Cómo verificar las propiedades
Anuncio

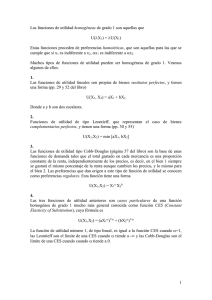
3.1. Demostración de propiedades en sistemas no recursivos 3.1. 3 Demostración de las propiedades de linealidad, causalidad, estabilidad, invariación temporal para sistemas no recursivos La demostración de las propiedades de sistemas no recursivos es realtivamente sencilla. En este ejemplo se estudia un sistema variante en el tiempo. E JEMPLO 3.1. Demostración de propiedades de un sistema no recursivo Se desea conocer si el sistema caracterizado por la ecuación a diferencias no recursiva y[n] = x [n] + cos(2πn/10) x [n 1]. es lineal, invariante en el tiempo, causal y estable. 1. Linealidad: Si y1 [n], y2 [n] son las salidas del sistema ante entradas x1 [n], x2 [n], es decir y1 [ n ] = x1 [n] + cos(2πn/10) x1 [n y2 [n] = x2 [n] + cos(2πn/10) x2 [n 1], 1], la salida del sistema ante una entrada x3 [n] = ax1 [n] + bx2 [n] (una combinación lineal de x1 [n] y x2 [n]) es y3 [ n ] = = = = = x3 [n] + cos(2πn/10) x3 [n 1] ( ax1 [n] + bx2 [n]) + cos(2πn/10) ( ax1 [n 1] + bx2 [n 1]) ax1 [n] + a cos(2πn/10) x1 [n 1] + bx2 [n] + b cos(2πn/10) x2 [n 1] a ( x1 [n] + cos(2πn/10) x1 [n 1]) + b ( x2 [n] + cos(2πn/10) x2 [n 1]) ay1 [n] + by2 [n], por lo tanto el sistema es lineal. 2. Invariación temporal: Si y[n] es la salida del sistema ante una entrada x [n], la salida y1 [n] ante una entrada x1 [n] = x [n n0 ] es y1 [ n ] = x1 [n] + cos(2πn/10) x1 [n 1] = x [n n0 ] + cos(2πn/10) x [n n0 1], (3.1) mientras que la salida y[n] demorada n0 muestras es y[n n0 ] = x [n = x [n n0 ] + cos[2π (n n0 ] + cos[2πn/10 n0 )/10] x [n n0 2πn0 /10)] x [n 1] n0 1]. (3.2) Es evidente que (3.1) es distinta de (3.2) (salvo en el caso particular que n0 sea múltiplo de 10); esto es, en el caso general, y[n n0 ] 6= y1 [n]. Por lo tanto el sistema no es invariante en el tiempo. (Se podía sospechar este resultado porque uno de los coe…cientes del sistema es función del número de muestra n.) 3. Causalidad: El sistema es causal porque sólo depende de entradas pasadas. Esto es, dos entradas x1 [n] y x2 [n], que son iguales hasta un índice n0 , producirán salidas y1 [n], y2 [n] que son idénticas al menos hasta n0. 4. Estabilidad entrada/salida: Para probar que el sistema es estable entrada/salida, se supone que la entrada x [n] está acotada para todo n; por ejemplo, j x [n]j Bx . Entonces se puede encontrar una cota para y[n]: jy[n]j j x [n]j + j cos(2πn/10) x [n 1]j j x [n]j + j cos(2πn/10)j j x [n 1]j Bx + 1 Bx = 2Bx = By Esto es, la cota para la salida jy[n]j es By = 2Bx . Como una entrada acotada arbitraria provoca una salida acotada, es sistema es estable entrada/salida. Procesamiento Digital de Señales U.N.S. 2013 3. Señales y sistemas discretos 4 3.2. Demostración de las propiedades de linealidad, causalidad, estabilidad, invariación temporal para sistemas recursivos En los ejemplos del libro las distintas propiedades de los sistemas se estudiaron para sistemas no recursivos. Sin embargo, si el sistema bajo estudio fuese recursivo, es necesario encontrar una forma cerrada que exprese la salida actual sólo en función de la entrada y de las