Introducción a la Teoría de Juegos
Anuncio

Introducción a la Teoría de Juegos
July 7, 2012
Contents
1
Teoría de la decisión racional individual
2
1.1 Estructura de la Decisión Individual Racional
bajo Certidumbre . . . . . . . . . . . . .
2
1.2 Operativización del modelo de elección racional
individual . . . . . . . . . . . . . . . .
3
2
Teoría de Juegos e interacción Social
5
2.1 ¿Cómo modelamos una situación como ésta como
un juego? . . . . . . . . . . . . . . . .
6
2.2 Conceptos de Equilibrio – Juegos Simultáneos
de Información Completa . . . . . . . . .
7
2.3 Racionalidad Secuencial y el Equilibrio de
Nash Perfecto . . . . . . . . . . . . . .
10
3
Preferencias Sociales
12
3.1 Generosidad en el Juego del Dictador y Preferencias
Altruistas . . . . . . . . . . . . . . . .
13
3.2 Rechazo en el Juego del Ultimátum y Aversión
a la Inequidad . . . . . . . . . . . . . .
14
3.3 Opciones Alternativas en el Juego del Ultimátum
y Preferencias Recíprocas . . . . . . . .
15
1
1
Teoría de la decisión racional individual
1.1
Estructura de la Decisión Individual Racional bajo
Certidumbre
Una decisión individual involucra
• Un conjunto de actos posibles A.
• Un conjunto de estados del mundo S
• Un conjunto de consecuencias C (para cada par de actos y estados del
mundo posible existe una consecuencia).
Se dice que el problema de elección se ha resuelto cuando el agente ha elegido
una acción a⇤ 2 A.
Bajo certidumbre completa, el conjunto S posee un sólo elemento y, por
ende, las acciones determinan en forma únivoca las consecuencias.
En la teoría de la decisión individual racional los agentes son capaces de
ordenar en forma jerárquica las consecuencias y elegir sus acciones sobre la
base de estas preferencias.
• El ordenamiento jerárquico de las posibles consecuencias asociadas a la
acción de un agente se denomina estructura de preferencias (denotada
por %).
– Específicamente, se dice que la consecuencia c0 es (débilmente
preferida) a c1 (denotado por c0 % c1 ) si la acción c0 está antes o
en el mismo lugar en el orden jerárquico en cuestión.
– Se dirá que c0 es (estrictamente preferida) a c1 (denotado por
c0 c1 ) si la acción c0 está antes o en el mismo lugar en el orden
jerárquico en cuestión.
– Finalmente, el agente estará indiferente entre c0 y c1 (denotado
por c0 ˜c1 ) si se cumple simultáneamente c0 % c1 y c0 - c1 .
La estructura de preferencias %, de este modo, es una relación binaria
que permite comparar pares de acciones del conjunto A de acuerdo a
su posición en el orden jerárquico.
2
• Diremos que una estructura de preferencias es racional si cumple con
las siguientes propiedades.
– Completitud : 8 c0 , c1 2 U se cumple que c0 % c1 o c0 - c1 (o
ambos).
– Transitividad: 8 c0 , c1 , c2 2 U se cumple que (c0 % c1 ^ c1 % c2 ) =)
c0 % c2 .
• Ejemplos de violación
– Escenarios ajenos a la experiencia y la incompletitud de las preferencias.
– Capacidad de distinción limitada y violación de la transitividad
(Kanhemann & Tversky, 1984)
• Se dice que la función u : U ! R representa la estructura de preferencias % si 8 c0 , c1 2 U se cumple que (c0 % c1 ) () u(c0 )
u(c1 ).
Está función se denomina función de utilidad ordinal. Este mapa
es particularmente útil cuando las acciones son caracterizables por una
medida continua e idealmente, observable (p.ej., nivel de consumo, años
en la cárcel).
• De este modo el proceso de decisión de un agente se puede modelar
como el proceso de maximización de la utilidad sujeto a las restricciones
ambientales.
