Cap´ıtulo 4. Leyes de Newton
Anuncio

Capı́tulo 4.
Leyes de Newton
1.
El espacio y el tiempo en mecánica newtoniana
Antes de iniciar el enunciado de las leyes de Newton, hemos de establecer unos
postulados basicos que de forma implı́cita o explı́cita se aceptan en la llamada
mecánica newtoniana, Galileana o clásica
Puesto que vamos a referirnos al movimiento, es decir la variación de la posición
de una partı́cula con el tiempo hemos, antes de nada, de establecer el tipo de
espacio y tiempo a que se refiere la mecánica newtoniana. Los postulados básicos
al respecto son:
1..1
La geometrı́a del espacio es euclidiana
lo que significa que la distancia entre dos puntos del espacio se determina por el
producto escalar euclı́deo
d212 = ~r1 .~r2 = (x2 − x1 )2 + (y2 − y1 )2 + (z2 − z1 )2
(1.1)
• El espacio es homogéneo e isótropo. Es decir las leyes de la fı́sica son
las mismas en cualquier punto del espacio y en cualquier dirección. Por tanto
los resultados de un experimento han de ser independientes de la posición y la
orientación del laboratorio donde se realice.
• El tiempo es homogéneo de forma que el resultado de un experimento ha
de ser independiente del instante de tiempo en que se realice.
77
78
Capı́tulo 4
• La geometrı́a del espacio y el tiempo son absolutos y por tanto son
iguales para todos los observadores e independientes de la velocidad de los mismos.
Esta afirmación nos puede parecer obvia pero ya veremos que en la Relatividad
Einsteniana el concepto de tiempo cambia
2.
La Primera Ley
“Todo cuerpo sobre el que no actúan fuerzas se mueve con velocidad
constante y por tanto su movimiento es rectilineo e uniforme”
• En realidad esta ley es una definición de cuales son los sistemas de
referencia en los cuales se aplican las leyes de Newton. Tales sistemas
se denominan sistemas inerciales y se definen como aquellos en los que una
partı́cula sobre la que no actúan fuerzas se mueve con velocidad constante. Puesto
que las leyes de la fı́sica han de ser iguales para todos los sistemas de referencia
inerciales, no puede haber ningun experimento que nos permita medir la velocidad
absoluta de un cuerpo sino solo su velocidad con relación a un sistema de referencia
dado. Existe pues un Principio de Relatividad clásico que podemos enunciar como
sigue:
2..1
Principio de Relatividad de Galileo
“Las leyes de la fı́sica son las mismas en todos los sistemas de referencia inerciales,
es decir, en aquellos que se mueven con velocidad relativa constante”.
2..2
Transformaciones de Galileo.
No obstante nos queda por resolver el problema de como comparar los experimentos
realizados en dos laboratorios inerciales distintos. Sea un sistema de referencia
inercial S, es decir, un sistema de coordenadas {x, y, x} y un reloj que mide un
tiempo t. Sea S’ otro sistema de referencia {x0 , y 0 , z 0 }; t0 que se mueve respecto del
anterior con velocidad relativa ~vr . La transformacion mas general que liga ambos
sistemas y que respeta el que el tiempo sea absoluto (independiente de la velocidad)
y homogéneo (independencia del origen de tiempos) asi como que el espacio sea
homogéneo (independiente del origen) e isótropo (invariante bajo rotaciones) es la
conocida como transformacion de Galileo.
~ 0 + ~vr t + R~r
~r0 = R
(2.1)
t0 = t + t0
(2.2)
Leyes de Newton
79
donde R es una matriz de rotaciones. Hay pues 10 formas distintas de conectar dos sistemas de referncia inerciales correspondientes a los 10 parámetros que
~ 0 , las tres
aparecen es las transformaciones de Galileo: las tres componentes de R
componentes de ~vr , las tres componentes de R y t0 .
2..3
Conservación de los intervalos espaciales
Por simplicidad, haremos la demostracion en una dimensión.
