KR 16 (PDF)
Anuncio
")
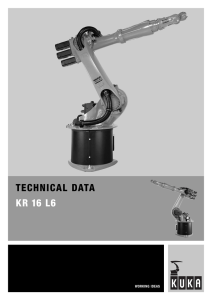
TECHNICAL DATA KR 16 WORKING IDEAS KR 16 Z 670 158 Dimensiones: mm Centro de gravedad de la carga 150 --- 185˚ +154˚ --- 130˚ R 1611 120 --- 155˚ 2412 35 680 1320 2025 Y 675 +35˚ +185˚ 260 530 1081 1027 Radio de interferencia 1611 6,3 X m 1 6 H7 Corte A--A 150 0,2 123 0,2 (27) 30 +0,5 0 50 6 78 1 63 h7 50 A 31,5 A H7 (15) (6+1 prof.) Tornillos de fijación M8, 8.8 Prof. de enroscado min. >1x d M8, 12 prof. (4x) (7x) “Y” Medida máxima para la carga adicional M6, 10 prof. “Z” Brida de montaje A 6 Superficie de apoyo para la carga adicional (2x) A3 Disposicíon de taladros para carga adicional del brazo Carga útil: 16 kg Carga adicional brazo / antebrazo / columna giratoria: 10 kg / variable / 20 kg Carga total máx.: 46 kg Número de ejes: 6 Variante de muñeca: Muñeca central 16 kg Variante de muñeca: Muñeca central 16 kg F Brida de montaje A 6: DIN ISO 9409--1--A50 Posición de montaje: Piso, pared, techo Repetibilidad: ± 0,1 mm Unidad de control: KR C2 Peso (sin unid. de control) aprox.: 235 kg Espacio de trabajo: 14,5 m3 Datos de los ejes: Campo (Software) Velocidad Eje 1 (A 1) Eje 2 (A 2) Eje 3 (A 3) Eje 4 (A 4) Eje 5 (A 5) Eje 6 (A 6) ± 185° 2) + 35° /-- 155° + 154° /-- 130° ± 350° ± 130° ± 350° 156° /s 156° /s 156° /s 330° /s 330° /s 615° /s Referido al punto de intersección eje 4/5. 2) Limitación del campo de movimiento para montaje contra la pared. D Sistema de accionamiento electromecánico con servomotores de CA sin escobillas. D Sistema de medición de desplazamiento digital--absoluto. Las indicaciones respecto a la construcción y utilización del producto tienen una función meramente informativa y no aseguran las características expuestas. Únicamente el contrato de ventas será vinculante en relación al volumen de suministros y servicios. Datos técnicos y esquemas sin compromiso para el suministro. Reservado el derecho a modificaciones. www.kuka.com WM--Nr.841612--70/S/5/09.07 RoMeDBKR16--04.03.04 E 1) 1) KUKA Roboter GmbH, Germany 45° (8x)