Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Anuncio

Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Tema 6: Controlabilidad y Observabilidad
Parte 3 / 4
Virginia Mazzone
Contenidos
Índices de Observabilidad
Descomposiciones canónicas
Descomposición Controlable/no-controlable
Descomposición observable/no-observable
Descomposición de Kalman
Controlabilidad y observabilidad en forma modal
Descomposiciones canónicas
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Índices de Observabilidad
Sea A y C matrices constantes de n n y q n
respectivamente, supongamos C de rango fila completa. Si
(A; C ) es observable, la matriz O tiene rango n, es decir n filas
l.i. Sea ci la i-ésima fila de C y busquemos filas de arriba a
abajo l.i. de O. Dual a la parte de controlabilidad, si una fila
asociada a cm es linealmente dependiente con las filas
anteriores, también lo seran las posteriores. Sea m la cantidad
de filas linealmente independientes asociadas a cm
(1 + 2 + + q ).
El conjunto f1 ; 2 ; y
; q g se llama índices de observabilidad
= max(1 ; 2 ; ; q )
se llama índice de observabilidad de (A; C )
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Índices de Observabilidad
Índices de Observabilidad
Controlabilidad y observabilidad en forma modal
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposiciones canónicas
Teorema
la propiedad de observabilidad se mantiene invariante frente a
transformaciones de equivalencia
Teorema
El conjunto de índices de observabilidad de (A; C ) se mantiene
invariante bajo cualquier transformación de equivalencia y
cualquier reordenamiento de las filas de C .
Cuando un sistema no es controlable u observable, aún es
posible controlar u observar aquellos estados que sí lo son.
Para ello es necesario separar estos estados. En esta sección
veremos
I Descomposición controlable/no-controlable
I Descomposición observable/no-observable
I Descomposición de Kalman
Consideramos el sistema lineal y estacionario en ecuaciones
de estado
x_ = Ax + Bu
y = Cx + Du
A 2 Rn n ; B 2 Rn p ;
donde
C 2 Rpn ; D 2 Rqp :
^ B;
^ C;
^ D
^)
Vamos a llevar al sistema a una forma canónica (A;
mediante una transformación de equivalencia x^ = P x .
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
(1)
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposición Controlable/no-controlable
rango C = rango B AB
x^_C = A^C x^C + B^C u
y^ = C^C x^C + Du
A
B = n1 < n:
rango C = rango C^ = n1
^
^ ^
C^ = B0C AC0BC
C^ A^nC1 B^C
= C
0
0
= [ q1 q2 : : : qn1 qn1 +1 : : : qn ];
|
{z
} |
{z
}
n1 columnas LI de C
arbitrarias
lleva (1) a
x^_C
A^C A^12 x^C
B^C
=
+
u
x^_C
0
0 A^C x^C
x^C
y = C^C C^C x^ + Du;
C
(2)
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposición Controlable/no-controlable
G (s ) = C^C CC
s
0
(sI
^
= CC CC
donde M = (sI
C^C =
A^nC B^C
1
0
A^n 1 B^C
C
0
B^C A^C B^C
A^nC
1
A^nC 1 B^C
0
;
1
B^C :
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposición observable/no-observable
^C para k n1 son LD de las de C^C ,
Como las columnas de A^kC B
la condición rango C = n1 ) rango C^C = n1 . Así (3) es
controlable.
Finalmente, mostramos que (3) tiene la misma matriz
transferencia que (1), que es la misma que la de (2), pues (1) y
(2) son algebraicamente equivalentes. La matriz transferencia
de (2) es
1 sI A^C
A^12
B^C
A^C )
1
A^C
(s
0
A^C ) B^C + D;
1
A^C )
donde
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
= C^C (sI
(3)
es controlable y tiene la misma función transferencia que (1).
Si C^ es la matriz de controlabilidad de (2), entonces
Entonces x^ = P x , con
Índices de Observabilidad
Controlabilidad y observabilidad en forma modal
Además, la ecuación de estados de orden n1
Sea el sistema (1) con matriz de controlabilidad C tal que
n 1 1
Descomposiciones canónicas
Descomposición Controlable/no-controlable
Teorema (Descomposición controlable/no-controlable)
P
Índices de Observabilidad
1A
^12 (sI
A^C)
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
1.
+D =
M
B^C
+D =
1
^
0
AC)
0
Teorema (Descomposición observable/no-observable)
Sea el sistema (1) con matriz de observabilidad O tal que
rango O
= rango
C
CA
..
.
CAn
1
= n2
< n:
Sea la matriz n n de cambio de coordenadas P
p1
p2
..
.
=
pn
2
..
.
pn
donde las primeras n2 filas son n2 filas LI de O, y las restantes
arbitrarias de forma que P sea no singular.
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposición observable/no-observable
x^_O
A^O 0 x^O
B^O
=
+
u
x^_O
A^21 A^O x^C
B^O
(4)
x^O
^
y = CO 0 x^ + Du;
O
donde A^O 2 Rn n y A^O 2 R(n n )(n n ) y la EE de orden n2
2
2
2
x^_O = A^O x^O + B^O u
y^ = C^O x^O + Du
(5)
es observable y tiene la misma función transferencia que (1).
