control de motores de corriente directa con interfase a pc basada en
Anuncio

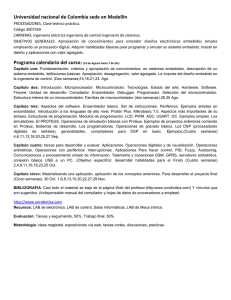
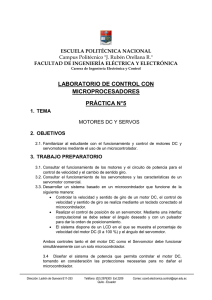
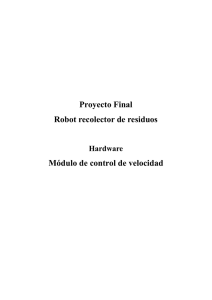
UNIVERSIDAD AUTÓNOMA DE QUERÉTARO DIRECCIÓN DE INVESTIGACIÓN Y POSGRADO MEMORIAS DEL VIII VERANO DE LA CIENCIA DE LA REGIÓN CENTRO Y V VERANO DE LA CIENCIA DE LA UAQ CONTROL DE MOTORES DE CORRIENTE DIRECTA CON INTERFASE A PC BASADA EN UN MICROCONTROLADOR Morales Sánchez, A. (1); M.C. Núñez Olvera, O. F.(2) (1) Instituto Tecnológico de Querétaro (2) Instituto de Investigación en Comunicación Óptica RESUMEN Se desarrollaron el hardware y software para el control de motores; el desarrollo de hardware comprendió el diseño de tarjeta de circuito impreso tanto del circuito de interfase entre la PC, el microcontrolador y los procesadores, como del circuito de potencia para los motores de corriente directa. Con relación al software se desarrollaron los programas de la PC y el microcontrolador siendo que el programa para PC fue hecho de tal manera que el usuario solo tenga que dar los parámetros de trayectoria y del filtro en forma decimal, esto es para que el usuario trabaje de una manera más fácil ya que se evita el trabajo de hacer conversiones entre el sistema decimal, binario y hexadecimal; con respecto al software en el microcontrolador, este fue hecho para que se cumpla la secuencia que requieren los procesadores al cargar datos o comandos. Cabe mencionar que el tipo de comunicación entre la PC y el microcontrolador fue con comunicación serial RS-232. INTRODUCCIÓN Los microcontroladores y microprocesadores son dispositivos muy utilizados que han venido a revolucionar nuestra forma de vida, ya que los podemos encontrar desde algunos aparatos electrodomésticos, calculadoras hasta en naves espaciales y satélites artificiales, y esto se debe a su gran capacidad para realizar millones de operaciones por segundo y además de que al ser fabricados en grandes cantidades su costo se hace relativamente bajo, aunado a que existen múltiples lenguajes con los cuales pueden ser programados y también existen diversos tipos de tecnologías en cuanto a su fabricación. Por todas las razones anteriores es que se pueden utilizar en muchas aplicaciones y en este caso la aplicación que tuvo lugar en este proyecto fue el control de motores de corriente directa por medio de procesadores, los cuales eran programados desde la PC a través de un microcontrolador. DESARROLLO Primero se estableció el número de procesadores los cuales iban a controlar los motores, la idea original consistía en controlar 3 motores pero después de analizar el alcance que se podría lograr con este proyecto, se tomo la decisión de controlar 6 motores ya que de esta manera se puede utilizar en mas aplicaciones; un ejemplo de aplicación sería, control de un brazo manipulador con varios grados de movimiento. Después se procedió con el diseño del circuito electrónico, el cual contiene las siguientes partes: fuente de alimentación, comunicación serial RS-232, microcontrolador, procesadores, convertidores de voltaje digital-analógico, amplificadores operacionales de potencia, y resistencias y capacitores entre varios. El software que se utilizó para lleva a cabo está tarea fue el “EAGLE Layout Editor 4.16r1”, el cual es un programa para diseño electrónico en donde se puede construir el circuito a partir de la simbología de los componentes a la par de que también se puede seleccionar el tipo de dispositivo de manera física, tomando en cuenta que es necesario cuidar la distribución de los componentes para ganar espacio y tratar de evitar malas conexiones Página 1 de 1 UNIVERSIDAD AUTÓNOMA DE QUERÉTARO DIRECCIÓN DE INVESTIGACIÓN Y POSGRADO MEMORIAS DEL VIII VERANO DE LA CIENCIA DE LA REGIÓN CENTRO Y V VERANO DE LA CIENCIA DE LA UAQ que podrían provocar ruido y disminuir el rendimiento del circuito, tales como ruido proveniente de señales de radio frecuencia. Figura 1. Esquemático de circuito electrónico. Figura 2. Diseño del circuito impreso. A partir del diseño del circuito impreso, el software genera un archivo de perforación a partir del cual se perforará la placa de forma automática utilizando una maquina diseñada para estos fines. Otro punto importante de consideración, fue que debido a la cantidad de dispositivos electrónicos que contiene el circuito hubo la necesidad de hacer el circuito impreso por las dos caras, siendo que esto ayudo mucho a ahorrar espacio. La tecnología que permite el montaje de esta clase de circuitos es conocida como THT (Through-Hole Technology), que en español se puede traducir como “tecnología de agujeros pasantes”. Para este diseño de dos caras, los Through-Holes están metalizados por dentro y estos interconectan las dos caras del circuito. Después de que la placa fue perforada, es sometida a una serie de procesos químicos a fin de metalizar los agujeros resultantes, para posteriormente delinear el diseño sobre la capa de cobre. A partir de este momento se cuenta con el circuito impreso donde serán montados y soldados los componentes. Página 2 de 2 UNIVERSIDAD AUTÓNOMA DE QUERÉTARO DIRECCIÓN DE INVESTIGACIÓN Y POSGRADO MEMORIAS DEL VIII VERANO DE LA CIENCIA DE LA REGIÓN CENTRO Y V VERANO DE