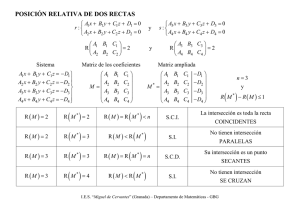
POSICIÓN RELATIVA DE DOS PLANOS
π1 : A1 x B1 y C1 z D1 0
π 2 : A2 x B2 y C2 z D2 0
y
Sistema
Matriz de los coeficientes
Matriz ampliada
A1 x B1 y C1 z D1
A2 x B2 y C2 z D2
A B C
M 1 1 1
A2 B2 C2
A B C D1
M 1 1 1
A2 B2 C2 D2
*
n3
R M * R M 1
Como n 3 , R M 2 y R M * 2 , el sistema no puede ser un S.C.D., será un S.C.I. o un S.I.
R M 1 y R M * 1
R M R M * n S.C.I.
R M 1 y R M * 2
R M R M * S.I.
R M 2 y R M * 2
R M R M * n S.C.I.
La intersección es todo el plano
COINCIDENTES
No tienen puntos en común
PARALELOS
La intersección es una recta
SECANTES
I.E.S. “Miguel de Cervantes” (Granada) – Departamento de Matemáticas - GBG
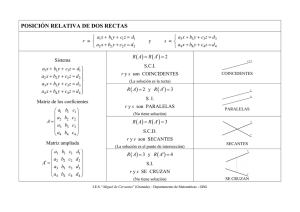
POSICIÓN RELATIVA DE DOS PLANOS
π1 : A1 x B1 y C1 z D1 0
y
π 2 : A2 x B2 y C2 z D2 0
π1 : A1 x B1 y C1 z D1 0
π 2 : A2 x B2 y C2 z D2 0
A1 B1 C1 D1
A2 B2 C2 D2
La intersección es todo el plano
A1 B1 C1 D1
A2 B2 C2 D2
No tienen puntos en común
A1 B1
A
C
B
C
o 1 1 o 1 1
A2 B2
A2 C2
B2 C2
La intersección es una recta
COINCIDENTES
PARALELOS
SECANTES
I.E.S. “Miguel de Cervantes” (Granada) – Departamento de Matemáticas - GBG
 0
0