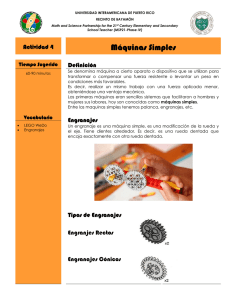
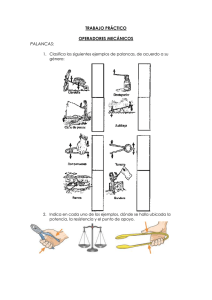
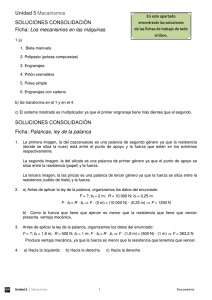
CAPITULO 5, 6, 7, 8, 9 y 10 Engranaje cónico, helicoidal y gusano Trenes de engranaje Análisis de velocidad El defecto mas serio en un sistema de engranajes de evolvente es la posibilidad de interferencia entre la punta del diente del engrane y el flanco del diente del piñon, cuando el numero de dientes en este ultimo se reduce por debajo del míınimo para ese sistema de engranajes Cuando ocurre interferencia, el metal que interfiere se elimina del flanco del diente del piñon con el cortador cuando se generan los dientes. Esa eliminación de metal se conoce como rebaje o socavación y normalmente ocurrira a menos que se tomen las medidas para impedirlo. Si el cortador no elimino este metal, los dos engranes no giraran al acoplarse debido a que el engrane que provoca la interferencia se atasca contra el flanco del piñon. No obstante, lo que sucede en la practica es que los engranes podran girar libremente debido a que el flanco del piñon se ha rebajado; sin embargo, este rebaje no solo debilita el diente del piñon sino que tambien puede eliminar una pequenñ porcion de la evolvente adyacente al cırculo base, lo cual puede reducir seriamente la longitud de accion. Engrane hecho con fresadora CAPITULO 6 ENGRANE CONICO HELICOIDAL DE GUSANO Los engranes cónicos son empleados comúnmente para transmision de potencia entre dos arboles cuyos ejes se cortan, Los ángulos pueden cortarse a cualquier ángulo, el más empleado es el de 90°. Son muy parecidos a los conos rodantes que tienen el mismo ápice. Los dientes son de la misma forma que la de los dientes de engranes rectos, pero son un poco más delgados hacia el ápice del cono. Partes de un engranaje cónico Diámetro primitivo Diámetro primitivo Diámetro exterior mayor Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor Longitud del diente Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor Longitud de la generatriz sobre el cono primitivo Longitud del diente Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor Longitud de la generatriz sobre el cono primitivo Longitud del diente β ángulo correspondiente al modulo Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor Longitud de la generatriz sobre el cono primitivo Longitud del diente β ángulo correspondiente al modulo Β´ ángulo correspondiente al Fondo del juego desdentado Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor Longitud de la generatriz sobre el cono primitivo ϗ ángulo de inclinación del divisor Δ semiangulo del cono exterior Longitud del diente β ángulo correspondiente al modulo Β´ ángulo correspondiente al Fondo del juego desdentado Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor Longitud de la generatriz sobre el cono primitivo ϗ ángulo de inclinación del divisor Δ semiangulo del cono exterior Longitud del diente β ángulo correspondiente al modulo H altura del diente en el diámetro exterior Β´ ángulo correspondiente al Fondo del juego desdentado Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor de diámetro exterior menor Longitud de la generatriz sobre el cono primitivo ϗ ángulo de inclinación del divisor Δ semiangulo del cono exterior Longitud del diente β ángulo correspondiente al modulo H altura del diente en el diámetro exterior Β´ ángulo correspondiente al Fondo del juego desdentado Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor de diámetro exterior menor Longitud de la generatriz sobre el cono primitivo α Angulo del centro del engranaje ϗ ángulo de inclinación del divisor Δ semiangulo del cono exterior Longitud del diente β ángulo correspondiente al modulo H altura del diente en el diámetro exterior