Análisis en Frecuencia de Señales y Sistemas
Anuncio

Asignatura:
Arquitecturas para el Tratamiento de
Señal e Imagen
Introducción: Análisis en Frecuencia
de Señales y Sistemas
Depto. de Tecnología Fotónica
Facultad de Informática de la UPM
Mayo, 2001
Rev.: Mayo, 2005
Julio Gutiérrez Ríos
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
1.
SEÑALES EN TIEMPO CONTINUO ............................................................................................2
SEÑALES CONTINUAS PERIÓDICAS. ..........................................................................................................2
1.1.1. Espectro: Series de Fourier. .....................................................................................................2
1.1.2. Potencia Media: Teorema de Parseval. ....................................................................................3
1.2. SEÑALES APERIÓDICAS EN TIEMPO CONTÍNUO..................................................................................3
1.2.1. Transformada de Fourier..........................................................................................................3
1.2.2. Densidad Espectral de Energía de Señales Aperiódicas en Tiempo Continuo: Teorema de
Rayleigh. .............................................................................................................................................4
1.2.3. Caso del pulso rectangular. ......................................................................................................5
1.2.4. Convolución. .............................................................................................................................5
1.2.5. Propiedades de simetría de la TF. ............................................................................................6
1.2.6. Relaciones en el tiempo y la frecuencia de señales aperiódicas en tiempo continuo................7
1.2.7. Funciones elementales. .............................................................................................................7
1.3 TEOREMA DE MUESTREO ....................................................................................................................8
1.4. SISTEMAS ANALÓGICOS.....................................................................................................................9
1.4.1. Sistemas Lineales e Invariantes en el Tiempo (LTI)................................................................10
1.4.2. Transformada de Laplace .......................................................................................................10
2.
SEÑALES EN TIEMPO DISCRETO ...........................................................................................14
2.1. SEÑALES PERIÓDICAS EN TIEMPO DISCRETO .....................................................................................15
2.1.1. Espectro: Series de Fourier de señales en tiempo discreto (DTFS)........................................15
2.1.2. Densidad espectral de potencia: Teorema de Parseval para señales discretas......................16
2.2. SEÑALES APERIÓDICAS EN TIEMPO DISCRETO .................................................................................17
2.2.1. Espectro: Transformada de Fourier en Tiempo Discreto (DTFT)..........................................17
2.2.2. Densidad espectral de Energía ...............................................................................................18
2.2.3. Ejemplo: pulso rectangular en tiempo discreto ......................................................................18
2.2.4. Convolución y Correlación .....................................................................................................19
2.2.5. Propiedades de Simetría de la DTFT......................................................................................19
2.2.6. Propiedades y Teoremas de la DTFT......................................................................................20
2.2.7. Funciones elementales. ...........................................................................................................20
2.2.8. Transformada Discreta de Fourier (DFT) ..............................................................................21
2.2.9. Ejemplo de DFT: Pulso Rectangular. .....................................................................................22
2.2.10. Convolución Circular............................................................................................................22
2.2.11. Propiedades de simetría de la DFT. .....................................................................................23
2.2.12. Propiedades y Teoremas de la DFT......................................................................................23
2.2.13. Transformada Rápida de Fourier (FFT)...............................................................................24
2.3. SISTEMAS DISCRETOS. .....................................................................................................................27
2.3.1. Sistemas Lineales e Invariantes en el Tiempo (LTI)................................................................27
2.3.2. Transformada z. ......................................................................................................................28
2.3.3. Propiedades de la Tz. ..............................................................................................................30
1
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Señales en tiempo Continuo
1.
1.1. Señales Continuas Periódicas.
1.1.1. Espectro: Series de Fourier.
x p (t ) = x p (t + T0 ) ;
x p (t ) =
∫T
F0 =
1
;
T0
Ω 0 = 2π ⋅ F0
∞
∑ C k ⋅ exp( jkΩ 0 t )
k = −∞
x p (t ) ⋅ exp(− jkΩ 0 t ) dt =
0
∞
∑
m = −∞
C m ⋅ ∫ exp( j (m − k )Ω 0 t ) dt =C k ∫ dt =C k T0
T0
∫T exp( j (m − k )Ω 0 t ) dt = 0
ya que
T0
∀m≠k
0
∴ Ck =
1
T0
∫T
x p (t ) ⋅ exp(− jkΩ 0 t ) dt
0
En consecuencia:
Si una señal es continua y periódica Ù Espectro Discreto
Los Armónicos son múltiplos enteros de la frecuencia fundamental F0.
A mayor período T0 Ù Menor intervalo de frecuencia entre los armónicos
Si x p(t) es real ⇒ x p (t ) =
⇒ Ck = C−* k
;
∞
∑ Ck ⋅ exp( jkΩ0t )
ck
es real ⇒
k = −∞
C− k = Ck*
En virtud de esto, se puede escribir:
x p (t ) =
c-k
∞
∞
k = −∞
k =1
∑ Ck ⋅ exp( jkΩ0t ) = C0 + 2 ⋅ ∑ Ck cos(kΩ0t + Φ k )
x p (t ) = C0 +
siendo Φ k = ∠Ck
∞
∑ 2 Ck (cos kΩ0t ⋅ cos Φ k − senkΩ0t ⋅ senΦ k ) =
k =1
=
∞
∑ ( Ak cos kΩ0t + Bk senkΩ0t )
k =0
⎧⎪ A0 = C0 = x p (t )
⎫⎪
donde ⎨
⎬
⎪⎩ Ak = 2 Re[Ck ]; Bk = −2 Im[Ck ]⎪⎭
2
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
1.1.2. Potencia Media: Teorema de Parseval.
1
P =
T0
x p (t )
∫T
2
0
1
dt =
T0
∑ Ck* ⋅ Ck = ∑ Ck
=
k
∫T
x p (t )
∞
∑ Ck* ⋅ exp(− jkΩ 0t )dt = ∑ Ck* ⋅ T0 ∫T
1
k = −∞
0
x p (t ) ⋅ exp(− jkΩ 0 t )dt =
0
k
2
k
Si x(t ) es real :
P = C02 + 2 ⋅
∞
∑
Ck
∑(
∞
1
= A02 + ⋅
Ak2 + Bk2
2 k =1
2
k =1
)
1.2. Señales Aperiódicas en Tiempo Contínuo.
1.2.1. Transformada de Fourier.
Cuando se trata de una señal no periódica, se puede obtener el espectro como si ésta fuera
una señal periódica pero con un periodo infinito. De esta forma se obtiene:
x(t ) = lim x p (t )
x(t)
T0 → ∞
∞
x p (t ) =
∑ Ck ⋅ exp( jk 2πF0t )
k = −∞
Ck =
1
T0
x p (t ) ⋅ exp(− jk 2πF0t ) dt
∫T
0
-T0
T0
T
≤t ≤ 0
2
2
T
t > 0
2
T0
x(t ) = x p (t ) −
dado que
Ck →
1
T0
t
xp(t)
x(t ) = 0
∞
∫− ∞ x(t )⋅ exp(− jk 2πF0t )dt
t
T0
⇒
⇒ Como T0 → ∞ y F0 → 0, kF0 → F y el espectro se hace continuo.
En base a esto, se define la transformada de Fourier como :
X ( j 2πF ) =
∞
∫− ∞
x(t ) ⋅ exp(− j 2πFt )dt
o bien
X ( jΩ ) =
∞
∫− ∞ x(t )⋅ exp(− jΩt )dt
La Transformada de Fourier (TF) no promedia en el período T0, ya que éste se prolonga
hasta el infinito. En consecuencia, como se verá más adelante, su módulo al cuadrado no
representa la potencia como en las series de Fourier, sino la densidad espectral de energía.
En efecto, al considerar el período infinito, si la potencia fuera finita, la energía tendría que
ser infinita.
3
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Al mismo tiempo, se puede ver que los coeficientes de Fourier de xp(t) son muestras de
X(j2πF) tomadas en múltiplos de F0 y escaladas por F0, esto es, 1/T0 :
1
x p (t ) =
T0
∞
∑ X (kF0 ) exp(2πkF0 )
k = −∞
∞
∑ X (k∆F ) exp(2πk∆F )∆F
x p (t ) =
k = −∞
∴ Si T0 → ∞ ⇒ ∆F → 0
x(t ) = lim x p (t ) =
T0 → ∞
x(t ) =
∞
∫− ∞ X ( j 2πF ) exp( j 2πF )dF
∞
∫− ∞ X ( j 2πF ) exp( j 2πF )dF
X ( j 2πF ) =
;
∞
∫− ∞ x(t ) ⋅ exp(− j 2πFt )dt
O bien :
x(t ) =
∞
1
2π − ∞
∫
X ( jΩ ) exp( jΩ )dΩ ;
X ( jΩ ) =
∞
∫− ∞ x(t ) dt < ∞
Para que exista la TF, es necesario que
Si la TF existe ⇒
∞
∫− ∞
∞
∫− ∞ x(t ) ⋅ exp(− jΩt )dt
2
x(t ) dt < ∞ ⇒ Energía finita
Se pueden enumerar tres propiedades fundamentales de la Transformada de Fourier:
1. La TF es una función compleja, de forma que ⏐X(j2πF)⏐ es el módulo del
espectro de x(t) y arg(X(j2πF)) es la fase del espectro de x(t).
2. La TF de x(t) para f = 0 es el área de x(t) ya que
X (0) =
∞
∫− ∞ x(t )dt
3. Si x(t) es real, X(-j2πF)= X*(j2πF), con lo que la amplitud ⏐ X(j2πF)⏐ es una
función par, mientras que la fase arg(X(j2πF)) es una función impar. Se dice
entonces que la señal es hermitiana, o tiene simetría hermitiana.
1.2.2. Densidad Espectral de Energía de Señales Aperiódicas en Tiempo Continuo: Teorema de
Rayleigh.
La energía de una señal es :
Ex =
∞
∞
∫− ∞ x(t )
∫− ∞ X
*
2
dt =
( j 2πF ) ⋅ ⎡⎢∫
∞
∞
⎡
∞
∫− ∞ x(t )⋅ x (t )dt = ∫− ∞ x(t )⋅ ⎢⎣∫− ∞ X
∞
*
⎤
x(t )exp(− j 2πft )dt ⎥ dF =
⎣ −∞
⎦
Con lo que X ( j 2πF )
2
∞
∫− ∞ X
*
*
( j 2πF )exp(− j 2πft )dF ⎤⎥ dt =
( j 2πF ) ⋅ X ( j 2πF )df
⎦
=
∞
∫− ∞ X ( j 2πF )
2
df
es la densidad espectral de energía.
