Matrices. Grafos - IES Francisco Ayala
Anuncio

Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
Matrices. Grafos (pag. 8). Sistemas de Ecuaciones (pag. 14)
Matrices de números reales. Definiciones
Def.- Consideremos el cuerpo (cuerpo es un conjunto de números donde se puede sumar,
restar, multiplicar y dividir) de los números reales R. Una matriz de números reales de
orden “mxn” (se lee ”m” por “n”) es una tabla de “mxn” números ordenados en “m” filas y
en “n” columnas de la siguiente forma
a11 a12
a 21 a 22
A= ... ...
am1 am2
... a1n
... a 2n ← fila 2
... ...
... amn
↑ Columna 2
Donde los aij son números reales, el subíndice i (el 1º) indica la fila donde está colocado el
número aij, y el subíndice j (el 2º) indica la columna donde está colocado el elemento aij.
Es como si jugáramos al juego de los barquitos, fila i, columna j.
3
−1 4
3 2 es una matriz de orden 3x4. Veamos algunos elementos
2 5
2
** La matriz A= 4
3
1 −1
a23=3 (elemento que está en la fila 2 y la columna 3)
a34=5; a12=2, a32=-1 etc...
Def.- Matriz fila es la que tiene una sola fila
** (1 3 -4 5) esta es de orden 1x4
Def.- Matriz columna es la que tiene una sola columna
− 2
** 3 esta es de orden 3x1
1
Def.- Una matriz escalonada por filas es una matriz tal que en cada fila el número de ceros que precede al primer elemento no nulo es mayor que en la fila anterior.
**
1
0
A=
0
0
4 −1 7
0 5
1
0 0 −2
0 0
0
9
1
es
2
1
una matriz escalonada de orden 4x5
Def.- Una matriz cuadrada es la que tiene igual número de filas que de columnas.
**
1 8
4 6
1 −1
2 − 4
3 − 2
5 0
2 3
0 1
es una matriz cuadrada de orden 4x4. Se suele decir que es de orden 4
** (3) es una matriz cuadrada de orden 1x1.
Def.- Dos matrices A=(aij)mxn y B=(bij)mxn son iguales sii tienen el mismo orden y son iguales los elementos colocados en el mismo sitio, es decir aij=bij.
Def.- La matriz opuesta a la matriz A=(aij) es aquella que se obtiene cambiando de signo
todos los elementos de la matriz A=(aij), y se escribe –A y es - A=(-aij)
2 − 5 − 1
;
0
3 4
** A=
− 2 5 1
− 3 − 4 0
- A=
Def.- Dada una matriz A=(aij)mxn se define su matriz traspuesta que se escribe At como la
matriz At=(aji)nxm , es decir la matriz que se obtiene cambiando sus filas por sus columnas.
Nota.- Si A es de orden mxn su traspuesta At es de orden nxm.
Matrices y Sistemas de Ecuaciones
Página 1
Germán Jesús Rubio Luna
**
2 − 5 − 1
;
A=
0
3 4
Catedrático de Matemáticas
del IES Francico Ayala
2 3
A = − 5 4
−1 0
t
Def.- La matriz nula Omxn es la que tiene todos sus elementos nulos, es decir
0
0
Omxn=
...
0
0 ... 0
0 ... 0
... ... ...
0 ... 0 mxn
Def.- Dada la matriz cuadrada de orden n
a 11 a 12
a
a
A= 21 22
...
...
a
a
n2
n1
... a 1n
... a 2n
,
... ...
... a nn
se llama diagonal principal
a los elementos de la forma aii (unir extremo superior izquierda con extremo inferior derecha). Se llama diagonal secundaria a los elementos de la forma aij con i+j=n+1 (unir extremo superior derecha con extremo inferior izquierda).
Def.- Una matriz cuadrada de orden n decimos que es triangular superior sii todos los
elementos que están por debajo de la diagonal principal son ceros.
1 2 3
** 0 2 1 es triangular superior de orden 3.
0 0 − 2
Def.- Una matriz cuadrada de orden n decimos que es triangular inferior sii todos los elementos que están por encima de la diagonal principal son ceros.
1
0
0 es triangular inferior de orden 3.
3 − 2
0
** − 6 2
1
Def.- Una matriz cuadrada de orden n decimos que es diagonal sii todos los elementos
que no están en la diagonal principal son ceros.
1 0 0
** 0 2 0 es matriz diagonal de orden 3.
0 0 − 2
Def.- Una matriz cuadrada de orden n en la que todos los elementos de la diagonal principal son unos es la matriz identidad ó unidad de orden n, y se escribe In.
**
1 0 ... 0
0 1 ... 0
In=
matriz
... ... ... ...
0 0 ... 1 n
1 0
matriz
0 1
identidad de orden n,
(1) matriz identidad de
orden 1,
1 0 0
identidad de orden 2, 0 1 0 matriz identidad de orden 3.
0 0 1
Def.- Una matriz cuadrada de orden n decimos que es simétrica sii coincide con su traspuesta, es decir A=At.
2
3
2 − 7 es matriz simétrica de orden 3.
3 − 7 − 2
1
** 2
Def.- Una matriz cuadrada de orden n decimos que es antisimétrica ó hemisimétrica sii
coincide con la opuesta de su traspuesta, es decir A= -At.
0
1
0 − 1
0
t
es antisimétrica porque A =
** A=
−
1
0
1
Matrices y Sistemas de Ecuaciones
0 1
,
−1 0
y – At=
es decir A= -At.
Página 2
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
Operaciones con matrices
- Suma
Def.- Dadas dos matrices del mismo orden mxn A=(aij) y B(bij), se define su suma, que se
indica A+B como la matriz de orden mxn que se obtiene al sumar los elementos de A y de
B que se encuentran en el mismo lugar, es decir A+B=(aij + bij).
2 1 3 1 1 − 1 2 + 1 1 + 1 3 − 1 3 2 2
+
=
=
− 2 1 4 2 1 2 − 2 + 2 1+1 4 + 2 0 2 6
**
Propiedades de la suma
Si A, B, C, O son matrices de orden “mxn” siendo O la matriz nula tenemos:
1) Asociativa A+(B+C)=(A+B)+C
2) Conmutativa A+B=B+A
3) Elemento neutro A+O=O+A=A, siendo O la matriz nula
4) Elemento opuesto Dada la matriz A, existe su opuesta –A, tal que A+(-A)=(-A)+A=O
Nota.- También se verifica la siguiente propiedad (A+B)t=At+Bt.