Β´ ángulo correspondiente al Fondo del juego desdentado Diámetro interior mayor Diámetro primitivo Diámetro exterior mayor Formulas 𝜅 = 𝛼 − (𝛽 + 𝛽´) 𝐷𝑝 = 𝑀(𝑁) Δ= 𝛼+ 𝛽 𝐷𝑒𝑚 = 𝐷𝑝 + 2𝑀(𝑐𝑜𝑠𝛼) 𝐷𝑖𝑚= 𝐷𝑝 − (1.157)(2)(𝑀)(𝑐𝑜𝑠𝛼) 𝐷𝑝 𝐺= 2(𝑠𝑒𝑛𝛼) 𝑀 𝑡𝑎𝑛𝛽 = 𝐺 𝑡𝑎𝑛𝛽´ = 0.157 𝑀 𝐺 𝐻 = 2.167(𝑀) 𝐷𝑒𝑚 (𝐺 − 𝐿) 𝐺 𝑁 𝑁𝑖 = 𝑐𝑜𝑠𝛼 𝑑𝑒 = Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 𝐷𝑝 = 𝑀 𝑁 𝐷𝑝 = 2.5 24 = 60 𝑚𝑚 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 𝐷𝑒𝑚 = 𝐷𝑝 + 2𝑀(𝑐𝑜𝑠𝛼) 𝐷𝑒𝑚 = 60 + 2 2.5 𝑐𝑜𝑠45° = 63.3 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 𝐷𝑖𝑚= 𝐷𝑝 − (1.157)(2)(𝑀)(𝑐𝑜𝑠𝛼) 𝐷𝑖𝑚 = 60 − (1.157)(2)(2.5)(𝑐𝑜𝑠45°) = 55.909 𝑚𝑚 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝐺= 𝐷𝑝 2(𝑠𝑒𝑛𝛼) 𝐺= 60 = 42.42 𝑚𝑚 2(𝑠𝑒𝑛 45°) 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑡𝑎𝑛𝛽 = 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 𝑀 𝐺 2.5 𝑡𝑎𝑛𝛽 = = 0.0589 𝐴𝑅𝐶𝑇 3°22´ 42.42𝐺 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 𝑀 𝑡𝑎𝑛𝛽´ = 0.157 𝐺 2.5 = 0.0092473 42.42 𝐴𝑅𝐶𝑇 = 0°31´ 𝑡𝑎𝑛𝛽´ = 0.157 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 𝜅 = 𝛼 − (𝛽 + 𝛽´) 𝜅 = 45° − 3°22´ + 0°31´ = 41°7´ Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 Δ= 𝛼+ 𝛽 Δ = 45° + 3°22´ = 48°22´ 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝐻 = 2.167(𝑀) 𝑁 = 24 𝐻 = 2.167 2.5 = 5.417 𝑚𝑚 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑑𝑒 = 𝐷𝑒𝑚 (𝐺 − 𝐿) 𝐺 𝑑𝑒 = 63.53 (42.42 − 14) = 42.56 𝑚𝑚 42.42 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 Calcular los elementos necesarios para maquinar un engranaje cónico de dientes restos 𝐷𝑎𝑡𝑜𝑠: 𝑀 = 2.5 𝑁 = 24 𝛼 = 45 ° 𝐿 = 14 𝑚𝑚 𝑁 𝑁𝑖 = 𝑐𝑜𝑠𝛼 𝑁𝑖 = 24 = 34 𝑐𝑜𝑠45° Un par de engranes cónicos tienen los siguientes datos: 𝑆𝑒 𝑡𝑜𝑚𝑎 𝑒𝑙 𝑑𝑒 𝑚𝑒𝑛𝑜𝑟 𝑣𝑎𝑙𝑜𝑟 Tipos de Engranajes Helicoidales Engranajes Helicoidales de Doble Helicoide: Tienen dientes inclinados en dos direcciones opuestas. Esto permite una mayor capacidad de carga y es especialmente útil en aplicaciones de alta potencia. Engranajes Helicoidales de Ángulo Recto: Se utilizan en aplicaciones donde los ejes de los engranajes deben ser perpendiculares entre sí. Son comunes en cajas de cambios de automóviles. Engranajes Helicoidales Cónicos: Estos engranajes tienen dientes helicoidales y ejes que se cruzan en un punto. Son ideales para transmitir movimiento entre ejes que se intersecan. Aplicaciones de los Engranajes Helicoidales Los engranajes helicoidales se encuentran en una amplia gama de aplicaciones, incluyendo: Automoción: Se utilizan en las transmisiones de automóviles para proporcionar cambios de velocidad suaves y eficientes. Maquinaria Industrial: Se emplean en máquinas herramientas, transportadores y equipos de fabricación. Aerogeneradores: Los engranajes helicoidales ayudan a convertir la energía del viento en energía eléctrica. Equipos Marinos: Son esenciales en la industria naval para la transmisión de potencia en motores y sistemas de propulsión. Ventajas de los Engranajes Helicoidales Operación Silenciosa: Los dientes helicoidales reducen el ruido y la vibración durante la transmisión de potencia. Mayor Eficiencia: Transmiten potencia de manera más eficiente en comparación con los engranajes rectos debido a la distribución uniforme de la carga. Mayor Capacidad de Carga: Los engranajes helicoidales pueden manejar cargas más pesadas debido a su diseño. Transmisión de Potencia Suave: La acción helicoidal proporciona una transmisión de potencia suave y uniforme, lo que es beneficioso en aplicaciones de alta velocidad. Datos para encontrar el ángulo engranaje helicoidal El Angulo de 10° se usa para velocidades muy bajas. El Angulo de 30° se usa para velocidades medias El Angulo de 45° se usa para velocidades altas 740 A pesar de que los engranajes planetarios también están