condiciones iniciales, y que no dependa de valores pasados de la salida, como se muestra a continuación. E JEMPLO 3.2. Forma incorrecta de demostrar propiedades en sistemas recursivos Parra probar la propiedad de linealidad del sistema recursivo caracterizado por la ecuación a diferencias y[n] = x [n] + ay[n 1], y[ 1] = 0. donde sólo interesa la salida para n 0, se supone que y1 [n], y2 [n] son las salidas del sistema ante entradas x1 [n], x2 [n]. Es evidente que y1 [n] = x1 [n] + ay1 [n 1], y2 [n] = x2 [n] + ay2 [n 1]. Para probar que el sistema es lineal debe demostrarse que si y3 [n] es la salida del sistema ante la entrada x3 [n] = αx1 [n] + βx2 [n], resulta que y3 [n] = αy1 [n] + βy2 [n]. A partir de la ecuación a diferencias y de la de…nición de x3 [n] puede encontrarse que y3 [ n ] = x3 [n] + ay3 [n 1] = αx1 [n] + βx2 [n] + ay3 [n 1]. El problema es que no se sabe cuánto vale y3 [n 1]! Para probar la propiedad, se debe poder escribir y3 [n] como función sólo de y1 [n] e y2 [n]. Una posibilidad sería escribir x1 [n] y x2 [n] en función de y1 [n], y1 [n 1] y de y2 [n], y2 [n 1], ya que x1 [ n ] = y1 [ n ] ay1 [n 1] x2 [ n ] = y2 [ n ] ay2 [n 1] de modo que y3 [ n ] = αx1 [n] + βx2 [n] + ay3 [n 1] = α (y1 [n] ay1 [n 1]) + β (y2 [n] = αy1 [n] + βy2 [n] + k + a ( αy1 [n ay2 [n 1] 1]) + ay3 [n βy2 [n 1] 1] + y3 [ n 1]) . Note que esta expresión no asegura que y3 [n] = αy1 [n] + βy2 [n], porque queda un término remanente dado por a ( αy1 [n 1] βy2 [n 1] + y3 [n 1]) . Si efectivamente y3 [n] = αy1 [n] + βy2 [n], el término entre paréntesis se anula, pero justamente esto es lo que se debe probar. En realidad, lo que prueba es que y3 [ n ] ay3 [n 1] = α (y1 [n] + ay1 [n Procesamiento Digital de Señales 1]) + β (y2 [n] ay2 [n 1]) . U.N.S. 2013 3.2. Demostración de propiedades en sistemas recursivos 5 Fig. 3.1. Sistema recursivo. E JEMPLO 3.3. Demostración de propiedades en sistemas recursivos Dado el sistema recursivo caracterizado por la ecuación a diferencias y[n] = x [n] + ay[n 1], y[ 1] = c, donde x [n] = 0 para n < 0, y cuyo diagrama bloque se representa en la Fig. 3.1, se desea conocer si el sistema es (i) lineal; (ii) invariante en el tiempo; (iii) causal; (iv ) entrada-salida estable. Para demostrar las propiedades es necesario encontrar una forma cerrada que exprese la salida actual sólo en función de la entrada y de las condiciones iniciales, y que no dependa de valores pasados de la salida. Trabajando por recursión, para n 0 se tiene y [0] = x [0] + ay[ 1] = x [0] + ac, y [1] = x [1] + ay[0] = x [1] + a( x [0] + ac) = x [1] + ax [0] + a2 c, y [2] = x [2] + ay[1] = x [2] + a( x [1] + ax [0] + a2 c) = x [2] + ax [1] + a2 x [0] + a3 c. (3.3) Para n < 0 es conveniente reescribir la ecuación de recursión como y[n 1] = a 1 x [n] + a 1 y [ n ], y[ 1] = c, de donde resulta que y [ 1] = c (por hipótesis) y [ 2] = a 1 x [ 1] + a 1 y [ 1] = 0 + a 1 c = ca y [ 3] = a 1 x [ 2] + a 1 y [ 2] = 0 + a 1 (ca 1 1 ) = ca 2 . (3.4) De las expresiones de (3.3) y (3.4) es sencillo encontrar la forma general y [ n ] = a n +1 c + n ∑ an ` x [`], (3.5) `=0 donde se entiende que la sumatoria no se ejecuta para valores de n < 0. Recién a partir de esta expresión se pueden probar las propiedades. 