4
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Caso del pulso rectangular.
En la figura se ha representado un pulso rectangular
en el tiempo. Su transformada de Fourier será la
siguiente:
X ( j 2πF ) =
=
τ
A
∞
∫− ∞ x(t )exp(− j 2πFt )dt =
−τ/2
∫−τ 2 A exp(− j 2πFt )dt =
τ/2
Aτ
t
2
τ
A
exp(− j 2πFt ) τ2 =
−3/τ −2/τ -1/τ
−
j 2πF
2
exp( jπFτ ) − exp(− jπFτ )
=A
=
j 2πf
sen(πFτ )
senπx
= Aτ
= Aτ ⋅ sinc(Fτ )
siendo por definición sinc(x ) =
πFτ
πx
En este caso la TF es una función real y, por tanto, par.
=−
F
1/τ
2/τ
3/τ
1.2.3. Convolución.
Se define la convolución de dos señales, x1 (t ) y x2 (t ), de la siguiente forma :
convolución ( x1 (t ), x2 (t )) = x1 (t ) ∗ x2 (t ) =
∞
∫− ∞ x1 (τ )⋅ x2 (t-τ )dτ
Se pueden comprobar las siguientes propiedades de la convolución :
Conmutativa :
x1 ∗ x2 = x2 ∗ x1
x1 ∗ ( x2 ∗ x3 ) = ( x1 ∗ x2 ) ∗ x3
Asociativa :
Distributiva con la suma : x1 ∗ ( x2 + x3 ) = ( x1 ∗ x2 ) + ( x1 ∗ x3 )
El teorema de la convolución establece que la TF de la convolución de dos funciones es
igual al producto de sus trannformadas de Fourier, tal como se demuestra a continuación :
TF( x1 (t ) ∗ x2 (t )) =
=
∞
⎡
∞
⎡
−∞ ⎢
⎣
∞
⎤
∫ ∫− ∞ x1 (τ )⋅ x2 (t -τ )dτ ⎥⎦ exp(− j 2πFt )dt =
∞
⎤
∞
∫− ∞ x1 (τ )⋅ ⎢⎣∫− ∞ x2 (t -τ )exp(− j 2πFt )dt ⎥⎦ dτ = ∫− ∞ x1 (τ )⋅ X 2 ( j 2πF )exp(− j 2πFτ )dτ =
= X 1 ( j 2πF ) ⋅ X 2 ( j 2πF )
Tal es así que con frecuencia es más fácil obtener la convolución de dos funciones haciendo
la transformada inversa del producto de las transformadas.
De la misma forma, la transformada inversa de la convolución es igual al producto de las
funciones :
TF −1 ( X 1 ( j 2πF ) ∗ X 2 ( j 2πF )) = x1 (t )·x2 (t )
5
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
1.2.4. Propiedades de simetría de la TF.
En general, se puede escribir la TF de una señal como :
X ( j 2πF ) = X R ( j 2πF ) + jX I ( j 2πF ) ( X R = Re[ X ] ; X I = Im[ X ])
X ( j 2πF ) = X e ( j 2πF ) + jX o ( j 2πF )
X e ( j 2πF ) =
donde
( X e : Función par ;
X o : Función impar )
∞
∫− ∞ x(t )cos 2πft ⋅ dt = 12 [X ( j 2πF ) + X (− j 2πF )]
X o ( j 2πF ) = −
∞
∫− ∞ x(t )sen2πft ⋅ dt = − 12 j[X ( j 2πF ) − X (− j 2πF )]
ya que exp(− j 2πFt ) = cos 2πFt − j sen 2πFt
En base a esto, si la señal x(t ) es real, se tiene :
X e ( j 2πF ) = X R ( j 2πF ) ; X o ( j 2πF ) = X I ( j 2πF )
De donde se deduce la simetría hermitiana de la TF de las señales reales, ya enunciada :
X (− j 2πF ) = X * ( j 2πF )
Si, además, x(t ) tuviera simetría par o impar, la integral de Fourier se simplifica así :
x(t ) par ⇒
X ( j 2πF ) = X e ( j 2πF ) = 2
x(t ) impar ⇒
ya que
∞
∫ −∞
∞
∫0
x(t )cos 2πFt ⋅ dt
X ( j 2πF ) = X o ( j 2πF ) = −2 j
v(t ) ⋅ dt =
2
∞
∫ 0 v(t )⋅ dt
∞
∫0
x(t )sen2πFt ⋅ dt
si v(t ) es par
0 si ν (t ) es impar
En todo esto, hay que tener en cuenta que la simetría de una señal en el tiempo depende de
dónde se haya tomado el origen temporal, de forma que éste se podría elegir para que
cumpla condiciones de simetría ya que el origen de tiempo no tiene un sentido físico único,
cosa que no ocurre con la frecuencia que sí tiene bien definido el origen.
6
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
1.2.5. Relaciones en el tiempo y la frecuencia de señales aperiódicas en tiempo continuo.
A continuación se da una serie de relaciones fundamentales que cumplen las señales
consideradas en el dominio del tiempo y el de la frecuencia. Estas propiedades son
fácilmente demostrables a partir de las definiciones dadas, de forma que nos limitamos a
enunciarlas.
x(t ) ↔ X ( j 2πF )
Dualidad :
Superposición :
X (t ) ↔ x(− j 2πF )
a1 ⋅ x1 (t ) + a2 ⋅ x2 (t ) ↔ a1 ⋅ X 1 ( j 2πF ) + a2 ⋅ X 2 ( j 2πF )
Funciones Conjugadas :
Desplazamiento en el tiempo :
x* (t ) ↔ X * (− j 2πF )
x(t − t d ) ↔ exp(− j 2πFt d )X ( j 2πF )
Traslación en frecuencia :
exp( j 2πFa t ) ⋅ x(t ) ↔ X (F − Fa )
x(t ) cos(2πFa t + φ ) ↔
Modulación :
x(αt ) ↔
Cambio de Escala :
dn
Derivación :
dt
n
1
2
[exp(− jφ )X (F + Fa ) + exp(+ jφ ) ⋅ X (F − Fa )]
⎛F⎞
X⎜ ⎟
α ⎝α ⎠
1
x(t ) ↔ ( j 2πf )n X ( j 2πF )
dn
X ( j 2πF )
dF n
x1 (t ) ∗ x2 (t ) ↔ X 1 ( j 2πF ) ⋅ X 2 ( j 2πF )
(− j 2πt )n x(t ) ↔
Convolución :
x1 (t ) ⋅ x2 (t ) ↔ X 1 ( j 2πF ) ∗ X 2 ( j 2πF )
1.2.6. Funciones elementales.
A continuación se definen algunas funciones elementales
de utilidad.
Escalón : u (t ) =
1 t>0
0 t<0
Signo : sgn (t ) =
1
−1
[
t>0
sgn (t ) = 2 u (t ) − 12
t<0
]
u(t)
sgn(t)
⎛ t ⎞ 1 t <τ
⎛t⎞
⎛ τ⎞ ⎛ τ⎞
Pulso : Π⎜ ⎟ =
Π⎜ ⎟ = u⎜ t + ⎟ − u⎜ t − ⎟
⎝τ ⎠ 0 t > τ
⎝τ ⎠
⎝ 2⎠ ⎝ 2⎠
Delta de Dirac :
δ (t ) :
δ (t ) = 0 ∀t ≠ 0
Π(t/τ)
∞
∫− ∞ δ(t ) ⋅ dt = 1
La representación utilizada para la Delta de Dirac, o
impulso unidad, es meramente simbólica ya que se trata
de un ente de área unidad pero infinitamente estrecho e
infinitamente intenso.
δ(t)
7
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
La función delta de Dirac tiene las siguientes propiedades:
ε
∫−ε δ (t ) ⋅ dt = 1
ε arbitrariamente pequeño
x(0) t1 < 0 < t2
⎧
t2
∫t1 x(t )δ (t ) ⋅ dt = ⎨0
⎩
de lo contrario
∞
∫−∞ x(t )δ (t − td ) ⋅ dt = x(td )
x(t ) ∗ δ (t − td ) = x(t − td )
1 ⎛t⎞
δ (t ) = lim Π ⎜ ⎟
ε →0 ε ⎝ ε ⎠
⎛t⎞
δ (t ) = lim sinc⎜ ⎟
ε →0 ε
⎝ε ⎠
1
1.3. Teorema de Muestreo
Se trata de ver cuál es la representación en el dominio de la frecuencia de una señal que sea
el resultado de extraer un conjunto de muestras de la señal.
Una muestra es el valor que la señal toma en un instante determinado. Cuando se habla de
muestreo de una señal, se entiende que se toma un conjunto de muestras de la misma y,
mientras no se especifique lo contrario, se asumirá que el muestreo se lleva a cabo a
intervalos regulares de tiempo.
El objeto del muestreo es adquirir información de la señal, normalmente en forma digital,
para luego poder procesarla. Como se verá a continuación, el teorema de muestreo
establece que si se cumplen ciertas condiciones en la toma de muestras, se puede llegar a
adquirir con el muestro toda la información de la señal.
El procedimiento para obtener muestras de forma ideal es multiplicar la señal por un tren
de deltas de Dirac. Sin embargo, el muestreo en términos reales se puede ver como el
producto de la señal por un tren de pulsos (señal de muestreo) uniforme, tal que cuanto
más estrechos sean estos pulsos más se acerca el muestreo al caso ideal.
Así pues, si s(t) es el tren de pulsos, la expresión de la señal x(t) muestreada, xs(t), será:
xs (t ) = x(t ) ⋅ s(t )
s (t ) es una señal periódica de periodo Ts (periodo de muestreo) y frecuencia Fs = 1 ,
Ts
luego podrá expresarse mediante una serie de Fourier :
s (t ) =
+∞
∑ Ck exp( jk 2πFst )
k = −∞
+∞
+∞
k = −∞
k = −∞
∴ xs (t ) = x(t ) ⋅
∑ Ck exp( jk 2πFst ) = ∑ Ck x(t )exp( jk 2πFs t )
El producto de la señal por una exponencial se traduce en una traslación en frecuencia :
X s ( j 2πF ) =
+∞
∑ Ck ⋅X (F − kFs )
k = −∞
8
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
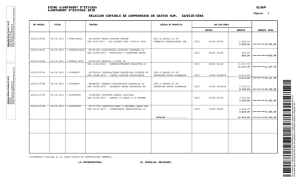
Esto significa que el espectro de la señal muestreada es la repetición periódica del espectro
de la señal original en el dominio de
la frecuencia. Nótese en la figura que
X(f)
las réplicas del espectro están
ponderadas con arreglo a unos
supuestos coeficientes de Fourier.
