14/7/2009
Anuncio

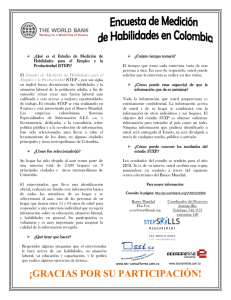
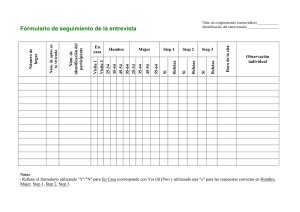
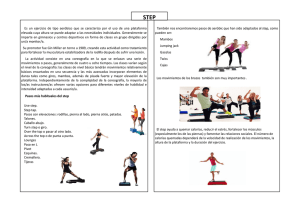
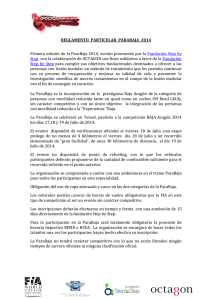
Lección Matlab 14 de julio de 2009 Se dispone de un sistema “Tipo 3” con la siguiente característica: G( s) K ( a s 1)( b s 1) 1 1 ; 2 ; 6 ; H ( s) 1 3 s a b a) Proporcione la información de los puntos de interés del sistema b) Se desea que al probar al sistema con una señal tipo Escalón Unitario se comporte como un sistema de segundo orden con un coeficiente de amortiguación de 0.7. c) Dado que el sistema es “Tipo 3” pruebe el sistema con las señales de prueba escalón, rampa y parábola. Observe el efecto del Pre-Filtro en la dinámica del sistema. Cuál debe ser el Error de Estado Estacionario en los tres casos? Solución: % Lección de Matlab % clear,clc G=zpk([-2 -6],[0 0 0],1/12) G=tf(G) rlocus(G) % Puntos de interés % Ganancia Crítica K=19; [num,den]=tfdata(G,'v'); % Ecuación Característica q=den+K*num; p=roots(q); while max(real(p))<0 K=K-0.1; q=den+K*num; p=roots(q); end Kcrit=K p % Punto de entrada K=340; q=den+K*num; p=roots(q); while abs(imag(max(p)))>0 K=K+0.001; q=den+K*num; p=roots(q); end Kmin=K p % Respuesta dinámica zeta=0.7; wn=0; figure, rlocus(G) sgrid(zeta,wn) [K,r]=rlocfind(G) % Lazo cerrado T=zpk(feedback(K*G,[1])) figure, step(T) % Pre-Filtro % a. Eliminar acción de los dos ceros F1=zpk([],[-2 -6],12) Tpf1=minreal(series(F1,T)) figure, step(Tpf1) % b. Eliminar acción del polo dominante F2=zpk([-1.9],[-2 -6],12/1.9) Tpf2=minreal(series(F2,T)) figure, step(Tpf2) Kcrit = 18.0000 p = 0.0000 + 3.4641i; 0.0000 - 3.4641i; -1.5000 Kmin = 342.2440 p = -13.3147; -13.2684; -1.9373 K = 191.9430 r = -7.0496 + 7.1786i; -7.0496 - 7.1786i; -1.8961 Zero/pole/gain: 15.9952 (s+6) (s+2) ------------------------------(s+1.896) (s^2 + 14.1s + 101.2) Zero/pole/gain: 101.0226 (s+1.9) ------------------------------(s+1.896) (s^2 + 14.1s + 101.2) El sistema es de tercer orden en donde se aprecia que la raíz real se encuentra mas cerca del eje imaginario. La respuesta al escalón presenta un Sobrenivel Porcentual de 24% y un Tiempo de Estabilización de 0.74 seg. Como primer acción se elimina la acción de los dos ceros de la planta utilizando un Pre-Filtro con dos polos. En este caso, el sistema presenta una respuesta en la que domina la acción de la raíz real; es decir, la de un sistema sobreamortiguado. El Tiempo de Estabilización para esta situación ha aumentado al valor de 2.2 seg. Para permitir la dominancia de segundo orden, se minimiza la acción de la raíz real que aproximadamente está localizada en -1.9, mediante la modificación en el Pre-Filtro al aumentar un cero en esa posición. La respuesta ahora presenta un Sobrenivel Porcentual de 4.44% y un Tiempo de Estabilización de 0.59 seg. Bajo estas condiciones, el comportamiento del sistema cumple adecuadamente con un buen tiempo de respuesta y de sobrenivel. c.) % Prueba con señal Escalón t=[0:0.01:2]; u=tf(1); [y1,t]=step(u,t); [y2,t]=step(Tpf2,t); % Prueba con señal Rampa R=tf(1,[1 0]); [y3,t]=step(R,t); Tpf4=series(R,Tpf2); [y4,t]= step(Tpf4,t); % Prueba con señal Parabólica P=tf(1,[1 0 0]); [y5,t]=step(P,t); Tpf5=series(P,Tpf2); [y6,t]= step(Tpf5,t); figure, plot(t,y1,t,y2,t,y3,t,y4,t,y5,t,y6) % Prueba con las tres señales sin el Pre-Filro [y7,t]=step(T,t); T1=series(R,T); [y8,t]= step(T1,t); T2=series(P,T); [y9,t]= step(T2,t); figure, plot(t,y1,t,y7,t,y3,t,y8,t,y5,t,y9) En la primer gráfica se ha probado al sistema incluyendo el Pre-Filtro y se observa que el comportamiento del sistema se comporta como si se tratara de un sistema “Tipo 1”; esto es, el Error de Estado Estacionario es cero solo para la señal de prueba tipo Escalón Unitario. En la segunda gráfica se repite la prueba pero eliminando el Pre-Filtro. Ahora se observa que la dinámica del sistema sí responde de acuerdo a su naturaleza de ser “Tipo 3”; es decir, en los tres casos el Error de Estado Estacionario es cero.