1. Linealidad: Para probar que es lineal, si y1 [n] es la salida ante una entrada x1 [n], que se puede notar como y1 [n] = Sf x1 [n]g, e y2 [n] la salida ante una entrada x2 [n], notado y2 [n] = Sf x2 [n]g, la salida ante una entrada x3 [n] = αx1 [n] + βx2 [n] debe ser αy1 [n] + βy2 [n]. Vale decir, la salida y1 [n] ante la entrada x1 [n] es y1 [n] = Sf x1 [n]g = an+1 c + n ∑ an ` x1 [`], n 0, ` x2 [`], n 0. `=0 y la salida y2 [n] ante la entrada x2 [n] es y2 [n] = Sf x2 [n]g = an+1 c + Procesamiento Digital de Señales n ∑ an `=0 U.N.S. 2013 3. Señales y sistemas discretos 6 La salida ante una entrada x3 [n] = αx1 [n] + βx2 [n] es y3 [ n ] = Sfαx1 [n] + βx2 [n]g = an+1 c + = a n +1 c + α n ∑ ` an n ∑ an `=0 (αx1 [`] + βx2 [`]), n 0 `=0 n x1 [`] + β ` ∑ an ` x2 [`] (3.6) `=0 Si el sistema es lineal, la salida recientemente calculada debe ser igual a y4 [n] = αy1 [n] + βy2 [n]. Operando se encuentra que ! ! αy1 [n] + βy2 [n] = α a n +1 c + n ∑ an ` + β a n +1 c + x1 [`] `=0 = ( α + β ) α n +1 c + α n ∑ an ` x2 [`] `=0 n ∑ an ` n x1 [`] + β `=0 ∑ an ` x2 [`] (3.7) `=0 Es evidente que (3.6) 6= (3.7), ya que en la primera ecuación aparece un término an+1 c (que no depende de la entrada) mientras que en la segunda aparece el término (α + β)αn+1 c, que tampoco depende de la entrada. En otras palabras, Sfαx1 [n] + βx2 [n]g 6= αy1 [n] + βy2 [n] de modo que el sistema no es lineal. Comentario: El que pueda haber una salida distinta de cero ante una entrada nula es indicativo que el sistema no es lineal, ya que si fuese lineal, la salida se puede expresar en la forma de suma convolución (aún cuando fuese variante en el tiempo), y[n] = ∑ x[`]h[n `], ` de modo que si x [n] 0 ) y[n] 0. La expresión de la salida (3.5) indica que aún cuando x [n] 0, resulta y[n] = an+1 c = an+1 y[ 1] que es distinto de cero salvo si y[ 1] = c = 0. 2. Invariación temporal: Para que el sistema sea invariante en el tiempo, si y1 [n] es la salida del sistema ante una entrada x1 [n] (y1 [n] = Sf x1 [n]g, la respuesta ante una entrada x2 [n] = x1 [n n0 ] debe ser y2 [n] = Sf x2 [n]g = Sf x1 [n n0 ]g = y1 [n n0 ]. Entonces, la salida y1 [n] ante una entrada x1 [n] es: y1 [n] = Sf x1 [n]g = an+1 c + La salida y2 [n] ante una entrada x2 [n] = x1 [n n n0 ∑ n0 n 0. (3.8) n0 ] es n ∑ an ` x1 [` n0 ], n 0. an n0 ) se encuentra que m n0 x 1 [ m ] = a n +1 c + a n m= no = a n +1 c + a n x1 [`], `=0 Haciendo un cambio de variables (m = ` = a n +1 c + ` `=0 n0 ]g = an+1 c + y2 [n] = Sf x2 [n]g = Sf x1 [n y2 [ n ] n ∑ an n0 n n0 ∑ a m x1 [ m ] m= no n n0 ∑ a m x1 [ m ], (3.9) m =0 Procesamiento Digital de Señales U.N.S. 2013 3.2. Demostración de propiedades en sistemas recursivos 7 donde el último cambio de índice inferior en la sumatoria se debe a que x1 [n] = 0 para n < 0. Por otra parte, la salida y1 [n n0 ] es, de acuerdo a la ecuación (3.8), (hay que cambiar n 7! n n0 cada vez que aparezca) y1 [ n n0 ] = a(n n0 )+1 ( n n0 ) ∑ c+ a(n n0 ) ` x1 [`], n 0 `=0 = a(n n0 )+1 c + an n0 n n0 ∑ a ` x1 [`]. (3.10) `=0 Comparando (3.9) con (3.10) se observa que los términos vinculados a la sumatoria, que dependen de la entrada x1 [n], son iguales, mientras que el término que no depende de la entrada en an+1 c en (3.9), y a(n n0 )+1 c en (3.10) . Por lo tanto, y1 [ n n0 ] 6= Sf x1 [n n0 ]g, y en consecuencia el sistema no es invariante en el tiempo. 