-BW 0 BW
f
En consecuencia, si la señal original
Xs(f)
tiene una anchura de banda limitada
BW, cuando la frecuencia de muestreo
es superior al doble de dicha anchura
0
de banda, el espectro se repite sin
· · · -3fs -2fs
-fs
fs
2fs 3fs · · ·
f
Xs(f)
solapamiento y, en consecuencia, la
señal original es recuperable a partir
de la señal muestreada mediante un
filtro paso bajo que separe la réplica
-2fs
-fs
0
fs
2fs f
del espectro original que no ha sufrido
traslación en frecuencia. Este es el
caso de la figura inferior donde la función de transferencia del filtro ideal que lo lograría ha
sido señalado mediante línea de puntos. Por lo contrario, en la figura del centro, la
frecuencia de muestreo no es suficiente, con lo que las réplicas se solapan y no es posible
recuperar la señal.
Este es el denominado Criterio de Nyquist que determina que la frecuencia mínima de
muestreo para poder recuperar la señal es
f sMIN = 2 BW
Supóngase ahora que el muestreo es ideal. En este caso s (t ) es un tren de impulsos unidad :
s (t ) =
+∞
∑δ (t − nTs )
y sus coeficientes de Fourier :
n = −∞
1
Ck =
Ts
⎡ +∞
⎤
1
δ (t − nTs )⎥ exp(− jkΩ s t ) ⋅ dt =
⎢
Ts ⎢
Ts
⎣n = −∞
⎦⎥
∫ ∑
∴ X s ( j 2πF ) =
1
Ts
+∞
∑ X (F − kFs )
k = −∞
de forma que en este caso el espectro se repite siempre con la misma ponderación.
1.4. Sistemas Analógicos.
Un sistema es una transformación u operación que se lleva a cabo sobre una señal de
entrada para producir una señal de salida. Dicha transformación se realiza con arreglo a
una ley que representaremos por T[ · ].
Esto es, si x(t ) es la señal de entrada, la señal de salida y (t ) vendrá dada por :
y (t ) = T [x(t )]
x(t)
T[ ]
y(t)
Un sistema se dice que es real si siendo x(t ) real ⇒ y (t ) también es real
Un sistema se dice que es lineal si : T [a1 ⋅ x1 (t ) + a2 ⋅ x2 (t )] = a1 ⋅ T [x1 (t )] + a2 ⋅ T [x2 (t )]
Un sistema se dice que es invariante en el tiempo si : T [x(t − t d )] = y (t − t d )
Un sistema se dice que es causal si siendo x(t ) = 0 para t < 0 ⇒ y (t ) = 0 para t < 0
9
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
1.4.1. Sistemas Lineales e Invariantes en el Tiempo (LTI)
Una clase importante dentro de los sistemas es la de los sistemas Lineales e Invariantes en
el Tiempo (LTI). Dichos sistemas, que para distinguirlos los representaremos por L[·], por
el hecho de ser lineales cumplen el principio de superposición. Su condición como
sistemas LTI hace que puedan ser caracterizados completamente por su respuesta al
impulso unidad (delta de Dirac).
En efecto, sea h(t ) la respuesta al impulso unidad :
h(t ) = L[δ (t )]
La respuesta a una señal x(t ) cualquiera será :
δ(t)
x (t )
h(t)
h(t)*x(t)
L[ ]
∞
y (t ) = L[x(t )] = L[x(t ) ∗ δ (t )] = L ⎡ ∫ x(τ ) ⋅ δ (t − τ ) ⋅ dt ⎤ =
⎢⎣ −∞
⎥⎦
= {siendo lineal} = ∫ x(τ )·L[δ (t − τ )]⋅ dt = {siendo invariante en el tiempo} =
∞
−∞
∞
= ∫ x(τ )·h(t − τ ) ⋅ dt = x(t ) ∗ h(t )
−∞
Lo que demuestra que la respuesta de un sistema LTI a una señal cualquiera se puede
obtener siempre que se conozca su respuesta al impulso unidad y, por tanto, ésta
caracteriza completamente el comportamiento del sistema.
Esto mismo se puede ver en el dominio de la frecuencia:
y (t ) = x(t ) ∗ h(t )
Tomando la TF de esta expresión :
Y ( j 2πF ) = X ( j 2πF ) ⋅ H ( j 2πF )
donde
H ( j 2πF ) = TF[h(t )]
es la denominada Función de Transferencia
de forma que la respuesta en el dominio de la frecuencia se
obtiene mediante el producto de la función de transferencia con
el espectro de la señal de entrada.
Una consecuencia de ello es que la función de transferencia
equivalente de dos sistemas en cascada es el producto de las
funciones de transferencia de cada uno de ellos. De la misma
forma, la respuesta al impulso unidad del conjunto de los dos
sistemas en cascada será la convolución de las respuestas
impulsionales de cada uno de ellos.
h1(t)
h2(t)
H1( j 2πF )
H2( j 2πF )
h1(t)* h2(t)
H1( j 2πF )· H2( j 2πF )
1.4.2. Transformada de Laplace
La transformada de Laplace (TL) L [·] se define de la siguiente forma:
L[x(t )] = X (s ) = ∫
∞
−∞
x(t ) exp(− st )dt
siendo s una variable compleja s = σ + jΩ
Se hace patente su similitud con la TF, ya que realmente se trata de una generalización de
ésta a todo el plano complejo, en lugar de concretarse estrictamente en el dominio de la
frecuencia. De hecho, la transformada de Fourier no siempre converge, con lo que resulta
interesante una generalización que cubra un conjunto más amplio de señales. Así, si se
sustituye s por jω la expresión de la Transformada de Laplace se convierte en la TF. Ahora
bien, esto no quiere decir que exista la TF pues, de hecho, la transformada de Laplace sólo
converge en una región del plano complejo llamada Región de Convergencia (RdC). En
10
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
consecuencia, si el eje jω está dentro de la RdC, la TF converge y es la TL con s = jω. Por
otra parte, el hecho de que la TL se extienda por todo el plano complejo permite el estudio
fácil de los transitorios, mientras que la TF está orientada más bien al régimen permanente.
La RdC son franjas verticales en el plano complejo. Por ejemplo,
Sea la función :
L [x(t )] = ∫
∞
−∞
x(t ) = exp(− a ⋅ t
)
exp(− a ⋅ t ) ⋅ exp(− st ) ⋅ dt = ∫
1
=
exp((a − s )t )
a−s
0
0
−∞
∞
exp((a − s )t ) ⋅ dt + ∫ exp(− (a + s )t ) ⋅ dt =
1
−
exp(− (a + s )t )
a+s
−∞
0
∞
0
El primer sumando sólo converge para σ < a, mientras que el segundo converge para σ > −a
2s
jΩ
∴ L [x(t )] = X (s ) = 2 2
RdC : − a < σ < a
a −s
En la figura superior se encuentra representada la RdC para
RdC
esta función. Sin embargo, para una función x(t) igual a 0 para
t < 0 , su TL converge en todo el semiplano a la derecha del
-a
a
σ
límite de convergencia. Por ejemplo, para la función anterior
pero anulándola para t < 0 :
x(t ) = exp(− a t ) ⋅ u (t ) = exp(− at ) ⋅ u (t )
X (s ) = L [exp(− at ) ⋅ u (t )] =
∞
0
exp(− at ) exp(− st ) ⋅ dt =
jΩ
∞
1
exp(− (a + s ) t ) ⋅ dt = −
exp(− (a + s ) t ) =
a+s
0
=
∫
=
1
a+s
0
∫
∞
RdC : σ > − a
RdC
-a
σ
región de convergencia que se encuentra representada en la
figura inferior. Si por lo contrario, la función fuera 0 para t > 0, la RdC se extendería a la
izquierda del límite (en nuestro ejemplo sería el semiplano σ < a). Finalmente, si la
función fuera 0 para todo t excepto un intervalo, la RdC sería todo el plano. En efecto, en
todos los casos mencionados sucede que ⏐x(t)exp(-st)⏐→ 0 cuando t → ∞ .
Puesto que es muy frecuente que las señales tengan un origen temporal antes del cual valen
0, se utiliza con mucha frecuencia la Transformada de Laplace Unilateral (L -):
∞
L − [x(t )] = ∫ x(t ) exp(− st ) ⋅ dt
0
que asume que x(t ) = 0 ∀t < 0 o bien se ignora.
El hecho de que se integre a partir de 0 y no a partir de un origen de tiempo cualquiera no
supone pérdida de generalidad, puesto que siempre se puede elegir la referencia temporal
con el 0 en el origen. Resulta evidente que si la función x(t) = x(t)· u(t), es decir, x(t) = 0
para t > 0, la TL unilateral es la misma que la bilateral.
