Documento 496943
Anuncio

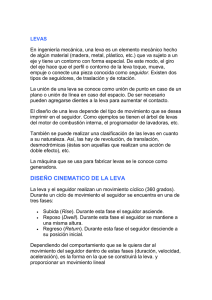
y Detención Subida Detención Retorno Elevación 0 360° Diagrama de desplazamientos. y 3/2 y L3 5 L2 Elevación 4 3 L1 2 1 L1 1/2 1 1 2 2 3 3 4 5 1 (b) (a) Movimiento parabólico: a) entrecaras con movimiento uniforme, y b) construcción gráfica del diagrama de desplazamientos. y 6 5 4 3 L1 2 1 1 2 3 4 5 6 Movimiento armónico simple. y 4 Cicloide 5 6 0,6 3 5 1 2 r=L/2 4 3 L 2 1 P 0 1 O 0 1 2 3 4 5 6 Movimiento cicloidal. 2.3 Leyes de movimiento de los seguidores de levas. 2.3.1. Presentación del ciclo de una leva. 1 - Un mecanismo de leva, por lo común, tiene un grado de libertad. - Un elemento es impulsado por un movimiento de entrada (t) conocido, casi siempre, un eje girando a velocidad constante. - La salida es un movimiento determinado (y) deseado para el seguidor. - Este movimiento de salida (y) se representa en lo que se conoce como Diagrama de desplazamientos. y detención seguidor elevación subida bajada 1 ciclo = 2 rad = 360° = 1 rev (leva) detención (t) y. Puede representar tanto una distancia de traslación, para un seguidor de movimiento alternativo, como un ángulo, para un seguidor de movimiento oscilante. - Lo anterior quiere decir que durante un ciclo (una revolución) de la leva a velocidad constante, el seguidor puede ejecutar una serie de eventos (movimientos) requeridos de acuerdo a una ley de movimiento determinada. 2.3.2 Ecuaciones de movimiento para los seguidores. - Una vez elegida la relación exacta entre la entrada (t) y la salida (y) el diagrama de desplazamientos se construye de acuerdo a una ecuación de movimiento conocida MOVIMIENTO UNIFORME (M..U) 2 x x´ x ´´ t t x vt v t x cte t a0 v v0 v promedio MOVIMIENTO UNIFORMEMENTE ACELERADO (0 DESACERLERADO) MVA. x x x ´ t t 1 x v0 t at 2 2 x ´ v0 at si v f v0 2 x 2a 2 v0 0 x ´ at x´ t si v0 0 x ´´ x ´´ 2x t2 vf 2 2x 2x t 3 El movimiento uniforme no es recomendable cuando comienza a terminar ya sea una subida o una bajada del seguidor sobre todo para levas de mayor velocidad Perfil corregido MVA Perfil no recomend ado 1 revolución Lo anterior quiere decir que es recomendable construir el perfil de la leva con la ley de MVA o MVD (desacelerado, el movimiento parabólico de dicha ley proporciona al seguidor aceleraciones o desaceleraciones constantes. Ejemplo de un segmento de perfil recomendable: Y L3 L2 L1 B1 B2 B3 B1 (t ) = MV acelerado B2 = MV B3 =MV desacelerado 4 A 2 3 2 2 x 1ciclo 3600 Los puntos de la posición del seguidor para cualquier instante pueden ser encontrados analíticamente por medio de las siguientes ecuaciones: x A senwt x´ WA coswt x´´ -w2 senwt Recordatorio 5 1 ciclo= PERIODO T Periodo (T) .- Tiempo para completar un ciclo. 1 Frecuencia (f).- ( f ) : Número de ciclos /seg. T *Un sistema armónico se puede caracterizar por su frecuencia angular w= f (T ,f ) w 2f 2 T t .- Angulo de fase. w.- Frecuencia angular de oscilación. f .- Frecuencia de oscilación. T.- Periodo de la oscilación. 2 t T * wt 2f t * Si t =T 2 rad 1 revolución 6 wt para el movimiento angular x vt para el movimiento rectilíneo Nota.- Para el MAS la aceleración NO es constante : Parámetro Posición Valor Velocidad , 2 Máximo Aceleración 2 Velocidad Aceleración 2 , 3 2 Máximo , 3 2 Cero , 2 Cero Se puede demostrar que la dirección de la aceleración siempre está dirigida hacia el centro, para cuando se trata de un péndulo de movimiento armónico. Ejemplo: Un movimiento armónico tiene una amplitud de 0,2 cms y un periodo de 0,15 seg. Hallar: 7 -La máxima velocidad y aceleración. T = 2 =0,15 seg. -De acuerdo a las premisas anteriores la velocidad máxima estar dad en ó 2. x wA coswt wA cos x wA cos wA 0,2w 2 2 rad pero w 41,88 T 0,15 seg cm x max 0,241,88 8,37 seg -La máxima aceleración estará en ó 2 3 2 x w Asenwt w Asen 2 2 x w Asen 2 2 w A 2 x w 0,2 2 x max 350 41,88 0,2 2 cm seg 2 Problema : Un acelerómetro indica que una estructura está vibrando armónicamente a 82 ciclos / seg con una aceleración máxima de 50 