Sistemas Y Señales
Anuncio

Sistemas y Señales
Definiciones Básicas
Llamaremos sistema al conjunto de elementos físicos, que relacionados entre sí,
constituyen un todo para cumplir un determinado objetivo.
A las partes distinguibles las llamaremos componente del sistema. El
comportamiento de un sistema está determinado por un conjunto de ecuaciones matemáticas
que relacionan las variables que interconectan diferentes elementos del sistema.
La elección de la variable debe ser tal que :
•
•
Exista la facilidad para medirlas
Entreguen una descripción total del sistema
Lo anterior se puede lograr a través de las leyes físicas inherentes al sistema,
representándolo por una ecuación del sistema.
Como el interés se centra en conocer cuando ocurren las cosas, lo que nos lleva a
la conclusión de que las variables que estudiaremos estarán en función del tiempo.
Visión Externa de un Sistema
Si se toma bajo observación un sistema y lo aislamos del resto del universo, podemos
visualizar que para suministrarle energía o medir alguna variable del sistema debemos atravesar
la zona que separa el sistema del universo.
2
Teoría de Redes I
Respuesta
Excitación
Fuente de
Energia
Sistema
Instrumentos de medición
Puertas del sistema
Figura 1.1. Visión externa de un sistema.
Los puntos de entrada y salida del sistemas se llaman puertas y estas pueden ser:
•
•
Puertas de alimentación (causas). Excitación
Puertas de observación (efectos). Respuesta
Diagrama de Bloque
El diagrama de bloque es un elemento que nos permite caracterizar en forma sencilla los
sistemas, considerando éstos como simples “cajas negras”. Estas cajas negras poseen puertas
de entrada y salida las cuales sirven para comunicarse con el exterior o con otros sistemas y así
crear entes más complejos.
Excitación
Respuesta
Sistema
Figura 1.2. Diagrama de Bloque.
Excitación del sistema : Es un conjunto
simultáneamente al sistema.
de
señales
independientes
aplicadas
Respuesta del sistema : Es el conjunto de cantidades físicas, medidas en las puertas
de observación que nos interesan.
Visión Interna del Sistema
Dentro de un sistema, podemos encontrar subsistemas interconectados entre sí
Sistema
Sub-Sistema 1
Sub-Sistema 2
Sub-Sistema 3
Figura 1.3. Visión Interna de un sistema.
Componente del sistema : Es el elemento básico del sistema. Estos son subsistemas que
por su simplicidad, no es necesario seguir dividiéndolas. Dentro de estas componentes del
Sistemas y señales
3
sistema, existen elementos que almacenan
energético del sistema.
energía,
energía
las
cuales
presentan
un
estado
Estado energético del sistema : Se define estado energético de un sistema en un instante
de tiempo determinado, como el conjunto de los estados de todas las componentes que
almacenan energía del sistema.
Problemas del Análisis y Síntesis
Se dice que se conoce un sistema si se contestan las siguientes interrogantes :
•
•
•
¿Qué componentes forman el sistema?
¿Cómo se interconectan?
¿Cuál es el estado del sistema?
De acuerdo con esto podemos definir dos situaciones:
Análisis del sistema : Es el estudio que nos permite determinar como responde un
sistema conocido a una cierta excitación dada.
Síntesis del sistema : Es el estudio de la construcción de un sistema a partir de una
relación dada entre la excitación y la respuesta.
Tipos de Variables Asociadas a los sistemas
Los sistemas pueden ser representados como simples cajas negras, la fig. 1.4 establece
algunos elementos básicos en la caja negra
v1
v2
vn
y1
u1
u2
un
Sistema
x1(0) , ........, x (0)
n
y
2
yn
Figura 1.4. Variables asociadas a un sistema.
Como se indica en la fig. 1.4, se distinguen distintos tipos de variables:
Entradas ( ui ): La entrada es un estímulo o excitación aplicada desde una fuente de energía
externa. Usualmente para producir un respuesta determinada por ésta.
4
Teoría de Redes I
Perturbación (vi): Es una entrada indeseable que afecta la salida del sistema, puede ser medible
o no medible.
Salidas ( yi): Son las respuestas obtenidas del sistema ante estímulos externos aplicados.
Existen adicionalmente las salidas suprimidas, llamadas también variables internas.
Estados (xi), Son las variables que definen el estado energético del sistema.
Para el caso de un sistema determinístico, el conocer la función de entrada para todo
t>t0, y los estados iniciales en t=t0, es posible determinar completamente una única señal de
salida para t>t0.
Clasificación y Tipos de Sistemas
Existen diferentes formas de clasificar los sistemas, algunas de las cuales se indican a
continuación.
Sistemas lineales y no lineales
Sean e1 (t) la excitación de un sistema y r1 (t) la respuesta del sistema a e1(t).
Sea e2(t) la excitación al mismo sistema anterior r2 (t) la respuesta del sistema a e2(t) .
Se dice que el sistema es lineal si y solo si se cumple :
Sistema Lineal
Ar (t) + Br (t)
1
2
Ae1 (t) + Be (t)
2
Donde A, B ctes. reales
Figura 1.5. Entrada y salida de un sistema lineal.
