Document
Anuncio

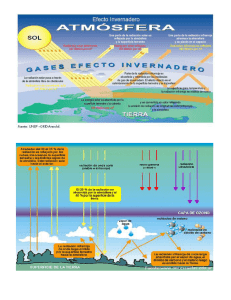
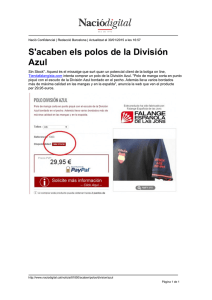
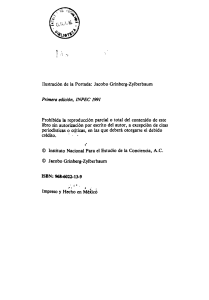
Cuadripolos cargados. Funciones de Fase Mínima El sistema se dice de fase mínima si tanto él como su inversa son causales y estables. Para todos los sistemas causales y estables que tienen la misma respuesta en magnitud, aquellos de mínima fase presentan el mínimo retardo. En consecuencia la función transferencia de un sistema que presenta sus ceros de transmisión en el eje jω o en el semiplano izquierdo se dice función de Fase Mínima En caso de que la función tenga uno o más ceros de transmisión en el semiplano derecho se denomina función de No Mínima Fase. Cualquier función de transferencia de una red pasiva recíproca en escalera es una función de mínima Fase. Esto puede demostrarse: 1. Sea la red en escalera: Los ceros de transmisión de dicha estructura se logran con : a) Los polos de las Z en serie b) Los polos de la Y en paralelo. 2. Tanto las Z como las Y son funciones reales positivas y por consiguiente no tienen polos en el semiplano derecho. 3. Las funciones transferencia que caracterizan este tipo de redes son Funciones de Fase Mínima Determine si la función transferencia V2/V1 del siguiente circuito es de Mínima Fase: 1 I1 ( s ) V1 s V1 I1 1 (s ) s 1 I 2 ( s ) V1 s V1 I2 1 (s ) s I1 I 2 1 (s ) 1 1 s V V2 I 2 s I1 I1 ( s ) 1 1 s s (s ) s 1 (s ) V2 s2 1 s 2 V1 ( s 1 ) s 1 s Esta función que corresponde a una estructura Puente o Lattice simétrica tiene polos complejos conjugados sobre jω y un cero en s=+1 y otro cero en s=-1. Por lo tanto no es una función de Fase Mínima. Se demuestra que la red lattice o puente sin carga se caracteriza por las relaciones con los parámetros de cuadripolos: Z a Z11 Z12 Z b Z11 Z12 G12 V2 V1 I 2 0 Z b Z a p(s) Z b Z a q(s) Z a 1 G12 q ( s ) p ( s ) Z b 1 G12 q ( s ) p ( s ) Z a 1 G12 V2 Z b 1 G12 La realización será factible en la medida en que Za y Zb sean FRP. Para ello si es necesario se afecta a G12 por una constante k1G12 k1 p( s) q( s) Donde k1 puede ser lo suficientemente pequeña, así el 1 de 1±G12 es el que permite hacer los términos de las expansión en fracciones parciales de Za positivos Síntesis de Redes de Resistencia Constante Consideremos el caso de cuadripolos pasivos que presenten una resistencia R a la entrada cuando a la salida se les conecta una R del mismo valor. En este caso es factible conectar en cascada, así la función transferencia resulta: Vo V2 V0 x Vi Vi V2 La función transferencia se puede descomponer en el producto de relaciones de tensión más simples, que puedan realizarse como redes de resistencia constante Hay diferentes tipos de redes de resistencia constante: 1. Redes puente o lattice. 2. Redes T-puenteadas. Red Lattice simétrica: Se demuestra que la matriz de parámetros Z o de circuito abierto es: z11 z 21 z a zb z12 2 z22 za zb 2 z a zb 2 z a zb 2 Condición de simetría: Z11= Z22 Calculando la impedancia que presenta una red de dos puertos pasiva y simétrica terminada en una resistencia R: Las ecuaciones de red: z11I1 z12 I 2 V1 z12 I1 ( z11 R) I 2 0 De donde: I1 ( z11 R)V1 2 2 z11 z11R z12 V z z11R z12 Z entrada 1 11 I1 z11 R 2 2 z z11R z12 R 11 z11 R 2 Si Zentrada debe ser igual a R R z11 z12 2 2 2 Reemplazando los parámetros por los correspondientes a la red Lattice z a zb z a zb R 2 2 2 R z a zb 2 Es la condición para que la red Lattice presente R constante Si la estructura es doblemente cargada, con resistencia de generador Rg Se demuestra que la función