1 2 2 − 3 1 2 1 0
+
+
+
3 4 − 3 4 0 3 0 − 2
** Calcula
- Producto de un número real por una matriz
Def.- Dada la matriz de orden “mxn” A=(aij) y el número real λ, se define el producto del
número λ por la matriz A como una nueva matriz de orden “mxn” que se obtiene multiplicando todos los elementos de la matriz A por el número λ, es decir λ .A=(λ.aij)
1 2
=
− 3 4
** 3 .
3⋅ 2 3 6
3 ⋅1
=
⋅
−
3
(
3
)
3 ⋅ 4 − 9 12
Propiedades del producto de un número por una matriz
Si A y B son matrices de orden “mxn” y λ, µ, y 1 son números reales entonces se verifican
las propiedades:
1) Distributiva respecto a la suma de matrices λ(A+B)= λA+λB
2) Distributiva respecto a la suma de números (escalares) (λ+µ)A=λA+µA
3) Pseudoasociativa o falsa asociativa λ( µ A)= (λµ)A,
4) Elemento unidad Existe el número 1 ∈ ℜ tal que 1.A=A.
Nota.- Otra propiedad es (λ.A)t=λ.At.
1 − 6 0 4 − 1 1 0 3 − 1 2
1 0 0 0 0
** Calcula –2. 8 − 6 2 3 0 - 0 1 6 2 1 +3. 0 1 0 0 0
− 1 1 2 0 0 8 2 1 3 2
0 0 0 0 10
=
** Calcula la matriz A en los siguientes casos
− 1 2
4 1
1 0
a) A=7. 5 2 -6. 3 1 -3. 0 1
− 3 5
4 7
1 0
1 − 5 − 6 6 3 − 1 1 0 0
− 6 0 3
b) A -2. 2 3 1 = 3 3 1 - 5 0 1 0 -2. 1 0 2
4 5
3 4 3 2 0 0 1
− 1 − 1 0
7 − 5 3 1
7 − 6 2 1
1 5 6 − 1
-2.
+6.
c) 14.A=3.
2 − 6 3 1
0 3 1 0
0 1 0 1
- Producto de matrices. Potencias
Nota.- Para poder multiplicar las matrices A y B en el orden A.B el número de columnas
de A tiene que coincidir con el número de filas de B, y la matriz resultante del producto
tiene por orden filas de la 1ª matriz, columnas de la 2ª matriz, es decir Amxn⋅Bnxp=Cmxp.
Def.- Dadas las matrices Amxn=(aij) y Bnxp=(bij), se define su producto A⋅B como la matriz
Cmxp=(cij) con cij=ai1b1j+ ai2b2j+ ai3b3j+......+ ainbnj, es decir para obtener el elemento cij del
Matrices y Sistemas de Ecuaciones
Página 3
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
producto se multiplica término a término los elementos de la fila i de la matriz A por los
elementos de la columna j de la matriz B y se suman.
**
1
3 0 1
. 0 ,
2 1 5 2
como la 1ª es de orden 2x3 y la 2ª de orden 3x1 podemos multiplicarlas y
1
3 0 1 3 x1 + 0 x0 + 1x 2 5
. 0 =
=
2 1 5 2 2 x1 + 1x0 + 5 x 2 12
el producto es de orden 2x1, es decir
2 0 4 −1 2
.
,
1 5 0 3 − 2
**
como la 1ª es de orden 2x2 y la 2ª de orden 2x3 podemos
multiplicarlas y el producto es de orden 2x3, es decir
2 0 4 − 1 2 2 x 4 + 0 x0 2 x(−1) + 0 x3 2 x 2 + 0 x(−2) 8 − 2 4
.
=
=
1 5 0 3 − 2 1x 4 + 5 x0 1x(−1) + 5 x3 1x 2 + 5 x(−2) 4 14 − 8
3
** . (4 − 2) , como la 1ª es de orden 2x1 y la 2ª de orden 1x2 podemos multiplicarlas y el
5
3 x 4 3 x(−2)
3
12
−6
=
producto es de orden 2x2, es decir . (4 − 2) =
5
5 x 4 5 x(−2) 20 − 10
2
** (2 5 − 7 ) . 1 , como la 1ª es de orden 1x3 y la 2ª de orden 3x1 podemos multiplicarlas y
3
2
el producto es de orden 1x1, es decir (2 5 − 7 ) . 1 =( 2x2+5x1+(-7)x3 )=( -12 ) que es un
3
número.
Propiedades del producto de matrices (suponiendo que se pueda multiplicar)
1) Asociativa A⋅(B⋅C)= (A⋅B)⋅C
2) Distributiva A⋅(B+C)= A⋅B+A⋅C y (A+B)⋅C= A⋅C+B⋅C
3) Elemento unidad por la derecha y por la izquierda I⋅A=A y A⋅I’=A
Nota.- I coincide con I’ solamente sí la matriz A es cuadrada. La matriz I es la matriz identidad
4) (A⋅B)t=Bt⋅At
5) No verifica la propiedad conmutativa es decir A⋅B≠B⋅A en general
2
** A= (2 5 − 7 ) y B= 1 . Si hacemos A⋅B nos sale una matriz 1x1, y si hacemos B⋅A nos
3
sale una matriz 3x3 que son distintas.
6) No verifica la propiedad simplificativa es decir de A⋅B=A⋅C no podemos afirmar que
B=C.
1 2
,
2 4
** A=
1 − 1
2 3
B=
3 3
;
1 1
y C=
5 5
;
10 10
A.B =
5 5
10 10
A.C =
y B≠C
Nota.- No se verifican las igualdades (A+B)2=A2+2AB+B2, pues en general AB≠BA. Tampoco se verifica en general (A-B)(A+B)=A2 – B2, por la misma razón de antes.
7) El producto de dos matrices puede ser la matriz nula O sin que lo sean ninguna de las
dos es decir puede ser A⋅B=O con A≠O y B≠O , siendo O la matiz nula. (Se suele decir
que el producto de matrices es singular no regular)
1 − 1
− 2 2
** A=
1 − 1
1 − 1
y B=
Matrices y Sistemas de Ecuaciones
Página 4
Germán Jesús Rubio Luna
Catedrático de Matemáticas
A
5X + 3Y =
con
B
3X + 2Y =
** Resolver el sistema
2 0
−4 15
A=
1 −1
.
2 9
y B=
del IES Francico Ayala
Calcula después X2+Y2.
Def.- En el conjunto de las matrices cuadradas podemos definir las potencias de una matriz de la siguiente forma:
A2=A⋅A
A3=A⋅A⋅A
...........
