Informe - Escuela de Ingeniería Eléctrica
Anuncio

Universidad de Costa Rica
Facultad de Ingeniería
Escuela de Ingeniería Eléctrica
IE – 0502 Proyecto Eléctrico
“Implementación de un sistema de control para
Galvanómetros utilizado
en el direccionamiento de Láser”
Por:
Carlos Luis Castro Salas
Ciudad Universitaria Rodrigo Facio
Diciembre del 2010
i
“Implementación de un sistema de control para
Galvanómetros utilizado
en el direccionamiento de Láser”
Por:
Carlos Luis Castro Salas
Sometido a la Escuela de Ingeniería Eléctrica
de la Facultad de Ingeniería
de la Universidad de Costa Rica
como requisito parcial para optar por el grado de:
BACHILLER EN INGENIERÍA ELÉCTRICA
Aprobado por el Tribunal:
_________________________________
Ing. Dr. Lucky Lochi Yu Lo
Profesor Guía
_________________________________
Ing. Dr. Jaime Cascante Vindas
Profesor lector
_________________________________
Ing. Mauricio Espinoza
Profesor lector
ii
DEDICATORIA
A mis padres Carlos y Zoraida por el apoyo brindado
lleno de sacrificios a lo largo de mi vida
RECONOCIMIENTOS
A los profesores Dr. Lochi Yu Lo, Dr. Jaime Cascante, e Ing. Mauricio Espinoza y al Ing
Lorenzo Quiros por el soporte y comprensión en este proyecto.
iii
ÍNDICE GENERAL
INDICE DE FIGURAS .................................................................................... v
RESUMEN ....................................................................................................... vi
CAPÍTULO 1: Introducción ........................................................................... 1
1.1 Objetivos ........................................................................................................................... 2
1.1.1Objetivo general ...................................................................................................... 2
1.1.2Objetivos específicos .............................................................................................. 2
1.2 Metodología ...................................................................................................................... 2
CAPÍTULO 2: Desarrollo teórico .................................................................. 3
2.1Relaciones matemáticas ..................................................................................................... 3
CAPÍTULO 3: Otros capítulos ....................................................................... 7
CAPÍTULO 4: Conclusiones y recomendaciones ....................................... 16
BIBLIOGRAFÍA ............................................................................................ 17
APÉNDICES ................................................................................................... 19
ANEXOS ......................................................................................................... 20
iv
INDICE DE FIGURAS
Figura 1.1 Propuesta de implementación del sistema de control……………….2
Figura 2.1 Campo magnético debido a una corriente…………………………...3
Figura 2.2 Esquema interno de un galvanómetro………………………………4
Figura 2.3 Detector de posición Óptico (tomado de www.laserfx.com)..............5
Figura 3.1 Circuito para generar un paso en el galvo…………………………..7
Figura 3.2 Respuesta del galvo teórico a la señal doble………………………..8
Figura 3.3 Amplificador proporcional…………………………………………11
Figura 3.4 Amplificador derivador…………………………………………….11
Figura 3.5 Amplificador restador……………………………………………....12
Figura 3.6 Circuito para modelar la función de transferencia del galvo……….12
Figura 3.7 Circuito de control……………………………………………….…13
Figura 3.8 Respuesta a un tren de pasos de diferente amplitud…………….….14
Figura 3.9 Circuito amplificador de potencia……………………………….…15
Figura 3.10 Resultados obtenidos con el laser (lissajous)….……………….…15
Figura 3.11 Resultados obtenidos con el laser (lissajous)….……………….…16
Figura 3.12 Resultados obtenidos con el laser (lissajous)….……………….…16
Figura 3.13 Señal de audio obtenida con el software …………………………..20
v
RESUMEN
El presente es la realización de un sistema de control para galvanómetros con el fin
de direccionar un rayo láser. El sistema implementado se basa en un programa que escribe
un tren de vectores de posición a un puerto paralelo que posteriormente será convertido a
una senal digital para ser enviada al controlador del galvo. Este permite mover
vi
CAPÍTULO 1: Introducción
La aparición de los emisores láser como una fuente de luz coherente y de alta potencia
permite un sin número de aplicaciones en las cuales puede ser utilizado. Los emisores láser
de alta potencia son elementos físicamente grandes difíciles de manipular, además no es
conveniente someterlos a esfuerzos mecánicos o vibraciones por lo sensible que son sus
resonadores a cualquier desalineamiento interno. Por lo tanto si se desea variar la dirección
a la cual el láser está enfocado tendríamos que incurrir en un gran esfuerzo mecánico,
poniendo incluso en peligro la integridad misma de dicho emisor y su estabilidad.
