Tensores 1. Rotación de ejes cartesianos 2. Rotación en el plano
Anuncio

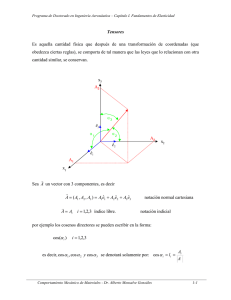
Tensores 1. Rotación de ejes cartesianos Cuando se realiza una rotación de los ejes, los vectores deben conservar su módulo, dirección y sentido. Por ello, deben transformase de acuerdo con la ley x0j = cij xi , (1) donde xi y x0j denotan las coordenadas del vector antes y después de realizar el giro, respectivamente, y cij es el coseno del ángulo que forma el eje OXi con el eje OXj0 . Se utiliza el convenio de suma sobre ı́ndices repetidos. Si denotamos por C̃ la matrix cuyas componentes son cij , podemos reescribir la ecuación (1) en forma más compacta ~x = C̃ · ~x0 ~x0 = C̃ t · ~x, (2) y por tanto C̃ t = C̃ −1 ⇒ cik cjk = δij . (3) 2. Rotación en el plano Como ejemplo vamos a ver qué sucede cuando se realiza una rotación en el plano. Consideremos el punto P con coordenadas (x1 , x2 ) antes de la rotación y coordenadas (x01 , x02 ) tras la rotación. d = OC d + AB d = x1 cos α11 + Del dibujo se desprende que x01 = OD x2 sen α11 . Por definición c11 = cos α11 y c21 = cos α21 = cos(π/2 − α11 ) = sen α11 , de manera que se cumple que x01 = c11 x1 + c21 x2 . Análogamente, d d d = x2 cos α11 − x1 sen α11 = x2 cos α11 − x1 sen (α12 − x02 = P D=P B − DB π/2) = x2 cos α11 + x1 cos α12 = c22 x2 + c12 x1 . En definitiva, hemos comprobado que en este caso se verifica la ecuación (1). 1 3. Leyes de transformación Esto nos lleva a una definición alternativa de vector como un conjunto de 3 componentes que se transforman de acuerdo con la ley ~x0 = C̃ t · ~x (4) bajo rotación de los ejes de coordenadas. Un tensor de segundo orden es un conjunto de 9 componentes Tij que se transforman de acuerdo con la ley 0 Tmn = cim cjn Tij = ctmi Tij cjn (5) bajo rotación de los ejes de coordenadas. En forma más compacta pordemos reescribir esta ley de transformación como T̃ 0 = C̃ t · T̃ · C̃. (6) 4. Contracción del tensor La contracción del tensor no es más que su traza, esto es Tii = Tr(T̃ ) = T11 + T22 + T33 . (7) Es fácil demostrar que es invariante bajo rotaciones de los ejes de coorde0 nadas. En efecto, utilizando la ecuación (6) podemos escribir que Tmm = t t Tr(T̃ ) = Tr(C̃ · T̃ · C̃) = Tr(C̃ · C̃ · T̃ ) = Tr(T̃ ) = Tii . 5. Delta de Kronecker La delta de Kronecker es un tensor de segundo orden cuyas componentes son las siguientes 1, i = j, δij = (8) 0, i 6= j. Se dice que es un tensor isótropo porque sus componentes no cambian bajo 0 rotaciones de los ejes de coordenadas. Esto es sencillo de demostrar: δmn = cim cjn δij = cim cin = δmn . 6. Tensor completamente antisimétrico Es un tensor de tercer orden isótropo cuyas componentes son ijk = 123, 231, 312, 1, 0, dos ı́ndices son iguales, εijk = −1, ijk = 321, 213, 132, 2 (9) y verifica que εijk εklm = δil δjm −δim δjl . El producto vectorial de dos vectores se puede expresar mediante este tensor como (~u × ~v )k = εijk ui vj = εkij ui vj (10) 7. Operador Nabla En coordeadas cartesianas se define como ∇ ≡ ebi ∂ , donde ebi es el vector ∂xi unitario a lo largo del eje OXi . Algunas deficiones que involucran a este operador son • Gradiente de un escalar: (∇φ)i = ∂φ ∂xi • Divergencia de un vector: ∇ · ~v = ∂vi ∂xi • Divergencia de un tensor: (∇T̃ )i = ∂Tij ∂xj • Rotacional de un vector: (∇ × ~v )i = εijk ∂vk ∂xj Si ∇·~u = 0 se dice que el campo ~v es solenoidal y si ocurre que ∇×~v = ~0 se dice entonces que es irrotacional. 8. Otros resultados Todo tensor de segundo orden se puede descomponer en la suma de un tensor simétrico y otro antisimétrico. La demostración es sencilla puesto que Tij = (1/2)(Tij + Tji ) + (1/2)(Tij − Tji ) ≡ Sij + Aij . Es claro que Sij = Sji , por lo que es simétrico, y que Aij = −Aji , por lo que es antisimétrico. 3