Supongamos que en mismo instante de tiempo t2 = t1 medimos en S la distancia
entre dos puntos x2 − x1 . Un observador en S’ medirá:
t02 − t01 = t2 − t1 = 0
x02
−
x01
= x2 − x1 + vr (t2 − t1 ) = x2 − x1
(2.3)
(2.4)
de manera que la distancia entre dos puntos es independiente del observador
2..4
Conservación de los intervalos temporales
Supongamos que en mismo punto x2 = x1 medimos en S el tiempo transcurrido
entre dos sucesos t2 − t1 . Un observador en S’ medira:
t02 − t01 = t2 − t1
(2.5)
x02 − x01 = vr (t2 − t1 )
(2.6)
de manera que el tiempo transcurrido entre los dos sucesos es el mismo para los
dos observadores.
3.
La Segunda Ley
Esta ley establece la relación existente entre el movimiento de un cuerpo y las
fuerzas que actúan sobre él y se expresa en la forma
F~ = mi~a
o bien
(3.1)
d~p
F~ = mi
(3.2)
dt
donde p~ = mi~v es el momento lineal de la partı́cula
Por tanto la segunda ley establece que la relación entre la fuerza aplicada a un
cuerpo y la aceleración que le imprime es una constante caracterı́stica del cuerpo
que se denomina masa inercial. Un problema que nos plantea la segunda ley es
la definición o mas bien la medida de la masa inercial. En efecto la segunda ley
nos permite definir la fuerza una vez que suponemos conocida mi , pero ¿Como
determinar mi de forma independiente?.
80
3..1
Capı́tulo 4
Principio de equivalencia
La forma habitual de medir la masa es “pesándola”, es decir calculando la fuerza
gravitatoria que la tierra ejerce sobre ella. Como sabemos, tal fuerza es (en módulo)
Fg = G
Mg mg
d2
(3.3)
que establece que la fuerza gravitacional entre dos cuerpos es directamente proporcional al producto de unas constantes caracteristicas de los mismos que denominaremos masa gravitacional. Aunque la masa inercial y la masa gravitacional
tienen las mismas dimensiones, no hay ninguna exigencia en la teorı́a que establezca
que han de ser iguales. La masa gravitacional es una constante que “provoca” la
interacción puramente gravitacional mientras que la masa inercial determina como
se aparta un cuerpo de la inercia bajo la accion de una fuerza arbitraria. No obstante, todos los experimentos realizados hasta la fecha (experimento de Eötvos)
establecen la igualdad numérica entre la masa inercial y la masa gravitacional.
Este resultado se conoce como Principio de equivalencia y nos permite eliminar
los subı́ndices de las masas en lo sucesivo.
3..2
Principio de determinación
(puede resultar conveniente omitirlo por el momento puesto que no saben nada de
ecuaciones diferenciales)
Otra consecuencia importante de la segunda ley surge al observar que la ecuación
(3.1) es una ecuacion diferencial de segundo orden de la forma
m
d2~r
= F (~r, ~˙r)
dt2
(3.4)
Para obtener una solucion partı́cular de esta ecuación necesitamos 6 constantes
arbitrarias que equivalen a conocer las posición y velocidad de la partı́cula en un
instante determinado, A la inversa podemos decir que: “La posición y velocidad
de una partı́cula en un instante dado (condiciones iniciales)determinan totalmente
su posición y velocidad en cualquier otro instante”. En este sentido la mecánica
clásica es totalmente determinista. Otro problema distinto es la incapacidad de
nuestros instrumentos de medir la posición y la velocidad con precision absoluta.
Habra siempre un margen de error en las medidas de las condiciones iniciales. Para
algunos sistemas el margen de error se mantiene acotado (sistemas integrables).
Por el contrario, una gran sensibilidad del sistema a estos errores hace que , en la
practica, sea imposible calcular la trayectoria que seguira la partı́cula ni siquiera
con el mismo margen de error que las condiciones iniciales. Se dice en tal caso que
el sistema es caótico aunque sea determinista
Leyes de Newton
4.
81
La Tercera Ley
A cada acción se opone una fuerza igual y de sentido contrario. Por tanto si F~12
es la fuerza que la partı́cula 1 ejerce sobre la 2 y F~21 la que la partı́cula 2 ejerce
sobre la 1, entonces:
F~12 = −F~21
(4.1)
si además las fuerzas estan dirigidas a lo largo de la recta que une las dos partı́culas,
hablaremos de la version fuerte de la tercera ley.
Sobre esta ley trataremos mas extensamente cuando hablemos de sistemas de
partı́culas.
5.