La necesidad de aprovechar las propiedades del láser, ha llevado a la invención de métodos
para lograr guiar y dirigir el haz de luz en una forma confiable y segura. Esto se logra con
el uso de fibra óptica, y el uso de espejos móviles principalmente. Los galvanómetros o
galvos permiten con una configuración sencilla de dos espejos dispuestos en la trayectoria
del láser controlar la proyección del láser para ser dirigida a cualquier punto en un área
específica. El objetivo del presente trabajo es el de encontrar un sistema de control que
permita el direccionamiento de laser de una manera efectiva y rápida. Además se presenta
un sistema para enviar comandos de posición al mismo por medio de la interacción con una
computadora.
1
1.1
Objetivos
1.1.1 Objetivo general
Implementar un sistema de control para galvos que permita el
direccionamiento preciso y rápido del láser.
1.1.2 Objetivos específicos
- Desarrollo de una herramienta de software como interfaz entre el sistema
Láser y el usuario.
- Habilitar el sistema de control para el direccionamiento del láser en los dos
ejes.
- Incrementar la precisión y control de velocidad del control existente.
1.2
Metodología
Se utilizó la siguiente topología para implementar el sistema de control. El control
del sistema es analógico y la generación de las figuras se realiza por software en una PC,
esta estará conectada a un circuito DAC (convertidor Analógico digital). Este último
circuito no se implemento debido a que no se pudo conseguir en el país a tiempo y requería
un AD5440 que es un convertidor digital analógico dual (10bits cada uno) con “latches”
incorporados y permitirá una conexión directa con el puerto paralelo.
Figura 1.1 Propuesta de implementación del sistema de control
2
CAPÍTULO 2: Desarrollo teórico
2.1
Historia del galvanómetro.
En 1820 el Danés Hans Christian Oersted, dio a conocer su descubrimiento de que
la corriente eléctrica produce efectos magnéticos, observando como el paso de una
corriente eléctrica hace desviarse a una aguja imantada. Este descubrimiento se convirtió en
el principio fundamental de los galvanómetros. El galvanómetro, utiliza la fuerza que se
produce entre un campo magnético y una bobina por la que circula una corriente eléctrica
para producir una desviación de una bobina. Dado que la desviación es proporcional a la
intensidad de la corriente se puede medir la intensidad de la corriente eléctrica utilizando
una escala calibrada.
Figura N 2.1. Campo magnético debido a una corriente
Es necesario instalar un resorte que sostenga la aguja para que esta siempre retorne
a su punto de partida cuando no hay corriente y se calibra una escala que prediga el
movimiento de la aguja para las distintas intensidades de corriente, y bajo este
funcionamiento trabajan los amperímetros analógicos como el que se muestra.
3
Figura N 2.2. Esquema interno de un galvanómetro
2.2 Galvos (scanners)
Los galvos (scanners en inglés) trabajan de manera similar ya que son dispositivos
electro-sensitivos. Los movimientos de los galvanómetros de medición son demasiado
lentos, pequeños y débiles como para ser utilizados para mover espejos y así controlar un
rayo láser, por lo que existen algunas diferencias en su construcción en comparación con
los galvos. El rotor se diseña del tamaño mínimo posible para minimizar la inercia de
rotación y así maximizar su velocidad de movimiento. Los galvos de lazo abierto preservan
un resorte que se utiliza como amortiguador en el caso de los galvos de lazo cerrado el giro
del galvo se controla únicamente con la corriente por la bobina.