3. Causalidad: Un sistema es causal si para cualquier elección de n0 , el valor de la sucesión de salida en el instante n = n0 depende sólo de los valores de la sucesión de entrada hasta n = n0 . Esto implica que si x1 [n] = x2 [n] para n n0 , entonces y1 [n] = y2 [n] para n n0 . La salida y1 [n] ante la entrada x1 [n] es y1 [n] = Sf x1 [n]g = an+1 c + n ∑ an ` x1 [`], n 0, ` x2 [`], n 0. `=0 y la salida y2 [n] ante la entrada x2 [n] es y2 [n] = Sf x2 [n]g = an+1 c + n ∑ an `=0 Es evidente que si x1 [n] = x2 [n] para todo n consecuencia el sistema es causal. n0 , también y1 [n] = y2 [n] para n n0 . En 4. Entrada-salida estable: El sistema es entrada-salida estable si entradas acotadas producen salidas acotadas. Si la entrada x [n] está acotada por Bx , esto es, j x [n]j < Bx para todo n, la cota de la salida se puede establecer como jy[n]j = a n +1 c + n ∑ `=0 n a n +1 c + ` an ∑ a n +1 j c j + an ∑ ` j c j j a j n +1 + Bx ∑ an ` x [`] an x [`] ` `=0 j c j j a j n +1 + Bx n `=0 `=0 n = a n +1 c + x [`] n ∑ j ajn j x [`]j ` `=0 1 j a j n +1 1 j aj La cota sobre la salida debe se independiente de n. Pero en este sistema esto se puede lograr porque jcj j ajn+1 no se puede acotar por un número (que no dependa de n). Si j aj > 1, jcj j ajn+1 crece ilimitadamente para n > 0, y si j aj < 1, jcj j ajn+1 crece sin ímite pero para n < 0. Por lo tanto el sistema no es estable. Si permitimos que c = 0, la estabilidad Procesamiento Digital de Señales U.N.S. 2013 3. Señales y sistemas discretos 8 sólo depende del valor de j aj: si j aj > 1 el término (1 j ajn+1 )/(1 j aj) no se puede hacer independiente de n. Por lo tanto el sistema es inestable. Pero si j aj < 1, entonces 1/(1 j aj) < (1 j ajn+1 )/(1 j aj), de modo que jy[n]j Bx 1 j a j n +1 1 j aj Bx = By , 1 j aj y en consecuencia el sistema es estable. Resumiendo, si c 6= 0 ) si c = 0 y j aj < 1 ) si c = 0 y j aj 1 ) sistema inestable, sistema estable, sistema inestable. Es necesario recalcar que en este ejemplo la causa que el sistema no sea lineal e invariante en el tiempo es la presencia de términos que dependen de la condición inicial y[ 1] = c. Al elegir c = 0, el sistema resulta estable e invariante en el tiempo. Esta elección de c no cambia la condición de que el sistema es causal. La estabilidad sólo depende del valor de a. E JEMPLO 3.4. Demostración de propiedades del sistema y[n] + ( 1)n y[n condición inicial y[ 1] = 0. 