SA200706.pdf
Anuncio

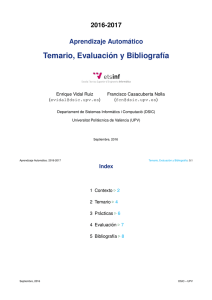
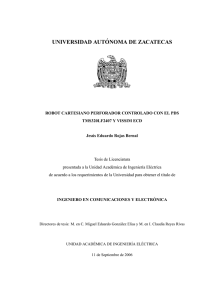
Apellidos, Nombre: DNI: Problema Una de las funciones del piloto automático de un reactor comercial de transporte es el control de la altitud. Para el diseño del subsistema de control de altitud del piloto automático solamente es relevante la dinámica a largo plazo del avión. La relación linealizada entre altitud y ángulo del elevador para esta dinámica es: 20(s + 0,01) pies H(s) = δ(s) s(s2 + 0,01s + 0,0025) grado G(s) = El piloto automático recibe del altı́metro una señal eléctrica proporcional a la altitud. Esta señal se compara con la referencia (proporcional a la altitud seleccionada por el piloto), y la diferencia proporciona una señal de error. La señal de error se procesa a través de la red de compensación, y el resultado se envı́a a los actuadores del elevador. En la figura 1 se muestra un diagrama de bloques del sistema. HR ⫹ ⌺ D(s) ⫺ d h(s) d(s) 1 s h H Figura 1: Piloto automático para control de altitud Comience considerando una ley de control proporcional D(s) = K. a) En la figura 2 puede observar el diagrama de Bode asintótico del sistema en cadena abierta, con K = 1. Determine gráficamente qué valor de K proporcionará una ωcg de 0,5 rad/seg. Bode (Amplitudes) 140 120 100 80 60 40 20 0 −20 −40 −4 10 −3 10 −2 −1 10 10 0 10 1 10 Bode (Fases) −90 −135 −180 −4 10 −3 10 −2 10 −1 10 0 10 1 10 Figura 2: Bode para K=1. Unidades: frecuencias en rad/s, amplitudes en db, fases en grados Sistemas Automáticos 21 de junio de 2007 Apellidos, Nombre: DNI: b) Para ese valor de K, ¿será estable el sistema en cadena cerrada? Indique el valor del M F y del M G para este valor de K. c) Dibuje el lugar de las raı́ces del sistema con respecto a K. Comente la evolución de la dinámica del sistema al variar K. d) ¿Qué error en régimen permanente resultará si en la referencia se produce un cambio en la altitud de 1000 pies? e) Asuma un compensador con la forma: D(s) = K Ts + 1 αT s + 1 Elija los parámetros K, T, α de modo que ωcg sea de 0,5 rad/seg. y el M F sea mayor de 50o . Verifique su diseño dibujando sobre la la figura 2 el Bode del sistema compensado y midiendo el M F . f) De cara a realizar una implementación digital del compensador seleccione razonadamente un perı́odo de muestreo, y elija un filtro de primer orden para evitar posibles problemas de aliasing debidos a ruidos en el sensor. Instrucciones Ponga nombre y apellidos en la primera cara. Deberá indicar las mediciones sobre la figura 2 y añadir sobre ella las gráficas que se le pidan. Se tendrá en cuenta la ortografı́a, ası́ como la claridad de redacción. La figura 1, ası́ como la inspiración del problema han surgido del problema 6.54. del libro ”Feedback Control Systems”, de B.E. Franklin , 5a edición, Prentice Hall, 2006. Sistemas Automáticos 21 de junio de 2007