Es decir , en un sistema lineal se cumplen las principios de homogeneidad y
superposición.
superposición
Propiedad de Homogeneidad (proporcionalidad): Si la excitación es aumentada (o disminuida)
por una constante, la respuesta también es aumentada (o disminuida) por la misma
constante.
Sistema Lineal
Ae1(t)
Ar1(t)
Figura 1.6. Propiedad de Homogeneidad.
Propiedad de Superposición: Si el sistema se excita con más de una señal (excitación) de
entrada, la respuesta será la suma de las respuestas correspondiente a cada excitación
de entrada.
Sistemas y señales
5
e (t) +e (t)+e (t)+...+e n(t)
1
2
3
r (t) +r (t)+r (t)+...+r (t)
1
2
3
n
Sistema Lineal
Figura 1.7. Propiedad de Superposición.
Básicamente esto significa que si se aplican dos (o más) excitaciones al sistema en
forma separada, y se obtienen dos (o más) respuestas, al aplicar ahora una excitación que
corresponda a la suma de dos (o más) excitaciones, se debería obtener, una respuesta igual a la
suma de las respuestas independientes.
Finalmente, un sistema lineal se caracteriza por tener una relación entrada - salida de la
siguiente forma
r (e)
r (e)
e
e
Figura 1.8. Curva característica de un sistema lineal.
Donde e es la excitación y r es la respuesta en función de la excitación. Si la excitación es
una función dependiente del tiempo, es decir, e(t), la respuesta r también será función del tiempo.
Ejemplo
Sea la siguiente curva de entrada /salida de un sistema y e(t) la excitación. Aplicar la
propiedad de homogeneidad.
r (e)
e(t)
A
m
1
e
0
t1
t2
t
Para aplicar esta propiedad, primero se debe determinar la respuesta asociada a la
excitación.
6
Teoría de Redes I
r (t ) = m ⋅ e(t )
Como la propiedad establece que se debe multiplicar la excitación por una constante,
entonces, sea
eK (t ) = K ⋅ e(t )
Luego, la respuesta a dicha excitación será
rK (t ) = m ⋅ eK (t )
reemplazando
rK (t ) = m ⋅ {K ⋅ e(t )}
rK (t ) = K ⋅ {m ⋅ e(t )}
rK (t ) = K ⋅ {r (t )}
La propiedad de homogeneidad dice que la respuesta de un sistema sometido a una
excitación Ke(t), deberá ser igual a la respuesta Kr(t), donde r(t) es la respuesta producto de la
excitación e(t).
Observe que si se toma la respuesta
r (t ) = m ⋅ e(t )
Y se multiplica por K, entonces esta nueva función
K ⋅ r (t ) = K ⋅ m ⋅ e(t )
Será igual a rK(t), luego se cumple la propiedad de homogeneidad.
Ejemplo
Considere el sistema del ejemplo anterior y las entradas e1(t) y e2(t). Aplique la propiedad
de superposición.
e (t)
1
r (e)
A
m
1
0
e
t1
t2
t
e (t)
2
C
0
t
Sistemas y señales
7
El aplicar esta propiedad requiere conocer las respuestas de las dos excitaciones, sean
r1 (t ) = m ⋅ e1 (t )
r2 (t ) = m ⋅ e2 (t )
Las respuestas del sistema debido a las excitaciones e1(t) y e2(t). Luego, la propiedad de
superposición establece que se debe ingresar la suma de las dos excitaciones y determinar su
respuesta.
Sea la nueva excitación
eS (t ) = e1 (t ) + e2 (t )
Luego, la respuesta a dicha excitación será
rS (t ) = m ⋅ eS (t )
Reemplazando
rS (t ) = m ⋅ {e1 (t )+ e2 (t )}
rS (t ) = m ⋅ e1 (t ) + m ⋅ e2 (t )
rS (t ) = r1 (t ) + r2 (t )
Ahora, si se consideran las respuestas individuales obtenidas inicialmente, la propiedad de
superposición dice que, la suma de estas respuestas individuales debe ser igual a la respuesta
obtenida usando como excitación la suma de las excitaciones individuales.
Como se puede apreciar, esta situación ocurre, pues rS(t) es igual a la suma de las
respuestas obtenidas individualmente.
El sistema planteado en el ejemplo cumple con ambas propiedades, resulta bastante simple de
trabajar, pues, su respuesta no es más que la excitación multiplicada por m, que es el parámetro que
relaciona la entrada con la salida.
Tarea
Demostrar ambas propiedades gráficamente, usando la curva de entrada salida y las
excitaciones dadas en el ejemplo 2.
Sistemas Activos y Pasivos
Sistemas Activos: Son aquellos sistemas que bajo alguna condición de excitación y
durante algún intervalo de tiempo, son capaces transformar algún tipo de energía que les ha
sido suministrada por la excitación para ser utilizada en la obtención del objetivo del sistema.
8
Teoría de Redes I
Energía
Excitación
respuesta
Sistema Activo
Figura 1.9. Sistema Activo.
También se dice que un sistema activo es un sistema que tiene componentes activas.
Estas componentes activas sirven para proveer la energía para el funcionamiento de otras
componentes del sistema. Como todos los sistemas (eléctricos, mecánicos, electrónicos, etc.),
este transforma la energía .