An=A⋅A⋅⋅⋅⋅⋅(n-veces)⋅⋅⋅A
** Calcula
** Calcula
0
0
2
3
10
A , A , y A con A=
0
0
1
A2, A3, .. An con A=
1
1 1 1
0 1 1
0 0 1
0 0 0
1
.
1
2n −1 2n −1
n −1
2n −1
2
Sale An =
n(n + 1)
1 n
1 1 1
2
2
3
n
n
** Calcula A , A , .. A con A= 0 1 1 . Sale A = 0 1
n
0 0
0 0 1
1
0 3 4
3
** (Selectividad). Comprueba que A + I3 = O3, con A= 1 -4 -5 . Con la igualdad anterior
-1 3 4
calcula A10, A100.
Def.- Una matriz A es ortogonal sii A.At = I.
**
**
0 0 −1
Comprueba que A= 1 0 0 , es ortogonal.
0 1 0
1 1 0
Comprobar si A = 1 -1 1 es ortogonal.
1 0 −1
Propiedades de la trasposición de matrices
a) (At)t=A
b) (A+B)t=At+Bt.
c) (k⋅A)t=k⋅At
d) (A⋅B)t=Bt⋅At
Matriz inversa
Nota.- Las matrices inversas solo existen para las matrices cuadradas.
Def.- Dada una matriz cuadrada A de orden n, si existe otra matriz cuadrada de orden n B
tal que AB=BA=I, siendo I la matriz identidad de orden n se dice que la matriz A es regular
o inversible, y a la matriz B se le llama matriz inversa de A y se escribe A-1. Es decir
AA-1=A-1A =I
Def.- Si una matriz cuadrada no admite inversa, es decir no es regular se dice que es singular.
Teorema.- La matriz inversa de una matriz cuadrada A si existe es única.
Propiedades
1) (A-1)-1 =A
2) (A⋅B)-1 = B-1⋅A-1
3) (At)-1=(A-1)t
Matrices y Sistemas de Ecuaciones
Página 5
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
4).- Una matriz cuadrada A decimos que es ortogonal sii su traspuesta coincide con su
inversa, es decir At = A-1.
Calculo de la matriz inversa por el método de Gauss-Jordan
Nota.- Para calcular la inversa de la matriz A por este método se pone a la derecha de la
matriz A la matriz identidad del mismo orden en la forma (An | In ), y le aplicamos las
transformaciones elementales por filas entre matrices hasta obtener ( In | Bn ). Si lo conseguimos la matriz B es la inversa de la matriz A. Si al hacer este proceso alguna de las filas
de la matriz A se anula, la matriz A no tiene inversa y es una matriz singular.
Nota.-Recuerdo que las transformaciones elementales por filas entre las matrices eran:
(a) Cambiar de orden las filas de la matriz.
(b) Multiplicar una fila de una matriz por un número distinto de cero.
(c) Suprimir una fila que sea combinación lineal de las demás.
(d) Suprimir una fila de ceros.
(e) Sustituir una fila por la suma de ella más otra multiplicada por un número cualquiera
(f) Sustituir una fila por una combinación lineal de ella y de las restantes, siempre que el
coeficiente multiplicador de la fila sustituida sea un número distinto de cero.
−1 2
3 1
** Calcula la matriz inversa de A=
−1
3
1
0
1 −2 −1 0 No toco
2 1 0 1ª ( −1) 1 −2 −1 0 No toco
→
→
→
1 0 1
3 1 0 1 2ª + 1ª(-3) 0 7 3 1 2ª/(7)
−2 −1
0 1ª + 2ª(2)
-1 2
-1 -1/7 2/7
→ , luego la matriz inversa de A=
es A =
.
1 3 / 7 1/ 7 No toco
3 1
3/7 1/7
También se pude calcular utilizando la fórmula A-1 =
1
.Adj(At),
|A|
si se conocen los
determinantes
4 1
1/4 -1/8
** Calcula la matriz inversa de A=
es 0 1/2 , B= 4 2 6 es
2 3 6
0 2
5 2 7
-3 9/2 -1
8
-1 ,
-6
4 -11/2 1
1 0 0
1 0 0
C= 0 1 0 es 0 1 0
0 0 4
0 0 1/ 4
Nota.- También se pude calcular utilizando la fórmula A-1 =
1
.Adj(At),
|A|
si se conocen los
determinantes. Desde hace dos años (2009-2010) los alumnos de la Comunidad
Autónoma Andaluza no tienen necesidad de conocer los determinantes en las
Matemáticas Aplicadas a las Ciencias Sociales II.
Vamos a realizarlo con una matriz de orden 2x2
a b
a b
La matriz A =
= a.d – b.c (producto de los
tiene inversa si su determinarte |A| =
c d
c d
elementos de la diagonal principal menos producto de los elementos de la diagonal
secundaria) es distinto de cero, la matriz inversa es A-1 =
Matrices y Sistemas de Ecuaciones
1
.Adj(A t ) ,
|A|
donde |A| es el
Página 6
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
determinante de A, At es su matriz traspuesta (cambiar filas por columnas) y Adj(At) es la
matriz adjunta de la traspuesta.
En el caso de una matriz cuadrada de orden 2x2 indico las diferentes matrices.
a b
a c
d
-b
1
1 d
-b
t
t
-1
t
A=
.
; A =
; y la inversa es A = .Adj(A ) =
; Adj(A ) =
|A|
|A| -c a
c d
-c a
b d
4 1
** Inversa de A=
.
0 2
Como |A| = 4.2 – 1.0 = 8 ≠ 0, existe su matriz inversa que es A-1 =
1
.Adj(A t ) .
|A|
4 1 t 4 0
2 -1 2 -1
t
A=
; A =
; Adj(A ) =
=
y la inversa es
0 2
1 2
-0 4 0 4
A-1 =
12
1
.Adj(A t ) =
|A|
8 0
-1 1/4 -1/8
=
.
4 0 1/2
Matrices y Sistemas de Ecuaciones
Página 7
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
GRAFOS- (Notas de D. Manuel Froufe Quintas, Catedrático del IES Fco. Ayala)
Def.- Un grafo es un conjunto, no vacío, de objetos llamados vértices (o nodos) y una
línea de unión entre pares de vértices, llamadas aristas . Típicamente, un grafo se
representa mediante una serie de puntos (los vértices) conectados por líneas (las aristas).
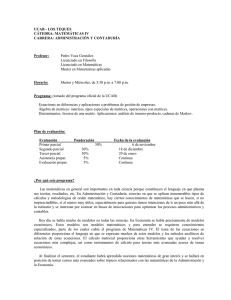
En la figura, el conjunto de vértices es V = { a, b, c, d, e, f }, y el
conjunto de aristas es A = { ab, ac, af, bc, cd, de, ef }.