g´s. Hallar la máxima amplitud de la vibración. f= 82 Hz 8 g = 50 g´s g 9,81 m s 2 50gs 490,5 m s 2 De la ecuación que nos da la aceleración: x w Asenwt w Asen 2 -La máxima amplitud se halla en 2 ó 2 3 2 Amax * Tambien la aceleracion maxima Amax 490,5 w Asen 2 2 w A 2 Si 9 w 2f 2 82 515,2 A 490,5 515,2 2 rad seg 0,0018m ts A 1,8m m 2.3.3 Métodos Gráficos. Ejemplo: Se requiere trazar una leva simétrica con una ley de movimiento armónico simple (MAS), considerando un seguidor de punta. Trazar un círculo e5f, donde ef , junto con los ejes de coordenadas. Como el MAS se puede representar sobre un diagrama de desplazamiento, entonces: 10 f y 10 9 8 7 6 2A 9 8 7 6 5 5 4 3 2 1 4 3 2 1 0 1 2 3 4 5 6 7 8 9 e 0 10 θt Dividiendo la línea de las abscisas t en partes iguales en la correspondiente en la correspondiente a un medio ciclo (10 por ejemplo). Dividiendo un medio círculo (semicircular) en el mismo número de partes, correspondientes al círculo (desde 1 hasta 10). A través de estas partes marcadas trazar líneas horizontales. Trazar líneas verticales en los puntos marcados en el eje de abscisas. Haciendo corresponder cada uno de los puntos marcados anteriormente. 10 1 con 1 a 2 con 2 b 3 con 3 c 4 con 4 d ... etc ... j b a c 0 d e f g h j i La curva trazada por estos puntos desde (a hasta j) será el perfil de la leva, suponiendo que dicho perfil es simétrico, es decir que la otra mitad será similar. En el punto e (mitad) la velocidad es máxima y la aceleración vale cero (0). En los puntos 0 y j la velocidad vale 0 y la aceleración es máxima siempre dirigida hacia el centro. Movimiento Cicloidal Para un Seguidor de Leva. El nombre se deriva de la curva llamada cicloide. 11 En la siguiente figura se muestra una curva que tiene como ecuaciones paramétricas: x g t y y f t dondea t b La pendiente de la curva de la figura, en un punto particular, está dada por: m dy f t dx g t t z4 y B gb , f b t z2 f(b) – f(a) t z3 A ga, f a t z1 g(b) – g(a) x La pendiente del segmento rectilíneo a través de los puntos Ag a , f a y Bg b, f b está dada por: f b f a g b g a El teorema de Cauchy del valor medio afirma que las pendientes son iguales al menos en un valor de t entre a y b, para la curva mostrada hay cuatro valores t z1, t z2 , t z3 , t z4 que satisfacen la conclusión del teorema. La curva tratada “la cicloide” puede definirse por ecuaciones paramétricas. La cicloide es una curva trazada por un punto en la longitud de una circunferencia cuando esta rueda (sin deslizarse) a lo largo de una línea recta. Suponiendo una circunferencia de radio a. y 12 a t P A T la cualx rueda la circunferencia. Sea el eje X la línea recta fija sobre El punto de partida es considerado cuando el punto P tiene contacto con el eje X, coincidiendo con el origen (O) del plano cartesiano. Analizando la figura una vez que la circunferencia ha rodado un ángulo de t radianes (vectorialmente). V OT V TA V AP V OP V OT longitud del arco PT at 1 Como en la dirección de V OT está a lo largo del eje X positivo V OT ati 2 También V TA a a cost Y como la dirección de V TA es la misma que la dirección de j, se tiene: V (TA) = a (l – cos t) j (3) ║V (AP)║ = a sen t siendo la dirección de V (AP) la misma que – i V (AP) = - a sen ti (4) Sustituyendo 2, 3,y 4 en 1 se tiene: ati + a (1- cos t) j – a sen ti = V (OP) (5) La ecuación (5) es una ecuación vectorial de la cicloide x = a (t – sen t) y y = a (1- cos t) Dónde t es cualquier número real. Se muestra una porción de ésta gráfica: 13 La construcción de un perfil con una ley de movimiento cicloidal se traza de la siguiente manera. Trazar los ejes del diagrama de desplazamiento. Trazar un círculo de radio L/2 en donde L es la elevación total, con centro coincidiendo con el eje de las equis y el punto de partida P coincidiendo con el origen 0. Dibujando las posiciones representativas de la circunferencia al completar con una revolución rodando sin deslizarse (a velocidad constante) sobre el eje de las ordenadas, desde 0 hasta L. 14