11
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Se pueden comprobar las siguientes propiedades de la TL:
x(t ) ↔ X (s )
Superposición :
a1 ⋅ x1 (t ) + a2 ⋅ x2 (t ) ↔ a1 ⋅ X 1 (s ) + a2 ⋅ X 2 (s )
Desplazamiento en el tiempo :
x(t − t d ) ↔ exp(− st d )X (s )
Traslación en frecuencia :
exp(− at )x(t ) ↔ X (s + a )
Cambio de Escala :
x(αt ) ↔
⎛s⎞
X⎜ ⎟
α ⎝α ⎠
1
( )
d
x(t ) ↔ − x 0 − + sX (s )
dt
t
1
∫0 x(t )⋅ dt ↔ s X (s )
x1 (t ) ∗ x2 (t ) ↔ X 1 (s ) ⋅ X 2 (s )
Derivación :
Integración :
Convolución :
Teorema del valor Inicial :
lim x(t ) = lim sX (s )
Teorema del valor Final :
lim x(t ) = lim sX (s )
Multiplicación por tiempo :
t ⋅ x(t ) ↔ −
t →0
s →∞
t →∞
s →0
d
X (s )
ds
Función de Transferencia con la TL:
Si a un sistema con respuesta al impulso unidad h(t), se le aplica a su entrada una señal
exp(st), la respuesta que se obtendrá será:
y (t ) = x(t ) ∗ h(t ) ;
Si x(t ) = exp(st )
y (t ) = exp(st ) ∗ h(t ) =
= exp(st ) ⋅ H (s )
∫
∞
−∞
h(τ )exp(s (t − τ )) ⋅ dτ = exp(st ) ⋅
∫
∞
−∞
h(τ )exp(− sτ ) ⋅ dτ =
Lo que significa que las funciones exp(st ) son funciones propias de
los sitemas LTI y su valor es H (s )
Una clase importante de los sistemas LTI son aquellos en los que la entrada y la salida
están relacionadas mediante una ecuación diferencial de coeficientes constantes:
M
∑
m =0
cm
dm
y (t ) =
dt m
R
∑
gr
r =0
dr
x(t )
dt r
con lo que, tomando la TL, la función de transferencia es una función racional :
H (s ) =
Y (s ) g R s R + g R −1s R −1 + ⋅ ⋅ ⋅ + g1s + g 0
=
X (s ) cM s M + cM −1s M −1 + ⋅ ⋅ ⋅ + c1s + c0
La transformada inversa de Laplace tiene la siguiente expresión:
x(t ) = L −1 [ X (s )] =
1
2πj
σ c + j∞
∫σ
c − j∞
X (s )exp(st ) ⋅ds
σ c ∈ RdC
sin embargo rara vez se utiliza. Lo habitual es hacerlo a partir de tablas de transformadas y
de las propiedades enunciadas de la TL. En el caso habitual de las funciones racionales,
éstas se pueden descomponer en suma de fracciones parciales, mediante el desarrollo de
Heaviside, cuya TL inversa es muy simple.
12
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
A continuación se puede ver una tabla sencilla de pares de transformadas, donde todas las
funciones x(t) son para t > 0, aunque se ha omitido la multiplicación por u(t):
δ (t ) ↔ 1
u (t ) ↔
t↔
1
1
t m −1 ⋅ exp(− at ) ↔
(m − 1)!
(s + a )m
a
1- exp(-at ) ↔
s (s + a )
b−a
exp(-at ) − exp(-bt ) ↔
(s + a )(s + b )
a
sen at ↔ 2
s + a2
s
cos at ↔ 2
s + a2
1
s
1
s2
tm ↔
m!
s m+1
exp(− at ) ↔
1
s+a
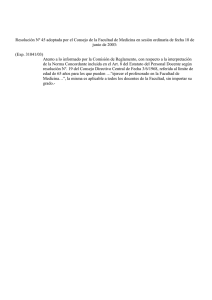
Véase el siguiente ejemplo: supóngase un circuito RC cuya función de transferencia es:
1
H (s ) =
τs + 1
Sea también la señal de entrada :
x(t ) = (1 − cos ωt )u (t )
que es la superposición de la función
coseno con un nivel de continua de 1.
Se puede, por tanto ver la respuesta del
sistema por separado para u (t ) y (cos ωt )u (t )
Cuando la señal de entrada es u (t ) :
1
X1 (s ) = L [u (t )] =
s
1
1
1
∴ Y1(s ) =
= −
s (τs + 1) s s + 1
de donde
(
y1 (t ) = 1 − exp − t
Respuesta de un circuito RC=2.7 a x(t)=(1−coswt)·u(t) (w=6*pi)
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
x (t )
3
y (t )
τ
τ
)
Cuando la señal de entrada es (cos ωt )u (t ), si utilizamos notación compleja,
x2 (t ) → exp( jωt )u (t ) aunque en realidad x2 (t ) = Re[exp( jωt )]u (t )
1
1
1
1 ⎛⎜ 1
1
L [exp( jωt )u (t )] =
; ∴ Y2 (s ) =
⋅
=
−
⎜
s − jω
s − jω τs + 1 1 + jωτ s − jω s + 1
τ
⎝
⎡ 1 − jωτ
⎤
de donde y2 (t ) = Re ⎢
exp( jωt ) − exp − t ⎥ =
2 2
τ
⎣1 + ω τ
⎦
1
=
cos ωt + ωτ ⋅ sen ωt − exp − t
2 2
τ
1+ω τ
De forma que la respuesta total será la superposición de ambas : y (t ) = y1(t ) − y2 (t )
(
(
( ))
⎞
⎟
⎟
⎠
( ))
En la figura se encuentra representada la superposición para ω = 6π y τ = 0.25.
El filtro RC representado tendría la función de transferencia indicada con τ = RC.
13
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
2.
Señales en tiempo discreto
Una señal en tiempo discreto resulta frecuentemente del muestreo a periodo constante de
una señal en tiempo continuo. Pero en cualquier caso, se trata de una secuencia de números
que se indicará como una función de la variable entera n, por ejemplo, x(n).
Si x(n) procede del muestreo de una señal analógica x(t), se tendrá que
siendo Ts el periodo de muestreo
x(n) = x(nTs)
Se ha visto que una señal periódica en tiempo continuo se puede desarrollar en un número,
que puede llegar al infinito, de componentes de frecuencia múltiplos enteros de la
frecuencia fundamental F0.
Sin embargo, cuando se trata de señales en tiempo discreto, existen diferencias
importantes.
x(t ) = exp( j 2π F0 t )
···
···
esta misma señal muestreada con periodo Ts , sería :
x(n ) = exp( j 2π F0 nTs )
el hecho de que n sea entero hace que esta función se repita en frecuencia :
exp( j 2π (F0Ts + 1) n ) = exp( j 2π ⋅ n ) exp( j 2π F0 nTs ) = exp( j 2π F0 nTs )
es decir, una vez muestreada, no se puede distinguir entre una exponencial compleja de
frecuencia original F0 , y otra con frecuencia F0 + 1 = F0 + Fs , lo cual es la misma
Ts
consecuencia que se obtuvo con el teorema de muestreo (muestreo ideal).
En efecto, considérese una función exponencial:
En la figura se puede ver cómo, en efecto, el muestreo de una sinusoide de frecuencia F0 es
el mismo que el que corresponde a otra sinusoide de frecuencia
F0 + Fs.
Sin embargo, por similitud con las señales analógicas, las señales exponenciales discretas
se consideran de la forma exp(j2πfdn), o bien exp(jωd·n). Naturalmente, en este caso ya no
se puede hablar de frecuencia en términos de hertzios o ciclos por segundo, sino
simplemente de ciclos, o si se prefiere, ciclos por muestra, así como la pulsación angular ω
tampoco se puede medir en radianes por segundo, sino en radianes o radianes por
muestra. En estas condiciones, una exponencial (o una función sinusoidal) se repite a cada
unidad de fd o, lo que es lo
mismo, a cada 2π rad de ωd. Por
tanto, el rango de frecuencias va
entre 0 y 1 o entre -½ y +½ (o en
cualquier rango de anchura 1), y
el de pulsaciones angulares entre
0 y 2π , o entre -π y +π, o rango
de igual anchura.
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
14
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
2.1. Señales periódicas en tiempo discreto
Una señal en tiempo discreto es periódica si cumple que:
x p (n ) = x p (n + N )
donde N es el periodo (número entero) de la señal
Conviene recalcar que una señal analógica periódica x p (t ) = x p (t + T0 ) = x p (t + KT0 ) no
tiene necesariamente que dar lugar a una señal periódica cuando se muestrea. Esto sólo
será cierto cuando KT0 = NTs ( K y N , números enteros). No obstante, se puede
considerar sin pérdida de generalidad que K = 1. Así pues, se establece que T0 = NTs .
Por otra parte, tal como se ha indicado, si la señal discreta es periódica ha de cumplirse que
x p (n ) = x p (nTs )
Siendo periódica la señal analógica original, se puede desartrollar en serie de Fourier :
+∞
x p (t ) =
∑ C k exp( jk 2π F0 t )
y en consecuencia, la señal discreta correspondiente será :
k = −∞
+∞
+∞
⎛ 2π ⎞
C k exp⎜ jk
n⎟
N ⎠
⎝
k = −∞
k = −∞
Como se acaba de ver, una exponencial discreta se repite en frecuencia. Aquí, en concreto :
x p (n ) = x p (nTs ) =
∑ C k exp( jk 2π F0Ts n) =
∑
2π ⎞
⎛ 2π ⎞
⎛
n ⎟ = exp⎜ j (k + N )
n ⎟ de forma que si es cierta la serie anterior, es necesario
exp⎜ jk
N ⎠
N ⎠
⎝
⎝
que C k = C k + N . Por tanto, la serie de Fourier correspondiente al caso discreto sólo puede
tener un númeo N de coeficientes independientes.
Por tanto, el desarrollo en serie de Fourier queda convertido en la siguiente expresión :
x p (n ) =
N −1
⎛ 2π ⎞
∑ ck exp⎜⎝ jk N n ⎟⎠
k =0
donde
ck =
+∞
∑ C k +mN
m=− ∞
Si se adopta, como se indicó anteriormente, la pulsación de cada componente como :
ωk = k
2π
; la serie queda en la siguiente forma :
N
x p (n ) =
N −1
∑ ck exp( jω k n)
k =0
con lo que el período del espectro en frecuencia sería de 2π , y ω k +1 − ω k =
2π
N
2.1.1. Espectro: Series de Fourier de señales en tiempo discreto (DTFS)
Obsérvese que el número de muestras del período temporal es igual al número de
coeficientes ck o componentes de un período en el dominio de la frecuencia.
El procedimiento para encontrar los coeficientes ck será similar al caso analógico: en
efecto, si se efectúa la siguiente suma de muestras en un período temporal:
15
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
N −1
2π
⎛
∑ x p (n ) exp⎜⎝ − jl N
n =0
=
N −1 N −1
N −1⎡ N −1
⎞
⎛ 2π
n ⎟ = ∑ ⎢ ∑ c k exp⎜ jk
N
⎠ n =0 ⎢⎣ k =0
⎝
2π
⎞⎤
⎛
n ⎟⎥ exp⎜ − jl
N
⎠⎥⎦
⎝
⎞
n⎟ =
⎠
2π ⎞
n ⎟ =N ⋅ cl
⎠
⎛
∑ ∑ ck exp⎜⎝ j (k − l ) N
k =0 n =0
⎧ N ; a = 1 (k = l )
N −1
2π ⎞
⎪
⎛
n
∑ c k exp⎜⎝ j (k − l ) N n ⎟⎠ = ck ∑ a = ⎨ c 1 − a N = 0 ; a = exp⎛⎜ jm 2π ⎞⎟
n =0
n =0
⎪ k 1− a
N ⎠
⎝
⎩
N −1
ya que :
Es decir, la sumatoria es nula para k ≠ l (m ≠ 0) por ser a N = 1.