Matriz de adyacencia - El grafo está representado por una matriz cuadrada M de tamaño
n2, donde n es el número de vértices. Si hay una arista entre un vértice a y un vértice b,
entonces el elemento mab es 1, de lo contrario, es 0.
Un grafo es conexo si cada par de vértices está conectado por un camino; es decir, si
para cualquier par de vértices (a, b), existe al menos un camino posible desde a hacia b.
Un grafo es simple si hay sólo 1 arista que une dos vértices cualesquiera. Nosotros sólo
utilizaremos los grafos simples.
Aristas dirigidas y no dirigidas
En algunos casos es necesario asignar un sentido a las aristas, por ejemplo, si se quiere
representar la red de las calles de una ciudad con sus direcciones únicas. A estos se le
llama digrafos.
Las aristas no orientadas se consideran bidireccionales para efectos prácticos (equivale a
decir que existen dos aristas orientadas entre los nodos, cada una en un sentido). La
matriz de adyacencia de grafos simples con aristas no orientadas siempre es simétrica.
Grafos ponderados o etiquetados
En muchos casos, es preciso atribuir a cada arista un número específico, llamado
valuación, ponderación o coste según el contexto, y se obtiene así un grafo valuado.
Por ejemplo, un representante comercial tiene que visitar n ciudades conectadas entre sí
por carreteras; su interés previsible será minimizar la distancia recorrida (o el tiempo, si se
pueden prever atascos). El grafo correspondiente tendrá como vértices las ciudades,
como aristas las carreteras y la valuación será la distancia entre ellas.
Nota.- En los grafos interesa recorrer las aristas para llegar de un vértice a otro. Se llama
camino o ruta entre dos vértices, a y b, a toda sucesión de aristas que conectan a con b,
siendo la longitud del camino el número de aristas que lo componen.
Nota.- Las potencias de la matriz de adyacencia de un grafo permiten conocer el número
de caminos existentes entre cualquier par de vértices de una determinada longitud.
La matriz de adyacencia M de un grafo indica si existe o no una arista entre cada par de
vértices.
La matriz M2 indica el número de caminos de longitud 2 entre dos vértices cualesquiera.
De la misma forma, la matriz M3 indica el número de caminos de longitud 3 y así
sucesivamente.
También se puede establecer si existe o no un camino, no importa la longitud, entre dos
vértices cualesquiera con la matriz B = M + M2 + M3 + … + Mn-1 . ( n el número de
vértices)
Nota.- En Andalucía sólo entran grafos no dirigidos.
Matrices y Sistemas de Ecuaciones
Página 8
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
1.- Sean los grafos siguientes:
a) Escriba la matriz de adyacencia asociada a los grafos A y B de la figura anterior.
0
1
B = 0
0
0
1 0 1 0
0 1 0 1
1 0 0 0
0 0 0 1
1 0 1 0
0
1
A = 0
1
0
Sol:
1 0 0 0
0 1 0 0
1 0 0 0
0 0 0 1
0 0 1 0
b) Si las matrices C y D unen los nodos numerados con las etiquetas 1, 2, 3, represente
los grafos asociados a dichas matrices de adyacencia.
0 1 0
0 1 1
C = 1 0 1
D = 1 0 1
Sol:C→
D→
0 1 0
1 1 0
c) Realice la siguiente operación matricial: D ⋅ C − C ⋅ D
1 1 1
1 0 1
0
1
0
1 1 1
1 0 1
0
1
0
Sol: DC − CD = 0 2 0 − 1 2 1 = − 1 0 − 1
2.- Hallar cuántos caminos de longitud 2 y
3 conectan cada par de vértices del grafo
siguiente:
a b c d
Sol:
a 0
b 1
M=
c 1
d 1
1
0
1
1
1
1
0
1
1
1
1
0
a b c d
a 3
b 2
2
M =
c 2
d 2
2
3
2
2
2
2
3
2
2
2
2
3
a b c d
a 6
b 7
3
M =
c 7
d 7
7
6
7
7
7
7
6
7
7
7
7
6
En M2 de observa que hay, por ejemplo, dos caminos de longitud 2 que comunican c con
b. Del grafo se deducen que son: c-a-b y c-d-b.
En M3 de observa que hay, por ejemplo, siete caminos de longitud 7 que comunican c con
b. En el grafo podemos ver que alguno de ellos son: c-d-a-b, c-a-d-b, c-d-c-b, …
3.- Entre los cuatros pueblos A, B, C y D se establece una
línea de autobuses tal como viene representada en el
siguiente grafo:
a) Escribe su matriz de adyacencia R.
b) Da un significado a las matrices R2 y R3.
Matrices y Sistemas de Ecuaciones
Página 9
Germán Jesús Rubio Luna
A B C
Sol: a)
•
•
A0
B 1
R=
C 0
D 0
1
0
0
1
0
1
0
1
Catedrático de Matemáticas
A B C
D
0
0 b)
1
0
A 1
B 0
2
R =
C 0
D 1
0
1
1
0
del IES Francico Ayala
D
1
0
1
1
0
1
0
1
A B C
A0
B 1
3
R =
C 1
D 0
1
1
0
2
D
0
2
1
1
1
0
1
1
R2 indica los caminos, de longitud 2, que hay para ir de un punto a otro. Por ejemplo
hay un camino de longitud 2 entre A y C: A → B → C; otro entre D y C: D → B → C;
otro entre A y A: A → B → A. No hay ninguno entre A y B, ni entre C y D.
R3 indica los caminos, de longitud 3, que hay para ir de un punto a otro. Por ejemplo
hay un camino (donde hay un 1) de longitud 3 entre A y D: A → B → C → D ; otro entre
D y C: D → C → D → C; hay 2 entre B y C: B → A →B → C y B → C → D → C .
No hay ninguno (donde hay un 0) entre A y C, ni entre C y B.
4.- A, B, C y D son cuatro plazas de una ciudad. El grafo siguiente indica cómo están
comunicadas entre sí. Escriba la matriz de adyacencia M asociada al grafo:
Da un significado para las matrices M2, M2 + M , M3 y M3 + M2 + M
Sol:,
A B C
A 0
B 1
M =
C 0
D 1
D
1
0
1
0
3 3
3 1
3
2
M +M +M =
1 1
3 1
1
0
0
0
2
0
2
M =
1
0
1
0
0
0
3
1
1
1
0
1
0
1
0
1
0
1
1
1
0
1
2
1
2
M +M =
1
1
1
1
0
1
1
1
0
1
2
1
1
1
1
2
3
M =
0
2
2
0
1
0
2
0
1
0
2
1
1
1
4
2
2
2
La matriz M2 indica las rutas, de longitud 2 (pasando por una plaza intermedia), que hay
para ir de una plaza a otra.