1.2
Operativización del modelo de elección racional individual
Este modelo de la acción individual y, por ende, social es demasiado general
como para operar como modelo predictivo (tautológico).
El supuesto auxiliar, de carácter dominante en el uso de la teoría de la
elección racional dentro de las distintas ciencias sociales que han incorporado
el paradigma de la elección racional es el de preferencias estables. Es este
supuesto el que hace falseable la teoría.
Si conocemos la estructura de preferencias de un agente y asumimos
estabilidad de las preferencias predecir su comportamiento es trivial (sólo
3
debemos resolver el problema de optimización que representa la decisión del
agente).
Pero, ¿Cómo podemos acceder a la estructura de preferencias de un
agente?
En la versión más purista de la elección racional, en el denominado enfoque de las preferencias reveladas, las estructura de preferencias de un
agente sólo se "revela" a partir de las propias decisiones previas del agente.
Por ejemplo, si un determinado agente elige c0 sobre c1 y luego c1 sobre c2 ,
se puede desarrollar la siguiente predicción: c2 no será elegida por sobre c0 .
• El enfoque de las preferencias reveladas (desarrollado por Samuelson, 1948) nos permite inferir la estructura de preferencias de un agente
empírico a partir de sus decisiones previas (se asume estabilidad).
• Los axiomas de preferencias reveladas nos permiten testear la teoría de
la elección racional.
• Aplicación en el juego del dictador (Andreoni y Miller, 2002) muestra
agentes altruistas que mayoritariamente no violan el axioma general
de preferencias reveladas (AGP R) !Egoísmo y racionalidad no están
inextricablemente unidos.
Los excesivos requerimientos de información del enfoque de las preferencias
reveladas han obligado a asumir modelos ad hoc de preferencias (definiendo
los argumentos de la función de utilidad) que pueden ser calibrados a partir
de las decisiones de los individuos –en el análisis microeconómico: los niveles
de consumo individual componen los argumentos de la función de utilidad, la
utilidad es creciente en el nivel de consumo de cada bien y la Tasa Marginal
de Sustitución entre los bienes es decreciente.
Ejemplo 1: La Decisión del votante. De acuerdo al modelo espacial
de la decisión del votante (Enelow et al 1970, American Political Science
Review) se asume que el conjunto de consecuencias sobre el que los agentes
poseen una estructura de preferencias corresponde a la agenda de los distintos
candidatos y que esta agenda la podemos caracterizar por un valor en un
espacio continuo y finito. El modelo ad hoc de preferencias en este espacio
consiste en minimizar la distancia entre su agenda y la agenda propuesta
por los distintos candidatos. Consideremos el caso de 2 dimensiones y 3
candidatos.
4
• Dimensiones Agenda
– Valórica: x 2 ( 10, 10) donde el polo negativo corresponde al
extremo conservador y el polo positivo al extremo liberal.
– Económica: y 2 ( 10, 10) donde el polo negativo corresponde al
énfasis en el crecimiento y el polo positivo al énfasis en la distribución).
• Candidatos M, J, S con agendas caracterizadas por los siguientes pares:
(x, y)M = (5, 5); (x, y)J = ( 5, 5); (x, y)S = (0, 0).
• Preferencias representadas por la siguiente función de utilidad
p
u(x, y) = 2 (y y ⇤ )2 + (x x⇤ )2
donde (x⇤ , y ⇤ ) representa la agenda ideal del votante.
• Extensiones del modelo: #Dimensiones > 2, incorporación intereses
individuales, incorporación atributos no excluyentes (p.ej., nivel de corrupción esperado).
2
Teoría de Juegos e interacción Social
Para modelar una situación estratégica, debemos caracterizar tres objetos:
1. Los agentes involucrados (jugadores)
2. El conjunto de estrategias disponibles para cada agente
3. La estructura de preferencias (payoffs) sobre los desenlaces posibles:
combinación de estrategias.