Más que galvanómetros, los galvos pueden ser entendidos como motores eléctricos
muy livianos y muy rápidos con rotación limitada. La rotación del galvo está determinada
por la corriente aplicada y su dirección es controlada por la polaridad de la misma.
2.3 Tipos de Galvos.
Hay dos tipos principales de galvos, de lazo abierto y de lazo cerrado. Un galvo de
lazo abierto es aquel que no tiene detectores de posición, se dice de lazo cerrado cuando se
utiliza un detector de posición para mayor confiabilidad. Los galvos tienen una barra que
atraviesa su rotor, esta barra tiene una prolongación en uno de sus extremos para poder
4
conectarle el espejo que dirige el rayo láser. Cuando se aplica la corriente eléctrica, la barra
gira junto al rotor en la dirección y el ángulo determinado por la señal.
2.4 Galvos de lazo abierto
Para los galvos de lazo abierto el movimiento es muy predecible, pero no hay
manera de asegurar con exactitud la posición del láser, por este motivo los galvos de lazo
abierto son muy utilizados como actuadores en que la precisión no es necesaria en su
totalidad, así como efectos de luces sencillos. Estos galvos cuentan además con un resorte
que permite amortiguamiento del giro y estabilidad.
2.5
Galvos de lazo cerrado
El galvo de lazo cerrado funciona igual que el de lazo abierto pero tiene algunos
elementos más en su diseño. A la barra que atraviesa el rotor se le agrega un detector de
posición que determina, dentro del rango permitido, la posición exacta de los espejos. En la
actualidad se utilizan dos tipos de dispositivos de localización.
Los sistemas ópticos consisten es un LED que ilumina un receptor fotosensible, de
esta manera, al moverse el rotor este bloquea parcialmente la cantidad de luz que llega al
sensor, y como la luz bloqueada es proporcional al movimiento del rotor, se puede
determinar con exactitud la posición de los espejos. En el diagrama adjunto, el LED se
muestra en verde, mientras que el elemento foto sensible en celeste. La barra que se
muestra en medio está conectada al rotor y por ende a los espejos, y es ella quien bloquea
la luz del LED.
Figura 2.3 Detector de posición Óptico (tomado de www.laserfx.com)
Otro tipo de sensor de posición se puede logra por un método simple utilizando
capacitores, el cual utiliza el principio de que cuando se le aplica una corriente alterna, la
corriente a través del capacitor varia proporcionalmente al valor de la capacitancia
5
obtenida. Al mover las placas se varía el área efectiva del capacitor y a su vez la
capacitancia.
El sistema de control toma la señal de entrada y la compara con la señal de salida
para producir una señal de error. Esta señal de error es procesada por el sistema de control y
este a su vez envía la señal de corrección al galvo. Es importante decir que la posición de
los espejos es comparada en tiempo real con la señal de entrada, y al mismo tiempo se
corrige cualquier error encontrado. Este tipo de control realimentado permite muchísima
precisión y fidelidad, por lo que es utilizado en sistemas donde se necesita tal grado de
perfección. Claro está, al ser un sistema mecánico se tienen límites físicos de que tan rápido
se pueden mover los espejos, y del torque máximo que puede producir el sistema.
2.6
Modelado del galvo
Como se había explicado anteriormente los galvos transforman la corriente en
torque de forma proporcional, cualidad utilizada en los galvanómetros para la medición de
la intensidad de la corriente.
M(i) i * N * S * B
(2.6-1)
Donde M es el torque, i es la intensidad de la corriente, N es el número de vueltas
de la bobina, S es el área de la espira, y B es el campo magnético aplicado.
w Mdt
(2.6-2)
wdt
(2.6-3)
En las ecuaciones 2.6-2 se puede observar como la velocidad angular w es la
integral del torque M y el ángulo θ (ecuación 2.6-3) es a su vez la integral de la velocidad
angular. Utilizando las ecuaciones 2.6-1, 2.6-2, 2.6-3 y despreciando la fricción en el eje se
puede obtener la siguiente relación.
i
NSB *
1
s2
(2.6-3)
Debido a que no se tienen datos del fabricante deberá ser necesario identificar la
contante Kg = NSB del galvo de forma experimental para proceder con el diseño del
sistema de control.