Un amplificador de audio recibe señales de baja potencia, ya sea de un sistema Toca cinta
(“DECK”) o de un CD Player, estas señales son amplificadas y la señal de salida, que va a los
parlantes (Música), es de mayor potencia. La cantidad de energía restante, para proveer dicha
potencia, es provista por el amplificador a través de su fuente de alimentación (red de 220
volts), la cual le permite funcionar.
220 V
e(t)
DECK
r(t)
Entrada Amplificador Salida
(Potencia)
(Audio)
Parlantes
Figura 1.10. Equipo de audio.
Podríamos considerar una radio, la cual capta a través de su antena la señal de la
emisora, esta es transformada y se manifiesta en la salida del parlante.
Sistemas pasivos: Por lo general, todos los sistemas son pasivos cuando no existe ninguna
excitación para que ocurra el proceso de transformación de energía.
Sistemas Variantes e In variantes en el tiempo
Sistema invariante en el tiempo : Es cuando la relación excitación - respuesta no dependen
del instante en que es aplicada la excitación. Esto implica que la componentes del
sistema permanecen constantes.
e (t)
e (t-a)
Sistema Invariante
en el Tiempo
Sistema Invariante
en el Tiempo
r (t)
r (t-a)
Figura 1.11. Sistema Invariante en el tiempo.
Sistemas y señales
9
En la práctica ningún sistema es invariante en el tiempo, pues, sus parámetros son
afectados por determinados factores, sobretodo ambientales. La temperatura por ejemplo suele
ser un factor importante en muchos sistemas electrónicos, ya que hace que la operación de
dichos sistemas sea inapropiada. Si logramos controlar algunos factores externos, podríamos
considerar que un sistema mantiene sus parámetros invariables, pero sólo por un período muy
pequeño de tiempo. Por otro lado, un sistema mecánico puede ser considerado como un sistema
variante en el tiempo, pues, resulta natural el hecho de que sus partes o componentes sufran
deterioros.
Sistemas Determinísticos y Probabilísticos
Un sistema es determinístico cuando existe una relación unívoca entre la excitación y la
respuesta. Es decir, que existe certeza que para determinada excitación la respuesta también
será conocida.
En el caso de un sistema probabilístico, solo tenemos un valor de una determinada
probabilidad del valor de la respuesta.
Los sistemas Estocásticos, son una extensión de los probabilísticos pero consideran
además una variable temporal.
Sistemas de Parámetros Concentrados y Distribuidos
Los sistemas según su estructura pueden ser de parámetros concentrados o
distribuidos. Un elemento puede considerarse concentrado, si su tamaño es despreciable
comparado con la longitud de onda, correspondiente a la frecuencia normal de operación del
sistema.
En el caso de parámetros concentrados, el modelo matemático que resulta es un sistema
de ecuaciones diferenciales ordinarias (las variables sólo serán en función del tiempo).
Por el contrario, si el sistema se de parámetros distribuidos generará un sistema de
ecuaciones en derivadas parciales; esto ocurre cuando al menos una de las variables es función a
la ve<za del tiempo y del espacio. Ej. Una línea de transmisión, pues, sus parámetros varían de
acuerdo a la distancia.
Sistemas Analógicos y Digitales
Sistema análogo : Son aquellos cuyas excitaciones y respuestas pueden tomar valores
continuos. Muchos amplificadores de audio son todavía analógicos.
Sistema digital : Cuando la excitación y la respuesta toman valores discretos. Por ejemplo un
microprocesador (componente fundamental de un computador) es un sistema digital. La gran
mayoría de los sistemas digitales trabaja la información en forma numérica.
f(t)
f(t)
t
Figura 1.12. Señal Análoga y señal discreta.
t
10
Teoría de Redes I
Sistemas Electrónicos y de Poder
Antiguamente la capacidad para manejar la energía eléctrica hacía la diferencia entre los
sistemas electrónicos y de Poder. Hoy Muchos sistemas electrónicos son capaces de manejar
grandes cantidades de energía.
Sistema de poder : Son aquellos que pueden realizar trabajos que demanden gran
cantidad de energía, además ellos poseen dimensiones físicas “grandes”. Por ejemplo , para
sistemas eléctricos que circulan corrientes altas de valores de más de un Ampere.
Sistemas electrónicos: Poseen dimensiones físicas mucho menores que las anteriores y
están asociados al manejo de señales de pequeña potencia.
Formulación de Sistemas
Relaciones matemáticas del sistema : Esto implica, conocer las relaciones
matemáticas de las variables de cada componente (leyes físicas) y las relaciones
matemáticas de las variables a través de las conexiones de las componentes.
Sistema Físico
Modelo Simbólico
Modelo Matemático
Figura 1.13. Elementos para la formulación de un sistema.
Para la formulación del sistema se debe tener muy claro la simbología
las leyes físicas que gobiernan a cada uno de los componentes del sistema.
a usar y
Ejemplos de algunos sistemas
Un generador eléctrico, es un sistema que tiene una puerta mecánica y eléctrica de
entrada y una puerta de salida que entrega energía eléctrica. En este caso una turbina o motor
genera el movimiento, el cual es transformado en energía eléctrica.
Un sistema de bases de datos puede ser visto de tal forma que las excitaciones son las
consultas realizadas por el usuario, cuyo resultado corresponde a la respuesta obtenida.