LA CIENCIA DE LA UAQ Figura 3. Circuito impreso de control e interfase con PC. Figura 4. Circuito impreso de potencia. Después de haber hecho el diseño del circuito impreso, se procedió con la programación del microcontrolador, específicamente el microcontrolador PIC16F877A de la compañía Microchip y fue seleccionado debido a su gran numero de pines los cuales pueden ser programados como entradas o salidas ya sean analógicas ó digitales, además de contar soporte para la comunicación serial; para nuestra aplicación solamente se utilizaron entradas y salidas digitales. Los procesadores que se utilizaron para controlar los motores fueron el LM628 de National Semiconductor, cuyas principales características son: registros de velocidad, aceleración y posición de 32 bits, filtro PID digital programable con coeficientes de 16 bits, dato de salida hacia DAC de 8 ó 12 bits, generador de perfiles trapezoidal de velocidad interno, interfase con encoder incremental en cuadratura. La descripción básica del funcionamiento de los procesadores es la siguiente: se requiere que el microcontrolador se comunique con el procesador por medio del puerto de entradas y salidas para programar trayectorias de velocidad y parámetros del filtro digital; las salidas DAC del procesador se comunican con el convertidor digital-analógico para producir una señal la cual es amplificada en potencia y es la que se aplica al motor; el encoder incremental proporciona la señal de retroalimentación de la posición del motor; el generador de perfiles de velocidad trapezoidal calcula la trayectoria requerida para cualquiera de los modos de operación en velocidad o posición; ya en operación, el LM628 sustrae la posición actual (posición de la retroalimentación) de la posición deseada (posición del generador de perfiles), y el error de posición resultante es procesado por el filtro digital para guiar al motor a la posición deseada. Conociendo esto, se hizo el programa en lenguaje C que posteriormente sería programado en el microcontrolador. El programa del microcontrolador sigue la secuencia en tiempos necesaria para poder cargar o leer ya sea datos o comandos de los procesadores, esto se logro debido que se crearon funciones las cuales se mandaban llamar al programa principal e inclusive dentro de las mismas funciones, lo cual dio como resultado que en el programa principal disminuyeran las líneas de código y que se ahorre memoria ROM del microcontrolador al utilizar mas la memoria RAM. Después de que se obtuvo un programa para el microcontrolador que pudiera controlar los procesadores y estos a su vez los motores, se hicieron pruebas para la comunicación entre la PC y el microcontrolador para determinar la mejor manera de mandar los datos desde la PC a los procesadores por medio del microcontrolador como interfaz. Para esto fue necesario agregarle código al programa del microcontrolador para que pueda trabajar con comunicación serial. Luego entonces, se procedió con la elaboración del programa en la PC, la plataforma que se utilizó para poder hacer trabajar la comunicación serial con el microcontrolador fue LABVIEW, el cual, para poder hacer un programa con este software es necesario trabajar en dos ventanas que son: panel frontal y diagrama de bloques. En el panel frontal se encuentran todos los elementos que van a tener contacto con el usuario, en pocas palabras es la interfaz hacia el usuario; mientras que en diagrama de bloques encontramos todos los elementos que se ponen en el panel frontal para que hagamos conexiones entre estos y poder hacer el programa que convierte esos datos que se agregaron en el panel frontal a datos que pueden ser manipulados por la PC para que puedan ser transferidos al microcontrolador y éste a los procesadores. Este programa ayuda al usuario en la forma de que ya no tiene que hacer los cálculos que se requieren para cargar datos a los procesadores y además de que la forma en que trabaja el usuario con los datos es de manera Página 3 de 3 UNIVERSIDAD AUTÓNOMA DE QUERÉTARO DIRECCIÓN DE INVESTIGACIÓN Y POSGRADO MEMORIAS DEL VIII VERANO DE LA CIENCIA DE LA REGIÓN CENTRO Y V VERANO DE LA CIENCIA DE LA UAQ decimal haciendo que este no haga las transformaciones entre el sistema decimal a sistema hexadecimal o binario. Figura 5. Panel frontal del programa hecho en LABVIEW CONCLUSIONES La estancia permitió conocer la tecnología de fabricación de circuitos impresos de doble cara, así como profundizar el conocimiento para la programación de microcontroladores y la comunicación serial RS-232 entre diversos componentes. El desarrollo del circuito electrónico y la programación de los procesadores con el microcontrolador para el control de motores permite un sin fin de aplicaciones, algunas de ellas podrían ser el control de una mesa perforadora de circuitos impresos, control para un brazo manipulador con alguna aplicación industrial, entonación de motores, etc. REFERENCIAS BIBLIOGRAFICAS Coughlin, R. F. y Driscoll, F. F., “Amplificadores Operacionales y C.I. Lineales”, 5° Edición, Prentice Hall, pp. 411. Axelson, J., “Serial Port Complete”, Lakeview Research, pp. 125-127, 139-146. Robertson, C. T., “Printed Circuit Board Designer's Reference: Basics”, Prentice Hall, 2003. Página 4 de 4