1] = x [n], con El sistema se puede escribir como una ecuación recursiva de la forma y[n] = ( 1) n y [ n 1 ] + x [ n ] = ( 1 ) n +1 y [ n 1] + x [ n ]. La forma general de la salida en función sólo de la entrada resulta y [0] y [1] y [2] y [3] y [4] y [5] y [6] = ( 1 )0+1 y [ 1 ] + x [ 0 ] = 0 + x [ 0 ] = x [ 0 ] = ( 1) 1+1 y [0] + x [1] = x [0] + x [1] 2+1 y [1] + x [2] = = ( 1) x [0] = ( 1) 3+1 ( x [0] + x [1]) + x [2] y [2] + x [3] = (3.13) x [0] x [1] + x [2] + x [3] = ( 1) y [3] + x [4] = ( x [0] = x [0] + x [1] x [2] x [3] + x [4] 5+1 y [4] + x [4] = x [0] + x [1] 6+1 y [5] + x [5] = = ( 1) = x [0] .. . (3.12) x [1] + x [2] 4+1 = ( 1) (3.11) (3.14) x [1] + x [2] + x [3]) + x [4] (3.15) x [2] x [3] + x [4] + x [5] (3.16) ( x [0] + x [1] x [2] x [3] + x [4] + x [5]) + x [6] x [1] + x [2] + x [3] x [4] x [5] + x [6] (3.17) En este caso no es sencillo encontrar una forma cerrada para la sucesión de salida y[n] en función de la entrada x [n] (los signos cambian de a dos muestras consecutivas de la entrada por vez), pero tampoco hace falta para demostrar las propiedades. Con un poco de trabajo se puede contras que 8 (n 1)/2 > > > (n 1)/2 > ( 1 ) > ∑ ( 1)r (x[2r] + x[2r + 1]), si n es impar, < r =0 y[n] = (3.18) > n/2 1 > > n/2 > > ∑ ( 1)r (x[2r] + x[2r + 1]), si n es par. : x [ n ] + ( 1) r =0 Procesamiento Digital de Señales U.N.S. 2013 3.2. Demostración de propiedades en sistemas recursivos 9 1. Linealidad: Si y1 [n] e y2 [n] son las salidas ante entradas x1 [n] y x2 [n], respectivamente, la salida ante una entrada x3 [n] = ax1 [n] + bx2 [n] es, para n = 0, y3 [0] = x3 [0] = ax1 [0] + bx2 [0] = ay1 [0] + by2 [0]. De manera similar, para n = 1 se tiene que y3 [1] = x3 [0] + x3 [1] = ( ax1 [0] + bx2 [0]) + ( ax1 [1] + bx2 [1]) = a( x1 [0] + x1 [1]) + b( x2 [0] + x2 [1]) = ay1 [1] + by2 [1]. Para n = 2 resulta y3 [2] = x3 [0] x3 [1] + x3 [2] = ( ax1 [0] + bx2 [0]) ( ax1 [1] + bx2 [1]) + ( ax1 [2] + bx2 [2]) = a( x1 [0] x1 [1] + x1 [2]) + b( x2 [0] x2 [1] + x2 [2]) = ay1 [2] + by2 [2] El procedimiento se puede repetir para distintos valores de n, pero es evidente que y3 [n] = ay1 [n] + by2 [n], de modo que el sistema es lineal. 2. Causalidad: De desarrollo recursivo (3.11)-(3.17) o de la forma general (3.18) se observa que y[n] está en función sólo de x [i ], con 0 i n, es decir que la salida actual sólo depende de valores actuales y pasado s de la entrada. Por lo tanto, el sistema es causal. 3. Invariación temporal: el sistema no es invariante en el tiempo por causa del coe…ciente ( 1)n que multiplica a y[n 1]. Se puede probar con un contraejemplo. Si x1 [n] = δ[n], la salida y1 [n] es n 0 1 y1 [ n ] 1 1 Si x2 [n] = x1 [n 1] = δ [ n 2 3 1 1 4 5 1 1 6 7 1 1 8 1 1], la salida y2 [n] es n 0 1 y2 [ n ] 0 1 Se observa que y2 [n] 6= y1 [m 2 3 1 1 4 5 1 1 6 7 1 1 8 1 1], y por lo tanto el sistema no es invariante en el tiempo. 4. Estabilidad entrada/salida: Por la forma de la expresión (3.18) parece que el sistema no es estable entrada/salida. La forma más sencilla de comprobarlo es buscando una sucesión acotada que produzca una salida no acotada. Si se elige x [n] variando entre 1, por ejemplo n 0 1 x [n] 1 1 2 1 3 1 4 5 1 1 4 5 5 6 6 1 7 1 8 1 se encuentra que la salida es n 0 1 y[n] 1 2 2 3 3 4 6 7 7 8 8 9 de modo que aunque j x [n]j 1 = Bx , jy[n]j n + 1, y por lo tanto no existe una cota que asegure que jy[n]j By 8n. En consecuencia, el sistema no es estable entrada-salida. Procesamiento Digital de Señales U.N.S. 2013 10 Procesamiento Digital de Señales 3. Señales y sistemas discretos U.N.S. 2013