6
CAPÍTULO 3: Desarrollo e implementación
3.1 Modelado del galvo
Debido a que no se contaba con los datos del fabricante del galvo y que para este no se
podía analizar la respuesta a un escalón unitario se diseño un circuito para le identificación
del modelo de galvo.
Los galvo son básicamente integradores dobles o lo que es lo mismo poseen dos polos en el
origen, lo que los hace intrínsicamente inestables. Debido a esto se diseño un circuito que
permitiera la aceleración y desaceleración del galvo en un periodo corto de tiempo, pero
controlado y así observar su respuesta.
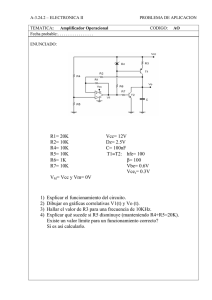
El circuito diseñado consta de dos 555 en cascada y en configuración monoestable. Cada
señal de salida es alimentada a un operacional que las resta, generando así un pulso
negativo y otro positivo de periodos similares.
TRIG
DISC
TRIG
V1 5
C2 100n
DISC
C5 100n
Figura 3.1 Circuito para generar un paso en el galvo.
7
4
6
3
+
+
7
R9 10k
THRES
C6 100n
Initial DC voltage 0
C3 10n
SW1
t On 5m
t Off 100n
OUT
R4 23k
VCC
RESET
CONT
vn
OP1 uA741
2
R10 20k
THRES
R7 10k
U2 CA555
GND
OUT
out
t
C4 100n
GND
C1 10n
RESET
CONT
R1 22k
VCC
U1 CA555
R8 1k
AM1
R6 1k
R3 1k
R2 20k
out2
vp
vacc
Figura 3.2 Respuesta del galvo teórico a la señal doble
Al alimentar los galvos con esta señal estos realizaron un giro y produjeron un cambio en el
voltaje del sensor de posición. Este cambio es proporcional a la integral doble de la señal de
entrada. Los valores de periodo y voltaje de la señal de entrada fueron de 7.28 v y el
periodo de 1.6 ms, con esto se obtuvo que la primera integral fue de 1.16E-2 Vs y 1.86E-5
Vs la segunda derivada. El voltaje que se produjo a la salida del sensor fue de 6.96E-1 por
lo que la ganancia resultante es de 37345. Con este valor se modelo la planta utilizando un
circuito integrador doble con operacionales.
3.2
Sistema de control
Para diseñar el sistema de control se utilizó como propuesta inicial un controlador
PID (proporcional, integral, derivativo)
C ( s) Kp
Ki
Kds
s
(3.2-1)
Donde C(s) es la función de transferencia del PID, Kp es la ganancia proporcional,
Ki es la ganancia integral y Kd es la ganancia derivativa.
8
P( s) Kg
1
s2
(3.2-2)
La ecuación 3.2-2 se obtiene de simplificar la 2.6-3 donde P(s) es la función de
transferencia del galvo y Kg es la constante característica del galvo.
H ( s)
P( s)C ( s)
1 P( s)C ( s)
(3.2-3)
La ecuación 3.2-3 es la función de transferencia del sistema retroalimentado
completo (control y planta), al desarrollar 3.2-3 junto con 3.2-2 y 3.2-1 se obtiene:
H ( s)
Kg ( Kps Ki Kds 2 )
s 3 Kg ( Kds 2 Kps Ki )
(3.2-4)
Como se puede observar la función de transferencia del sistema de control PID
(ecuación 3.2-4) es de tercer orden. Debido a esto se considera un método alternativo de
control.