Sistemas de referencia no inerciales
Aunque trataremos el tema ampliamente más adelante, conviene decir aqui algo
sobre el uso de los sistemas de referencia no inerciales.
Hay que señalar en primer lugar que las leyes de Newton se refieren solamente
a sistemas inerciales, es decir a observadores que se mueven con velocidad relativa
constante. Si el observador, es decir el sistema de referencia, esta acelerado, las
leyes de Newton dejan de aplicarse a tal sistema. No obstante los sistemas de
referencia no inerciales pueden ser muy útiles. A veces incluso, puede ser imposible
utilizar otro sistema. Este es el caso de un observador sobre la tierra: La tierra
gira sobre si misma y alrededor del sol (aparte de los movimientos del sistema solar
y la galaxia) y es por tanto un sistema no inercial. Para todos los experimentos
realizados sobre la tierra convendrá saber como hay que modificar las leyes de
Newton de forma que se adapten a tal sistema.
Supongamos que ~a0 es la aceleración de la tierra (es decir del observador no
inercial) respecto a un observador no inercial. Si ~ani es la aceleración de una
partı́cula medida desde la tierra, la aceleración medida por el observador inercial
será ~ai = ~ani + ~a0 . De manera que si sobre la partı́cula actúa una fuerza F~ , el
observador inercial (que es para el que valen las leyes de Newton) podra aplicar la
segunda ley de Newton, es decir:
F~ = m~ani + m~a0
(5.1)
mientras que el observador no inercial detectará una aceleración dada por:
m~ani = F~ − m~a0
(5.2)
de manera que en un sistema inercial la segunda leyde Newton es válida a condición
de introducir una “falsa fuerza”o “pseudofuerza” F0 = −m~a0 que de cuenta de la
no inercialidad del sistema de referencia.
82
Problemas del Tema IV
Capı́tulo 4
(11-11-2008)
1.) Dos bloques, de masa m1 y m2 están unidos mediante un resorte ligero en una
mesa horizontal sin rozamiento. Obtener la relación de sus aceleracioenes a1 y a2
después que se separan un poco y luego se sueltan.
2.) Un viajero espacial cuya masa es 75 kg sale de la tierra. Calcular su peso a)
En la tierra b) a 644 km de la tierra. c) en el espacio interplanetario. ¿Cúal es su
masa en cada uno de estos sitios?.
3.) Una esfera cargada de 0, 3 gr. está suspendida de una cuerda. Sobre la esfera
obra una fuerza eléctrica horizontal de manera que la cuerda forma un ángulo de
370 con la vertical cuando está en reposo. Encontrar a) La magnitud de la fuerza
eléctrica. b) La tensión de la cuerda.
4.) Calcular la aceleración inicial ascendente de un cohete de 1, 3.104 kg si la
fuerza inicial de su motor es 2, 6.106 kg.m/sg 2 . ¿Se puede pasar por alto el peso
del cohete?.
5.) Un hombre de 80 kg de masa se encuentra en un ascensor. Determinar la
fuerza que ejerce el suelo sobre él en los siguientes casos: a) El ascensor sube con
velocidad constante. b) El ascensor baja con velocidad constante. c) El ascensor
sube con aceleración de 3 sm2 . d) El ascensor baja con aceleración de 3 sm2 .
6.) Un atleta parado lanza la jabalina a 60 m. ¿Qué distancia puede alcanzar si
la lanza corriendo a 8 ms ?
7.) Supongamos una mesa circular de radio R que gira con velocidad angular ω
alrededor de su centro. Una partı́cula de masa m está sujeta al eje de rotación
por una varilla de longitud l que hace que la masa gire junto con la mesa. En
el instante t = 0 la varilla se rompe. Describir el movimiento de la masa para
un obsevador situado en el centro de la mesa en los siguientes casos: a) Que el
observador sea inercial y respecto a él la mesa gire con velocidad ω. b) Que el
observador gire con velocidad ω y respecto de él la mesa esté en reposo.
Leyes de Newton
83
8.) Determinar las tensiones y las aceleraciones de las siguientes máquinas
• 8.a)
• 8.b)
• 8.c)
m1
h
F
• 8.d)
m2
84
Capı́tulo 4
• 8.e)
m2
m1
• 8.f)
m2
m1
• 8.g)
m2
m1
9.) Una cadena flexible de longitud l y masa M se coloca como indica la figura.
