2.4 Control de paso. Análisis de errores y convergencia. A
Anuncio

Apuntes de J. Lorente
2.4
9
Control de paso. Análisis de errores y convergencia.
A-estabilidad.
En esta sección analizamos el modo en que podemos obtener una estimación del error de truncatura
local que permita modificar el tamaño de paso según la precisión que deseemos. También damos
un análisis de la convergencia dando estimaciones tanto del error local como del error global del
método. Terminaremos la sección con el estudio del comportamiento de los métodos de un paso
frente a problemas ”rı́gidos”.
2.4.1
Control de paso.
Supongamos que el método usado es de orden p > 1 y el término principal de error local de truncatura
(h)
(2h)
es Chp+1 y sean yn+1 ≈ y(x = xn+1 ) e yn+1 ≈ y(x) sendas aproximaciones obtenidas, respectivamente,
h
desde yn−1
e yn2h ; entonces,
)
(h)
p+1
y(x) − yn+1 = 2Ch
(h)
(2h)
⇒ yn+1 − yn+1 = 2(1 − 2p )Chp+1 ⇒
(2h)
p+1
p+1
p+1
y(x) − yn+1 = C (2h)
= 2 Ch
(h)
⇒ Rn+1 (x; h) ≈
(2h)
yn+1 −yn+1
2(1−2p )
(h)
(2h)
Ası́, es posible conocer el error de truncatura local mediante los valores yn+1 y yn+1 para poder decidir
si podemos aumentar el tamaño de paso o disminuirlo, a lo largo del proceso de aplicación práctica
del método (dependiendo de la menor o mayor oscilación de la solución del P.V.I.).
Otra forma de llevar a cabo el control de paso es usar métodos de distinto orden en el proceso
consiguiendo estimar el error de truncatura local y ası́ poder decidir si se aumenta o disminuye
el paso. Esta técnica se suele atribuir a Fehlberg (ver capı́tulo 8 del Kincaid-Cheney (referencia
bibliográfica 5)).
2.4.2
Errores y convergencia.
Teorema 2.1
y
= µ
Dado un método para el P.V.I. (2.1) del tipo 0
; entonces,
yn+1 = yn + hΦ (xn ; yn ; h, f ) n ≥ 0
1. Si Φ(x, y; h, f ) es Lipschitziana respecto de ”y”; entonces, el método es convergente si, y sólo
si, es consistente.
2. Si el método es de orden p ≥ 1; entonces, el error global de discretización es O(hp ). Más
concretamente,
eM (x−a) − 1
|y(x) − yn | ≤ Chp
M
donde M es la cte. de Lipschitz de Φ (h suficientemente pequeño).
3. Si se tienen en consideración los errores debidos al redondeo, entonces se tiene:
δ eM (x−a) − 1
p
|y(x) − ỹn | ≤ Ch +
h
M
10
Métodos de un paso.
Teorema 2.2 (convergencia de métodos clásicos)
Si f (x, y) es Lipschitziana respecto de ”y”; entonces,
1. Los métodos de Runge-Kutta explı́citos de orden p ≥ 1 son convergentes.
2. Si las funciones f (k) (x, y) son lipschitzianas para k = 1, 2, . . . , p − 1, el método de Taylor de
orden p es convergente.
3. Los métodos de Euler son convergentes.
2.4.3
A-estabilidad o estabilidad numérica.
A la hora de elegir un método para resolver numéricamente un p.v.i. no sólo hemos de tener en
cuenta sus propiedades de convergencia y orden sino también cúal serı́a su comportamientos frente
a dos situaciones diferentes que conducen a un mismo criterio o concepto; a saber,
• ¿cómo se comporta el método frente a errores de redondeo si mantenemos h fijo y hacemos el
intervalo de integración suficientemente grande (es decir, n− > ∞)?
• ¿qué ocurre si resolvemos numéricamente un problema cuya solución tiene una parte que tiende
a cero rápidamente (transitoria) y otra que permanece (estacionaria) cuando x → ∞? El caso
más simple es el p.v.i. y 0 = λy con y(0) = µ y Re(λ) < 0 cuya solución es y(x) = µeλx .
Definición 2.1
Diremos que un método de un paso,
yn+1 = yn + hΦ(xn , yn , yn+1 ; h, f )
es A-estable si al aplicarlo al p.v.i. test: y 0 = λy con Re(λ) < 0, la solución numérica {yn } cumple:
lim yn = 0 ∀h > 0
n→∞
Veamos algunos ejemplos,
• Si aplicamos el método de Euler al problema test tendremos.
yn+1 = yn + hλyn = (1 + λh)yn = · · · = (1 + λh)n+1 y0
luego la solución numérica tiende a cero si, y sólo si, el factor 1 + w (con w = λh) cumple:
|1 + w| < 1
Los valores de w que cumplen esa desigualdad son los del cı́rculo de centro en (−1, 0) y radio
1 (fig. ) . Luego, el método de Euler no es A-estable.
• ¿qué ocurre con el método de Euler implı́cito?
Ahora, al aplicarlo al problema test, tendremos:
yn+1 = yn + hλyn+1 ⇒ yn+1
1
=
yn = · · · =
1 − λh
1
1 − λh
n+1
y0
Apuntes de J. Lorente
11
luego la solución numérica tiende a cero si, y sólo si, el factor
1 1 − w < 1
1
1−w
(con w = λh) cumple:
condición que es cierta para cualquier valor w con Re(w) < 0 y por lo tanto para cualquier
valor h > 0. Por lo tanto, el método es A-estable.
En general, cuando aplicamos un método de un paso la solución numérica adoptará la forma:
yn+1 = Q(w)yn
donde Q(w) es de tipo polinómico en el caso de métodos explı́citos y de tipo racional en los métodos
implı́citos. Ası́, la condición de A-estabilidad de un método pasa por analizar la desigualdad:
|Q(w)| < 1
(2.12)
con w ∈ C.
Dado que la condicón de A-estabilidad es muy fuerte, en ocasiones buscaremos métodos para los
que el conjunto solución de (2.12) sea lo mayor posible. Ası́, definimos los conceptos de región e
intervalo de A-estabilidad como sigue:
Al conjunto, RA = {w ∈ C/|Q(w)| < 1} lo llamamos región de A-estabilidad del método; e
intervalo de A-estabilidad al conjunto: RA ∩ R−
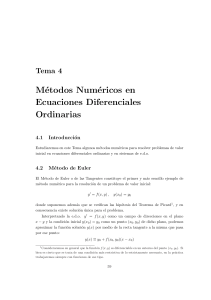
Observación. Un método es A-estable si su región de A-estabilidad contiene el semiplano
izquierdo de R2 .
En las figuras siguientes se muestran las regiones para Euler y Euler implı́cito.
-3
-2.5
-2
-1.5
-1
1.5
1.5
1
1
0.5
0.5
-0.5
-2
-1
1
-0.5
-0.5
-1
-1
-1.5
-1.5
2
Figura 2.1: Regiones de A-estabilidad para los métodos de Euler explı́cito e implı́cito.