2.2. Parametrización de superficies explicitas e implícitas.
Anuncio

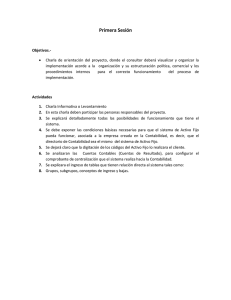
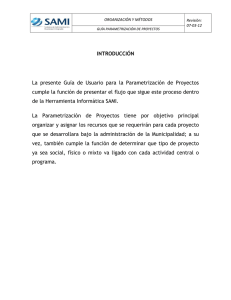
2.2. Parametrización de superficies explicitas e implícitas. Las superficies S pueden estar dadas también de manera explicita o implicita en ℜ3 . Cuando una superficie está dada de manera que un conjunto de puntos ( x, y , z ) satisfacen la ecuación F ( x, y, z ) = 0 , se dice que la superficie está representada en forma implícita. Si de esta ecuación podemos despejar una de las variables en función de las otras dos, por ejemplo, z = f ( x, y ) , entonces se dice que la superficie esta dada en forma explicita. Para realizar la parametrización de una superficie que esté dada de manera explicita de las formas x = f ( y, z ) , y = f ( x, z ) ó z = f ( x, y ) , se puede utilizar como referencia la expresión genérica que se presentan en la Tabla 2. Tabla 2. Parametrización de una Superficie dada de forma explicita. Superficie Explicita S z = f ( x, y ) Parametrización de la Superficie S u x g : ℜ → ℜ / g ( u , v ) = v = y , f ( u, v ) z 2 3 con a ≤ u ≤ b y c ≤ v ≤ d Fuente: Propia. Para las superficies dadas de manera implícita se puede recurrir a la representación de este tipo de superficies en coordenadas cilíndricas, coordenadas esféricas, u otro tipo de parametrización conveniente; algunas de las parametrizaciones más utilizadas se muestran en la Tabla 3, aunque cabe señalar que no es la única parametrización que se puede realizar de las superficies a las cuales se hace referencia. Tabla 3. Parametrización de Superficies dadas de Forma Implícita. Cono z 2 = x2 + y2 r cos (θ ) x g : ℜ2 → ℜ3 / g ( r ,θ ) = rsen (θ ) = y , con r z r1 (θ ) ≤ r ≤ r2 (θ ) y 0 ≤ θ ≤ 2π asen (θ ) x g : ℜ → ℜ / g ( z ,θ ) = a cos (θ ) = y , con z z 2 Cilindro x2 + y 2 = a2 3 0 ≤ θ ≤ 2π y z1 ≤ z ≤ z2 Tabla 3. (Continuación) a s en (ϕ ) cos (θ ) x g : ℜ → ℜ / g (θ , ϕ ) = a s en (ϕ ) sen (θ ) = y , z a cos (ϕ ) 2 Esfera x2 + y 2 + z 2 = a2 3 con 0 ≤ θ ≤ 2π y 0 ≤ ϕ ≤ π Fuente: Propia. EJEMPLO 46. Realice la parametrización de la superficie dada por el paraboloide z = 5 − x 2 − y 2 que se encuentra por arriba del plano xy. Solución. Se tiene aquí una superficie dada en forma explicita de la forma z = f ( x, y ) , por lo tanto una parametrización conveniente para esta superficie viene dada por la función g : ℜ2 → ℜ3 / g ( u, v ) = ( u, v,5 − u 2 − v 2 ) = ( x, y, z ) Figura 48. Paraboloide del Ejemplo 46. EJEMPLO 47. Parametrizar la superficie definida por el cilindro x 2 + z 2 = 4 , entre plano x + y = 1 , y el plano xz. Solución. La superficie que se desea parametrizar es la poción de la superficie del cilindro x 2 + z 2 = 4 que se encuentra entre el plano x + y = 1 denotado por S2 , y el plano xy identificada como S3 . Una parametrización para la superficie del cilindro S1 está dada al emplear las coordenadas cilíndricas definiendo la función 2 sen (θ ) x g1 : ℜ → ℜ / g1 ( y,θ ) = 2 cos (θ ) = z , como la parametrización de esta superficie y y 2 3 en donde 0 ≤ θ ≤ 2π , y 0 ≤ y ≤ 1 − 2 sen (θ ) , debido a que el cilindro está acotado por el plano y = 1 − x y el plano xz, y = 0 Figura 49. Superficie del Ejemplo 47. EJERCICIO PROPUESTOS 2.2. Realice una parametrización para las superficies que se presentan a continuación: 1) El cilindro z 2 + y 2 = 9 , entre los planos x = −2 y x = 3 . 2) El paraboloide 9 − 2 z 2 − 3 x 2 = y , que se encuentra para y ≥ 0 . 3) El cono truncado x 2 + y 2 = z 2 , entre los planos x = −2 y x = 3 . 4) El hemisferio z = − 4 − x 2 − y 2 .