Si a t = 0 BC es el doble de AB y la cadena tiene velocidad cero, determinar la
posición y la velocidad de la cadena en cualquier otro instante.
A
B
C
Leyes de Newton
85
10.) Determinar la velocidad de la cuerda de la figura si empieza a resbalar cuando
sus 2/3 se encuentran a la derecha.
11.) Una serie de alambres rectos se colocan formando abanico con un vértice
común A como indica la figura. En cada alambre se se ensarta una cuenta. En
un mismo instante se dejan caer todas las cuentas desde A. Calcular el lugar
geométrico de las posiciones de las cuentas al cabo de un tiempo t
12.) Una Cadena se coloca sobre una mesa como indica la figura y se suelta.
Calcular el tiempo que tarda en abandonar la mesa
4/5 L
86
Capı́tulo 4
6.
Problemas
1.) Dos bloques, de masa m1 y m2 están unidos mediante un resorte ligero en una
mesa horizontal sin rozamiento. Obtener la relación de sus aceleracioenes a1 y a2
después que se separan un poco y luego se sueltan.
Solución
La fuerza que actúa es de acción y reacción. Por tanto
F = m1 ẍ1 = m1 a1
−F = m2 ẍ2 = m2 a2
luego
a2
m1
=−
a1
m2
Leyes de Newton
87
2.) Un viajero espacial cuya masa es 75 kg sale de la tierra. Calcular su peso a)
En la tierra b) a 644 km de la tierra. c) en el espacio interplanetario. ¿Cúal es su
masa en cada uno de estos sitios?.
Solución
La fuerza de la gravedad es (en módulo):
F =G
mM
(R + d)2
donde M es la masa de la tierra, R el radio de la tierra y d la distancia a la que se
encuentra de la superficie de la tierra.
a) En la tierra
Fo = G
mM
= mg =⇒ F0 = 75 kg.9, 8m/sg 2 = 735kg.m/sg 2
R2
b) a 644 km de la tierra
mM
F =G
= F0
(R + d)2
µ
R
R+d
Ã
¶2
= F0
1
1+
Como el radio de la tierra es:6, 37.103 km
F = F0 .0, 81 = 595, 35 kg.m/sg 2
c) en el espacio interplanetario
En este caso d → ∞ y por tanto
F =0
La masa es la misma siempre
!2
d
R
=
88
Capı́tulo 4
3.) Una esfera cargada de 0, 3 gr. está suspendida de una cuerda. Sobre la esfera
obra una fuerza eléctrica horizontal de manera que la cuerda forma un ángulo de
370 con la vertical cuando está en reposo. Encontrar a) La magnitud de la fuerza
eléctrica. b) La tensión de la cuerda.
Solución
37º
T
Fe
mg
Sea θ = 370 . Puesto que está en reposo, el balance de fuerzas debe ser cero
T~ + F~e + m~g = 0
donde
T~ = −T sin θ~i + T cos θ~j
F~e = Fe~i
m~g = −mg~j
de forma que
T cos θ = mg
T sin θ = Fe
luego
tg θ =
Fe
=⇒ Fe = mg tg θ
mg
y
T =
mg
cos θ
Leyes de Newton
89
4.) Calcular la aceleración inicial ascendente de un cohete de 1, 3.104 kg si la
fuerza inicial de su motor es 2, 6.106 kg.m/sg 2 . ¿Se puede pasar por alto el peso
del cohete?.
Solución
El balance de fuerzas serı́a
Fi~j − mg~j = ma~j
luego
a=
o sea
a=
Fi
−g
m
2, 6.106 kg.m/sg 2
− 9, 8 m/sg 2 = (2, 0.102 − 9.8)m/sg 2
1, 3.104 kg
luego la masa del cohete se puede pasar por alto hasta precisiones del orden de la
centésima. En tal caso
Fi
a'
= 2, 0.102 m/sg 2
m
90
Capı́tulo 4
5.) Un hombre de 80 kg de masa se encuentra en un ascensor. Determinar la
fuerza que ejerce el suelo sobre él en los siguientes casos: a) El ascensor sube con
velocidad constante. b) El ascensor baja con velocidad constante. c) El ascensor
sube con aceleración de 3 sm2 . d) El ascensor baja con aceleración de 3 sm2 .
