Cartel del proyecto
Anuncio

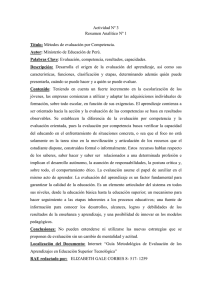
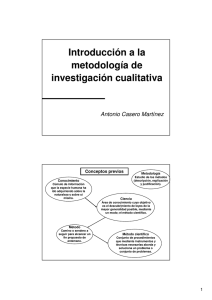
INVESTIGADOR PRINCIPAL: PEDRO JAVIER NAVARRO LORENTE TÍTULO DEL PROYECTO: ViSel-TR: “TÉCNICAS DE VISIÓN SELECTIVA EN ENTORNOS NO ESTRUCTURADOS PARA APLICACIONES CON RESTRICCIONES DE TIEMPO REAL”. RESUMEN: La complejidad que presenta la tarea de procesamiento de información visual en entornos no estructurados impide el desarrollo de Sistemas de Visión (SV) con prestaciones suficientes para integrarse en Sistemas de Control en Tiempo Real (vehículos autónomos, robots móviles,…). El presente proyecto se enmarca dentro de las líneas de actuación propiciadas por la acción INNPLANTA’2011 (INP2011-0022-PCT-430000-ACT9) para la “adquisición de equipamiento científico-tecnológico para el Laboratorio de Investigación en Sistemas para Vehículos (SiVeLab)” y propone un enfoque novedoso para el desarrollo de este tipo de sistemas que busca dos objetivos fundamentales: (1) interpretación eficiente y con tiempo de respuesta razonable de un entorno no estructurado y (2) uso de técnicas de diseño software que permitan la integración de los SV en Sistemas de Tiempo Real (STR). El proyecto ViSel-TR propone un nuevo enfoque para el desarrollo de SV en entornos no estructurados, en el que se definen escenarios esperados donde el SV puede encontrarse. La elección de uno u otro escenarios dependerá de una serie de variables (locales al SV y globales del entorno), independientes de la información visual captura por el SV. Para ello se usará como elemento inicial de trabajo el planteamiento que se muestra en la Fig. 1 basado en el sistema humano de procesado de información. Figura 1. Sistema de información humano. En esta línea habrá que determinar y catalogar qué variables locales y globales extraídas del entorno no estructurado resultan discriminantes a la hora de reducir la cantidad de información visual a procesar. Por ejemplo, un vehículo circulando por una autopista con un sistema de reconocimiento del estado de la vía (Fig. 2) captará información diferente en función de la localización de la cámara dentro del vehículo. Una cámara localizada en la parte derecha permitirá la detección de señales, vehículos en el arcén, salidas de vía, guarda raíles, etc. pero una cámara situada en la parte central-izquierda será capaz de detectar señales, y vehículos, pero no de detectar vías de salida, debido a la ausencia de las mismas. La posición relativa de los elementos sensoriales limita la información visual que recibirá el SV y es una variable local a tener en cuenta a la hora de filtrar la información que debe procesar el sistema. De igual forma variables globales como la posición geográfica, la situación meteorológica, horario (día-noche) son grandes discriminantes de información que obligan en la actualidad a desarrollar SV diferentes, en cuanto a que deben procesar información visual distinta. Esta variabilidad en las condiciones iniciales del problema obliga a los desarrolladores de sistemas de visión a utilizar técnicas de segmentación de imágenes diferentes en función de cada aplicación. Figura 2. Modelo propuesto para el procesamiento selectivo de información visual.