Inicialmente, consideraremos escenarios de Información completa e interacción simultánea
Ejemplo 2. El dilema del prisionero
Dos sospechosos son detenidos en cercanías del lugar de un crimen y la
policía comienza aplicar las técnicas de interrogatorio por separado. Cada
5
uno de ellos tiene la posibilidad de elegir entre confesar acusando a su compañero, o de no hacerlo. Si ninguno de ellos confiesa, entonces ambos pasarán
un año en prisión acusados de cargar un arma sin autorización. Si ambos
confiesan y se acusan mutuamente, los dos irán a prisión por 10 años cada
uno, pero si sólo uno confiesa y acusa a su compañero al implicado le caerán
20 años y el acusador saldrá libre por colaborar con la policía.
2.1
¿Cómo modelamos una situación como ésta como
un juego?
1. Identificar Jugadores: Prisionero 1 y prisionero 2
2. Especificar estrategias de cada jugador: Delatar, No Delatar (el juego
es simétrico, por lo tanto las estrategias son las mismas para cada
jugador).
3. Caracterizar los desenlaces del juego (dado por las combinaciones de estrategias en los juegos de información completa): (D1 , N D2 ), (N D1 , D2 ),
(D1 , D2 ), (N D1 , N D2 ).
4. Especificar preferencias de cada agente (ordenamiento sobre los desenlaces posibles del juego para cada jugador) asumiendo racionalidad
económica:
Jugador 1: (D1 , N D2 )
(N D1 , N D2 )
(D1 , D2 )
(N D1 , D2 )
Jugador 2: (N D1 , D2 )
(N D1 , N D2 )
(D1 , D2 )
(D1 , N D2 )
5. Construir una función de utilidad que asigne pagos consistentes con el
ordenamiento descrito
Jugador 1
Jugador 2
⇡1 (D1 , N D2 ) 4
⇡2 (N D1 , D2 ) 4
⇡1 (N D1 , N D2 ) 3 ⇡2 (N D1 , N D2 ) 3
⇡1 (D1 , D2 )
2
⇡2 (D1 , D2 )
2
⇡1 (N D1 , D2 ) 1
⇡2 (D1 , N D2 ) 1
6. Construir una matriz de doble entrada con los pagos asociados a cada
jugador para cada desenlace del juego –esto es lo que se denomina
6
expresión del juego en su forma normal
DP
D1
N D1
2.2
D2 N D2
(2, 2) (4, 1)
(1, 4) (3, 3)
Conceptos de Equilibrio – Juegos Simultáneos de
Información Completa
Racionalidad y Eliminación de las estrategias dominadas
CE 1: Eliminación Estrategias Dominadas (EED): Se asume racionalidad. Se buscan aquellos desenlaces que sobrevivan a un proceso de eliminación de estrategias dominadas.
Una estrategia x es dominada por una estrategia y para un jugador si
el pago asociado a la estrategia y es mayor al pago asociado a la estrategia
x independientemente del juego de sus opoenentes, i.e., la estrategia y es
siempre una mejor respuesta que la estrategia x.
En el caso del Dilema del Prisionero, No confesar es una estrategia dominada. Por lo tanto, la aplicación de este principio permite predecir (D1 , D2 )
Asumir conocimiento común de la racionalidad abre la posibilidad de
eliminar estrategias en forma sucesiva:
CE 2: Eliminación Iterada Estrategias Dominadas (EIED): Se
asume racionalidad y conocimiento común de la racionalidad. Se buscan
aquellos desenlaces que sobrevivan a un proceso de iteración de estrategias
dominadas.
Abuso No abuso
No Control ( 2, 6)
(2, 2)
Control
( 1, 1)
(0, 0)
En este caso la estrategia honor es una estrategia dominada. Utilizando
CE1: 2 desenlaces posibles. Pero si asumimos conocimiento común de la
racionalidad, el agente 1 va asumir que el agente 2 va a traicionar la confianza
y, bajo ese escenario, la estrategia no confiar es dominada.
7
Asumiendo racionalidad, que la racionalidad de los agentes es conocimiento
común y que los agentes optimizan para el actual juego de sus oponentes,
podemos utilizar como herramienta predictiva el equilibrio de Nash.
