividad o simetrı́a. (~u × ~v ) · w ~ =w ~ · (~u × ~v ) 2. ∀~u, ~v , w ~ ∈ R3 (4) Ciclicidad. En el apunte de determinantes se probará que el valor de un determinante no se altera si se realiza un número par de intercambios de filas adyacentes, es decir ¯ ¯ ¯ ¯ ¯ ¯ ¯ u1 u2 u3 ¯ ¯ w1 w2 w3 ¯ ¯ v1 v2 v3 ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ v1 v2 v3 ¯ = ¯ u1 u2 u3 ¯ = ¯ w1 w2 w3 ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ w1 w2 w3 ¯ ¯ v1 v2 v3 ¯ ¯ u1 u2 u3 ¯ Esta propiedad de los determinantes, en términos del producto escalar, conduce a (~u × ~v ) · w ~ = (w ~ × ~u) · ~v = (~v × w) ~ · ~u 6. 1. ∀~u, ~v , w ~ ∈ R3 (5) Ejemplos Propuestos. Para los siguientes ejercicios,4 use los siguientes vectores, de R3 . 0 1 4 1 p~ = 0 , ~q = 1 , ~r = 2 , ~v = 0 . 1 1 4 0 Normalize el vector ~r. ¿Cual es la longitud del vector 2 ~r ? 2. Encuentre el ángulo entre los vectores ~v y w. ~ 3. Calcule ~v × w. ~ 4. Calcule el área del paralelogramo formado por los vectores ~v y w. ~ 5. ¿ Cual es el seno del ángulo entre ~v y w. ~ 4 Estos ejercicios están tomados de Farin, G. and Hansford, D. [2005], Practical Linear Algebra: A Geometry Toolbox, Wellesley, Mass: A.K. Peters. 8