Slides 3 Archivo
Anuncio

GEOESTADISTICA
Parte 2: prediccion espacial
2015
Objectivos
{Z(s), s ∈ D ⊂ Rd } campo aleatorio
observamos z(s1 ), z(s2 ), . . . , z(sn ) en los sitios s1 , s2 , . . . , sn
Estimar (predecir) g(Z(s)), s ∈ D.
Por ejemplo :
Z(s0 ), s0 no observado,
Z
1
Z(s)ds B region de D,
|B| B
P (Z(s) > ζ),
...
Predictor optimo
Predecir Z(s0 ) dados Z(s1 ) = z(s1 ), . . . , Z(sn ) = z(sn )
Predictor optimal :
popt = E Z(s0 )/Z(s1 ) = z(s1 ), . . . , Z(sn ) = z(sn )
minimiza el riesgo quadratico
b 0 ))2
E (Z(s0 ) − Z(s
Predictor lineal optimo (BLUP) :
∗
p =α+
n
X
λi Z(si )
i=1
Si Z gaussiano, popt = p∗
Solucion
λ = C −1 c
Ci,j = cov Z(si ), Z(sj )
n
X
α = E(Z(s0 )) −
λi E(Z(si ))
i=1
ci = cov Z(s0 ), Z(si )
Kriging simple
C y m(s) conocidas
t
−1
\
Z(s
(Z − m) + m(s0 )
0 ) = cC
Varianza de kriging
2
σSK
= σ 2 (s0 ) −t cC −1 c
Si s0 = si , entonces
[i ) = Z(si )
Z(s
Necesita estimar C y m(s).
Kriging Ordinario
Hypotesis : Z(s) = µ + δ(s), con incrementos estacionarios.
n
X
b 0 )) =
Z(s
λi Z(si ) con
i=1
b 0 )) = E(Z(s0 )) y E(Z(s
b 0 ) − Z(s0 ))2 minimo
E(Z(s
1
variograma : γ(h) = Var(Z(s + h) − Z(s))
2
(λi )i=1,n soluciones del sistema
0
γ(s1 − s2 ) . . . γ(s1 − sn )
γ(s1 − s2 )
0
. . . γ(s2 − sn )
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
γ(s1 − sn ) γ(s1 − sn ) . . .
0
1
1
...
1
1
λ1
γ(s0 − s1 )
1
λ2 γ(s0 − s2 )
. . . . . =
...
1
λn
γ(s0 − sn )
0
α
1
Kriging Ordinario
Varianza de kriging
2
σK
(s0 )
b 0 ) − Z(s0 ))2 ) = α +
= E((Z(s
n
X
λi γ(si − s0 )
i=1
Comentarios
i) No es necesario que 0 ≤ λi ≤ 1
2 (s ) = 0
ii) si s0 ∈ {s1 , . . . sn } entonces λi = 1, λj = 0, j 6= i, y σK
i
iii) los pesos de kriging λi dependen de la disposicion de los lugares
de los datos, de la localizacion del sitio de prediccion, del numero
de datos y de la funcion variograma.
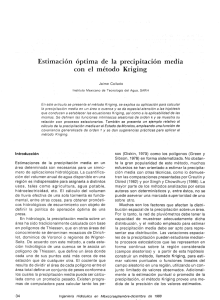
Pesos de kriging
Efecto pantalla
0.662
●
0.338
●
●
A
B
0.447
●
A
●
0.43
0.123
●
●
C
B
Pesos de kriging
Declustering natural
0.5
●
●
0.264
0.264
●●
●
●
●
0.5
0.472
Pesos de kriging
Effet écran et pondérateurs négatifs
−0.146
0.713
−0.491
●
●
●
D
G
0.244
●
●
A
E
0.737
−0.026
●
●
B
C
−0.031
●
F
0.032
0.037
●
●
D
E
0.26
0.76
−0.128
●
●
●
A
●
B
C
0.039
●
F
Influencia de los parametros del variograma
La pepita
1
, la prediccion es
n
constante (menos a los sitios de los datos) asi como la varianza de
kriging.