La matriz M2 + M indica el número de rutas para ir de una plaza a otra directamente o
pasando por otra plaza intermedia.
La matriz M3 indica las rutas, de longitud 3 (pasando por dos plazas intermedias), que
hay para ir de una plaza a otra.
5.- Del grafo adjunto obtener M, M2 y M3 y luego calcular
B = M + M2 + M3 .
Deducir de B que no existen caminos entre a y c, ni entre a y d.
Además, que b no está conectada con ningún vértice, y c no lo
está con d, y sin embargo d está conectado con todos los demás.
Sol:
a b c d
a 0
b 0
B=M +M2 +M3 =
c 1
d 1
1 0 0
0 0 0
2 0 0
2 1 0
Matrices y Sistemas de Ecuaciones
No existen caminos entre a y c, ni entre a y d ya que los
elementos bac = 0 y b ad = 0 .
B no está conectada con ningún vértice ya que toda su
fila son 0.
Página 10
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
6.- Un sociólogo ha obtenido, al estudiar laas relaciones de
dominio en un grupo de seis personas, el digrafo de la figura.
Determina quién tiene control directo o indirecto sobre quién.
Sol:
La matriz de adyacencia D, es la matriz de dominancia directa, D2 es la matriz de
dominancia indirecta de segundo orden, D3 dominancia indirecta de tercer orden, y así
sucesivamente.
0
0
D = 0
1
0
0 1 0 0
0 0 1 1
0 0 0 0
0 1 0 0
0 1 0 0
0
1
D2 = 0
0
0
0 0 0 0
0 2 0 0
0 0 0 0
0 1 0 0
0 0 0 0
0
0
D3 = 0
0
0
0 0 0 0
0 1 0 0
0 0 0 0
0 0 0 0
0 0 0 0
Si nos fijamos en b tiene control directo (valor 1) en D sobre d y e, e indirecto de segundo
orden sobre c (valor 2) en D2, e indirecto de tercer orden sobre c (valor 1) en D3.
7.- En un instituto I hay alumnos de tres pueblos, A, B y C.
La distancia entre A y B es 6 km, la de B a C es 7 km, la de
A a C es 10 km y la de A a I es 8 km. Una empresa de
transporte escolar hace dos rutas: la ruta 1 parte de B y
recorre sucesivamente C, A e I; la ruta 2 parte de C y
recorre sucesivamente B, A e I.
(Los datos están en el grafo valuado adjunto)
a) Determine la matriz M, 2x3, que expresa los kilómetros que recorren los alumnos de
cada pueblo por cada ruta.
M =
Ruta1
Ruta 2
A B C
8 25 18
8 14 21
b) El número de alumnos que siguen cada ruta de cada pueblo es:
Pueblo A: 10 alumnos la ruta 1 y 9 alumnos la ruta 2.
Pueblo B: 15 alumnos la ruta 1 y 8 alumnos la ruta 2.
Pueblo C: 5 alumnos la ruta 1 y 9 alumnos la ruta 2.
Determine la matriz N, 3x2, que indique los alumnos que siguen cada ruta de cada
pueblo.
AlumnosA
N = AlumnosB
AlumnosC
Ruta1 Ruta 2
9
10
8
15
5
9
c) Si la empresa cobra 12 céntimos por Km a cada persona, determine la matriz P = 0.12
M∙ N, e interprete cada uno de sus elementos.
545 434 65,4 52,08
P = 0.12 M∙ N = 0,12
=
395 373 47,4 44,73
p11 = 65,40
p22 = 44,73
p12 = 52,08
p21 = 47,40
lo que cobra la empresa por la R
1
lo que cobra la empresa por la R
2
no tiene sentido.
no tiene sentido
p12 = 52,08 sería lo que cobraría la empresa si los alumnos de la R fuera por la R
2
1
p21 = 47,40 sería lo que cobraría la empresa si los alumnos de la R fuera por la R
1
2
Matrices y Sistemas de Ecuaciones
Página 11
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
8.- En una empresa de fabricación de móviles hay 3 categorías de empleados: A, B y C y
se fabrican dos tipos de móviles: M y P. Diariamente cada empleado de la categoría A
fabrica 4 móviles del tipo M y 3 del tipo P, mientras que cada uno de la categoría B fabrica
5 móviles del tipo M y 4 del tipo P, y cada uno de la categoría C fabrica 6 móviles del tipo
M y 5 móviles del tipo P. Para fabricar cada móvil del tipo M se necesitan dos chips y 4
conexiones y para fabricar cada móvil del tipo P 4 chips y 6 conexiones.
a) Escriba una matriz X, 3x2, que describa el número de móviles de cada tipo y otra
matriz Y, de orden 2, que exprese el número de chips y conexiones de cada tipo de móvil.
Sol: A : 4M 3P B: 5M 4P C: 6 M 5P
y M : 2 CH 4 CO
P: 4 CH
6 CO
A
X = B
C
M
4
5
6
P
3
4
5
CH CO
Y=
M 2 4
P 4 6
b) Realice el producto de matrices X∙Y e indique qué expresa dicho producto.
CH CO
4 = A 20 34
4 6
B 26 44
6 5
C 32 54
4 3
X · Y = 5 4 2
El producto expresa el número de chips y de conexiones totales que hace cada empleado.
9.- Un proveedor que suministra materia prima a 3 fábricas, F, G y H, transporta una parte
de sus envíos a cada fábrica por carretera y la otra parte por tren, según se indica en la
matriz T, cuyos elementos son las toneladas de materia prima que recibe cada fábrica por
cada vía de transporte.
F
G
H
300 200 150 carretera
T =
400 250 200 tren
Los precios del transporte de cada tonelada de materia prima son 200 euros por carretera
y 180 euros por tren, como indica la matriz C = (200, 180).
Explique qué operación debe efectuarse con estas matrices para determinar una nueva
matriz cuyos elementos sean los costes de llevar este material a la fábrica.
Sol: Debe efectuarse C · T ( El producto T · C no podría realizarse)
300 200 150
C · T = (200 180 )
6600 ) = ( Coste F Coste G Coste H )
= (132000 85000
400 250 200
10.- Una persona tiene que comprar 2 kg de manzanas, 1 kg de ciruelas y 1.5 kg de
plátanos y otra necesita 0.5 kg de manzanas, 2.5 de ciruelas y 3 de plátanos. En la
frutería A, los precios de las manzanas son 1.8 euros/kg, los de las ciruelas 2.1 y los de
los plátanos 1.9 y en la frutería B son 1.7, 2.3 y 1.75 respectivamente.