transferencia es: V2 1 Z b R Vg 2 Z b R V2 1 R Z a Vg 2 R Z a Estas son las ecuaciones de diseño de la red Lattice simétrica Esencialmente la red se sintetiza igualando coeficientes Red T-puenteada de Resistencia Constante Otra configuración empleada en Redes de Resistencia Constante es la red T-puenteada. Analizando la red, para que cumpla con estas características se demuestra que: R 2 Z a Zb En este caso: Zb V2 R V1 R Z a Z b R Predistorsión En el diseño de Filtros pasivos Se ha supuesto hasta el momento que los inductores y capacitores no presentan pérdidas, por lo tanto no hay disipación asociada. En realidad estos elementos presentan pérdidas, tanto el inductor como el capacitor tienen resistencias asociadas. El inductor tiene una R asociada a su bobinado y en el capacitor el dieléctrico no es un aislante perfecto, por lo tanto ambos tienen resistencia finita. Factor de calidad. Medido a una frecuencia de corte, o frecuencia central de un filtro X L L qL RL RL RC qC CRC XC Para el inductor, circuito serie En el capacitor circuito equivalente paralelo Caso ideal RL 0, qL RC , qC Valores prácticos qL = 15 o menor qC=100 Z L sL RL ( s ZC Normalizando en relación a ω0 Z L (s ZC 1 )L qL 1 1 s qC 0 qL )L 1 1 sC GC 0 s C qC En el proceso de denormalización de frecuencia s s 0 el factor de denormalización completo C queda : 0 s q 0 Si definimos al factor de pérdidas como la inversa del factor de calidad: 1 dL qL 1 dC qC así : Z L ( s d L ) L ZC 1 s dc C Como vemos hay un corrimiento de la frecuencia que tiene como origen las pérdidas. Si se supone pérdidas uniformes: d d d L C Con el fin de obtener realizaciones prácticas que consideren L y C en condiciones reales se utilizará la predistorsión. Proceso de Predistorsión en el diseño de un filtro, como cuadripolo sin pérdidas terminado en una R de carga 1. 2. 3. Se reemplaza s por s-d en H(s) pues se conoce a priori que existirá un corrimiento a posteriori de magnitud s+d, por lo tanto se tratará de ecualizarlo. Se realiza H’(s)=H(s-d) como una red LC terminada en un resistor. Se remueve los efectos de la predistorsión reemplazando s por s+d, así se añade una RL en serie con los inductores y una RC en paralelo con los capacitores. En este paso se está realizando una H’(s) cuyas singularidades tienen un desplazamiento en la dirección de +σ. Con este corrimiento las singularidades (polos y ceros) no deben salir del semiplano izquierdo del plano complejo. Ejemplo Diseñar el filtro que presenta la siguiente especificación con RL=1 V2 2 H ( s) 2 V1 s 2s 2 Considerando que qL=qC=4 y d=1/4 Se reescribe H(s) como H’(s)=H(s-1/4) y se sintetiza dicha expresión: 2 H '( s) 3 25 2 s s 2 16 1 V2 2 H ( s) 2 V1 s 2s 2 jw 0.5 0 Polos -1 + j 1 -1 - j 1 -0.5 -1 -1 -0.5 0 Sigma 0.5 1 2 H '( s) 3 25 s2 s 2 16 Polos -0.75 + j 1 -0.75 - j 1 Es un filtro pasabajos del tipo todo polos, por lo tanto sintetizo con la primera forma de Cauer. Diseñando con los valores predistorsionados el circuito con elementos ideales presenta la siguiente estructura: Considerando el diseño con los elementos con pérdidas se obtiene la siguiente topología 24 1 6 * 25 4 25 2 1 1 Gc C * d * Mho 3 4 6 Rc 6 RL L * d A partir del análisis se obtiene la siguiente H(s) V2 25 /16 H ( s) 2 V1 s 2s 2 La especificación fue V2 2 H ( s) 2 V1 s 2s 2 El diseño con elementos con qL= qC=4 V2 25 /16 H ( s) 2 V1 s 2s 2 1 Volvieron los polos a la ubicación de la especificación La diferencia que se obtiene es la atenuación a frecuencia cero [dB] 20log 25 / 32 2.1442dB jw 0.5 0 -0.5 -1 -1 -0.5 0 Sigma 0.5 1