CE 3: El Equilibrio de Nash (EN) es un estado social en el que los
agentes no poseen incentivos para desviarse unilateralmente del equilibrio en
cuestión (cambiar estrategia).
En el caso del Dilema del Prisionero, podemos descartar todos los desenlaces del juego utilizando el "test" descrito arriba, excepto el escenario en el
que ambos jugadores se delatan.
Ejemplo 2: QWERTY vs DVORAK. Dos agentes toman simultáneamente (al igual que en el caso del dilema del prisionero), la decisión de utilizar
o un teclado QWERTY o un teclado DVORAK. Si bien el teclado QWERTY
es menos eficiente para quién lo usa, las llamadas "externalidades de red" hacen que los agente prefieran coordinarse en la tecnología menos eficiente que
utilizar la tecnología más eficiente pero estar descoordinados.
Procedemos de igual forma que en el ejemplo del dilema del prisionero
desarrollado en la clase anterior
1. Identificar Jugadores: Jugador 1 y Jugador 2
2. Especificar estrategias de cada jugador: QWERTY, DVORAK (el juego
es simétrico, por lo tanto las estrategias son las mismas para cada
jugador).
3. Caracterizar los desenlaces del juego (dado por las combinaciones de
estrategias): (Q1 , D2 ), (Q1 , Q2 ), (D1 , D2 ), (D1 , Q2 ).
4. Especificar preferencias de cada agente:
Jugador 1: (D1 , D2 )
(Q1 , Q2 )
(D1 , Q2 )
(Q1 , D2 )
Jugador 2: (D1 , D2 )
(Q1 , Q2 )
(Q1 , D2 )
(D1 , Q2 )
5. Construir una función de utilidad que asigne pagos consistentes con el
ordenamiento descrito
8
Jugador 1
⇡1 (D1 , D2 )
⇡1 (Q1 , Q2 )
⇡1 (D1 , Q2 )
⇡1 (Q1 , D2 )
4
3
2
1
Jugador 2
⇡1 (D1 , D2 )
⇡1 (Q1 , Q2 )
⇡1 (Q1 , D2 )
⇡1 (D1 , Q2 )
4
3
2
1
6. Construir una matriz de doble entrada con los pagos asociados a cada
jugador para cada desenlace del juego –esto es lo que se denomina
expresión del juego en su forma normal
Q1
D1
Q2
D2
(3, 3) (1, 2)
(2, 1) (4, 4)
En este escenario de coordinación en teconologías que presentan "externalidades de red", (Q1 , Q2 ) y (D1 , D2 ) son los únicos desenlaces en los que la
desviación unilateral no es provechosa y, por lo tanto, constituyen los equilibrios de Nash de este juego. Es importante notar que en este caso no existen
estrategias dominadas y, por lo tanto, conceptos de equilibrio basados en ese
concepto no permiten desarrollar predicciones en este tipo de estructuras de
interacción.
Una definición alternativa del equilibrio de Nash (equivalente a CE 3)
está dada por:
CE 3’: En un equilibrio de Nash, cada jugador implementa una estrategia
que pertenece a su función de mejor respuesta al juego efectivo de su oponente
(una función de mejor respuesta específica la o las acciones óptimas para cada
posible juego de sus oponentes).
Ejemplo 3. En Marchigue, un pueblo de 2 habitantes, la vida nocturna
ofrece dos posibilidades, mirar las estrellas o caminar al bar "sal si puedes".
Asuma que los 2 habitantes poseen preferencias homogéneas. Mirar las estrellas otorga utilidad 0. Caminar al bar tiene un costo de 1. La estadía en el
bar tiene utilidad 1/2 cuando el bar está repleto y una utilidad de 2 cuando
no lo está.
En su forma normal tenemos
9
Estrellas
Bar
Estrellas
(0, 0)
(0, 2 1 = 1)
1
Bar
(2 1 = 1, 0) ( 2 1 = 12 , 12 1 = 12 )
En el equilibrio cada jugador implementa una mejor respuesta al juego
efectivo de sus oponentes.