Utilizando el sistema de control representado en la figura 3.9 se obtiene la siguiente
función de transferencia:
KgKp
1 KgKbKf
G(s)
KgKaKf
KgKpKf
s2 s
1 KgKbKf 1 KgKbKf
(3.2-4)
Donde G(s) es la función de transferencia del sistema con el control alternativo, Kg
es la ganancia o constante del galvo, Kp es la ganancia proporcional, Kb es la ganancia del
9
segmento doble derivativo, Ka es la ganancia del segmento derivativo y Kf es la ganancia
del lazo de retroalimentación. Esta sistema de control presenta varias ventajas:
1) Es de segundo orden por lo que la sintonización se simplifica.
2) Los términos Ka y Kp permiten ajustar el sobrepaso o razón de
amortiguamiento y la velocidad de respuesta de forma separada, lo que permite
un ajuste mucho más sencillo.
Debido a esto se seleccionó el segundo sistema de control para utilizarse con los galvos.
3.3
Diseño del circuito de control
La implementación del sistema de control se realizó de forma analógica debido a las
siguientes razones:
1) La velocidad del sistema de control no depende de la frecuencia de reloj y de
muestreo de un sistema digital.
2) La sintonización y ajuste del galvo se puede realizar de forma sencilla por medio de
potenciómetros sin ser necesario cambiar datos internos o software de un sistema
digital.
Se seleccionaron los amplificadores operacionales c4558c debido a que estos
presentaban un alto “slew rate” de 1V/us.
10
3.3.1 Amplificador proporcional
R2 10k
2
OP1 LM324
1
amp2
+
+
vp
4
3
11
vn
R1 10k
Figura 3.3 Amplificador proporcional
Para el amplificador Proporcional se utilizó la topología básica de amplificador inversor
que presenta una ganancia de: Vin*((Rf/Ri)+1)
3.3.2 Amplificador derivador
C6 220n
2
OP9 LM324
1
amp3
+
+
vp
4
3
11
R21 100
vn
R19 100k
Figura 3.4 Amplificador derivador
Para el amplificador derivador se utilizó la topología básica de amplificador inversor que
presenta una ganancia de: -RoCi
11
3.3.3 Amplificador restador
R6 10k
2
R7 10k
OP2 LM324
1
amp1
+
+
vp
R8 10k
4
3
11
vn
R5 10k
Figura 3.5 Amplificador Restador
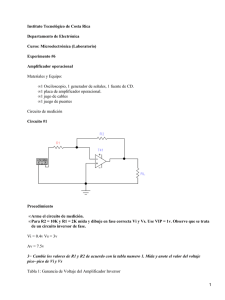
3.3.4 Modelo de la planta utilizando operacionales
Para modelar la planta y debido a que se requiere comprobar el funcionamiento del
control se utilizaron dos operacionales en configuración integradora.
C8 1u
R22 5.18k
2
11
1
OP10 LM324
3
+
+
1
vp
vp
4
OP11 LM324
3
+
+
4
2
11
R23 5.18k
vn
vn
C7 1u
Figura 3.6 Circuito para modelar la función de transferencia del galvo.