Solución
a-b) Si sube o baja con velocidad constante, es un sistema inercial. Por tanto,
el balance de fuerzas es:
~ − mg~j = 0 =⇒ R = mg = 784 N t.
R
c) En este caso
~ − mg~j = ma~j =⇒ R = m(g + a) = 1024 N t
R
c) Ahora la aceleración es negativa
~ − mg~j = −ma~j =⇒ R = m(g − a) = 544 N t
R
Leyes de Newton
91
6.) Un atleta parado lanza la jabalina a 60 m. ¿Qué distancia puede alcanzar si
la lanza corriendo a 8 ms ?
Solución
• Supongamos que está parado
x = vox t
1
y = voy t − gt2
2
Como sabemos, el ángulo óptimo es π/4, por tanto vox = voy 0 =
2voy
T =
=
g
X=
es el alcance máximo.
√
2vo
g
2voy vox
v2
= o
g
g
p
√
gX = 686m/sg
s
2X p
T =
= 12, 2sg
g
vo =
Si corre a 8m/sg, en ese tiempo recorre una distancia
p
x1 = 8 12, 2 m
más que si está parado
vo
√
2
92
Capı́tulo 4
7.) Supongamos una mesa circular de radio R que gira con velocidad angular ω
alrededor de su centro. Una partı́cula de masa m está sujeta al eje de rotación
por una varilla de longitud l que hace que la masa gire junto con la mesa. En
el instante t = 0 la varilla se rompe. Describir el movimiento de la masa para
un obsevador situado en el centro de la mesa en los siguientes casos: a) Que el
observador sea inercial y respecto a él la mesa gire con velocidad ω. b) Que el
observador gire con velocidad ω y respecto de él la mesa esté en reposo.
Solución
a) Para un observador inercial:
• a.1) t ≤ 0. La varilla gira con velocidad ω debido a una fuerza centrı́peta que
le obliga a describir una circunferencia
~r = R(cos ωt~i + sin ωt~j)
~v = ω(− sin ωt~i + cos ωt~j)
~a = −ω 2 (cos ωt~i + sin ωt~j) = −ω 2~r
luego sobre la partı́cula está actuando una fuerza
F~ = m~a = −mω 2~r
• a.2) t = 0
~r = R~i,
~v = ωR~j,
~a = −ω 2 R~i
• a.3) t ≥ 0 A partir de ese momento no hay fuerza que obligue a la varilla a
girar por lo que sigue un movimiento uniforme con las condiciones iniciales dadas
en a.2). Por tanto
~r = ~r0 + ~v0 t = R~i + Rωt~j
Leyes de Newton
93
b) Para un observador no inercial:
~ini = cos(ωt)~i + sin(ωt)~j
~jni = − sin(ωt)~i + cos(ωt)~j
~i = cos(ωt)~ini − sin(ωt)~jni
~j = sin(ωt)~ini + cos(ωt)~jni
• b.1) t ≤ 0. La varilla está en reposo respecto de la mesa
~rni = R~ini
~vni = 0
~ani = 0
luego “es como si actuara una fuerza centrı́fuga” que compensa F~ de forma
que;
m~ani = F~ + F~ni = 0
Por tanto“es como si” actuara una “pseudofuerza” de inercia
F~ni = −F~ = mω 2~r = mω 2 R~ini
• b.2) t ≥ 0 Al romperse la varilla, F~ = 0. La posición de la partı́cula pasada a
coordenadas no inerciales es:
³
´
³
´
~
~
~
~
~rni = R cos(ωt)ini − sin(ωt)jni + Rωt sin(ωt)ini + cos(ωt)jni
~rni = R (cos(ωt) + ωt sin(ωt))~ini + R (− sin(ωt) + ωt cos(ωt)) ~jni
de forma que la velocidad y aceleración que mide el observador no inercial son:
~vni = Rω 2 t (cos(ωt))~ini + Rω 2 t (− sin(ωt)) ~jni