N −1
2π ⎞
n⎟
N ⎠
n =0
Evidentemente, se cumple que c k = c k + N
∴ ck =
⎛
∑ x p (n ) exp⎜⎝ − jk
1
N
(
)
así como
en el caso de que x(n ) sea real x(n ) = x * (n ) :
c − k = c k*
Como consecuencia de esto : c − k = c N-k = c k*
⇒ c k = c *N-k
1
Señal
En la figura adjunta se puede ver
un ejemplo de serie de Fourier,
en módulo y fase. Se trata de una
secuencia discreta que conforma
un tren de pulsos tirangulares.
0.5
0
−30
−20
−10
0
10
20
30
40
50
−20
−10
0
10
20
30
40
50
−20
−10
0
10
20
30
40
50
0.4
Para una señal periódica en
tiempo discreto, la potencia
viene dada por el promedio a lo
largo de un período del módulo
al cuadrado de los valores
discretos de dicha señal:
P=
P=
=
1
N
1
N
N −1 ⎡
∑
N −1
∑x
p
(n )
2
0.2
0.1
0
−30
4
2
Fase
espectral
de
potencia: Teorema de Parseval
para señales discretas
Módulo
0.3
2.1.2. Densidad
0
−2
−4
−30
De forma análoga al caso de señales en tiempo continuo :
n =0
N −1
∑
x p (n ) =
2
n =0
* 1
⎢c k
N
k =0 ⎣
1
N
N −1
∑
n =1
x p (n ) ⋅x *p (n ) =
1
N
N −1 ⎡
N −1
2π ⎞⎤
⎛
(
)
x
n
⋅
ck* exp⎜ − jk
n ⎟⎥ =
⎢ p
N ⎠⎦
⎝
n =0 ⎣
k =0
∑
∑
N −1
2π ⎞⎤ N −1 *
⎛
x p (n )exp⎜ − jk
n ⎟⎥ = ck ⋅ ck =
ck
N
⎝
⎠
n =0
k =0
⎦ k =0
N −1
∑
∑
∑
2
16
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
2.2. Señales Aperiódicas en Tiempo Discreto
2.2.1. Espectro: Transformada de Fourier en Tiempo Discreto (DTFT)
Así como en las señales en tiempo continuo se llega a la definición de TF a partir de las
series de Fourier para señales periódicas haciendo tender el período al infinito, en las
señales discretas este mismo proceso desemboca en la Transformada de Fourier en tiempo
discreto (DTFT). Es decir, en el caso discreto, lo que se hace tender al infinito es el periodo
numérico N y en consecuencia, el espectro discreto definido en 2.1 se convierte en un
espectro continuo. En efecto, ωk+1 - ωk = 2π /N Æ 0. Será por tanto la pulsación ωk la que
adquiere carácter continuo y denominaremos ω:
2π
k
→ ω = 2π ⋅ f ⇒ f =
N → ∞ ⇒ ωk = k ⋅
N
N
De la misma forma que en las señales en tiempo continuo, la DTFT no debe promediar en
el periodo N puesto que entonces el espectro quedaría reducido a cero cuando el periodo se
extiende hasta el infinito. Esto es, como se verá más adelante, en este caso no
representamos la potencia, sino la energía. Así pues, si los coeficientes espectrales ck de las
señales periódicas discretas tenían la expresión:
ck =
1
N
N −1
⎛
∑ x p (n ) exp⎜⎝ − jk
n =0
2π ⎞
n⎟
N ⎠
la DTFT tendrá la que sigue:
(
) ∑ x(n)exp(− j 2πfn )
X e j 2π f =
( ) ∑ x(n)exp(− jωn)
+∞
X e jω =
o bien
n = −∞
+∞
n = −∞
El hecho de que la DTFT se simbolice como función de una exponencial ejω o su
equivalente en términos de frecuencia, obedece a ser, como se verá más adelante, una
particularización de la transformada Z.
Es importante observar que el espectro de las señales discretas aperiódicas es continuo.
Además, el espectro es periódico en frecuencia pues consiste en una suma de
exponenciales discretas que, como se ha visto, son periódicas con período de 2π radianes
según la pulsación ω. Esta periodicidad es también una consecuencia del teorema de
muestreo.
Siendo función periódica respecto a la variable ω, X(ejω ) es susceptible de ser desarrollada
en serie de Fourier y, de hecho, la expresión arriba indicada de la TF tiene la forma de
desarrollo en serie de Fourier de X(ω) cuyos coeficientes son los valores de x(n). En
consecuencia, la obtención de la transformada inversa es inmediata:
∫2π
=
( )
X e jω exp( jωm ) ⋅ dω = ∫
⎡ +∞
⎤
x(n ) exp(− jωn )⎥ exp( jωm ) ⋅ dω =
⎢
∑
2π
⎣⎢n = −∞
⎦⎥
+∞
∑ ⎡⎢⎣ x(n)∫2π exp(− jω (n − m )) ⋅ dω ⎤⎥⎦
n = −∞
Es sabido que
⎧0
∫2π exp(− jω (n − m )) ⋅ dω = ⎨⎩2π
para
n≠m
para n = m
17
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
2.2.2. Densidad espectral de Energía
+∞
∑ x (n )
E=
2
=
n = −∞
=
1
2π
=
1
2π
⎡ 1
∑ x (n ) ⋅ x * (n ) = ∑ x (n ) ⋅ ⎢⎣ 2π ∫ 2π X * (e jω )exp (−
n = −∞
n = −∞
+∞
+∞
( )
∫ 2π
⎡ +∞
⎤
1
X * e jω ⋅ ⎢ ∑ x (n ) exp (− jω n )⎥ ⋅ d ω =
2π
⎢⎣ n = −∞
⎥⎦
∫ 2π
X e jω
( )
2
( )
∫2π
( )
X e jω exp( jωm ) ⋅ dω =
( )
x(n ) =
(e ω )⋅ X (e ω )⋅ dω =
j
*
j
⋅ dω
La función S xx (ω ) = X e jω
∴
∫ 2π X
⎤
jω n ) ⋅ d ω ⎥ =
⎦
2
se denomina Densidad E spectral d e Energía .
+∞
∑ ⎡⎢⎣ x(n )∫2π exp(− jω (n − m)) ⋅ dω ⎤⎥⎦ = 2π ⋅ x(m)
n = −∞
(
)
1
X e jω exp( jωn ) ⋅ dω = ∫ X e j 2π f exp( j 2πfn) ⋅ df
1
2π ∫ 2π
La TF converge siempre que la secuencia x(n ) sea absolutamente sumable :
∴
+∞
∑
x(n ) < ∞
lo que, a su vez, garantiza que la energía es finita :
E=
n = −∞
+∞
∑ x(n)
2
<∞
n = −∞
Otras consideraciones similares a las que se hicieron en tiempo continuo son :
• para ω = 0;
+∞
X (0) =
• Si x(n ) es real ⇒
(
∑ x(n )
n =-∞
)
( )
X e − jω = X * e jω
( )
con lo que X e jω es una función par
( ( )) es una función impar, es decir, X (e ω ) es hermitiana.
mientras que arg X e jω
j
2.2.3. Ejemplo: pulso rectangular en tiempo discreto
( ) ∑ x(n)exp(− jωn) =
0
1 − exp(− jLω )
= ∑ exp(− jωn ) =
=
1 − exp(− jω )
n =0
L −1
(1 )
) sen (21Lω)
sen 2 ω
5
10
15
20
25
30
35
40
10
5
0
−10
−8
−6
−4
−2
0
2
4
6
8
10
−8
−6
−4
−2
0
2
4
6
8
10
4
2
Fase
= exp − j 12 (L − 1)ω
0
15
+∞
n = −∞
(
0.5
Módulo
X e jω =
1
Señal
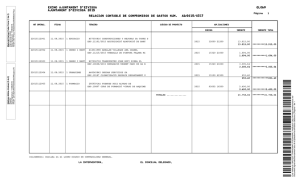
En la figura se puede ver un
pulso rectangular de amplitud
unidad y una anchura de doce
muestras (L = 12). La TF de esta
señal se puede cuantificar de la
siguiente forma:
0
−2
−4
−10
18
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Función que se encuentra representada en la figura en módulo y fase. El resultado de la
transformada inversa se ha representado mediante pequeños círculos sobre la señal
original, pudiéndose comprobar que coincide exactamente con ella.
2.2.4. Convolución y Correlación
Se define la convolución para señales discretas de la siguiente forma:
+∞
∑ x (m)x (n − m)
x1 (n ) ∗ x2 (n ) =
1
2
m= −∞
La convolución es conmutativa, asociativa y distributiva con la suma.
Asimismo, se define la correlación cruzada rxy(n) entre dos señales x(n) e y(n) como:
rxy(n) = x(n)∗ y(-n)
En el caso en que y(n) = x(n) , se denomina autocorrelación (rxx(n)).