La función de mejor respuesta de ambos jugadores está dada por
BR1 : Estrellas1 si Bar2 , Bar1 si Estrellas2
BR2 : Estrellas2 si Bar1 , Bar2 si Estrellas1
A continuación se marcan en negrita para cada cuadrante los pagos de los
jugadores que estén implementando una mejor respuesta en dicho cuadrante.
Estrellas
Bar
Estrellas
(0, 0)
(0, 2 1 = 1)
Bar
(2 1 = 1, 0) ( 12 1 = 12 , 12 1 = 12 )
Los equilibrios de Nash están dados por aquellos desenlaces en los que
ambos jugadores implementan una mejor respuesta, i.e., (Estrellas1 ,Bar2 ),
(Bar1 ,Estrellas2 ).
2.3
Racionalidad Secuencial y el Equilibrio de Nash Perfecto
Ejemplo 4. En una guerra el ejército A decide si atacar o no una determinada posición. En la eventualidad de un ataque, el ejército B debe decidir si
luchar por el territorio o rendirse sin dar batalla. Una eventual batalla sería
desastrosa para ambos ejércitos.
Las estrategias, cuando se incorpora la secuencialidad del juego, deben
configurar un plan contingente completo. Es decir, especificar el juego
de cada jugador para cada eventualidad (juego precedente en los juegos de
información completa).
Para el ejemplo en cuestión, mientras las estrategias del ejército A son
simplemente atacar o no atacar, para el ejército B son: "en caso de un
ataque defenderse" o "en caso de un ataque rendirse". En su forma normal,
este juego se puede expresar como
Luchar NoLuchar
Atacar
( 1, 1)
(2, 0)
N o Atacar
(1, 1)
(1, 1)
Los Equilibrios Nash de este juego son (Atacar, No luchar), (No atacar,
Luchar).
10
¿Es creíble la "amenaza de luchar" asociada al segundo equilibrio?
En el caso de un ataque, ¿que haría un general racional del ejército B?
¿Frente a ese comportamiento que haría un general estratégico al mando del
ejército A?
Los conceptos de equilibrio basados en la anticipación de una acción
racional se dice incorporan la idea de racionalidad secuencial.
Inicialmente, consideraremos juegos de información completa, i.e., no existe incertidumbre exógena.
Para poder utilizar este tipo de conceptos de equilibrio, debemos primero
introducir la forma extensiva de la representación de un juego. Esta forma
incorpora, además de lás preferencias, la secuencialidad de la interacción y
la información que cada agente posee en cada nodo de decisión.
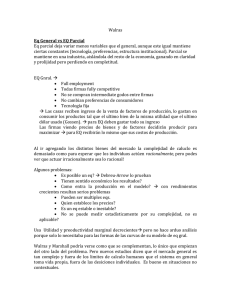
Para el ejemplo previo, el juego representado en su forma extensiva adquiere
la siguiente forma:
Cuando un jugador no posee certeza acerca del nodo en el que se encuentra, i.e., puede estár en más de un nodo de decisión, se dice que estos
nodos pertencen al mismo conjunto de información. Aquéllos juegos en
los que existen conjuntos de información que poseen más de un sólo nodo,
se denominan de información imperfecta. Los juegos simultáneos, como el
dilema del prisionero, son un ejemplo de un juego de información imperfecta.
El ejemplo previo, en cambio es un juego de información perfecta.
Una noción clave para el uso de conceptos de equilibrio basados en el
principio de inducción hacia atrás es la de subjuego que consiste en la
11
continuación de un juego que se inicia en un conjunto de información singular,
i.e., que posee un sólo nodo de decisión.
El concepto de equilibrio estándar basado en la idea de racionalidad secuencial es el equilibrio de Nash Perfecto (ENP).
CE 4: En un equilibrio de Nash Perfecto, se induce un equilibrio de
Nash en cada subjuego.