- si τ 2 = 0, la regularidad del variograma en 0 da la regularidad del
proceso
- la presencia de una pepita en la funcion variograma alisa la
prediccion.
El rango
- efecto pantalla
El silo
- influenza la varianza de kriging.
- si el variograma es solo una pepita λi =
Influencia de los parametros del variograma
Forme du variogramme
krigeage
z
1
2
3
4
5
●
−1
0
1
2
h
s
Gaussien
krigeage
z
2
3
4
−0.5 0.5
0.6
1
5
4
3
4
3
4
●
−1
0
1
2
h
s
Sphérique
krigeage
1.2
0
z
0
1
2
3
h
4
5
−0.5 0.5
0.6
●
0.0
γ
3
●
0.0
γ
1.2
0
−0.5 0.5
0.6
●
0.0
γ
1.2
Exponentiel
●
−1
0
1
2
s
Influencia de los parametros del variograma
Variogrammes puissance
krigeage
0.0 1.0 2.0
z
0
1
2
3
4
−0.5 0.5
●
5
●
−1
0
1
2
h
s
Puissance α=1
krigeage
3
4
3
4
3
4
z
γ
2
0
1
2
3
4
5
●
−1
0
1
2
h
s
Puissance α=1.5
krigeage
●
4
γ
z
8
0
−0.5 0.5
4
●
0.5 2.0
γ
Puissance α=0.5
0
−1.5
●
0
1
2
3
h
4
5
−1
0
1
2
s
Influencia de los parametros del variograma
Influence de la pépite
variance
σ2
0.5
−0.5
●
−1
0
0.0
z
●
1.5
3.0
pepite = 0
1
2
3
4
−1
0
●
●
1
2
s
σ2
0.0
2
3
4
−1
2
s
4
1.5
σ2
1
3
3.0
variance
0.0
z
●
2
pepite=1
0.5
−0.5
●
1
s
●
0
0
s
●
−1
4
1.5
0.5
z
−0.5
●
1
3
variance
●
0
4
3.0
pepite=0.5
−1
3
s
3
4
−1
0
●
●
1
2
s
Influencia de los parametros del variograma
Influence de la portée
portée = 0.5
variance
0
1.0
σ2
●
−1
0.0
z
−0.5 0.5
●
1
2
3
4
−1
0
1
s
2
3
4
3
4
3
4
s
portée= 1
variance
0
1.0
σ2
●
−1
0.0
z
−0.5 0.5
●
1
2
3
4
−1
0
1
s
2
s
portée = 2
variance
0
1.0
σ2
●
−1
0.0
z
−0.5 0.5
●
1
2
s
3
4
−1
0
1
2
s
Kriging de una media regional
V parte de D
1
Zv =
|V |
cV =
Z
n
X
Z
Z(s)ds
V
λi Z(si )
i=1
Λ
−1 γ(V, si )
=Γ
α
1
1
γ(V, si ) =
|V |
2
σOK
(V ) =
Z
γ(si − s)ds
V
X
i
λi γ(V, si )+α−γ(V, V )
Kriging log-normal
Si los datos no siguen una distribucion normal, la prediccion dada
por el kriging no es la del predictor optimo.
Z ∼ log-normal si Y = log(Z) ∼ N (µ, σ) y
E(Z) = exp(µ + σ 2 /2).
Si Y (s) = log(Z(s)) gaussiano con incrementos estacionarios
n
n
X
X
Yb (s0 ) =
λi Y (si ) =
λi log(Z(si ))
i=1
i=1
El kriging log-normal de Z es
b 0 ) = exp Yb (s0 ) + σ 2 (s0 )/2 − αY
Z(s
Y,K
Kriging Universal
Si la media no es constante
Z(s) = µ(s) + δ(s)
δ con incrementos estacionarios E(δ) = 0
Modelization de la tendencia E(Z(s)) = µ(s),
p+1
X
µ(s) =
βj−1 fj−1 (s)
j=1
fj funciones conocidas en cada s, (βj ) desconocidos
β0
δ(s1 )
Z(s1 )
f0 (s1 ) . . . fp (s1 )
..