Un acondicionador de señal es un sistema que transforma señales emitidas por algún
sensor o transductor, de tal forma de entregar en su salida una señal de magnitud estándar
compatible con un instrumento industrial de medición.
Un manipulador mecánico accionado digitalmente, permite el posicionamiento de alguna
herramienta (fresa) el cual es controlado por un computador o microprocesador
Sistemas y señales
11
Interconexión de sistemas
Los sistemas dependiendo del tipo de entrada y salida que tengan pueden ser
interconectados, de tal modo de formar nuevos sistemas mucho “más grandes” y con objetivos
distintos a los planteados para los sistemas originales. Existe una conexiones básica llamada
conexión en cascada en la cual la salida de un sistema es conectada con la entrada de otro
sistema. Como se indica en la fig. 1.14 , la entrada e2(t) tomará el valor de la salida r1(t). La
relación de entrada salida del sistema estará dada por e1 / r2.
e1
Sistema-1
Donde
r 1 e2
r2
Sistema-2
r2
e1
Nuevo Sistema
r 1 = e2
Figura 1.14. Sistemas conectados en cascada.
Un ejemplo clásico de sistemas conectados en cascada, son los amplificadores
multietapa, los cuales son conectados de esa forma para mejorar la capacidad de amplificación.
Existen otro tipo de conexiones de sistemas que pueden ser más complejas en los cuales las
entradas pueden alimentar a múltiples sistemas y a su vez la salidas de éstos pueden ser
sumadas.
Ejemplo
Considere los sistemas S1 y S2 los cuales son conectados en cascada, es decir, la salida
de uno es la entrada del otro. Determine la relación de entrada - salida, r/e1 del nuevo sistema.
r1 (e1 )
r2 (e2 )
m1
e1
m2
1
e1
S1
r1
e2
S2
e2
1
Las respuestas de cada sistema individual
r1 (t ) = m1 ⋅ e1 (t )
r2 (t ) = m2 ⋅ e2 (t )
Pero
r1 (t ) = e2 (t )
Luego
r2 (t ) = m2 ⋅ e2 (t ) = m2 ⋅ r1 (t ) = m2 ⋅ {m1 ⋅ e1 (t )}
Adicionalmente
r (t ) = r2 (t )
Finalmente
r2
r
12
Teoría de Redes I
r (t ) = m2 ⋅ {m1 ⋅ e1 (t )}
Ejemplo
Considerando los mismos sistemas del ejemplo anterior, determine la curva r/e1
e1
S1
S
2
r1
r
+
+
r2
En el sistema mostrado, la entrada e1 alimenta los sistemas S1 y S2, por otro lado, las
salidas de ambos sistemas son sumadas para obtener una nueva respuesta del sistema.
Considerando el sistema mostrado se tiene
r1 (t ) = m1 ⋅ e1 (t )
r2 (t ) = m2 ⋅ e1 (t )
Pero
r (t ) = r1 (t ) + r2 (t )
r (t ) = m1 e1 (t ) + m2 ⋅ e1 (t )
Finalmente
r (t ) = (m1 + m2 )e1 (t )
Sistemas y señales
13
Señales
Muchos de los sistemas eléctricos y electrónicos son alimentados por fuentes de energía
las cuales pueden variar o no en función del tiempo. Las señales son funciones de una o más
variables independientes y contienen información a cerca de la naturaleza o comportamiento de
algún fenómeno físico, como por ejemplo, las corrientes o los voltajes en un sistema eléctrico, los
cuales fuerzan a una respuesta al sistema eléctrico.
Estas señales pueden ser representadas mediante formas de onda o funciones cuyo
argumento, para nuestro interés, es el tiempo. En el presente apartado se clasifican y
caracterizan estas señales.
f(t)
t
Figura 1.15. Señales como funciones variables en el tiempo.
Clasificación desde el punto de vista de los sistemas
Estas pueden ser de Entrada o de Salida.
Señales de Entrada:
Estas pueden ser de dos tipos Excitaciones y Perturbaciones. En las primeras, existe
control sobre ellas, pueden ser manipuladas a voluntad, pueden tomar cualquier valor que se
desee, obviamente dependiendo de los rangos máximos permitidos para dicha fuente de energía y
en las segundas no existe control y pueden ocurrir en cualquier momento. Por lo general son
entradas indeseables, tales como Ruido en el caso de un sistema de radio comunicación, la
apertura de una puerta en el caso de un sistema térmico, etc.
Señales de Salida
Estas señales pueden ser Respuesta o Variables Internas. La respuesta es la señal
entregada por el sistema como consecuencia de alguna señal de excitación (o perturbación). Las
variables internas son señales que representan las salidas de las diferentes componentes
internas del sistema.
Clasificación desde el punto de vista de su comportamiento en el tiempo.
Estas señales se clasifican en Periódicas y aperiódicas. Sea f(t) una señal, ésta será
periódica si y solo si se cumple que
f (t ) = f (t + nT )
14
Teoría de Redes I
Donde T es el período de la señal y n es un valor entero.
Estas señales presentan un comportamiento que se repite después de determinado
tiempo. En las señales aperiódicas no existe este comportamiento repetitivo, luego no se cumple
lo planteado inicialmente.