~ani = Rω 2 (−ωt sin(ωt) + cos(ωt))~ini + Rω 2 (−ωt cos(ωt) − sin(ωt)) ~jni
por lo que “aparentemente” para él existe una fuerza
F~ni = mRω 2 (−ωt sin(ωt) + cos(ωt))~ini + mRω 2 (−ωt cos(ωt) − sin(ωt)) ~jni
que obliga ala partı́cula a moverse en la trayectoria (acelerada respecto del observador no inercial ) ~rni
94
Capı́tulo 4
8.) Determinar las tensiones y las aceleraciones de las siguientes máquinas
• 8.a)
• Vectores posición
~r1 = (0, −y1 )
~r2 = (0, −y2 )
• Fuerzas
F~1 = (0, T − m1 g)
F~2 = (0, T − m2 g)
• Ligadura
y1 + y2 = l
• Ecuacciones del movimiento
T − m1 g = −m1 y¨1
T − m2 g = −m2 y¨2 = m2 y~¨1
•
m1 − m2
g
m1 + m2
2m1 m2
g
T =
m1 + m2
ÿ1 =
Leyes de Newton
95
• 8.b)
• Vectores posición Tomamos como vectores unitarios la direccin del plano
inclinado y la vertical
~r1 = (0, −y1 )
~r2 = (0, −z2 )
• Fuerzas
F~1 = (0, T − m1 g)
F~2 = (0, T − m2 g)
• Ligadura
y1 + z2 = l
• Ecuaciones del movimiento
T − m1 g = −m1 y¨1
T − m2 g sin α = −m2 z¨2 = m2 y~¨1
•
ÿ1 =
T =
Obviamente para α =
π
2
m1 − m2 sin α
g
m1 + m2
(1 + sin α)m1 m2
g
m1 + m2
se recupera el caso 8.a)
96
Capı́tulo 4
• 8.c)
m1
h
F
m2
• Vectores posición
~r1 = (0, −y1 )
~r2 = (−x2 , −h)
• Fuerzas
F~1 = (0, T − m1 g)
F~2 = (0, T − F )
• Ligadura
x2 + y 1 + h = l
• Ecuaciones del movimiento
−m1 g + T = −m1 ÿ1
−F + T = −m2 ẍ2
•
ÿ1 =
T =
m1 g − F
m1 + m2
(F + m1 g)m2
m1 + m2
• Es una máquina de Atwood donde m2 g se sustituye por F
Leyes de Newton
97
• 8.d)
• Vectores posición
~r1 = (0, −y1 )
~r2 = (0, −y2 )
~r3 = (−x3 , −h)
• Fuerzas
F~1 = (0, T1 − m1 g)
F~2 = (0, T1 − m2 g − T2 )
F~3 = (T2 − F, 0)
• Ligadura
y2 + y1 = l1
x3 + h − y2 = l2
• Ecuaciones del movimiento
T1 − m1 g = −m1 ÿ1
T1 − m2 g − T2 = −m2 ÿ2
T2 − F = −m3 ẍ3
•
ÿ1 =
(m1 − m2 )g − F
m1 + m2 + m3
m1
(F + (2m2 + m3 ))
m1 + m2 + m3
1
T2 =
(F (m1 + m2 ) + m3 g(m1 − m2 ))
m1 + m2 + m3
T1 =
98
Capı́tulo 4
• 8.e)
m2
m1
• Vectores posición
~r1 = (0, −y1 )
~r2 = (−x2 , 0)
• Fuerzas
F~1 = (0, T − m1 g)
F~2 = (T, 0)
• Ligadura
x2 + y 1 = l
• Ecuaciones del movimiento
T − m1 g = −m1 ÿ1
T = −m2 ẍ2
•
m1 g
m1 + m2
m1 m2 g
T =
m1 + m2
ÿ1 =
Leyes de Newton
99
• 8.f)
m2
m1
• Vectores posición
~r1 = (0, −y1 )
~r2 = (−x2 , 0)
• Fuerzas
F~1 = (0, 2T − m1 g)
F~2 = (T, 0)
• Ligadura
x2 + 2y1 = l
• Ecuaciones del movimiento
2T − m1 g = −m1 ÿ1
T = −m2 ẍ2
•
m1 g
m1 + 4m2
2m1 m2 g
T =
m1 + 4m2
ÿ1 =
100
Capı́tulo 4
• 8.g)
m2
m1
• Vectores posición
~r1 = (0, −y1 − z1 )
~r2 = (−x2 , 0)
• Fuerzas
F~1 = (0, T̂ − m1 g)
F~2 = (T, 0)
T = 2T̂
• Ligaduras
x2 + y1 = l1
z1 + h − y1 = l2
• Ecuaciones del movimiento
T̂ − m1 g = −m1 (ÿ1 + z̈1 )
T = −m2 ẍ2
•
2m1 g
4m1 + m2
2m1 m2 g
T =
4m1 + m2
ÿ1 =
Leyes de Newton
101
9.) Una cadena flexible de longitud l y masa M se coloca como indica la figura.
