Práctica 3. Efectos y limitaciones de la retroacción
Asignatura: Sistemas Electrónicos de Control
Curso:
2013/2014-1
Realización: D4-005, 5/4/13 (g19) y 8/4/13 (g12), 18h-20h
Nota: Para la realización de la práctica es imprescindible traer el estudio previo hecho
individualmente. El estudio previo consiste en resolver los apartados marcados con el símbolo
y se recogerá a final de la sesión.
1. Introducción. Case Study
El amplificador de audio es un dispositivo electrónico cuya entrada es una señal de baja
potencia (por ejemplo, la generada por un tocadiscos) y cuya salida tiene suficiente potencia
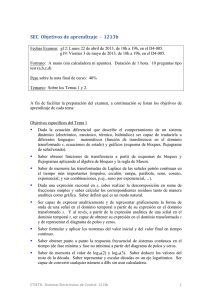
para activar (drive) un altavoz. Dicho amplificador consiste, en general, en un amplificador
diferencial cuya salida, debidamente atenuada, es retroalimentada al terminal negativo de la
entrada (ver Figura 1a). Si suponemos que la impedancia de entrada es infinita y la de salida es
nula, su esquema funcional es el de la Figura 1b.
v1
+
v2
R1
E
V1 = R +
A0(s)
W
+
+
V2 = Y
R2
R1 R2
R2
(a)
(b)
Figura 1
La etapa de potencia A0 (el amplificador en lazo abierto -open) es fácil de montar pero el
resultado no es un dispositivo con función de transferencia A0 k , de valor claramente
determinado. En realidad este valor puede ser muy diferente del valor esperado (valor nominal)
puesto que se ve afectado por las tolerancias de fabricación (incertidumbre), las condiciones
ambientales (perturbaciones), la magnitud de la señal (saturación) y la frecuencia (ancho de
banda limitado). Se trata de comprobar que la retroacción permite superar dichas deficiencias.
2. Ejercicios
Ejercicio 1. Efectos de la retroacción. Indicar cuáles son las razones para usar retroacción.
ETSETB. Sistemas Electrónicos de Control 1314a
1
Práctica 3. Efectos y limitaciones de la retroacción
Parte I. Modificación de la dinámica nominal
Ejercicio 2. Aumento de la banda pasante.
Datos: G ( s) A0 ( s )
R2
10 4
, H
1.
R1 R2
1 s 0.01
Se pide:
Estudio Previo:
1) Representar el diagrama de Bode de A0(s). Estimar su ancho de banda b.
2) Representar el diagrama de Bode de M(s) = Ac(s). Estimar su b.
3) Superponer ambos diagramas de Bode y comentar el resultado. En concreto indicar cuánto
vale el producto ganancia en continua ancho de banda.
4) Opcional. Dibujar, en el plano complejo, la evolución del polo de Ac(s) al variar el factor k
(que nominalmente es 104) de 0 a .
Simulación (MATLAB):
Comprobar los resultados del estudio previo.
Funciones: bode, feedback, rlocus
Parte II. Reducción de la incertidumbre
Ejercicio 3. Robustez frente a variaciones (perturbación) de la planta. Se trata de
estudiar los cambios que experimenta la amplificación en continua.
Datos: G ( s) A0 ( s )
R2
10 4
, H
0.01 .
1 s 0.01
R1 R 2
Se pide:
1) Calcular M ( s ) Ac ( s )
V2 ( s)
. ¿Cuanto vale Ac(0)?
V1 ( s )
2) Calcular Ac(0) si A0 (0) varía y toma el valor de 2104.
3) Con el valor nominal A0 (0) 10 4 , suponer que H varía de 0.01 a 0.02. Calcular Ac(0) y
comparar el resultado con el del apartado anterior.
4) Extraer conclusiones en cuanto a la robustez (insensibilidad) de Ac frente a variaciones de la
cadena directa y frente a variaciones de la cadena retroactiva.
Ejercicio 4. Rechazo de las perturbaciones.
R2
10 4
Datos: G ( s ) A0 ( s )
, H
10 3 . El ruido electrónico generado en
R1 R 2
1 s 0.01
el amplificador se modela mediante la señal aditiva w(t) (ver Figura (b)).
Se pide:
Estudio Previo:
1) Calcular Yw(s) debido a la perturbación W(s). Comprobar que la función de transferencia
Y w ( j )
es precisamente la función de sensibilidad S ( j ) de Bode.
W ( j )
ETSETB. Sistemas Electrónicos de Control 1314a
2
Práctica 3. Efectos y limitaciones de la retroacción
2) Dibujar el diagrama de Bode de S ( j ) y sacar conclusiones sobre el rechazo de las
perturbaciones a frecuencia 0. ¿Qué pasaría con A0 (0) y S ( j ) si el lazo presentara un
integrador?
Simulación (MATLAB):
1)
Comprobar los resultados del estudio previo (feedback, bode).
2)
Representar (step) la salida yw(t) cuando w(t) es una perturbación tipo escalón unitario.
3)
Si w(t ) 2 sin(10t ) , calcular a partir del Bode (bode) de S ( j ) la expresión de la
respuesta forzada permanente y w (t ) (indicar claramente el valor de la atenuación y el
desfase). Ídem para w(t ) 2 sin(10 4 t ) .
4)
Superponer (linspace, sin, lsim, plot), en una misma gráfica, 4 periodos de la señal
perturbadora w(t ) sen(t ) con la correspondiente respuesta yw(t), para 10, 10 4 .
Determinar en cada caso la atenuación y el desfase y relacionar el resultado con el
diagrama de Bode de | S ( j ) |.
Ejercicio 5. Mejora de la linealidad.
Datos: Se incluye un preamplificador de error con u (t ) 100e(t ) , R1 0 , R 2 , y se
supone que el amplificador de potencia A0 es no lineal con característica: v 2 (t ) u(t ) u 3 (t ) .
Se pide:
Estudio Previo:
1) Lazo abierto: Efecto de A0 no lineal (generación de armónicos): Suponiendo que
u(t ) Asin(t ) , ¿qué frecuencias contendrá la señal v2(t)?
2) Lazo cerrado: Representar a mano el esquema de bloques del servo (¡ojo! no es lineal.
Simulación (SIMULINK):
1) Lazo abierto: Excitar con una señal sinusoidal de frecuencia unidad y amplitud dos el bloque
no lineal A0. Representar la señal a la entrada u(t) y la señal a la salida v2(t) de dicho bloque.
Comprobar la aparición de armónicos.
2) Lazo cerrado. Linealización en torno al origen. Construir el esquema de bloques del sistema
en lazo cerrado. Simular y representar simultáneamente las señales r(t), u(t) y v2(t) en los
casos en que r(t) sea una sinusoide y un diente de sierra. Tomar frecuencia unidad y
amplitud dos en ambos casos. Comentar el resultado en cuanto a la validez de la
linealización.
ETSETB. Sistemas Electrónicos de Control 1314a
3
 0
0