2.2.5. Propiedades de Simetría de la DTFT
En el caso más general en que la señal discreta sea compleja, denotando con el subíndice R
la parte real y con I la Parte imaginaria, se puede escribir:
x(n ) = x R (n ) + jx I (n )
( )
( )
( )
X e jω = X R e jω + jX I e jω
Y de forma completamente análoga a lo que se se hizo para señales en tiempo continuo,
( )
X (e ω ) = X (e ω ) + jX (e ω )
X (e ω ) = ∑ x(n ) cos ωn = [X (e ω ) + X (e ω )]
( )
( )
también en genral X e jω se puede descomponer en partes par X e e jω e impar X o e jω :
j
j
e
e
siendo :
j
o
+∞
j
n = −∞
+∞
−j
j
1
2
( ) ∑ x(n)senωn = − j[X (e ω ) − X (e ω )]
X o e jω = −
n = −∞
−j
j
1
2
ya que exp(− jωn ) = cosωn − jsenωn
Ahora bien, en el caso habitual en que x(n ) sea real, ha de cumplirse que :
( )
( )
X e e jω = X R e jω ;
( )
( )
X o e jω = X I e jω
lo que viene a demostrar la simetría hermitiana de la TF de las señales discretas reales,
ya enunciada :
( ) ( )
arg[ X (e ω ) ] = − arg[ X (e ω ) ]
S (ω ) = X (e ω ) = S (e ω )
X e jω = X e − jω
( )
(
X e jω = X * e − jω
)
⇒
−j
j
xx
j
2
xx
−j
En la siguiente Tabla se encuentran resumidas las propiedades de simetría más importantes
19
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Propiedade s de Simetría de la DTFT
Propiedade s de Simetría de la DTFT
( )
x (n ) ↔ X (e ω )
x (− n ) ↔ X (e ω )
x (n ) ↔ [X (e ω )+ X (e ω )]
jx (n ) ↔ [X (e ω )− X (e ω )]
[x(n ) + x (− n )] ↔ X (e ω )
[x(n ) − x (− n )] ↔ jX (e ω )
( ) ( )
X (e ω ) = X (e ω )
X (e ω ) = − X (e ω )
X (e ω ) = X (e ω )
arg [X (e ω )] = − arg [X (e ω )]
[x (n ) + x (− n )] ↔ X (e ω )
[x (n ) − x (− n )] ↔ jX (e ω )
para x (n ) Real :
para cualquier señal x (n ) :
X e jω = X * e − jω
x (n ) ↔ X e jω
*
−j
*
*
*
R
I
1
2
1
2
1
2
1
2
*
j
j
j
*
R
I
I
−j
−j
j
−j
j
−j
*
−j
R
j
I
−j
*
j
R
j
j
j
1
2
R
1
2
I
j
2.2.6. Propiedades y Teoremas de la DTFT.
Se pueden comprobar las siguientes propiedades y teoremas:
( )
Notación :
x(n ) ↔ X e jω
Superposición :
a1x1 (n ) + a2 x2 (n ) ↔ a1 X1 e jω + a2 X 2 e jω
Conjugadas :
x* (n ) ↔ X * e − jω
( )
( )
( )
Desplazamiento en el tiempo : x(n − l ) ↔ exp(− jωl )X e jω
Inversión en el tiempo :
x(− n ) ↔ X (− ω )
Traslación en frecuencia :
exp( jω n ) x(n ) ↔ X e j (ω −ω0 )
(
0
Modulación :
Derivación en frecuencia :
x(n )cos ω0n ↔
nx(n ) ↔ j
1
2
[X (e (
j ω +ω0 )
( )
)
)+ X (e (ω ω ) )]
j
−
0
dX e jω
dω
( ) ( )
(n ) = x (n ) ∗ x (− n ) ↔ X (e ω )⋅ X (e ω )
Convolución :
x1 (n ) ∗ x2 (n ) ↔ X1 e jω ⋅ X 2 e jω
Correlación :
rx1 x2
Wiener - Khintchine :
( )
−j
j
1
rxx (n ) ↔ S xx (ω )
2
1
2
2.2.7. Funciones elementales.
Las funciones elementales más comúnmente
utilizadas son la función impulso unidad en tiempo
discreto y la función escalón unidad.
El impulso unidad viene a sustituir a la delta de
Dirac, pero es un concepto más sencillo y su uso
matemático menos complejo. Se define así:
δ(n)
u(n)
para n = 0
⎧1
para n ≠ 0
⎩0
Igual que la delta de Dirac, δ(n) tiene la propiedad: x(n) = x(n) * δ(n)
δ (n ) = ⎨
20
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
El escalón unidad o escalón simplemente se define como:
para n ≥ 0
para n < 0
⎧1
u (n ) = ⎨
⎩0
∞
u (n ) = ∑ δ (n − m )
m =0
Igual que en tiempo continuo, se pueden definir la función signo y la función pulso, pero
tienen algunas peculiaridades: la función signo se define con valor 1 para n positivo, -1
para n negativo y 0 para n = 0. La función pulso no se centra en el origen a no ser que el
número de muestras sea impar.
Resultan útiles también algunas otras funciones, tales como:
Función rampa unidad
⎧n
u r (n ) = ⎨
⎩0
Función exponencial :
an
para n ≥ 0
para n < 0
2.2.8. Transformada Discreta de Fourier (DFT)
Hasta ahora se han visto diversas formas de estimación espectral dependiendo de la
naturaleza de las señales, si se trata de funciones en tiempo continuo o en tiempo discreto o
si son periódicas o aperiódicas. Quizá convenga recapitular en este punto algunas
consideraciones:
- Las señales en tiempo continuo tienen espectros aperiódicos.
- Las señales en tiempo discreto tienen espectros periódicos.
- Las señales periódicas tienen espectros discretos.
- Las señales aperiódicas tienen espectros continuos.
La discretización y digitalización de las señales o el muestreo es el recurso fundamental
para poder procesar señales mediante un computador o procesador digital, ya que con ello
se consigue convertir las señales en secuencias de números. Es a esto a lo que realmente se
denomina Procesado Digital de Señal (DSP) y que tanta relevancia ha cobrado en los
últimos años.
Pero como se ha visto y se acaba de señalar, sólo las señales periódicas tienen espectros
discretos, de forma que la DTFT o Transformada de Fourier de señales aperiódicas en
tiempo discreto da lugar a funciones continuas que no son fácilmente tratables mediante
computador a no ser que se discreticen. Este es justamente el propósito de la Transformada
Discreta de Fourier (DFT).
Supóngase que x(n ) es de longitud limitada L. En este caso la TF será :
( )
X e jω =
L −1
∑ x(n )exp(− jωn )
n =0
( )
Si muestreamos X e jω con muestras equiespaciadas, se puede hacer :
2πk
ωk =
k = 0, 1, 2, ··· , N − 1 siendo N ≥ L el número de muestras por periodo.
N
⎛ 2πk ⎞
L −1
2πk ⎞
⎛
⎜
⎟
N
(
)
X e
= X k = ∑ x(n )exp⎜ − j
n⎟
k = 0, 1, 2, ··· , N − 1
⎜
⎟
N ⎠
⎝
=
n
0
⎝
⎠
21
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Ya que N ≥ L s puede extender por conveniencia la TF hasta N :
N −1
X (k ) =
x(n ) =
2π
⎛
∑ x(n)exp⎜⎝ − j N
n =0
N −1
1
N
⎞
kn ⎟
⎠
⎛ 2π
∑ X (k )exp⎜⎝ j N
k =0
⎞
kn ⎟
⎠
k = 0, 1, 2, ··· , N − 1
n = 0, 1, 2, ··· , N − 1
2π ⎞
⎛
N
y haciendo exp⎜ − j
⎟ = WN = 1 , se puede escribir :
N
⎝
⎠
N −1
X (k ) =
∑ x(n)WNkn
k = 0, 1, 2, ··· , N − 1
n =0
N −1
1
∑ X (k )WN− kn n = 0, 1, 2, ··· , N − 1
N k =0
Realmente, el hecho de haber discretizado el espectro resulta equivalente a haber
convertido la señal x(n) en una señal periódica xp(n), haciendo que x(n) se repita cada N
muestras. Por eso es importante que N sea superior a la longitud L de la secuencia x(n),
pues de lo contrario, existiría solapamiento entre los sucesivos períodos y ya no se podría
recuperar x(n) a partir de xp(n).
x(n ) =
x p (n ) =
+∞
∑ x(n − rN )
r =−∞
En efecto, si se comparan las expresiones de la DFT con las que se obtuvieron para las
DTFS, se puede comprobar que son idénticas.
2.2.9. Ejemplo de DFT: Pulso Rectangular.
2π ⎞
⎛
X (k ) = ∑ x(n ) exp⎜ − j
nk ⎟ =
N
⎝
⎠
n =0
1
Señal
Se tiene un pulso rectangular de 9 puntos.
La DFT la hacemos para N = 80 puntos,
tal como se ve en la figura.
0.5
0
N −1
10
20
30
40
50
60
70
80
0
10
20
30
40
50
60
70
80
0
10
20
30
40
50
60
70
80
6
Módulo
(
)
2π ⎞
⎛
N =
= ∑ exp⎜ − j
nk ⎟ =
N
⎝
⎠ 1 − exp(− jk 2π )
N
sen (k 9π )
80
= exp(− jk π )
10 sen (k π )
80
1 − exp − jk 2πL
L −1
0
8
4
2
0
n =0
4
Fase
2
0
−2
−4
2.2.10. Convolución Circular.
Cuando se aplica la DFT de N puntos, se puede comprobar que la DFT-1 del producto de
dos funciones en el dominio de la frecuencia no se corresponde con la convolución lineal
de las correspondientes señales en el dominio del tiempo. Lo que resulta, sin embargo, es
la denominada convolución circular que se define de la siguiente forma:
x1 (n ) ⊗ N x2 (n ) =
N −1
x (m ) ⋅x ((n − m ))N
∑
m
1
2
donde x((n ))N ≡ x(n, módulo N )
=0
Al igual que la convolución lineal, la convolución circular es conmutativa, distributiva y
asociativa respecto a la suma.
22
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
2.2.11. Propiedades de simetría de la DFT.
Son similares a las vistas para la DTFT, pero con las diferencias inherentes a la traslación
circular. En estas circunstancias, para secuencias de N puntos se tiene:
x((− n ))N = x( N − n )
Inversión temporal :
x(n ) = x( N − n )
Función circularmente par :
x(n ) = − x( N − n )
Función circularmente impar :
En la tabla que se da a continuación se encuentran las principales propiedades de simetría
de la Transformada Discreta de Fourier.