Si a t = 0 BC es el doble de AB y la cadena tiene velocidad cero, determinar la
posición y la velocidad de la cadena en cualquier otro instante.
Solución
A
B
C
Sea AB = x, CD = y de forma que
x+y =l
Si la densidad de masa de la cuerda es Ml , entonces:
xM
la masa de AB es
l
yM
y el balance de fuerzas
la masa de BC es
l
yM
yM
g sin α − T =
ÿ
l
l
xM
−T =
ẍ
l
luego
y
g sin α = ÿ
l
La solución de esta ecuación es:
y = Aeωt + Be−ωt
con
r
g sin α
l
Si para t=0 está en reposo en y = 2l/3 estas condiciones iniciales implican que
ω=
2l/3 = A + B
0 = ω(A − B)
y por tanto
A=B=
l
3
l
y = (eωt + e−ωt )
3
102
Capı́tulo 4
10.) Determinar la velocidad de la cuerda de la figura si empieza a resbalar cuando
sus 2/3 se encuentran a la derecha.
Solución
Sea λ =
m
l
la densidad de la cuerda. Entonces:
(λy)ÿ = (λy)g − T
(λx)ẍ = (λx)g − T
x+y =l
de forma que
ÿ = −ẍ =
integrando
2y − l
g
l
1 2 g 2
ẏ = (y − ly) + K
2
l
2gl
Si para y = 2l/3 ẏ = 0, entonces K =
9
r
2g
ẏ =
(y − 2l/3) (y − l/3)
l
Leyes de Newton
103
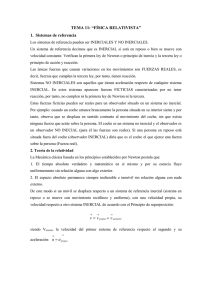
11.) Una serie de alambres rectos se colocan formando abanico con un vértice
común A como indica la figura. En cada alambre se se ensarta una cuenta. En
un mismo instante se dejan caer todas las cuentas desde A. Calcular el lugar
geométrico de las posiciones de las cuentas al cabo de un tiempo t
Solución
Las coordenadas de la cuenta son:
x = r sin α
(1)
y = −r cos α
(2)
Las fuerzas que actúan son el peso de la cuenta y la reacción del alambre que va
en dirección perpendicular al mismo. Por tanto
F~ = (T cos α, −mg + T sin α)
donde la Tensión debe verificar
T = mg sin α
Por tanto
F~ = (mg sin α cos α, −mg(cos α)2
y las ecuaciones del movimiento son
r̈ = g cos α
r = rac12g cos αt2
Se trata de eliminar α y r entre (1) (2) y (3).
Elevando (1) y (2) al cuadrado, sumando y usando (3)
x2 + y 2 =
1
cos2 αg 2 t4
4
Eliminando cos α de (2)
1 y2 2 4
x +y =
g t
4 r2
2
2
104
Capı́tulo 4
1
(x2 + y 2 )2 = y 2 g 2 t4
4
1
x2 + y 2 = ygt2
2
Completando cuadrados
1
1
x2 + (y − gt2 )2 = g 2 t4
4
16
que es una circunferencia de radio 14 gt2 centrada en (0, − 14 gt2 )
Leyes de Newton
105
12.) Una Cadena se coloca sobre una mesa como indica la figura y se suelta.
Calcular el tiempo que tarda en abandonar la mesa
Solución
4/5 L
Lambda = M/L
m1 = λy
m2 = λx
x+y =L
m1 + m2 = M
−m1 g + T = −m1 ÿ
T = −m2 ẍ
m1
g
ÿ =
M
g
ÿ = y
l
ωt
y = 2L/5(e + e−ωt )
con ω 2 = g/L Para que y = L
5/2 = eωT + e−ωT
y por tanto
T = ln 2
p
L/g
106
Capı́tulo 4