Se escriben las matrices
1.8 1.7
1 1.5
2
M =
y N = 2.1 2.3
0.5 2.5 3
1.9 1.75
Matrices y Sistemas de Ecuaciones
Página 12
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
a) Determine M∙N e indique qué representa cada uno de los elementos de la matriz
producto.
A
B
1 1.5 1.8 1.7
2
2.1 2.3 = Una 8.55 8.325
M · N =
0.5 2.5 3
1.9 1.75
Otra 11.85 11.85
Coste de cada una en cada tienda
b) ¿En qué frutería le conviene a cada persona hacer la compra?
La una debe comprar en la frutería A y a la otra le da igual comprar en A que en B..
11.- Un fabricante de productos lácteos, que vende 3 tipos de productos, leche, queso y
nata, a dos supermercados, S y H, ha anotado en la matriz A los pesos en kg de cada
producto que vende a cada supermercado y , en la matriz B, las ganancias que obtiene en
cada supermercado por cada kg de esos productos
leche queso nata
leche queso nata
4
1 S
matriz B : 0.20
Matriz A: 500 300 250 S
0
.
25
3
.
60
1
.
20
460
300
200
H
H
t
Efectúe el producto A ⋅ B y explique el significado económico de cada uno de los
elementos de la diagonal principal de la matriz resultante.
S
leche 0.20
A · Bt = 500 300 250 S
queso 4
460 300 200 H Nata 51
leche queso nata
H
S
M
0.25
= S 1550 1505
3.60
M 1492 1435
1.20
Los elementos de la
diagonal principal representa las ganancias totales del fabricante en cada supermercado.
12.- Cierta fábrica de colonias posee tres marcas X, Y, Z, distribuyendo su producción en
cuatro tiendas. Los litros almacenados en la primera tienda vienen dados por la siguiente
matriz:
X
Y
Z
Agua de colonia 22 46 80
Perfume
2 1,5 3 = A
0,6 0,2 0,1
Esencia
La segunda tienda almacena el doble que la primera, la tercera la mitad y la cuarta el
triple ¿Qué volumen de producción se tiene almacenada en total?
Sol:
Los litros almacenados, según la marca y el tipo de colonia, en cada tienda vienen
dados por las matrices A, 2 A, 0,5 A y 3 A respectivamente, por lo que el total de litros
almacenados será:
X
Y
Z
22 46 80
Agua de colonia 143 299 520
A + 2 A + 0,5 A + 3 A = 6,5 A = 6,5 2 1,5 3 =
Perfume
13
9,75
19,5
0,6 0,2 0,1
Esencia
3,9 1,3 0,65
Sumando por fila, obtendríamos el total de litros de cada tipo de colonia, y por
columnas, el total según la marca.
Matrices y Sistemas de Ecuaciones
Página 13
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
Sistemas de ecuaciones lineales
Def.- Se llama sistema lineal de “m” ecuaciones con “n” incógnitas a toda expresión del
tipo
a11x 1 + a12 x 2 + .....a 1n x n = b1
a 21x 1 + a 22 x 2 + .....a 2n x n = b 2
(I) ..........
...................................
a x + a x + .....a x = b
m2 2
mn n
m
m1 1
en donde x1, x2, ...., xn son las incógnitas, los números reales aij con 11 ≤≤ ij ≤≤ m
son los coefin
cientes de las incógnitas y los números bi con 1 ≤ i ≤ m son los términos independientes.
Nota.- La matriz asociada al sistema
a11x 1 + a12 x 2 + .....a 1n x n = b1
a 21x 1 + a 22 x 2 + .....a 2n x n = b 2
(I) ..........
...................................
a x + a x + .....a x = b
m2 2
mn n
m
m1 1
es
a11 a12
a 21 a 22
..... .....
a
m1 a m2
... a1n b1
... a 2n b 2
... ..... ...
... a mn b m
Def.- Una solución del sistema lineal de m ecuaciones con n incógnitas (I), es una n-tupla
(n números ordenados) (α1, α2, .........., αn) que al sustituirla respectivamente por x1, x2, ....,
xn, hacen ciertas todas las ecuaciones del sistema lineal (I), es decir verifica
a 11α 1 + a 12α 2 + .....a 1nα n = b 1
a 21α 1 + a 22α 2 + .....a 2nα n = b 2
.......... .......... .......... .......... .....
a α + a α + .....a α = b
m2 2
mn n
m
m1 1
Def.- Resolver un sistema es averiguar si tiene o no soluciones, y en caso afirmativo determinarlas todas.
Def.- Un sistema se dice que es compatible sii admite al menos una solución, por el contrario se dice que es incompatible si no admite ninguna solución. Un sistema compatible
(tiene solución) se dice que es determinado sii tiene solución única, y un sistema compatible se dice que es indeterminado sii admite infinitas soluciones ( dependen de un número
o de varios números llamados parámetros).
Def.- Un sistema lineal de m ecuaciones con n incógnitas decimos que es homogéneo sii
todos los términos independientes son cero, es decir es una expresión del tipo
a11x 1 + a12 x 2 + .....a 1n x n = 0
a 21x 1 + a 22 x 2 + .....a 2n x n = 0
.............................................
a x + a x + .....a x = 0
m2 2
mn n
m1 1
Nota.-Cualquier sistema homogéneo es siempre compatible, pues por lo menos tiene
n veces
siempre la solución trivial (0,0,0.........,0) .
Matrices y Sistemas de Ecuaciones
Página 14
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
a11x 1 + a12 x 2 + .....a 1n x n = b1
a 21x 1 + a 22 x 2 + .....a 2n x n = b 2 ,
Def.- En el sistema lineal de m ecuaciones con n incógnitas ..........
...................................
a x + a x + .....a x = b
m2 2
mn n
m
m1 1
llamaremos diagonal principal del sistema a la línea que une los coeficientes que tienen
los subíndices iguales a11, a22,...., aii, etc.
Análogamente se llama diagonal principal de la matriz asociada al sistema
a11 a12
a 21 a 22
..... .....
a
m1 a m2
... a1n
... a 2n
... .....
... a mn
b1
b2
,
...
b m
a la línea que une los términos a11, a22,...., aii, etc.