La Fig. 1.16 muestra señales periódicas clásicas usadas en ingeniería Eléctrica y
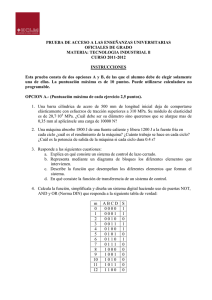
Electrónica. Se tiene un tren de pulsos, dientes de cierra, señal sinusoidal rectificada.
f (t)
f (t)
a
a
T
2T
t
3T
2T
T
t
3T
(a)
(b)
f(t)
A
π
2π
ωt
3π
(c)
Figura 1.16. Señales periódicas. (a) Tren de Pulsos. (b) Diente de Sierra. (c) Señal sinusoidal rectificaca.
Señales Pares e Impares
Una señal es par si es idéntica a su reflexión alrededor del origen es decir:
f (t ) = f (− t )
Una señal es impar si se cumplen que :
f (t ) = − f (− t )
La Fig. 1.17 muestra los ejemplos de señales pares e impares.
f(t)
b
-b
f(t)
f(b)=f(-b)
A
ωt
b
-b
-C
-A
f(b)=-f(-b)
A
C
-A
(a)
(b)
Figura 1.17. Ejemplo de señales. (a) Pares. (b) Impares.
ωt
Sistemas y señales
15
Señales Típicas
Existen ciertos tipos de señales que son encontradas frecuentemente al trabajar con
sistemas eléctricos y electrónicos, la gran mayoría son funciones que dependen del tiempo.
f(t)
f(t)
f(t)=C
f(t)=A sen ω t
A
C
ωt
0
t
-A
f(t)
f(t)
f(t)=Ke αt
f(t)=Ke -at
k
k
0
0
t
t
Figura 1.18. Señales típicas usadas en un sistema eléctrico.
La señal constante, es decir, la que tiene un valor fijo para cualquier instante
tiempo, es comúnmente llamada señal continua, se asocia habitualmente a una batería o pila, la
cual entrega un valor fijo de voltaje entre sus terminales para todo instante de tiempo en
condiciones ideales.
La función sinusoidal es una señal conocida como señal alterna es utilizada para el
análisis de diferentes sistema eléctricos y electrónicos, pues la gran mayoría de éstos son
excitados por este tipo de señal.
La señales exponenciales están asociadas a la respuesta de algunos sistemas lineales,
producto de haberse producido alguna “conmutación” en dicho sistema.
No son las únicas, una combinación de dichas señales serán también parte del exhaustivo análisis
en este curso.
Señales singulares
Las señales singulares son formas de onda básicas no diferenciables formalmente
(presentan discontinuidades), representables en forma matemática muy simple, y sirven para
construir un gran número de señales. Estas señales sólo pueden concebirse en sistemas ideales.
Señal Escalón Unitario u((t)
u(t)
1
0-
0+
0
Figura 1.19. Escalón Unitario.
t
0
t < 0−
u(t ) = indetermin ado t = 0
1
t > 0+
16
Teoría de Redes I
Esta señal se hace cero cuando el argumento es negativo y toma el valor 1 cuando el
argumento es positivo. Al multiplicar la función escalón por una constante, esta toma el valor de
la constante cuando su argumento toma el valor positivo y cero en el otro caso.
f (t ) = C ⋅ u(t )
Observe que C puede tomar distintos valores, en el caso de ser negativo, C=-K1, tenemos
lo siguiente
f(t)
f(t)=-K1 u(t)
0
t
-K1
Figura 1.20. Escalón Unitario multiplicado por una constante negativa.
Se puede también atrasar o adelantar la función en el tiempo, esto se logra cambiando el
argumento de la función ya sea sumándole o restándole una constante, es decir
f(t)
f(t)
1
1
0
a
-a
t
0
t
Figura 1.21. Escalón Unitario atrasado y adelantado en el tiempo.
Para invertir la señal con respecto al tiempo (inversión de fase) sólo se debe cambiar el
argumento a “menos su argumento”, es decir u(-t)
f(t)
1
0
t
Figura 1.22. Escalón Unitario con argumento negativo.
Físicamente la función escalón se puede obtener usando una fuente de energía que tenga
un valor constante en conjunto con un interruptor, pues, cuando éste esta abierto la excitación
esta en cero y cuando el interruptor se cierra, la excitación toma el valor de la fuente de energía
(Se produce un cambio abrupto). Evidentemente se debe considerar que el tiempo que se demora
el interruptor en abrir y cerrar es cero.
Sistemas y señales
17
t=0
t=0
+
Sistema
1.5 Volts
Sistema 2
Sistema 1
_
Figura 1.23. Implementación Física de un escalón.
Señal Rampa Unitaria r(t)
La siguiente señal se conoce como Rampa Unitaria.
r(t)
1
0 t ≤ 0
r (t ) =
t t ≥ 0
t
1
Figura 1.24. Rampa unitaria.