Para el ejemplo previo, tras la jugada del ejército A, se inicia un subjuego.
El EN de ese juego está dado por (B: No luchar). El ejército A incorpora
el hecho que el ejército B no luchará frente a un eventual ataque. De este
modo, el ENP está dado por (A: Atacar, B: No luchar).
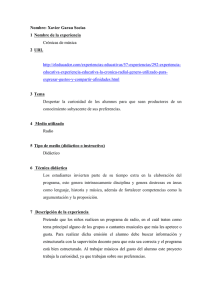
Ejemplo 5. Tres parlamentarios deciden si rechazar o aprobar un aumento de sueldo para ellos mismos. La votación es secuencial. Los beneficios
asociados al aumento están dados por b los costos asociados a votar por la
propuesta están dados por c < b.
En un equilibrio perfecto de Nash:
• El tercer votante rechazará la moción si el primer y segundo votante la
rechazan (no puede cambiar el resultado de la votación), rechazará la
moción si el primer y segundo votante votan a favor (ya no se necesita
su voto), aprobará la moción si el primero vota a favor y el segundo a
favor o si el primero vota en contra y el segundo a favor (se requiere su
voto).
• Incorporando este comportamiento, el segundo votante sólo aprobará
la moción si el primer votante la rechaza (sabiendo que el tercero se
verá obligado a hacerlo).
• El primer votante, entonces, no la aprueba (sabe que el segundo y el
tercero se verán obligados a hacerlo).
3
Preferencias Sociales
En esta sección mostraremos como las disposiciones morales afectan las decisiones de los agentes en situaciones estratégicas. Específicamente se pretende
12
• Presentar la evidencia experimental que muestra las desviaciones con
respecto al modelo de la teoría de la elección racional clásica –donde
se asume que los agentes poseen preferencias egoístas, específicamente,
que maximizan una función creciente y concava de su ingreso monetario
personal.
• Presentar los modelos de preferencias que se han desarrollado en las
ciencias del comportamiento para capturar las distintas expresiones de
estas disposiciones morales en los agentes.
• Mostrar cómo cambian las predicciones en situaciones de interacción
específicas una vez que se asume que los agentes presentan estas disposiciones.
3.1
Generosidad en el Juego del Dictador y Preferencias
Altruistas
• En el Juego del Dictador (JD) el asignador decide como dividir v
pesos; el receptor no puede rechazar esta oferta. El modelo estándar –entendido como el supuesto de racionalidad junto a preferencias
egoístas– predice (xA , xR ) = (⌫, 0).
• Evidencia experimental sin embargo, muestra que en un número significativo de casos los asignadores ofrecen cantidades positivas al recipiente (Forsythe et al, GEB 1994).
• El comportamiento del asignador se puede explicar como la expresión de
preferencias altruistas (incondicionales). En un modelo estilizado,
estas preferencias adquieren las siguiente forma
U i (xi , xj ) = u(xi ) + ↵u(xj ),
↵ 2 (0, 1]
• Asumiendo utilidad marginal decreciente del ingreso, la decisión óptima en el JD está caracterizada por x⇤A < ⌫. Para ↵ = 1 (altruismo
cristiano), x⇤A = ⌫2 .
13
3.2
Rechazo en el Juego del Ultimátum y Aversión a la
Inequidad
• En el Juego del Ultimátum (JU) después que el asignador ha hecho su
oferta –como ocurre en el JD– existe una etapa adicional en la que el
receptor decide si aceptar o rechazar la oferta. En el caso que la rechace,
ambos jugadores obtienen cero. La predicción en este caso, utilizando
el concepto de equilibrio perfecto, determina la misma predicción que
en el caso del JD: (xA , xR ) = (⌫, 0), en estricto rigor, la predicción
es (xA , xR ) = (⌫, ") con " ⇡ 0. El asignador anticipa que un receptor
racional aceptará cualquier oferta por pequeña que sea.