. .
. = . . . . . . . . . . . . . . .. + ..
f0 (sn ) . . . fp (sn )
Z(sn )
βp
δ(sn )
Z = Xβ + δ
Kriging Universal
b 0) =
Predictor lineal Z(s
n
X
λi Z(si )
i=1
Restriccion insesgado (universalidad):
t λX
=t x , t x = (f0 (s0 ), . . . , fp (s0 ))
γ variograma de δ
0
. . . γ(s1 − sn ) f0 (s1 )
. . . . . . . . . . . . . . . . . . . . . . . . . . .
γ(s1 − sn ) . . .
0
f0 (sn )
f0 (s1 )
.
.
.
f
(s
)
0
n
. . . . . . . . . . . . . . . . . . . .
fp (s1 )
...
fp (sn )
λ
γ(s − s )
. . . fp (s1 ) .1 0 . 1
..
.
. . . . . . . . .
.
. . . fp (sn )λn γ(s0 − sn )
α0 = f0 (s0 )
..
..
0
.
.
varianza de kriging :
p+1
n
X
X
2
σKU (s0 ) =
λi γ(s0 − si ) +
αj−1 fj−1 (s0 )
i=1
j=1
αp
fp (s0 )
Kriging Universal
Estimacion del variograma de δ
p+1
X
2
1
1
(δ(si )−δ(sj ))2 = Z(si )−Z(sj )−
βk−1 (fk−1 (si )−fk−1 (sj ))
2
2
k=1
Necesita estimar los βi . Para estimar las βi
βb = (X t Σ−1 X)−1 X t Σ−1 Z
Σ = cov(δ)
Procedimiento iterativo :
-
estimar β con minimos cuadrados ordinarios,
ajustar el variograma con los residuos,
estimar β con minimos cuadrados generalizados,
...
Cokriging
2 procesos espaciales Z1 (.), Z2 (.)
(sik , k = 1, ni ) sitios de datos observados del proceso Zi .
caso isotopico s1k = s2k = sk
caso heterotopico los lugares no coinciden en absoluto (total),
parcialmente (parcial)
Hypotesis de estacionaridad:
• E Zi (s) = µi , cov(Zi (s), Zj (s + h)) = cij (h)
• si Z isotropico cij (h) = cij (khk)
Obtenemos
• cij (h) = cji (−h)
• |cij (h)| ≤
p
cii (0)cjj (0)
Cokrigeage
Estacionnaridad junta de los incrementos
• E(Zj (s + h) − Zj (s)) = 0,
• cov(Zi (s + h) − Zi (s), Zj (s + h) − Zj (s)) = 2γij (h)
Variograma cruzado
γij (h) = cij (0) − 21 (cij (h) + cij (−h)) si es estacionario
Pseudo-variograma cruzado
γ
eij (h) =
=
1
Var(Zi (s + h) − Zj (s))
2
1
(cii (0) + cjj (0)) − cij (−h) si es estacionario
2
Cokriging
Predictor lineal
Zb1 (s)−µ1 (s) =
n1
X
n2
X
λ1k (Z1 (s1k )−µ1 (s1j ))+
λ2k (Z2 (s2k )−µ2 (s2j ))
k=1
k=1
b1 (s) − Z1 (s))2 sujeto a restriccion
Minimizar E(Z
E(Zb1 (s) − Z1 (s)) = 0
nj
2 X
X
λjl γij (sik − sjl ) + αi = γ1i (sik − s)
j=1 l=1
n1
X
n2
X
k=1
k=1
λ1k = 1
i = 1, 2
λ2k = 0
Varianza de cokriging
2
σCO
=
ni
2 X
X
i=1 k=1
λik γ1i (sik − s) + α1
k = 1 . . . ni
Cokriging
Estimacion de los variogramas
γij (h) condicionalmente definidas negativas.