Esta señal Toma el valor cero cuando su argumento es negativo y toma el valor t cuando
su argumento es positivo. La rampa puede expresarse en función de la señal escalón, es decir
r (t ) = t ⋅ u(t )
La rampa unitaria tiene pendiente igual a 1, y para cambiarla basta con multiplicar dicha
rampa por una constante. La pendiente entonces tomará dicho valor.
f (t ) = C ⋅ r (t )
Al igual que el escalón unitario, la función rampa puede desplazarse en el tiempo,
provocándose un adelanto o un atraso de la señal de la siguiente forma:
r(t)
r(t)
1
1
a
a+1
r(t-a)
t
-a
1-a
r(t+a)
Figura 1.25. Rampa Unitaria atrasado y adelantado en el tiempo.
t
18
Teoría de Redes I
Para esta función se cumple lo siguiente:
t
r (t ) = ∫ u(τ )dτ
−∞
Entonces
r (t ) = τ ⋅ u(τ ) t−∞ = t ⋅ u(t )− 0
o
u (t ) =
dr (t )
dt
Señal Impulso o Delta De Dirac δ ( t))
La siguiente función se conoce como Delta de Dirac o Función Impulso unitario
δ (t)
(1)
0 t ≠ 0
δ (t ) =
∞ t = 0
t
0
Figura 1.26. Impulso Unitario.
La función impulso unitario se relaciona con la función escalón mediante la siguiente
expresión:
t
u (t ) = ∫ δ (τ )dτ
−∞
Donde la función escalón unitario es la integral de la función impulso unitario. De la
expresión se deduce que:
δ (t ) =
du (t )
dt
A partir de esto es posible determinar el área bajo la curva, es decir
∞
Area = ∫ δ (τ )dτ =
−∞
0+
du(τ )
dτ = ∫ du(τ ) = u(τ ) 00 +− = u(0 + )− u(0 − ) = 1 − 0 = 1
0 − dτ
0−
0+
∫
Es obvio que existe alguna dificultad formal con la derivada, como una definición de
impulso unitario, ya u(t) es discontinua en t=0 y en consecuencia NO es diferenciable formalmente.
Sistemas y señales
19
Sin embargo, podemos interpretar esta ecuación considerando a u(t) como el límite de una función
continua.
Definamos uε(t) como se indica en la siguiente figura.
u ε (t)
δε (t)
1
0
1
t
ε
ε
0
ε
t
Figura 1.27. Funciones continuas que llevadas al límite representa un escalón y una rampa respectivamente.
Por lo tanto u(t) se define como
u (t ) = lim u ε (t )
ε →0
Luego definimos δ ε ( t) como:
δ ε (t ) =
du ε (t )
dt
Observemos que δε (t) tiene un área unitaria para cualquier valor de ε, y es cero fuera del
intervalo (0 , ε). Note que mientras más angosto se hace el intervalo, la función se hace más
angosta y más alta manteniendo el área unitaria en su forma límite.
u ε (t)
1
0
δε (t)
t
ε
1
ε
1
ε
t
0 ε ε
Figura 1.28. Haciendo el límite en forma gráfica.
δ (t ) = lim δ ε (t )
ε →0
20
Teoría de Redes I
Observe que el área siempre es unitaria, debido al producto de la base por la altura del
rectángulo. En forma más general, la función impulso multiplicada por una constante K tendrá un
área bajo la curva igual a K. Es importante mencionar que la amplitud de impulso es infinita.
infinita
Al igual que las señales anteriores, podemos desplazarla del origen sumándole o
restándole una constante, la que producirá el corrimiento a ese valor cuando el argumento
sea cero.
δ (t)
δ (t)
(1)
0
a
(1)
t
-a
δ (t − a )
0
t
δ (t + a )
Figura 1.29. Impulso Unitario atrasado y adelantado en el tiempo.
Señal Exponencial Compleja Y Sinusoidal
Este tipo de señal se caracteriza por la siguiente forma :
f (t ) = Ke st
Donde s=±α ± jω y K es real.
Dependiendo de los valores de estos parámetros, la exponencial compleja puede
adoptar varias características diferentes.
Considere s real, s=α:
f (t ) = Keαt
•
Para s=α, positivo, se tiene una exponencial creciente, cuyo valor para t=0 es K. Esta
señal es utilizada para describir una amplia variedad de fenómenos, incluyendo
reacciones en cadena en explosiones atómicas, reacciones químicas complejas, etc.
•
Para s=-α, negativo, se tiene una exponencial decreciente, cuyo valor para t=0 es K. Esta
forma de señal también es usada para describir una amplia variedad de fenómenos
tales como la respuesta de circuitos RC, de sistemas mecánicos amortiguados y
muchos otros más.
•
La unidad de α, es la de t-1, este coeficiente mide la rapidez de cambio de la señal.
Al inverso de α se designa con la letra τ , llamada constante de tiempo, y su unidad
es la misma de t.
Sistemas y señales
21
f (t ) = Ke
f(t)
f(t)
-t
−α t
f(t)=Ke
= Keτ
k
t
τ
t
αt
τ
f(t)=Ke = Ke
k
0
τ
0
t
t
Figura 1.30. Curvas exponenciales decreciente y creciente.
La constante de tiempo τ corresponde al tiempo en el cual la señal exponencial ha decaído
un 63% del valor máximo.