+z = 0
x −y
** Matriz asociada al sistema 2x − 3y + 4z = 6
x −y
+z = 1
** Sistema correspondiente a la matriz
1 −1
−1 0
1 4
0 5
1 2
3 1
2 3
1 2
Sistemas equivalentes
Def.- Dos sistemas de ecuaciones lineales con el mismo número de incógnitas, aunque
tengan distinto número de ecuaciones, se dice que son equivalentes sii tienen las mismas
soluciones, es decir cada solución de uno lo es del otro y recíprocamente
x - y = -3
** El sistema 2x + y = 6
4x - 4y = -12
x - y = -3 , porque tienen la misma
es equivalente al sistema 2x
+y=6
solución (x,y)=(1,4) (comprobarlo).
Teorema.- Dado un sistema lineal, las siguientes transformaciones realizadas en él dan
lugar a otro sistema lineal equivalente a él (es decir tiene las mismas soluciones):
(a) Cambiar de orden las ecuaciones del sistema.
(b) Multiplicar los dos miembros de una ecuación por un número distinto de cero.
(c) Suprimir una ecuación del sistema que sea combinación lineal de las demás ( que se
obtenga a partir de las demás multiplicándolas por ciertos números y sumándolas),
(d) Sustituir una ecuación por la suma de ella más otra ecuación multiplicada por un número cualquiera.
(e) Sustituir una ecuación del sistema por una combinación lineal de ella y de las restantes siempre que el coeficiente de la ecuación sustituida sea distinto de cero.
Consecuencia.- Cada una de las transformaciones anteriores que dan lugar a sistema lineales equivalentes, determina una transformación en la matriz asociada al sistema lineal.
Matrices y Sistemas de Ecuaciones
Página 15
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
Las transformaciones que podemos utilizar en las matrices asociadas para dar lugar a
sistemas equivalentes son las siguientes:
(a) Cambiar de orden las filas de la matriz.
(b) Multiplicar una fila de una matriz por un número distinto de cero.
(c) Suprimir una fila que sea combinación lineal de las demás.
(d) Suprimir una fila de ceros.
(e) Sustituir una fila por la suma de ella mas otra multiplicada por un número cualquiera
(f) Sustituir una fila por una combinación lineal de ella y de las restantes, siempre que el
coeficiente multiplicador de la fila sustituida sea un número distinto de cero.
Nota.- Estas transformaciones entre las matrices son muy importantes, pues las utilizaremos para resolver sistemas de ecuaciones, calcular el rango de un conjunto de vectores,
el rango de una matriz. Calcular determinantes etc..
Resolución de sistemas. Método de Gauss (Gauss-Jordan)
Nota.- Recuerdo que resolver un sistema es determinar si tiene o no solución y en caso
afirmativo determinar todas las soluciones.
Def.- Un sistema lineal de ecuaciones se dice que es escalonado si el primer elemento no
nulo de cada fila, llamado cabecera de la fila está mas a la derecha del primer elemento
no nulo de la fila anterior.
Def.- Análogamente un sistema es triangulado (n=m) si todos los coeficientes que hay por
debajo de la diagonal principal (línea que une los términos a11, a22,...., aii, ) son cero, es
decir cada una de las ecuaciones tiene una incógnita menos que la anterior, por tanto
tiene la forma:
a11x1 + a12x2 + a13x3 + a14x4 = b1
a22x2 + a23x3 + a24x4 = b2
a33x3 + a34x4 = b3
Nota.- En la practica en vez de utilizar las incógnitas x1, x2, x3, .. xn, utilizaremos las usuales x, y, z, t etc..
Nota.- La resolución de un sistema escalonado es tremendamente sencilla. De la última
ecuación despejamos la incógnita que haya, con ese valor de esa incógnita entramos en
la ecuación anterior y obtenemos el valor de la siguiente incógnita. Con los dos valores de
las dos incógnita que ya tenemos entramos en la otra ecuación y obtenemos el valor de
otra incógnita. Seguimos así hasta que terminemos. Veámoslo con un ejemplo:
** Resolver el sistema
Matrices y Sistemas de Ecuaciones
Página 16
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
x+2y+3z+ t=1
4y-5z+6t=2
2z+6t=5
2t=6
De la última ecuación tenemos 2t=6, de donde t=6/2=3. Entramos con este valor de t en la
ecuación anterior y tenemos 2z+6.(3)=5, operando y despejando resulta z=(- 13)/2.
Con t=3, y z=-13/2 entramos en
4y-5z+6t=2, y tenemos 4y-5(-13/2)+6(3)=2. Operando y despejando
obtenemos y= -97/8.
Con t=3, z= -13/2, y= -97/8 entramos en x+2y+3z+ t=1 y tenemos x+2( -97/8) +3( -13/2)
+(3)=1. Operando y despejando obtenemos x=163/4.
La solución del sistema es (x,y,z,t)=(163/4, -97/8, -13/2,3)
Def.- El método de Gauss para resolver sistemas de ecuaciones lineales consiste en
transformar el sistema dado por otro equivalente que sea escalonado, utilizando para ello
las transformaciones que dan lugar a sistemas equivalentes.
Nota.- En la `práctica para conseguir un sistema escalonado buscaremos una ecuación
que tenga como coeficiente de la “x” un 1 o un –1, sino lo fabricamos. Cuando se tenga se
pueden hacer cero todas la “x” de las restantes ecuaciones que se encuentren debajo de
la primera. Una vez hecho esto dejamos esta 1ª ecuación quieta y con las restantes buscamos otra que tenga como coeficiente de “y” un 1 o un –1, sino lo fabricamos. Una vez
que lo tengamos podemos hacer cero todas la “y” que se encuentran debajo de la 2ª
ecuación. Se sigue este proceso hasta que se termine.
En realidad todo esto se hace con la matriz asociada al sistema.
Resumiendo.- Al aplicar el sistema de Gauss para resolver sistemas de ecuaciones lineales nos puede quedar en el sistema escalonado lo siguiente:
(a) Tantas ecuaciones válidas como incógnitas. En este caso el sistema tiene solución
única y es un sistema compatible y determinado..
(b) Mas incógnitas que ecuaciones. En la última ecuación se pasan las incógnitas sobrantes al 2º miembro, cada una de estas incógnitas sobrantes se les dará un valor de un
parámetro. En este caso el sistema tiene infinitas soluciones y depende de los parámetros
(incógnitas que hemos pasado al 2º miembro) se dice que el sistema es un sistema
compatible e indeterminado..
(c) Puede aparecernos una ecuación de la forma 0.xi=k≠0, lo cual es un absurdo, en este
caso el sistema no tiene solución y se dice que es un sistema incompatible.