Modelos de coregionalizacion :
γij (h) =
L
X
blij γ` (h)
Γ(h) =
l=0
`=0
cada Bl tiene que ser definida positiva, i.e.
b`11 ≥ 0
;
b`22 ≥ 0
;
L
X
|b`12 | ≤
q
b`11 bl22
B` γ` (h)
Simulaciones condicionales
Principio Simular campos aleatorios segun una distribucion de
tal manera que los valores en los lugares de datos
sean iguales a los observados.
Interes Permite estimar funciones no lineales de Z.
Kriging condicional
• Estimar la funcion de covarianza del campo C(h)
b=
• Z
P
i λ i Zi
kriging con los datos observados
• simular un campo Y en el dominio D con funccion de
covarianza C(h)
b = P λi Yi kriging con los valores simulados en los sitios de
• Y
i
datos.
b + Y − Yb es una simulacion condicionnal.
• Z
Lluvias suizas
Cumuls pluviométriques en Suisse
après le passage du nuage de Tchernobyl
250
600
200
150
100
300
200
0
50
400
100
−50
Y
500
●
●
●
●
● ●●●
●● ●
● ●
●
●
●
●
●
● ●
●●
●●
●
●
●
●
●
● ●
●
●
●
●
●●
●
● ●
●
●
●
● ●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●●●
●
●
●
●
● ●●
● ●● ● ● ●
●
● ● ●
● ●
●
●
●
● ●
●
●
●
●
●
●
0
0
50
100
150
200
X
250
300
350
Lluvias suizas
250
Altitude (m)
100
3000
0
50
2000
1000
−50
y (km)
150
200
4000
0
50
100
150
x (km)
200
250
300
Lluvias suizas
250
Krigeage avec un modele exponential
200
600
500
●
●
●
●
150
●
●
●
●
●
100
●
●
50
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
300
●
●
●
●
●●
●
●
●
● ●
●
400
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
200
●
0
●
●
●
●
100
−50
y (km)
●
●
●
●
●
●
●
●
●
●
●●
●
●
●● ●
●
● ●
●
●
0
0
50
100
150
x (km)
200
250
300
Lluvias suizas
250
Ecart−type de krigeage
200
120
150
100
100
0
50
60
40
−50
y (km)
80
20
0
50
100
150
x (km)
200
250
300
Lluvias suizas
250
Krigeage avec un modele exponential anisotrope
200
600
500
●
●
●
●
150
●
●
●
●
●
100
●
●
50
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
300
●
●
●
●
●●
●
●
●
● ●
●
400
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
200
●
0
●
●
●
●
100
−50
y (km)
●
●
●
●
●
●
●
●
●
●
●●
●
●
●● ●
●
● ●
●
●
0
0
50
100
150
x (km)
200
250
300
Lluvias suizas
250
Krigeage avec un modele exponential avec l'altitude
200
600
500
●
●
●
●
150
●
●
●
●
●
100
●
●
50
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
300
●
●
●
●
●●
●
●
●
● ●
●
400
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
200
●
0
●
●
●
●
100
−50
y (km)
●
●
●
●
●
●
●
●
●
●
●●
●
●
●● ●
●
● ●
●
●
0
0
50
100
150
x (km)
200
250
300
Lluvias suizas
Simulation conditionnelle
200
250
600
●
150
●
●
●
●
100
●
●
●
50
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
● ●
●
●
●
●
●
300
●●
●
●
●
400
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●● ●
●
● ●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
200
●
0
●
●
●
●
100
−50
y (km)
500
●
●
●
0
0
50
100
150
x (km)
200
250
300
Lluvias suizas
Proba(Y > 300)
200
250
1.0
●
●
●
150
● ●
●
●
●●
●
●
●
●
100
●
●
●
50
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●●
●
●
●
●
0.6
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
● ●
●
●
●
●
●
● ●
●
●
●
●
●
0.4
●
●
●
●
●
●
●
●
●
●
●
0
●
●
●
●
0.2
−50
y (km)
0.8
●
●
0.0
0
50
100
150
x (km)
200
250
300