• Evidencia experimental (Guth et al, JEBO 1982) muestra, sin embargo,
que ofertas (xA , xR ) cercanas a (v, 0) son generalmente rechazadas por
los receptores.
• El comportamiento de los receptores en el juego del ultimátunm fueron
inicialmente explicadas como la expresión de preferencias distributivas
–aversión a la inequidad específicamente (Bolton, AER 1991). Una
forma particular de aversión a la inequidad son las preferencias quasimaximin Fehr y Schmidt (AER 2000)
U R (xA , xR ) = xR
↵R max(xA xR , 0)
xA , 0)
R max(xR
Para ↵R y R positivos, el agente R presenta aversión a la inequidad
y su proceso de maximización podría devenir en el rechazo de ofertas
demasiado inequitativas. Por ejemplo, para ↵R > 0.5, R = 0, el
receptor R rechazaría una oferta xR < 4.v en el JU.
• Un modelo alternativo de preferencias sociales consecuencialistas es el
propuesto por Charness & Rabin (2002).
U R (xA , xR ) = (1
)xR + [ min{xA , xR } + (1
donde , 2 [0, 1]
)(xA + xR )]
Para > 0, los individuos le atribuyen consideran, además del bienestar material propio, dos atributos del estado social: i) la posición del
individuo más desfavorecido (a la Rawls) ponderada por un factor ;
14
y ii) la eficiencia social ponderada por un factor (1
). Esta estructura de preferencias, debe notarse, permite comparar entre asignaciones
alternativas, pero no explica el rechazo en el juego del ultimatum.
3.3
Opciones Alternativas en el Juego del Ultimátum y
Preferencias Recíprocas
• Una hipótesis alternativa consiste en considerar las intenciones (su
lectura) como una variable importante en las decisiones de los receptores en el JU.
• En mini JU, donde los asignadores eligen entre dos pares de divisiones
(Falk y Fehr, EI 2001), las tasas de rechazo por la misma oferta difieren
–en contra de las predicción del modelo de aversión a la inequidad. En
particular, observaron las siguientes tasas de rechazo cuando la división
alternativa estaba dada por (xA , xR ) = (8, 2).
División Tasa de Propuesta Tasa de Rechazo
(8, 2)
26.7%
(10, 0)
100%
8.9%
(5, 5)
30%
44.4%
• Falk y Fischbacher argumentan que el comportamiento del receptor, en
este caso, sólo puede ser explicado por la expresión de preferencias
recíprocas como en Rabin (AER 1993).
• Un agente con preferencias recíprocas considera no sólo el estado social en términos abstractos, sino la naturaleza de las acciones hacia el
considerando el contexto en el que se desarrollan. Este agente estará
dispuesto a sacrificar su propio bienestar material para sancionar acciones que el interprete como desfavorables y premiar acciones que el
considere favorables (Gouldner AJS 1960).
• En el contexto del JU, los receptores no sólo están rechazando ofertas
inequitativas, sino sancionando un comportamiento injusto.
• En un modelo estilizado, las preferencias recíprocas adquieren las siguiente forma
U R (xA , xR ) = xR + ✓R (xR xoR )(xA xoA )
| {z }| {z }
A!R
15
R!A
• donde ✓R > 0 es un parámetro que indica el grado de sensibilidad hacia
la efectos de la reciprocidad, xoR and xoA representan los pagos asociados
al comportamiento alternativo de la acción del oponente. En el caso
de arriba, el rechazo de (8, 2) se hace más plausible cuando (5, 5) es
la división alternativa dado que el término no monetario de la utilidad
se hace negativo al aceptar la oferta –en cambio, cuando 10, 0 es la
alternativa este término es positivo.
• Así como el experimento de Falk & Fischbacher, muestra que nuestras
acciones pueden representar castigos a acciones que consideramos injustas, Fowler et al (2005) muestra que los agentes presentan preferencias
por la aversión a la inequidad independientemente de las acciones de los
otros agentes –en su diseño experimental las asignaciones son realizadas
por un computador y esto es conocimiento común.
16