Veámoslo con ejemplos:
Matrices y Sistemas de Ecuaciones
Página 17
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
x − y − 2z = − 1
** Resolver el sistema 2x − 3y + 4z = 4 . Pasamos a la matriz asociada
5x − y + 3z = 16
Matriz asociada
1 − 1 − 2 − 1 No se toca
2 − 3 4 4 2 a + 1a ⋅ ( −2) →
a
a
5 − 1 3 16 3 + 1 ⋅ ( −5)
1 − 1 − 2 − 1 No se toca
0 − 1 8 6 No se toca →
a
a
0 4 13 21 3 + 2 ⋅ ( 4)
1 − 1 − 2 − 1
0 − 1 8 6
0 0 45 45
Es decir la fila que se multiplica no se toca
Ya tenemos la matriz escalonada, pasamos al sistema escalonado equivalente
x − y − 2z = − 1
− y + 8z = 6 , de donde de la ultima ecuación z=1, entramos en la anterior y obtene
45z = 45
mos -y+8(1)=6, de donde y=2. Con z=1 e y=2 entramos en x-y-2z=-1, obtenemos x-2-2=1 de donde x=3, y la solución del sistema es (x,y,z)=(3,2,1).
Como la solución es única es un sistema compatible y determinado.
** Resolver el sistema
Matriz asociada
x − 2y + z = 3
- x + y - 2z = 1
2x − 3y + z = 2
. Pasamos a la matriz asociada
1 − 2 1 3 No se toca
- 1 1 - 2 1 2 a + 1a ⋅ (1) →
a
a
2 − 3 1 2 3 + 1 ⋅ ( −2)
1 − 2 1 3 No se toca
0 − 1 - 1 4 No se toca →
a
a
0 1 - 1 - 4 3 + 2 ⋅ (1)
1 − 2 1 3
0 − 1 - 1 4
0 0 - 2 0
Ya tenemos la matriz escalonada, pasamos al sistema escalonado equivalente
x − 2 y + z = 3
− y - z = 4 , de donde resolviéndolo obtenemos z=0, y=-4 y x=-5.
- 2z = 0
La solución del sistema es (x,y,z)=(-5,-4,0), como la solución es única, tenemos un sistema compatible y determinado .
** Resolver el sistema
x − y + 3z = 4
-z = 6
2x − y
3x − 2 y + 2z = 10
1 − 1 3 4 No se toca
→ 0 1 - 7 - 2 No se toca →
a
a
0 1 - 7 - 2 3 + 2 ⋅ (-1)
1 −1 3 4
0 1 - 7 - 2 .
0 0 0 0
. Matriz asociada
1 − 1 3 4 No se toca
2 - 1 - 1 6 2 a + 1a ⋅ (-2) →
a a
3 − 2 2 10 3 + 1 ⋅ ( −3)
Como la tercera fila es de ceros desaparece y
3z = 4 . Como tenemos dos ecuaciones solo hay dos incógniel sistema asociado es x - yy -+7z
= -2
tas principales la “x” y la “y”, la “z” la pasamos al otro miembro y le damos el valor de un
parámetro, es decir hacemos z=λ, con lo cual nos queda y= - 2+7λ, y entrando en la 1ª
ecuación y operando obtenemos x=2+4λ. Por tanto la solución del sistema es
(x,y,z)=(2+4λ,- 2+7λ,λ) con λ∈ℜ (λ número real).
Matrices y Sistemas de Ecuaciones
Página 18
Germán Jesús Rubio Luna
Catedrático de Matemáticas
del IES Francico Ayala
Es un sistema que tiene infinitas soluciones que dependen del parámetro λ, y es un sistema compatible e indeterminado (depende de un parámetro).
-z+t = 6
** Resolver el sistema -xx++y3y
. Matriz asociada
- 2z + 2t = -1
1 1 −1 1 6
.
→
0 4 − 3 3 5
1 1 − 1 1 6 No se toca
− 1 3 − 2 2 − 1 2ª +1ª⋅(1) →
Sistema asociado x +4yy- -3zz++3tt == 56 .
Como tenemos dos ecuaciones solo hay dos incógnitas principales la “x” y la “y”, la “z” y la
“t” las pasamos al otro miembro y le damos valores de parámetros, es decir hacemos z=λ
y t=µ, con lo cual entrando en la 2ª ecuación y operando obtenemos y=
5 + 3λ − 3µ
4
. Si ahora
entramos con los valores de t, z e y en la 1ª ecuación y despejamos la “x” obtenemos
x=
19 + λ − µ
4
(x,y,z,t)=(
, por tanto las soluciones del sistema son
19 + λ − µ 5 + 3λ − 3µ
,
4
4
, λ, µ) con λ, µ ∈ ℜ (λ y µ números reales). Es decir las
soluciones dependen de dos parámetros y tiene infinitas soluciones. Es un sistema
compatible e indeterminado (doblemente, porque depende de dos parámetros)
** Resolver el sistema
2x - y + 3z = 6
4x - 2y + 6z = 9 .
x - y + z = 3
1 − 1 1 3 No se toca
4 - 2 6 9 2ª +1ª⋅(-4) →
2 − 1 3 6 3ª +1ª⋅(-2)
1 −1 1 3
Cambio
0 2 2 - 3 2ª por 3ª →
0 1 1 - 2
x - y + z = 3
y + z = -2 .
0 =1
asociado
Matriz asociada
2 −1 3 6
Cambio 1ª
→
4 - 2 6 9 por 3ª
1 −1 1 3
1 − 1 1 3 No toco
0 1 1 - 2 No toco →
0 2 2 - 3 3ª +2ª⋅(-2)
1 −1 1 3
0 1 1 - 2 .
0 0 0 1
Sistema
Como vemos la última ecuación es absurda, por tanto el sistema no
tiene solución y es un sistema incompatible.
x − 3y + 2z = 0 . Como es un sistema homogéneo siempre tiene la
** Resolver el sistema 2x
− 5y + z = 0
solución trivial
(x,y,z)=(0,0,0). Pero no es esta la que buscamos
1 − 3 2 0
→
Matriz asociada
2 − 5 1 0
1 − 3 2 0
0 1 − 3 0 .
+ 2z = 0 . Dándole el
Sistema asociado x − 3y
y - 3z = 0
valor z=λ, obtenemos entrando en la 2ª ecuación y=3λ, y entrando en la 1ª ecuación
x=7λ. Por tanto la solución del sistema es (x,y,z)=(7λ, 3λ, λ) con λ ∈ ℜ (λ número real).
Tiene infinitas soluciones que dependen de un parámetro y es un sistema compatible e
indeterminado.
Matrices y Sistemas de Ecuaciones
Página 19