Esta señal puede también estar desplazada en el tiempo, ello se logra sumando o
restando un valor constante en el argumento de la función.
f(t)
f(t)
k
f(t)=Ke -a(t-b)
f(t)=Ke -a(t+b)
k
t
-b 0
0
b
t
Figura 1.31. Curva exponencial decreciente desplazada en el tiempo.(a) Adelantada (b) Retrasada
Tarea
Graficar las siguientes señales. Considere los valores de t hasta cinco veces la constante
de tiempo. ¿Cuál es la constante de tiempo de cada curva?.
f (t ) = 3e −0.05t
f (t ) = 2(1 − e −0.05t )
f (t ) = −4(1 − e −0.1 t )
Para valores de s complejo conjugado :
Si se fuerza que s sea solo imaginaria, es decir, de la forma
22
Teoría de Redes I
f (t ) = Ke ± jωt , s = ± jω
Luego utilizando la relación de Euler, la cual asocia a las exponenciales complejas
con las sinusoides, se tiene:
e jωt = cos ωt + j sen ωt
o
Ke jωt = K cos ωt + jK sen ωt
Sea
Ke − jωt = K cos ωt − jK sen ωt
Entonces, si se suman ambas ecuaciones
Ke jωt + Ke − jωt = K cos ωt + jK sen ω + K cos ωt − jK sen ωt = 2K cos ωt
Claramente se llega a
e jωt + e − jωt
cos ωt =
2
Restando las ecuaciones, se tiene
sen ωt =
e jωt − e − jωt
2j
Observe que se está en presencia de una señal periódica.
En forma general se puede decir que la parte real de una
correspondería a una señal sinusoidal de la siguiente forma:
exponencial
f (t ) = Re{Ke j (ωt +φ ) }= K cos(ωt + φ )
Y la parte imaginaria corresponde a
f (t ) = Im{Ke j (ωt +φ ) }= K sen (ωt + φ )
La Fig. 1.31 muestra las señales seno y coseno adelantadas en un ángulo φ.
compleja,
Sistemas y señales
23
f(t)
φ
K sen( ω t+ φ )
ωt
K cos( ω t+φ )
Figura 1.31. Señal sinusoidal.
Donde ω es llamada frecuencia angular de la sinusoide, y está relacionada con el
período de la señal T de la siguiente manera:
ω=
2π
T
rad
seg
Y φ corresponde al ángulo de fase de esta señal, es decir, que para t=0, el valor
de f(t) es
f (0 ) = K cos φ
K corresponde a la amplitud de la señal.
Por lo general φ está en grados, luego conviene dejar ω en [º/seg], es decir
ω=
360 º
T seg
Para K es real y s=0
Se genera lo que llamamos señal continua y su valor es igual a K.
f(t)
f(t)=K
K
0
Figura 1.32. Señal continua.
t
24
Teoría de Redes I
Descomposición de señales
En este punto se verá como se pueden componer diferentes formas de señales,
utilizando las presentadas anteriormente.
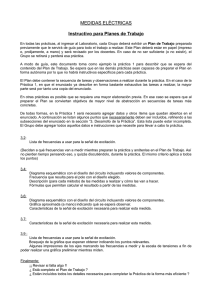
Suponga que se quiere representar la función de la fig. 1.33. como la suma de
señales conocidas.
f(t)
4
a=1
-1 0
3
6
12
15
t
-2
Figura 1.33. Señal compuesta por diferentes funciones variables en el tiempo.
Note que dicha señal tiene componentes con pendiente, componentes que se mantienen en
un valor constante durante un determinado instante de tiempo, componentes que cambian
abruptamente y componentes que caen con cierta “suavidad”.
f1 (t)
f3 (t)
f2 (t)
f 2(t)=-r(t-3)
4
f 1 (t)=r(t+1)
-1 0
0
6
-3
3
f 4(t)=-4u(t-6)
f 4 (t)
3
-1 0
f5 (t)
f 5(t)=f 3 (t)+ f4 (t)
4
0
3
-1 0
f7 (t)=f6(t)+ f5 (t)
4
-1 0
3
f6 (t)
3
-(t-6)
f 6(t)={u(t-6)-u(t-12)} 4e
4
6
-4
f 7 (t)
f 3(t)=f 1 (t)+ f2 (t)
4
6
12
15
t
3
6
0
6
t
Sistemas y señales
f 8 (t)
25
f9 (t)
f8 (t)=-2u(t-12)
0
6
f9 (t)=2u(t-15)
f 10(t)
2
12
f10(t)=f9 (t)+f 8(t)
0
6
12
15
-2
0
6
12
15
-2
f7 (t)=f6(t)+ f5 (t)
f 7 (t)
f(t)
4
4
f 10(t)
a=1
f10(t)=f9 (t)+f 8(t)
-1 0
3
6
12
15
t
0
-2
6
12
15
-1 0
3
6
12
-2
Finalmente sumando f7(t) y f10(t) se obtiene la señal original. La expresión analítica para la
función es la siguiente
f (t ) = r (t + 1) − r (t − 3) − 4u(t − 6 ) + {u(t − 6 ) − u(t − 12 )}4 e − a (t −6 ) − 2u(t − 12 ) + 2 u(t − 15)
o podría considerarse
f (t ) = r (t + 1) − r (t − 3 ) − 4u(t − 6 ) + u(t − 6 )4 e − a (t −6 ) − 2 u(t − 12 ) + 2u(t − 15)
Tomando en cuenta que la exponencial es aproximadamente cero para 5 veces la
constante de tiempo.
Tarea
Construir las señales periódicas de la Fig. 1.16a y Fig. 1.20b en base a señales singulares.
Considere período T.