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposición de Kalman
Entonces la transformación de equivalencia x^ = P x o x = P 1 x^
lleva (1) a la forma
2
Índices de Observabilidad
Descomposiciones canónicas
Descomposición de Kalman
Teorema: Toda EE (1) puede llevarse, mediante una
transformación de equivalencia, a la forma canónica
^
^
ACO 0 A13 0
B^CO
x^CO
x^_CO
^
x^_C O A^21 A^C O A^23 A^24 x^CO
+ BC O u
=
0
x^_CO
^
x^CO
0
0 ACO
0
x^_CO
0
0
0
A^43 A^CO x^CO
y = C^CO 0 C^CO
0 x^ + Du;
(6)
donde x^ : estados controlables y observables
CO
x^C O : estados controlables pero no observables
x^C O : estados no controlables pero observables
x^CO : estados no controlables ni observables:
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Controlabilidad y observabilidad en forma modal
Descomposición de Kalman
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposición de Kalman
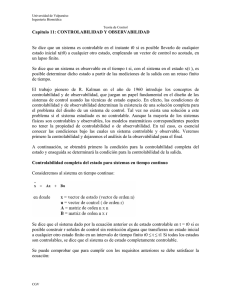
Gráficamente. . .
Además, la ecuación de estados (1) es equivalente a estado
cero a la ecuación controlable y observable
x^_CO = A^CO x^CO + B^CO u
y^ = C^CO x^CO + Du
u
b
-
CO
-
CO
(7)
O
- h-b
6
CO
y tiene la matriz transferencia
G^(s ) = C^CO (sI
CO
A^CO ) 1 B^CO + D:
C
Sólo la parte controlable y observable del sistema está
y Ésta es la
conectada tanto a las entradas como a las salidas.
única parte del sistema que determina la matriz transferencia.
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Descomposición de Kalman
Ejemplo
x2L1
= 1H
C1 = 2F
+
u
−
x1
1
x3
x_ =
0
0
0
0 0 0 x
0;5 0
0
1
y = [0 0 0 1]x + u
+
0;5 0
0
0
u
x_ = Jx + Bu
y = Cx;
+
x4
C2 = 2
y
−
1
1
0
0
Las condiciones para chequear controlabilidad y observabilidad
se vuelven bastante simples. Sea
L2 = 1H
1
+
0 0;5 0
Controlabilidad y observabilidad en forma modal
R=1
1
−
x_C = 10 00;5 xC +
y = [ 0 0 ] xC + u:
0;5 0
u
y =u
Controlabilidad y observabilidad en forma modal
Notación: Denotamos
I la fila de B correspondiente a la última fila de Jij como buij ,
y
I la columna de C correspondiente a la primera columna de
Jij como cpij .
Teorema
1. La ecuación de estados (8) es controlable si y sólo si los
tres vectores fila fbu 11 ; bu 12 ; bu 13 g son linealmente
independientes y los dos vectores fila fbu 21 ; bu 22 g son
linealmente independientes.
2. La ecuación de estados (8) es observable si y sólo si los
tres vectores columna fcu 11 ; cp12 ; cp13 g son linealmente
independientes y los dos vectores columna fcp21 ; cp22 g
son linealmente independientes.
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
0
J2
J21 0
0 J22
0
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
Descomposiciones canónicas
donde J está en forma de Jordan. Para simplificar,
supongamos que J tiene sólo dos autovalores distintos, 1 y
2 , y que puede escribirse como
"J 0 0 #
11
0
0 J12 0
J1 0
J=
= 0 0 J13 h
(9)
i ;
donde las matrices J11 ; J12 y J13 son tres bloques de Jordan
asociados al autovalor 1 , y las matrices J21 y J22 son dos
bloques de Jordan asociados al autovalor 2 .
Circuito no controlable ni observable
Índices de Observabilidad
(8)
Índices de Observabilidad
Descomposiciones canónicas
Controlabilidad y observabilidad en forma modal
Ejemplo: controlab. y observab. en forma modal
1
0
0
0
0
0
0
1
y = 1
1
x_ =
1
1
0
0
0
0
0
1
0
0
0
0
[1 ]
0
0
0
0
2
1
2
0
0
0
0
0
0
0
[ 1 ]
0
2
0
0
0
0
0
0
2 0
3
0
0
0
0
0 x +
0
2 1
0 2
2 1
1 1 x:
2 0
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
0
0
0
0
1
0
1
0
1
1
0
1
0
0
1
1
2
1
1
0
0
0
1
3
0
1
u
Índices de Observabilidad
Descomposiciones canónicas
La inversa (sI
directamente
(sI
J) 1 =
Controlabilidad y observabilidad en forma modal
1
0
0
0
0
0
0
(s
1
1 )2
1
s 1
0
0
0
0
0
1
0 0
0 0
s 1
0
1
s 1
0 0
0 0
0 0
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4
0
1
s 2
0
0
0
0
0
0
0
0
0
0
(s
1
2 )2
1
s 2
0
0
0
0
0
1
2 )3
(s
2 )2
1
1
s 2
Controlabilidad y observabilidad en forma modal
10
0
9
0
x +
0
0
1
0 0 0
2
y = 1 0 0 2 x:
0 1 0
(s
Descomposiciones canónicas
Ejemplo: Consideremos las ecuaciones de estado en forma
modal
J ) en el sistema del ejemplo puede escribirse
s 1
Índices de Observabilidad
:
0 0 1
x_ =
0 0 0
Hay dos bloques de Jordan, uno de orden 3 asociado al
autovalor 0, y otro de orden 1 asociado al autovalor 2. La
entrada de B correspondiente a la última fila del primer bloque
de Jordan es 0; la ecuación de estado no es controlable. Las
dos entradas de C correspondientes a las primeras columnas
de los dos bloques de Jordan son no nulas; el sistema es
observable.
Virginia Mazzone: Tema 6: Controlabilidad y Observabilidad Parte 3 / 4