Apuntes Teoría del Buque
Anuncio

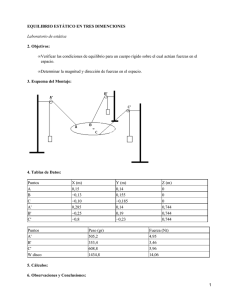
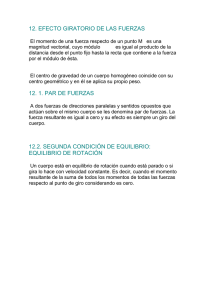
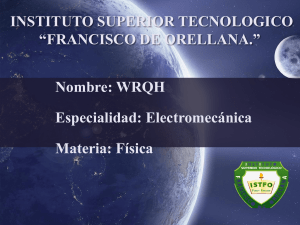
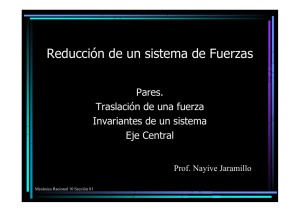
Teoría del Buque. Ingeniería Técnica Naval. Universidad Politécnica de Cartagena. Pedro Antonio Agüera García. Curso 2002, 2003. Cartagena, Octubre 2002. Emplearemos fundamentalmente dos sistemas de fuerzas, el sistema de fuerza peso, y el sistema de fuerzas de empuje. También recurriremos a sistemas equivalentes. Se dice que dos sistemas de fuerzas son equivalentes entre sí cuando obtienen la misma resultante y el mismo momento respecto de cualquier sistema de referencia. Sistema de fuerzas peso. El sistema equivalente no es el sistema inicial, únicamente se comportan igual. Dado un punto material de masa m, su peso se define por: p =m·g La aceleración no variará dadas las reducidas dimensiones del buque respecto de las del globo terrestre, la dirección de actuación de dicha fuerza es perpendicular a la superficie de la tierra, y el sentido es hacia ésta. Dado que la dirección y el sentido no variarán nunca, nos interesa conocer el módulo: p=m·g Si tomamos un elemento dm, obtendremos un peso: dp = g · dm La resultante viene a ser la suma de todos los módulos dado que la dirección y el sentido son los mismos: R = np = g · nm R = xdp = g ·xdm Densidad: dado un sistema de partículas homogéneo y uniforme, se define el concepto de densidad según: r=m/V Peso específico: dado un sistema de partículas homogéneo y uniforme, se define el concepto de peso específico según: g=p/V Si el cuerpo no es homogéneo ni uniforme, se expresa: r = dm / dV La relación existente entre ambas magnitudes es: g = dp / dV dp / dV = (g · dm) / dV = g · r g=r·g Sistema de Unidades. Sistema. Tiempo. Longitud. Masa. c.g.s. s. cm. gr. s.i. s. m. kg. s.t. s. m. u.t.m. Un kgf es el peso de un kg masa. El valor de r en el s.i. es el mismo valor de g en el s.t. r = 1 gr / cm3 ~ 1000 kg / m3 en el s.i. g = r · g = 1000 · 9.81 = 9810 N / m3 en el s.i. sin embargo, g = 1000 kg / m3 en el s.t. Cabe tener en cuenta que para la densidad se hace referencia a kg masa, y para el peso específico, a consecuencia del cambio de sistema, se trata de kg fuerza. Centro de gravedad. Es el punto de aplicación de la fuerza resultante sobre un cuerpo. Debe ser independiente del sistema de referencia que consideremos. Además es independiente de g, y depende únicamente de la masa m. |M0| = f · d · sen a M0 = F · x xx. es el sistema de referencia. ¿Cómo obtenemos el c.d.g.? xx. es el sistema de referencia. x es la mínima distancia. E = xde El momento estático es: x · de; La suma de los momentos estáticos es: El momento estático de la resultante es: La condición a imponer es: XG · E = xx · de xx · de; XG · E. Obtenemos las coordenadas del c.d.g. según: XG = (xx · de ) / E = (xx · de ) / xde El caso más general es hablar de un volumen, con lo que es necesario tomar otros dos planos de referencia que nos permitan obtener el resto de coordenadas. YG = (xy · de ) / E ZG = (xz · de ) / E XG = n xi ei / n ei YG = n yi ei / n ei Podemos tomar cualquier sistema de referencia, pero siempre se verificará que: Z G = n zi e i / n e i XG · E = xx · de Si el momento estático vale 0 es que estamos considerando un sistema de referencia que pasa por el c.d.g. x x · de = 0 ó n xi ei = 0 deben compensarse entre ambos. Es de gran importancia respetar el criterio de signos. El c.d.g. se encuentra a 1/3 de la altura del triangulo. Teorema de Barignón. XG · E = xx · de x x · de + x x · de + · · · G1 G2 X G · E = n xi E i Los momentos estáticos se pueden sumar algebraicamente siempre que: _ se verifique el criterio de signos; _ estén referidos al mismo sistema de referencia. Minicial + Mañadido = Mfinal Siempre debe cumplirse: Di · kGi + p · kg = Df · kGf Supondremos una sección cilíndrica de longitud l y área As; Si As es constante, entonces: kg (As) = kG (vol) Dada una semiesfera de igual radio, el c.d.g. no coincide con el del semicírculo ya que la sección no es constante.