Valores Instantáneos, Máximos, Peak to Peak, Medios y Efectivos de señales
Sinusoidales
Valor Instantáneo
El valor instantáneo de una señal se define como el valor que toma dicha función
en un tiempo determinado.
Ejemplo
15
t
26
Teoría de Redes I
Sea f(t) = 4 sen ( 3t + 30o )
instantáneo en dicho tiempo.
Si evaluamos la función en t=6, tendremos el valor
6(180 )
f (6 ) = 4 sen 3
+ 30 = −1.28
π
Sea f(t) = 3 e-2t , luego el valor instantáneo en t=5 es
f(5) = 3 e-2*5 = 4,54.10-5
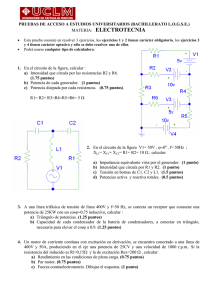
Valor Máximo y Valor Peak to Peak
Es el valor máximo que toma la función en algún intervalo de tiempo considerado.
También es llamado valor “Peak”
Ejemplo
Sea f(t) = 4 cos( 5 π t + 19), el valor máximo de esta señal es 4.
El valor “peak to peak” o Valor “Cresta a Cresta” se define como 2 veces el valor
máximo de la señal.
f(t)
f(t)=A sen ω t
A
V máximo
V peak-peak
T
ωt
-A
Figura 1.34. Valor máximo y valor Peak de una señal.
Valor Medio
Se define como la media algebraica de los valores instantáneos durante un
periodo. El valor medio de la señal f(t) =Fm, luego se tiene
Fm =
1 t2
∫ f (t )dt
t 2 − t 1 t1
Sistemas y señales
27
Para el caso de una señal periódica, se tiene
Fm =
1T
∫ f (t )dt
To
Donde T es el periodo de la señal.
En el caso de las sinusoides, siempre que no esté desplazada respecto de su origen,
este valor seria cero. Ahora, si la señal tiene un desplazamiento, el valor medio corresponde a
dicho desplazamiento, se indica en la siguiente figura.
f(t)
Valor medio
T
ωt
Figura 1.35. Valor medio de una señal sinusoidal desplazada.
Ejemplo
Calcular el valor medio de la siguiente señal periódica. Si se considera que el periodo es T.
f(t)
A
ωt
T 2
T
El valor medio calculado sería en un semi-periodo, debido a que la señal vale cero en el
resto del período.
Fmed =
1 T /2
∫ f (t )dt
T o
Fmed =
1 T /2
f (t )dt
T ∫o
28
Teoría de Redes I
Fmed =
A
A
1 π
{− cos πt}π0 =
A sen ωtdωt =
∫
π
2π o
2π
Valor Eficaz o Efectivo o RMS (Root Means Square)
Es la raíz cuadrada de la media de los cuadrados de los valores instantáneos
alcanzados durante un periodo o ciclo completo. El valor efectivo de f(t) será Fef, luego
1
t 2 − t1
Fef = FRMS =
t2
2
∫ f (t )dt
t1
El significado físico es el siguiente:
La energía que disipará una corriente i(t) en una resistencia durante un lapso de tiempo,
t2-t1, se identifica con lo que disiparía en iguales condiciones una corriente constante de valor Ief.
El valor Ief así calculado se define como el valor efectivo o eficaz de la corriente i(t) en el lapso t2t1.
Si la energía en el periodo de tiempo t2-t1 se define como
t2
W (t 2 − t1 ) = ∫ p(t )dt
t1
En la cual p(t) es la potencia. Reemplazando, la potencia en función de la corriente, donde
R es la resistencia eléctrica, se tiene
t2
t2
t1
t1
W (t 2 − t1 ) = ∫ Ri 2 (t )dt = R ∫ i 2 (t )dt
Llamando a i(t)=Ief
t2
t2
t1
t1
R ∫ i 2 (t )dt = R ∫ I 2ef dt
Simplificando
t2
t2
t1
t1
2
2
∫ i (t )dt = ∫ I ef dt
Integrando
t2
t2
t1
t1
2
2
2
∫ i (t )dt =I ef ∫ dt = I ef (t2 − t1 )
Despejando Ief
Sistemas y señales
29
I ef2 =
1 t2 2
∫ i (t )dt
t 2 − t 1 t1
1 t2 2
∫ i (t )dt
t 2 − t 1 t1
I ef = I RMS =
Ejemplo
Calcular el valor eficaz de la señal sinusoidal de la Fig. 1.34.
Fef = FRMS =
1
2π
2π
∫ (A sen(ωt )) dωt
2
0
A
2π
Fef =
2π
cos(2ωt )
A 2π 1
dωt
∫ dωt − ∫
2π 0 2
2
0
Fef =
A 2π
− 0
2π 2
2π
∫ sen
2
(ωt )dωt =
0
A
2π
{1 − cos(2ωt )}dωt
Fef =
2π
∫
0
2
Finalmente
Fef =
A
2
Observe que es independiente del periodo de la señal. Luego, una señal sinusoidal cuyo
valor efectivo es el calculado, produce el mismo efecto calorífico que una señal constante de valor
Fef = A
2.
Tarea
Considere la señal f (t ) = A sen(ωt + φ ) y f (t ) = A cos(ωt + φ ) determine el valor eficaz.
30
Teoría de Redes I