SA200709.pdf
Anuncio

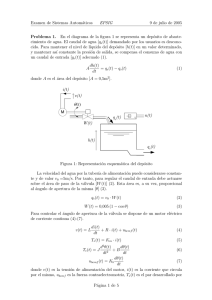
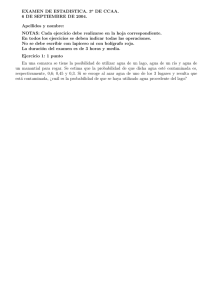
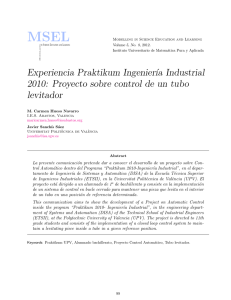
Examen de Sistemas Automáticos Datos del alumno: Apellido 1 Problema Apellido 2 Nombre DNI/NIF Problema 1. Control de altitud de un globo aerostático: Las ecuaciones linealizadas de movimiento vertical de un globo aerostático (ver figura) son Hot air 1 δ Ṫ + δT τ1 τ2 z̈ + ż Burner flame = δq = aδT + w w Wind z Ground donde δT es la desviación de la temperatura del aire caliente de la temperatura de equilibrio, en la que la fuerza de empuje iguala al peso, z es la altitud del globo, δq es la desviación del ritmo de calentamiento del quemador respecto al ritmo de equilibrio, w es la componente vertical de la velocidad y τ1 , τ2 , a son los parámetros de las ecuaciones. Se desea diseñar un sistema de control de altitud para un globo cuyos parámetros son τ1 = 250 seg, τ2 = 25 seg, a = 0,3 m/(sego C) En el sistema de control sólo se mide la altitud, de manera que la ley de control es de la forma δq(s) = D(s) · [zd (s) − z(s)] donde zd es la altitud deseada. Se pide: Trazar el diagrama de bloques del sistema controlado, especificando claramente las variables y sistemas que intervienen EPSIG de la Universidad de Oviedo 13 de septiembre de 2007 Examen de Sistemas Automáticos Problema Trazar el lugar de las raı́ces con respecto a K para una ley de control proporcional δq = K · (zd − z) Determinar el valor de K que hace el sistema marginalmente estable. Lugar de las raı́ces Klim = Para aportar la fase necesaria, se decide utilizar una doble compensación de adelanto D(s) = 2 K s+0,03 . Dibujar el diagrama de Bode asintótico del sistema con el compensador pros+0,12 porcional y con el compensador de adelanto, usando K = 1 en ambos casos. Bode (Amplitudes) 100 80 60 40 20 0 −20 −40 −60 −80 −100 −120 −4 10 −3 10 −2 −1 10 10 0 10 1 10 Bode (Fases) −90 −135 −180 −225 −270 −4 10 −3 10 EPSIG de la Universidad de Oviedo −2 10 −1 10 0 10 1 10 13 de septiembre de 2007 Examen de Sistemas Automáticos Problema Explicar brevemente por qué para obtener un piloto automático satisfactorio resulta más adecuada la doble compensación de adelanto que el control proporcional. Suponiendo que puede modificarse K, calcular para ambos reguladores los anchos de banda máximos que pueden obtenerse y los valores de K correspondientes. Prop: Kmax = BWmax = Lead: Kmax = BWmax = Para K = 10, calcular en el sistema de control con doble compensación de adelanto el error de altitud en régimen permanente para un viento vertical constante de 1 m/seg erp = EPSIG de la Universidad de Oviedo 13 de septiembre de 2007