Caso Resuelto 3 Enero 2012
Anuncio

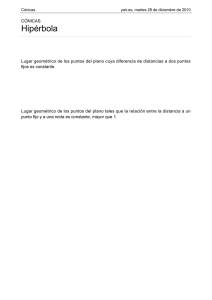
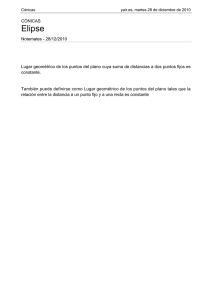
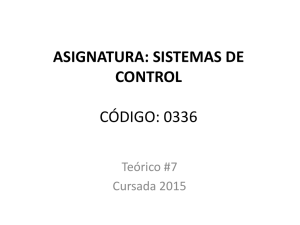
Caso Resuelto 3 Análisis en el Dominio del Tiempo con Lugar Geométrico de las Raíces (Ayuda de Program CC) Introducción El Análisis en el Dominio del Tiempo se refiere a un desarrollo donde a un sistema de control automático lineal se determinan, en base a un parámetro de análisis, los Tiempos Transitorios Tiempo de Respuesta TR, Tiempo de Subida TP, Tiempo de Alcance Máximo TA, Tiempo de Asentamiento TS, el % de Sobrepaso y el % de Error de Estado Estable. Para realizar este desarrollo se acude a la técnica de polos dominantes que desprecia el efecto de los polos de lazo cerrado (raíces de la ecuación característica) negativos más grandes tomando en cuenta solo el efecto de los dos polos de lazo cerrado más cercanos al origen del plano “s” y se utilizan las formulas desarrolladas para análisis en el dominio del tiempo de sistemas de segundo orden Ec. (1) a Ec. (6), basadas en los diagramas de la Figura 1 y Figura 2. TR = (1) 1 δω n π −β ωn 1− δ 2 π TA = ωn 1− δ 2 (2) TP = TS = Fig. 1 Polos de Lazo Cerrado de un Sistema de Segundo Orden Fig. 2 Diagrama de Bloques y Función Transferencia de Sistemas de Segundo Orden (3) (4) 4 δω n %Sobrepaso = 100eπδ 1−δ 2 (5) Una forma simple de determinar los polos dominantes y los parámetros Ganancia del Sistema K, Frecuencia Natural ω n , y Razón de Amortiguamientoδ, es auxiliarse del Lugar Geométrico de las Raíces de forma semejante a la Figura 1. Planteamiento de un Ejemplo Se desea realizar el Análisis en el Dominio del Tiempo de un Sistema de Control Retroalimentado que tenga como función de transferencia de lazo abierto de la planta, actuadores y transductor la mostrada en Ec.(7), para una δ=0.45. GH ( s ) = k s (s + 2 )(s + 4 )(s + 6 ) (7) Solución del Ejemplo La solución del ejemplo inicia con la decisión de la forma de realizar el análisis en el dominio del tiempo, en segundo lugar se determina cual de las herramientas disponibles se utilizará; en este caso se realizara un análisis en el dominio del tiempo utilizando la técnica de polos dominantes y auxiliándonos Program CC para graficar. Casos Resueltos de Ingeniería de Control Para poder iniciar con el análisis del comportamiento actual del sistema encontrando su punto de operación para una δ = 0.45 y β = 63.25° , Ec(8), en el Lugar Geométrico de las Raíces para medir los parámetros ω n y K y con estos calcular los Tiempos Transitorios Tiempo de respuesta TR, Tiempo de Subida TP, Tiempo de Alcance Máximo TA y Tiempo de Asentamiento TS, % de Sobrepaso y % de Error de Estable. β = Cos −1δ = Cos −1 0.45 = 63.25 = 1.1rad (8) Para construir la Gráfica del Lugar Geométrico de las Raíces se utilizara Program CC en la Figura 3 donde se muestra el procedimiento para su construcción, la Gráfica y el punto de operación para β Ec. (2) el Program CC toma la posición mostrando el valor de la razón de amortiguamiento δ y esta marcado por el cursor que da información en la parte inferior. CC>GH1=1/(s*(s+2)*(s+4)*(s+6)) CC>GH1 1 GH1(s) = ———————— s(s+2)(s+4)(s+6) CC>rootlocus(GH1) Fig. 3 Lugar Geométrico de las Raíces del sistema construido en Program CC Caso Resuelto 3 Una vez construida la Gráfica del Lugar Geométrico de las Raíces y encontrado el punto de operación se miden la Ganancia k = 43.73 y la Frecuencia Natural ωn = 1.185 rad . seg . del punto de operación, con estos datos se procede a calcular los tiempos transitorios de las Ec. (9) a Ec. (12) para compararlos con los medidos en la Gráfica de Respuesta en el Tiempo del Sistema Figura 4. 2 M.C. Manuel Amarante Rodríguez 13 de Diciembre del 2011 Caso Resuelto 3: Análisis en el Dominio del Tiempo con Lugar geométrico de las Raíces (Ayuda de Program CC) TR = TP = TP = 1 δω n = 1 = 1.813seg. 0.45 *1.18 π −β π − 1.1 = = 1.937 seg. ω n 1 − δ 2 1.18 1 − 0.452 π ωn 1 − δ 2 TS = 4 δω n = = π 1.18 1 − 0.452 = 2.981seg. 4 = 7.523seg. 0.45 *1.18 (9) (10) (11) (12) CC>GH2=GH1*43.73 CC>GH2 43.73 GH2(s) = ——————— s(s+2)(s+4)(s+6) CC>time(GH2) CC>C2=GH2/(1+GH2) CC>C2 43.73 C2(s) = —————————————— s^4 +12s^3 +44s^2 +48s +43.73 CC>time(C2) M.C. Manuel Amarante Rodríguez 13 de Julio del 2011 3 Casos Resueltos de Ingeniería de Control Fig. 4 Respuesta en el Tiempo del sistema construido en Program CC Caso Resuelto 3 4 M.C. Manuel Amarante Rodríguez 13 de Diciembre del 2011