12
Vin
R12 2k
R10 2k
R13 15k
R14 15k
vn
P4 5k
Setting 50
R11 47k
R15 47k
3
2
vn
vn
V3 15
V2 15
vp
1
OP3 LM324
amp1
+
+
11
4
R24 47k vp
R2 10k
R7 10k
R6 10k
R8 10k
vp
+
3
2
3
2
OP2 LM324
1
amp1
+
+
R1 10k
OP1 LM324
1
amp2
+
+
R18 100
R21 100
3
2
C5 220n
3
2
3
2
R28 10k
R19 100k
- OP13 LM324
1
amp3
+
+
C6 220n
R29 100k
vn
11
4
vp
vn
11
4
vp
vn
11
4
vp
OP9 LM324
R20 10k
1
amp3
+
+
vn
11
4
R16 10k
vp
OP8 LM324
R17 10k
1
amp4
+
+
vn
11
4
vp
R9 47k
VF1
1
amp4
+
+
+
-
3
2
Salida a etapa de potencia
R33 15k
Retroalimentación
R37 10k
1
OP12 LM324
R25 10k
R35 10k
amp2
+
OP5 LM324
C9 220n
3
2
vn
11
4
vp
R27 300k
vn
11
13
4
Figura 3.7 Circuito de control
vp
R5 10k
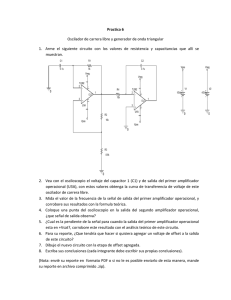
3.3.5 Circuito de control completo
Figura 3.8 Respuesta a un tren de pasos de diferente amplitud
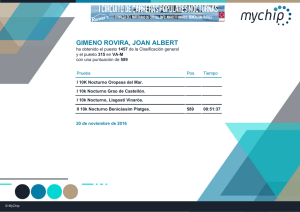
3.4 Diseño del circuito de potencia
Se utilizara una etapa transistorizada para alimentar al galvo debido a que presenta
una alta impedancia y una alta intensidad de corriente de salida. Los transistores
utilizados fueron le TIP41 y el TIP42 que como características básicas cuenta con
una corriente de colector continua de 6 Amperios, 10 Amperios pico y una
disipación de potencia de 2W a 25c. La salida del circuito de potencia se conectará a
una resistencia de 50ohms para limitar así la corriente a un valor máximo de 0.3
amperios. Debido a esto la potencia consumida por los transistores será de 0.45W
máximo que es mucho menor a los 2W de disipación a 25c de le especificación, por
lo que no se utilizara un disipador. Debe recalcarse que para obtener un mayor
torque, y a su vez una mayor velocidad de respuesta se puede reducir el valor de
esta resistencia de salida y utilizar un disipador en los transistores ya que esto
permitiría un mayor flujo de potencia y de corriente al galvo.
14
vp
vn
vp
R6 10k
T1 TIP41
vp
T2 TIP42
vn
vn
VG1
Figura 3.9 Circuito amplificador de potencia
Figura 3.10 Diagrama de lissajous obtenido con el laser
15
out
R1 1k
+
V2 15
R3 50
1
4
OP1 LM324
3
+
+
AM2
2
R2 5.5
R8 10k
11
V1 15
Figura 3.11 Diagrama de lissajous obtenido con el laser
Figura 3.12 Diagrama de lissajous obtenido con el laser
16
3.5 Resultados
Al utilizar el sistema de control junto con los galvos se procedió a utilizar un generador de
señales analógicas senoidales para controlar los ejes X y Y del controlador.
De este modo se pudo observar las figuras 3.10, 3.11 y 3.12 que muestran figuras de
lissajous que corresponden a diferentes combinaciones de frecuencia y amplitud.
Figura 3.13. Señal de audio obtenida con el software, y reproducida en el osciloscopio.
17
CAPÍTULO 4: Conclusiones y recomendaciones
4.1 Conclusiones
Se logró obtener un sistema de control para ambos ejes tanto X como Y lo que
permitió el direccionamiento del láser de manera precisa y rápida.
Se conectaron de generadores de señales a cada eje lo que permitió dibujar
diagramas de Lissajous utilizando el laser.
La frecuencia de refrescamiento fue mayor a 40hz lo que hizo que las figuras no se
vieran cortadas.
El software permitió enviar los vectores de posición de cada eje al puerto paralelo,
leyendo los datos de una tabla tipo .csv y generada con un software libre.
4.2 Recomendaciones
El circuito convertidor analógico digital no pudo ser implementado en esta parte del
proyecto debido a que no se pudo conseguir el convertidor requerido, como recomendación
quedara utilizar un AD5440 ya que este permite una interfaz muy sencilla entre el puerto
paralelo y el sistema de control.