Propiedades de Simetría de la DFT
para cualquier señal x(n ) :
Propiedades de Simetría de la DFT
x(n ) ↔ X (k )
X (k ) = X * ( N − k )
para x(n ) Real :
X R (k ) = X R ( N − k )
x * (n ) ↔ X * ( N − k )
X I (k ) = − X I ( N − k )
x ( N − n ) ↔ X (k )
*
*
[X (k ) + X (N − k )]
jx (n ) ↔ [X (k ) − X ( N − k )]
[x(n) + x (N − n)] ↔ X (k )
[x(n) − x (N − n)] ↔ jX (k )
x R (n ) ↔
I
1
2
1
2
1
2
*
1
2
*
X (k ) = X ( N − k )
*
arg[ X (k )] = − arg[X ( N − k )]
*
[x(n ) + x(N − n )] ↔ X R (k )
1[ ( )
x n − x( N − n )] ↔ jX I (k )
2
1
2
R
I
2.2.12. Propiedades y Teoremas de la DFT
Notación :
Periodicidad :
Superposición :
x(n ) ↔ X (k )
x(n ) = x(n + N ) ↔ X (k ) = X (k + N )
a1 x1 (n ) + a 2 x 2 (n ) ↔ a1 X 1 (k ) + a 2 X 2 (k )
Conjugadas :
x * (n ) ↔ X * ( N − k )
2π ⎞
⎛
Desplazamiento en el tiempo : x((n − l )) N ↔ exp⎜ − j
kl ⎟ X (k )
N ⎠
⎝
Inversión en el tiempo :
x( N − n ) ↔ X ( N − k )
Convolución circular :
⎛ 2π
⎞
exp⎜ j
l ⋅ n ⎟ x(n ) ↔ X ((k − l )) N
⎝ N
⎠
x1 (n ) ⊗ N x 2 (n ) ↔ X 1 (k ) ⋅ X 2 (k )
Correlación circular :
x1 (n ) ⊗ N x 2* (− n ) ↔ X 1 (k ) ⋅ X 2* (k )
Traslación en frecuencia :
Producto de dos secuencias : x1 (n ) ⋅ x 2 (n ) ↔
N-1
Teorema de Parseval :
∑ x(n ) ⋅ y * (n) =
n =0
1
X 1 (k ) ⊗ N X 2 (k )
N
1
N
N-1
∑ X (k ) ⋅ Y * (k )
k =0
23
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
2.2.13. Transformada Rápida de Fourier (FFT).
Como se ha podido ver, la transformada discreta de Fourier (DFT) es un proceso que
involucra una cantidad de sumas y multiplicaciones de números complejos. Éstas últimas
que son las que representan la mayor parte del costo computacional se producen en un
número igual al cuadrado de la longitud de la secuencia a procesar (N2), de forma que los
algoritmos capaces de aligerar esta carga son de gran importancia en el proceso digital de
señales y se enmarcan en lo que se denomina Transformada Rápida de Fourier o FFT.
Lo que se describe a continuación es el algoritmo Danielson y Runga.
El algoritmo consiste en separar la suma de la transformada en pares e impares y parte de
la base de que el número de puntos es una potencia de dos: N = 2p con p entero.
X (k ) =
N −1
∑ x(n)W
kn
N
k = 0, 1, 2, ··· , N − 1
n =0
X (k ) =
N −2
∑
N −1
∑ x(n)W
x(n )WNkn +
n =0
n par
kn
N
n =1
n impar
Haciendo el cambio de variable n = 2r en la suma de los pares y n = 2r + 1 en la de impres :
X (k ) =
N
−1
2
∑ x(2r )
WN2 kr
N
−1
2
∑ x(2r
+
r =0
+ 1 WNk (2 r +1)
)
=
r =0
N
−1
2
∑ x(2r )
r =0
WN2 kr
+ WNk
N
−1
2
∑ x(2r + 1)W
2 kr
N
r =0
⎛
2π
2π ⎞⎟
⎛
⎞
WN2 kr = exp⎜ − j
2kr ⎟ = exp⎜⎜ − j
kr ⎟ = WNkr
2
N
N
⎝
⎠
2 ⎠
⎝
∴ X (k ) =
N
−1
2
∑ x(2r )W
r =0
kr
N
2
+ WNk
N
−1
2
∑ x(2r + 1)W
r =0
kr
N
2
la primera de las sumas de la expresión anterior es la DFT de la secuencia formada por las
muestras de índice par de x(n), mientras que la segunda es la DFT de la secuencia formada
por las muestras de índice impar. Representaremos como G(k) la DFT de la secuencia de
los N/2 puntos pares, y como H(k) la DFT de la secuencia de los N/2 puntos impares:
En estas circunstancias, para realizar la DFT se puede emplear el esquema de la siguiente
X (k ) = G (k ) + WNk H (k )
k = 0, 1, 2, ··· , N 2 − 1
Pero con ésto sólo se han obtenido la mitad de las muestras de X (k ). Sin embargo, dado que
G (k ) y H (k ) han de ser periódicas con periodo N 2 , para k > N 2 se puede hacer :
X (k ) = G (k − N 2 ) + W Nk H (k − N 2 )
k = N 2 , N 2 + 1, N 2 + 2, ··· , N − 1
figura, en la que las flechas que no llevan un peso asociado significa que el peso es igual a
1. En cada rama la variable se multiplica por su peso y se suman en los puntos de
convergencia.
24
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
x(0)
G(0)
x(2)
G(1)
W N0
G(2)
W N1
x(4)
DFT de
N/2
puntos
W N2
G(N/2-1)
x(N-2)
X(0)
X(1)
X(2)
X(N/2-1)
WNN/2-1
x(1)
H(0)
x(3)
H(1)
WNN/2
H(2)
WNN/2+1
x(5)
x(N-1)
DFT de
N/2
puntos
WNN/2+2
H(N/2-1)
X(N/2)
X(N/2+1)
X(N/2+2)
X(N-1)
WNN-1
Una vez hecho esto, se puede repetir el mismo procedimiento con x(0), x(2), x(4), ··· , x(N2) para obtener G(0), G(1), G(2), ··· , G(N/2-1), así como con x(1), x(3), x(5), ··· , x(N-1)
para obtener H(0), H(1), H(2), ··· , H(N/2-1). De esta forma, cada uno de los bloques
generadores de DFT de la figura quedarían convertidos en un esquema análogo al de la
figura completa, cuyos bloques, a su vez, tendrían longitud N/4. Realizando esta
sustitución sucesivamente, el algoritmo para la realización de FFT seguiría el esquema de
la siguiente figura:
x(0)
X(0)
x(4)
X(1)
x(2)
X(2)
x(6)
X(3)
WMr
WM(r+M/2)
x(1)
X(4)
x(5)
X(5)
x(3)
X(6)
x(7)
X(7)
en la que la estructura básica es la que se ha aislado a la derecha y que recibe el nombre de
mariposa, donde le subídice M de W representa la fracción de N que corresponde a la etapa
donde se encuentre.
25
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Conviene recalcar que el orden en que aparecen las entradas es el resultado de hacer un
barajado perfecto del orden primitivo y éste se obtiene fácilmente escribiendo al revés los
bits del número de orden en binario. Esto es, por ejemplo, en el caso de la figura con N = 8:
000 001 010 011 100 101 110 111 Î 000 100 010 110 001 101 011 111
0
1
2
3
4
5
6
7
Î
0
4
2
6
1
5
3
7
Es posible todavía realizar mejoras sensibles en el algoritmo descrito. En efecto, si se
observan los pesos que aparecen en la mariposa:
2π M ⎞
⎛
(r + M )
⋅ ⎟ = WMr exp(− jπ ) = −WMr
WM 2 = WMr exp⎜ − j
2 ⎠
M
⎝
Por consiguiente, la mariposa puede ser sustituida más eficiente mente por otra con la
estructura de la figura que se ve a continuación:
WMr
Ù
WMr
WM(r+M/2)
-1
evidentemente, el factor –1 también representa una multiplicación, pero no es compleja y
sólo consiste en un cambio de signo, con lo cual, dos multiplicaciones complejas se ha
reducido a solamente una.
X(0)
x(0)
x(4)
W20
X(1)
-1
W40
x(2)
X(2)
-1
x(6)
W20
W41
X(3)
-1
-1
W80
x(1)
X(4)
-1
x(5)
W20
W81
W40
x(3)
W82
-1
x(7)
W20
W41
-1
X(5)
-1
-1
X(6)
-1
W83
-1
X(7)
-1
En la figura se han señalado todos los factores, sin embargo, si se tiene en cuenta que
WM0 = 1;
del diagrama desaparecen W20 , W40 y W80
26
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
A medida que la longitud de la cadena N se hace mayor, la proporción de factores que se
reducen a la unidad disminuye. Así pues, en un caso general se puede afirmar que el
número de multiplicaciones complejas que representa la mayor parte de la carga
computacional del algoritmo descrito para FFT, es inferior a
N
log 2 N
2
lo que representa una importante reducción puesto que inicialmente era N 2 .
2.3. Sistemas Discretos.
Un sistema discreto es un transformación u operador que asigna a una secuencia de entrada
x(n) una secuencia de salida y(n). Las características de los sistemas que se ven a
continuación son prácticamente una repetición de lo que se vio para sistemas analógicos.
2.3.1. Sistemas Lineales e Invariantes en el Tiempo (LTI).
Esto es, si x(n ) es la señal de entrada, la señal de salida y (n ) vendrá dada por :
y (n ) = T [x(n )]
x(n)
T[ ]
y(n)
Un sistema se dice que es real si siendo x(n ) real ⇒ y (n ) también es real
Un sistema se dice que es lineal si : T [a1 ⋅ x1 (n ) + a2 ⋅ x2 (n )] = a1 ⋅ T [x1 (n )] + a2 ⋅ T [x2 (n )]
Un sistema se dice que es invariante en el tiempo si : T [x(n − nd )] = y (n − nd )
Un sistema se dice que es causal si siendo x(n ) = 0 para n < 0 ⇒ y (n ) = 0 para n < 0
h (n ) = L[δ (n )]
En efecto, si x (n ) es la entrada del sistema L[
]:
+∞
⎡ +∞
⎤
y (n ) = L[x (n )] = L[x (n ) ∗ δ (n )] = L ⎢ ∑ x (m ) ⋅δ (n − m )⎥ = {lineal} = ∑ x (m ) ⋅ L[δ (n − m )] =
m = −∞
⎣⎢ m = −∞
⎦⎥
= {invariante temporal } =
+∞
∑ x(m ) ⋅ h(n − m ) =x(n ) ∗ h(n )
m = −∞
Lo que deja claro que con la respuesta al impulso h (n ) es posible
obtener la respuesta a cualquier función de entrada.
Si además se toma en ambos mienbros la transform ada
de Fourier (DTFT) :
h1(n)
h2(n)
H1(ω)
H2(ω)
h1(n)* h2(n)
Y (ω ) = X (ω ) ⋅ H (ω ) donde H (ω ) = TF [h (n )]
es la Función de Transferen cia del sistema.
Esta circunstan cia pone de manifiesto que las funciones de
H1(ω)· H2(ω)
transfere ncia en cascada se multiplica n como indica la figura.
Si un sistema es lineal e invariante en el tiempo (para distinguirlo L[ ] ), quedará
completamente caracterizado por su respuesta al impulso unidad:
Se denomina sistema BIBO (Bounded input – Bounded output) a todo sistema tal que a
cualquier secuencia acotada de entrada responde con una secuencia acotada de salida.
