Regulación y Control de Máquinas Navales Práctica 4: empleando Matlab
Anuncio

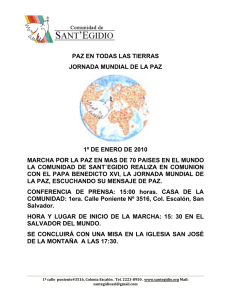
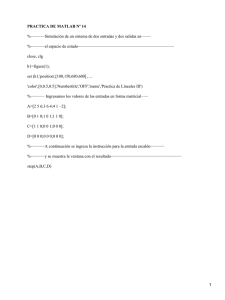
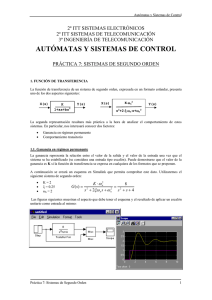
Regulación y Control de Máquinas Navales Práctica 4: Análisis temporal de sistemas en cadena abierta empleando Matlab Apellidos Fecha de entrega Nombre Curso 2007-2008 I INTRODUCCIÓN La práctica descrita en este documento pretende familiarizar al alumno con los conceptos estudiados en el Tema 3 del Módulo 2 de la asignatura. Al igual que en la práctica previa, para usar las funciones aquí mencionadas se necesita Matlab® con el paquete de Control de Sistemas (Control System Toolbox). II CARACTERIZACIÓN DE UN SISTEMA POR SU MAPA DE CEROS Y POLOS Definir los siguientes sistemas utilizando el comando: G=tf(num,den) donde G será la variable que contendrá el objeto “sistema” (que además se mostrará por pantalla al realizar la asignación), y num y den son respectivamente los polinomios del numerador y del denominador de la función de transferencia en el formato de representación de polinomios de Matlab®. G1( s ) 2 4 y G 2( s ) 2 0.5s 1 s 4s 4 Representar el mapa de polos y ceros de ambos sistemas utilizando el comando pzmap(G) III CARACTERIZACIÓN DE UN SISTEMA MEDIANTE LA FUNCIÓN DE TRANSFERENCIA En los sistemas creados en el apartado anterior identificar los parámetros que definen su función de transferencia. Para ello, comparar las ecuaciones de G1 y G2 con las expresiones generales de un sistema de primer y segundo orden, según se muestra en las siguientes expresiones: G1( s ) donde, k n kn2 k y G 2( s ) 2 s 1 s 2n s n2 ganancia constante de tiempo constante de amortiguamiento frecuencia natural Responder a las siguientes cuestiones: - - IV ¿Cuál es el efecto de aumentar la ganancia en la colocación de los polos y ceros? ¿Cuál es el efecto de aumentar el valor de la constante de tiempo en el sistema de primer orden? ¿Cuál es el efecto de añadir un cero en s=-1 en el sistema de primer orden? ¿Cómo afecta la variación de la constante de amortiguamiento a la colocación de los polos y ceros del sistema de segundo orden?, ¿y la variación en la frecuencia natural? ¿Qué ocurre si la constante de tiempo en el sistema de primer orden toma un valor negativo? RESPUESTA A IMPULSO Y ESCALÓN UNITARIOS Para obtener la respuesta a impulso unitario se dispone de la función impulse, y para el escalón unitario step. Estas funciones pueden ser llamadas utilizando como único parámetro los objetos función de transferencia calculados en el apartado anterior. Calcular la respuesta ante impulso y escalón de los dos sistemas utilizados en el apartado anterior. Representar la salida en una figura distribuida de la misma forma que la mostrada en la Figura 1. Para ello utilizar el comando subplot. Un ejemplo de uso puede ser el siguiente: filas=1; columnas=2; figure(1); subplot(filas,columnas,1); plot(ones(1,10)); subplot(filas,columnas,2); plot(2*ones(1,10)); Otro comando útil para realizar representaciones gráficas es hold on. Este comando permite representar sobre la misma gráfica diferentes funciones: figure(1); plot(ones(1,10),’b’); % ‘b’, representa en azul hold on; plot(2*ones(1,10),’r’); % ‘r’, representa en rojo Para restablecer el modo normal de dibujado utilizar el comando hold off. Sistema 1 Sistema 2 Impulse Response Impulse Response 1.5 Amplitud Amplitud 4 2 0 0.5 0 -0.5 0 1 2 3 0 Time (sec) Step Response 1 0 5 10 Time (sec) Step Response 1.5 Amplitud 2 Amplitud 1 1 0.5 0 0 1 2 Time (sec) 3 0 5 10 Time (sec) Figura 1 Respuesta impulso y escalón Responder a las siguientes cuestiones: - - Medir la ganancia y el tiempo de respuesta en el sistema de primer orden Medir la ganancia, el tiempo de respuesta, el tiempo de pico y la sobreoscilación en el sistema de segundo orden. ¿Cuál es el efecto de aumentar la constante de amortiguamiento en el sistema de segundo orden?, ¿Para que valor la respuesta del sistema no tiene sobreoscilación? ¿Cuál es el efecto de aumentar la frecuencia natural en el sistema de segundo orden? Comparar las gráficas de la respuesta temporal con la posición de los polos y ceros de ambos sistemas. NOTA: Los diferentes parámetros de la respuesta en frecuencia pueden ser medidos automáticamente sobre las gráficas de la respuesta a impulso y escalón. Para ello pulsar con el botón derecho sobre la gráfica y seleccionar la característica que se desea visualizar (ver Figura 2) Figura 2 Menú de acceso a las características V RESPUESTA A ESTÍMULOS GENERALES Además de representar la respuesta de los sistemas ante entradas impulso y escalón, en ocasiones es necesario representar la respuesta ante otro tipo de estímulos. Para calcular la salida de un sistema ante una entrada de cualquier tipo, es posible utilizar el comando lsim. El formato del comando es el siguiente: lsim(sys,u,t); donde, sys es la función de transferencia del sistema, u el vector de entradas y t el vector de tiempos. Responder las siguientes cuestiones: - Utilizando lsim representar la respuesta de ambos sistemas ante una entrada tipo rampa. - Utilizar lsim para calcular la respuesta ante escalón. Comparar el resultado con el obtenido mediante la función step. - ¿Cómo responden los sistemas ante un escalón de valor 2?. Compáralo con la respuesta a escalón unitario. VI PROBLEMA PROPUESTO Dado el diagrama de bloques de la Figura 3, realizar las siguientes cuestiones: - Representar el diagrama de polos y ceros Representar la respuesta ante impulso y escalón y rampa Representar de forma individual la respuesta del primer bloque y la del segundo ¿Es posible realizar alguna simplificación en el diagrama de bloques sin que la respuesta en el tiempo cambie significativamente? 1 10s+1 4 s2+1.2s+4 Figura 3 Diagrama de bloques