formados por varias ruedas dentadas, no se deben confundir con los trenes de engranajes, ya que son sistemas de engranajes diferentes con características distintas. Las partes de un engranaje planetario son: Sol: es el engranaje central del engranaje planetario. Planetas: son los engranajes que están engranados al sol y giran a su alrededor. Portaplanetas: es la parte del engranaje planetario que sujeta los planetas. Por lo tanto, gira alrededor del sol a la misma velocidad que los planetas. Corona: es un engranaje externo que tiene los dientes en su cara interna y engranan con los dientes de los planetas. Capitulo 7 Maquinas y mecanismos Tren de engranajes Hablamos de tren de engranajes compuesto cuando en alguno de los ejes existe más de una rueda dentada. En este mecanismo la transmisión se realiza entre más de dos ejes simultáneamente, para lo que es necesario que en cada eje intermedio vayan montadas dos ruedas dentadas. trenes de engranajes. Si para realizar la transmisión necesitamos más de un par de ruedas dentadas, entonces el mecanismo, se denomina tren de engranajes. Tenemos un tren de engranajes simple cuando las ruedas dentadas están en un mismo plano o, lo que es lo mismo, cuando en cada eje existe una sola rueda. Hablamos de tren de engranajes compuesto cuando en alguno de los ejes existe más de una rueda dentada. En este mecanismo la transmisión se realiza entre más de dos ejes simultáneamente, para lo que es necesario que en cada eje intermedio vayan montadas dos ruedas dentadas. Una de ellas engrana con la rueda motriz, que es la que proporciona el movimiento, y la otra conecta con el eje siguiente al que conduce. Ejemplo de tren de engranaje Un engranaje planetario, también llamado engranaje epicicloidal, es un sistema de engranajes formado por varios engranajes externos (planetas) que giran alrededor de un engranaje central (sol). Los engranajes planetarios suelen tener integrado un brazo móvil (portaplanetas) que puede rotar. Además, los engranajes planetarios también pueden incorporar un engranaje auxiliar externo (corona). En general, los ejes de las piezas de los engranajes planetarios son rectos, no obstante, también existen casos especiales en los que se utilizan engranajes cónicos y, por tanto, los ejes no son paralelos. En general, los engranajes planetarios suelen estar formados por tres planetas, ya que es la disposición en la que mejor se reparte la carga. En cualquier engranaje planetario, uno de sus componentes debe permanecer fijo, otro componente es el elemento de entrada, que proporciona potencia al sistema, y otro componente es el elemento de salida, que transmite la potencia a otro dispositivo mecánico. Tipos de engranajes planetarios Los engranajes planetarios se clasifican según el elemento que se fija. Así pues, los diferentes tipos de engranajes planetarios son los siguientes: Engranaje planetario con la corona fija: giran todos los elementos del engranaje planetario excepto la corona. Generalmente, el elemento de salida es el portaplanetas. En este caso la velocidad angular se reduce y el par aumenta. Engranaje planetario con los planetas fijos: en este tipo de engranajes planetarios se fijan los planetas, de manera que la corona es el elemento de entrada y el portaplanetas es el elemento de salida. El par aumenta y la velocidad angular se reduce, pero con menor medida que en el caso anterior. Engranajes interiores o satélites Engranaje exterior o corona con dientes interiores Engranajes interior o planeta Porta planetas Eje A Eje A Eje A Calcular la velocidad del los engranajes Planetarios y en A Calcular el centro instantáneo de rotación Calcular la aceleración en el punto B entre la corona y el planeta superior.