Un sistema BIBO es estable si y sólo si
S=
∞
∑ h(n)
es finito.
n = −∞
27
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Una subclase importantísima de los sistemas LTI son los que se caracterizan por una
ecuación en diferencias finitas con coeficientes constantes:
N
M
∑ a y(n − k ) = ∑ a y(n − r )
k =0
k
a0 ≠ 0
r
r =0
2.3.2. Transformada z.
La Transformada z juega para los sistemas discretos el mismo papel que la transformada de
Laplace para los sistemas analógicos.
Si se introduce a la entrada de un sistema LTI una secuencia exponencial de la forma:
x(n ) = z n
se tendrá, siendo h(n ) la respuesta al impulso del sistema en cuestión :
y (n ) = x(n ) ∗ h(n ) =
Llamando H ( z ) =
+∞
∑ h(m)z
m = −∞
+∞
n−m
∑ h(m)z −m
n
=z ⋅
+∞
∑ h(m)z −m
m = −∞
⇒
y (n ) = z n ⋅ H ( z )
m = −∞
luego la respuesta a una función exponencial, sea cual fuere el sistema LTI, es otra función
exponencial cuyo módulo y fase depende del sistema.
( )
Si se hace z = exp( jω ), se obtiene la respuesta en frecuencia : y (n ) = exp( jωn )H e jω
Se define la Transformada z de la siguiente forma :
Ζ [x(n )] =
+∞
∑ x(n)z −n
n = −∞
Si se hace aquí de nuevo la sustitución z = exp( jω ), se llega a la misma expresión que la
Transformada de Fourier (DTFT) :
( )
Y e jω =
+∞
∑ x(n)exp(− jωn)
n = −∞
Así pues, como sucedía con la TL, la Transformada z (Tz) se puede considerar como una
extensión de la TF a todo el plano complejo: r·exp(jω).
Por esta razón se ha empleado la siguiente notación en señales y sistemas discretos
X(ejω)
pues de esta forma se pone de manifiesto la particularización que se lleva a cabo en la Tz
para obtener la TF.
Im[z]
En la disposición sobre el plano complejo existen diferencias
sustanciales entre la TL y la Tz. Como se puede observar en
1
la figura, cuyos ejes son la parte real de z y la parte imaginaria
Re[z]
de z, cuando se representa el dominio particular de la
frecuencia: z = exp(jω) lo que se dibuja es la circunferencia
de radio unidad representada con linea discontinua en la
figura. No es ésta uno de los ejes como sucedía con la TL. Esto confirma la naturaleza
periódica del espectro de las funciones discretas. Naturalmente, la TF existirá siempre y
cuando la circunferencia de radio unidad se encuentre dentro de la región de convergencia
(RdC) de la Tz.
28
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
Como ejemplo, considerese la siguiente función:
x(n ) = a n
[ ] ∑a
+∞
+∞
n
⎛a⎞
⎜ ⎟ que no converge para ningún valor de z.
n = −∞
n =−∞ ⎝ z ⎠
Sin embargo, la misma función, haciendo x(n ) = 0 para t < 0 (secuencia a derechas ) :
X (z ) = Ζ[x(n )] = Ζ a n =
n
⋅ z −n =
∑
⎧∞ para z ≤ a
n
⎪
⎛a⎞
z
X (z ) = Ζ a ⋅ u (n ) =
a ⋅z = ⎜ ⎟ =⎨ 1
=
para z > a
z
⎝
⎠
n =0
n =0
⎪1 − a
z−a
z
⎩
luego la RdC en este caso es z > a.
Im[z]
En la figura se ha representado esta RdC para par un valor
de a < 1, caso en el que la circunferencia de radio unidad
RdC
se encuentra dentro de la RdC Î existe la TF.
a 1
Ahora bien, si por lo contrario, la secuencia existiera para
n < 0 pero fuera 0 para n ≥ 0 (secuencia a izquierdas), la
RdC sería entonces la complementaria a la del caso
anterior, como se ve a continuación y se representa en la
figura, donde también en este caso se ha elegido un valor
de a tal que la RdC incluya la circunferencia de radio 1:
Im[z]
[
[
n
] ∑
+∞
−∞
+∞
∑
−n
] ∑a
X (z ) = Ζ a ⋅ u (− n − 1) =
n
n
n
⋅z
n = −1
−n
( )
−∞
n
⎛a⎞
=
⎜ ⎟ =
n =−1⎝ z ⎠
∑
Re[z]
RdC
⎧∞ para z ≥ a
⎪
z
=⎨ 1
para z < a
=
⎪ a −1 a − z
⎩ z
1 a
Re[z]
( )
Im[z]
En ambos casos la función de transferencia tiene un polo
(lugar donde la función se hace infinita Ù el denominador
se hace 0) en z = a. Los polos se han señalado con un aspa
en cada figura. Sin embargo, la secuencia a derechas
converge en el exterior de la circunferencia que, con
centro en el origen, pasa por el lugar del polo. Por lo
contrario, la secuencia a izquierdas converge en el interior
de dicha circunferencia.
a
1 b
Re[z]
La RdC de una suma de funciones es como mínimo la intersección de las RdC de cada una
de las funciones. Así pues para una secuencia de la forma
x(n ) = a n ⋅ u (n ) + b n ⋅ u (− n − 1)
Según lo visto, su Tz será la siguiente :
z
z
−
RdC : a < z < b (ver figura )
z −a z −b
puesto que la RdC del primer sumando es z > a y la del segundo z < b.
X (z ) =
29
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
La transformada z inversa se puede obtener mediante la integración a lo largo de una
linea cerrada que encierre al origen de coordenadas, de la siguiente expresión:
x(n ) =
1
X ( z )z n−1 ⋅ dz
∫
C
2πj
Sin embargo, ta Tz inversa rara vez se lleva a cabo mediante esta integral. Lo más normal
es hacer uso tablas de transformadas junto con las propiedades de al Tz que se dan a
continuación, y la descomposición de las expresiones racionales en fracciones parciales
mediante el desarrollo de Heaviside. Dado que las ecuaciones en diferencias finitas con
coeficientes constantes siempre dan lugar a expresiones racionales, la descomposición en
fracciones resulta el procedimiento más usado. No obstante, puesto que es deseable que las
fracciones parciales queden en la forma Kz/(z-a) debido a que su (Tz) –1 es una función
exponencial como se acaba de ver, y no en la forma del desarrollo de Heaviside K/(z-a), el
procedimiento consistirá en realizar dicho desarrollo no sobre la función X(z) cuya (Tz) –1
se pretende obtener, sino sobre X(z)/z.
Volviendo a la RdC, se puede deducir que la RdC de una secuencia a derechas será el
exterior de la circunferencia que, con centro en el origen de coordenadas, pase por el polo
más distante del mismo. En efecto, que si se hace la descomposición en fracciones
parciales, resulta una suma de funciones, cada cual con RdC establecida por sus
respectivos polos. El exterior de la mayor circunferencia es la intersección de dicahs
regiones. En el caso de secuencia a izquierdas, la RdC sería el interior de la circunferencia
que pase por el polo más cercano al origen. Si fuese suma de secuencias unas a derechas y
otras a izquierdas, habría que separar unas de otras y hacer la intersección de las regiones
de convergencia de ambas partes.
2.3.3. Propiedades de la Tz.
A continuación se presenta una tabla resumen de las propiedades de la Tz. En dicha tabla
se señala también la RdC asociada.
x(n ) ↔ X ( z )
RdC : r2 < z < r1
Superposición :
Despl. en el tiempo :
a1x1 (n ) + a2 x2 (n ) = a1 X 1 ( z ) + a2 X 2 ( z ) RdC : RdC1 ∩ RdC 2
x(n − k ) ↔ z − k X ( z ) RdC :
k > 0 ⇒ la de X ( z ) excepto z = 0
k < 0 ⇒ la de X ( z ) excepto z = ∞
( ) RdC : a r < z < a r
1
1
Inversión temporal :
RdC :
x(− n ) ↔ X (z )
< z <
r
r
Conjugados :
x (n ) ↔ X (z )
RdC : r < z < r
Parte real :
Re [x(n )] ↔ [X ( z ) + X (z )]
RdC : Incluye a r < z < r
Parte imaginaria :
Im [x(n )] ↔ [X ( z ) − X (z )]
RdC : Incluye a r < z < r
Escalado en dominio z :
a n ⋅ x(n ) ↔ X a −1z
2
1
−1
1
∗
∗
2
1
2
1
2
2
∗
∗
1
∗
2
∗
1
∗
2
30
Arquitecturas para el Tratamiento de Señal e Imagen – Análisis en Frecuencia de Señales y Sistemas – J. Gutiérrez Ríos
dX ( z )
dz
x1 (n ) ∗ x2 (n ) ↔ X 1 ( z ) ⋅ X 2 ( z )
nx(n ) ↔ − z
Diferenciación en z :
Convolución :
( )
Correlación : x1 (n ) ∗ x2 (− n ) ↔ X 1 ( z ) ⋅ X 2 z −1
RdC : r2 < z < r1
RdC : Como mínimo RdC1 ∩ RdC 2
RdC : Como mínimo RdC1 ∩ RdC 2
Teorema del valor inicial : Si x(n ) es causal ⇒ x(0 ) = lim X ( z )
z →∞
Teorema del valor final :
⎡⎛ z − 1 ⎞
⎤
X ( z )⎥
Si los polos de X ( z ) están dentro del círculo unidad : lim x(n ) = lim ⎢⎜
⎟
n →∞
z →1
⎣⎝ z ⎠
⎦
Algunos pares útiles de Transforma das z
δ (n ) ↔ 1
RdC : Todo z
δ (n − k ) ↔ z − k
u (n ) ↔
RdC :
z
z −1
− u (− n − 1) ↔
a n u (n ) ↔
si k > 0
z <∞
si k < 0
RdC : z > 1
z
z −1
z
z−a
− a n u (− n − 1) ↔
n ⋅ u (n ) ↔
z >0
RdC : z < 1
RdC : z > a
z
z−a
z
(z − 1)2
RdC : z < a
RdC : z < 1
(sen ω 0 n )u (n ) ↔
z sen ω 0
z − 2 z cos ω 0 + 1
RdC : z < 1
(cos ω 0 n )u (n ) ↔
z 2 − z cos ω 0
z 2 − 2 z cos ω 0 + 1
RdC : z < 1
2
31