Se observó una señal de ruido en los sensores de posición por lo que se recomienda
implementar un filtro activo paso bajo con una frecuencia de corte de 1khz para así
incrementar la precisión y velocidad del galvo sin presentar oscilaciones.
18
BIBLIOGRAFÍA
Libros:
1. Cascante Vindas, Jaime; Obando Pradella, Max; Steller Solórzano, Leoardo.
“Instalación y puesta en funcionamiento de un sistema láser Nd: YAG”, [San José,
C.R.], 2003
2. Medrano Flores, Ernesto; Taylor Hernández, Stephen. “Desarrollo preliminar de un
sistema con microcontroladores para manejo simple de espejos”, [San José, C.R.], 2004
Páginas web:
3. ATMEL. “Atmega16A datasheet”,
http://www.atmel.com/dyn/resources/prod_documents/doc8154.pdf
4. United States Patent. “Limited Rotation Motor”,
http://www.patentstorm.us/patents/pdfs/patent_id/4135119.html
5. United States Patent. “Electrically Damped Oscillation Motor”,
http://www.patentstorm.us/patents/pdfs/patent_id/4090112.html
6. United States Patent. “Position Detector”,
http://www.patentstorm.us/patents/pdfs/patent_id/4142144.html
7. United States Patent. “Variable-Capacitance Position Transducing”,
http://www.patentstorm.us/patents/pdfs/patent_id/5099386.html
8. United States Patent. “Moving Magnet Optical Scanner With Novel Rotor Desing”,
http://www.patentstorm.us/patents/pdfs/patent_id/5424632.html
42
9. Asociación Española para la Cultura, el Arte y la Educación. “Magnetismo y
Electromagnetismo”, http://www.natureduca.com/images_fis/elec_galvanometro.gif
10. Angel Franco García. “El Galvanómetro”,
http://www.sc.ehu.es/sbweb/fisica/elecmagnet/campo_magnetico/galvanometro/galvanome
tro.htm#Medida%20de%20la%20constante%20K%20de%20un%20galvan%C3%B3metro
11. Bing Kongmebhol, Reed Farrar, Thomas Bartholomäus. “On the Origin of Motion
Control Specifications”, http://www.newport.com/file_store/Motion_Control/DS04031_Motion_ApNote_1.pdf
19
12. National High Magnetic Field Laboratory. “Mirror Galvanometer”,
http://www.magnet.fsu.edu/education/tutorials/java/mirrorgalvanometer/index.html
13. Francisco G, Ángel. “Electromagnetismo”,
http://www.sc.ehu.es/sbweb/fisica/elecmagnet/campo_magnetico/varilla/varilla.htm
14. Frank Dering, Michael. “The Limits of Human Vision”,
http://www.michaelfrankdeering.com/Projects/EyeModel/limits.pdf
15. James L, Kent. “Psychedelic Information Theory: Chapter 04, Limits of Human
Perception”. http://psychedelic-information-theory.com/Limits-of-Human-Perception
16. Gimenez,M. “Mediciones Especiales”,
http://www.labc.usb.ve/mgimenez/Lab_Circ_Electronicos_Guia_Teorica/Cap7.pdf
20
APÉNDICES
21
ANEXOS
Codigo fuente:
private void button2_Click(object sender, EventArgs e)
{
if (iteradorj < tabla.Columns.Count - 1 && iteradori < tabla.Rows.Count){
label1.Text = tabla.Rows[iteradori][iteradorj].ToString();
int valor = Int32.Parse(tabla.Rows[iteradori][iteradorj].ToString());
PortInterop.Output(888, valor);
iteradorj++;
}
else {
if (iteradori < tabla.Rows.Count - 1 && iteradorj < tabla.Columns.Count) {
label1.Text = tabla.Rows[iteradori][iteradorj].ToString();
int valor = Int32.Parse(tabla.Rows[iteradori][iteradorj].ToString());
PortInterop.Output(888, valor);
iteradori++;
iteradorj = 0;
}
else {
iteradori = 0;
iteradorj = 0;
22
}
}}}}
23
Figuras de lissajous
24