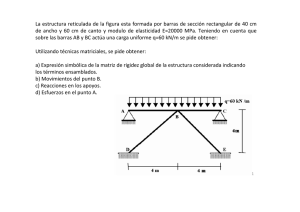
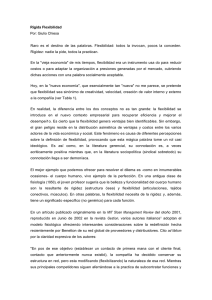
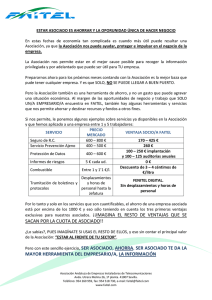
ANÁLISIS DE ARMADURAS Introducción El método de la rigidez es un método de análisis del desplazamiento. Puede usarse para analizar estructuras estáticamente determinadas, así como indeterminadas. Para aplicar el método de la rigidez, se tiene el siguiente procedimiento: 1 II III • Subdividir la estructura en elementos finitos (barras). • Identificar sus puntos extremos (nodos). • Determinar las propiedades de fuerza desplazamiento para cada elemento. • Agrupar estas relaciones en la Matriz de Rigidez de la Estructura. • Determinar los desplazamientos desconocidos en los nodos para cualquier carga sobre la estructura. • Calcular las fuerzas internas y externas. IDENTIFICACIÓN DEL ELEMENTO Y NODO Nomenclatura La nomenclatura para la identificación del elemento y nodo de la estructura será como se muestra en la Fig 14-1: a) Cada elemento se identificará por un número encerrado en un cuadrado. b) Cada nodo se identificará por un número encerrado en un círculo. Para percibir el extremo “cercano” y “lejano” de cada elemento se dibujará una flecha a lo largo del elemento y su punta dirigida al extremo lejano. COORDENADAS Globales y del elemento A fin de precisar el sentido correcto de las cargas y desplazamientos (cantidades vectoriales) se establecerán sistemas de coordenadas. Un sistema de coordenadas globales • Servirá para especificar el sentido de cada uno de los componente de la fuerza y el desplazamiento en los nodos. Un sistema de coordenadas locales • Servirá para especificar el sentido de dirección de los desplazamientos y las cargas internas del elemento. INDETERMINACIÓN CINEMÁTICA Grados de libertad No restringidos Los grados de libertad no restringidos de una estructura (armadura, viga o marco) representan las incógnitas primarias de cualquier método de análisis de desplazamientos. a) Los números de código más bajos se usarán para identificar los desplazamientos desconocidos (grados de libertad no restringidos). Para efectos de aplicación cada grado de libertad se especificará con un código numérico. Como regla general, para una armadura, hay dos grados de libertad para cada junta (nodo). b) Los números de código más grandes se usarán para identificar los desplazamientos conocidos, grados de libertad restringidos. MATRIZ DE RIGIDEZ DEL ELEMENTO Un elemento de una armadura puede desplazarse únicamente a lo largo de su eje, por lo tanto, pueden ocurrir dos desplazamientos independientes. Cuando se impone un desplazamiento positivo 𝑑𝑑𝑁𝑁 sobre el extremo cercano del elemento, mientras el extremo lejano se mantiene articulado (Fig. 14-2 a), las fuerzas que se desarrollan en los extremos son: ′ 𝑞𝑞𝑁𝑁 = 𝐴𝐴𝐴𝐴 𝑑𝑑 𝐿𝐿 𝑁𝑁 , 𝑞𝑞𝐹𝐹′ = − 𝐴𝐴𝐴𝐴 𝑑𝑑 𝐿𝐿 𝑁𝑁 𝑞𝑞𝐹𝐹′′ = 𝐴𝐴𝐴𝐴 𝑑𝑑 𝐿𝐿 𝐹𝐹 ′ 𝑞𝑞𝑁𝑁 es negativa en el extremo ‘lejano’ para mantener el equilibrio. Por otra parte, cuando se impone un desplazamiento en el extremo lejano, manteniendo articulado el extremo ‘cercano’ las fuerzas desarrolladas son: ′′ 𝑞𝑞𝑁𝑁 =− 𝐴𝐴𝐴𝐴 𝑑𝑑 𝐿𝐿 𝐹𝐹 , MATRIZ DE RIGIDEZ DEL ELEMENTO Así, las fuerzas causadas por ambos desplazamientos son: 𝐴𝐴𝐴𝐴 𝐴𝐴𝐴𝐴 𝑞𝑞𝑁𝑁 = 𝑑𝑑 − 𝑑𝑑 𝐿𝐿 𝑁𝑁 𝐿𝐿 𝐹𝐹 𝐴𝐴𝐴𝐴 𝐴𝐴𝐴𝐴 𝑞𝑞𝐹𝐹 = − 𝑑𝑑𝑁𝑁 + 𝑑𝑑 𝐿𝐿 𝐿𝐿 𝐹𝐹 Éstas ecuaciones definen la relación carga desplazamiento, que expresadas matricialmente se aprecian así: O bien: 𝐴𝐴𝐴𝐴 1 𝑞𝑞𝑁𝑁 = 𝐿𝐿 −1 𝑞𝑞𝐹𝐹 Donde: 𝐤𝐤 ′ = −1 𝑑𝑑𝑁𝑁 ; 1 𝑑𝑑𝐹𝐹 𝒒𝒒 = 𝒌𝒌′ 𝒅𝒅 𝐴𝐴𝐴𝐴 1 𝐿𝐿 −1 −1 1 Se denomina matriz de rigidez del elemento, y es la misma forma para cada elemento. Físicamente, 𝒌𝒌′𝒊𝒊𝒊𝒊 , representa la fuerza en la junta i cuando se impone un desplazamiento en la junta j. MATRICES DE TRANSFORMACIÓN DE DESPLAZAMIENTO Y FUERZA Cosenos directores Debido a que la ecuación de la rigidez de una estructura está definida en coordenadas globales, es necesario transformar las fuerzas q de los elementos y sus desplazamiento d definidos en coordenadas locales. A fin de establecer una convención, se considera que las coordenadas globales x e y positivas estarán a la derecha y hacia arriba, respectivamente. Los ángulos menores entre los ejes globales (x,y) positivos, y el eje local x’ positivo se definirán como: 𝜃𝜃𝑥𝑥 , 𝜃𝜃𝑦𝑦 . MATRICES DE TRANSFORMACIÓN DE DESPLAZAMIENTO Y FUERZA Cosenos directores Los cosenos directores de estos ángulos se usarán en el análisis matricial y se identificarán como: 𝜆𝜆𝑥𝑥 = cos 𝜃𝜃𝑥𝑥 , 𝜆𝜆𝑦𝑦 = cos 𝜃𝜃𝑦𝑦 . Observe el ejemplo del elemento NF diagonal de la armadura de la Fig. 14-4. 𝜆𝜆𝑥𝑥 = cos 𝜃𝜃𝑥𝑥 = 𝑥𝑥𝐹𝐹 − 𝑥𝑥𝑁𝑁 , 𝐿𝐿 𝜆𝜆𝑦𝑦 = cos 𝜃𝜃𝑦𝑦 = 𝑦𝑦𝐹𝐹 − 𝑦𝑦𝑁𝑁 𝐿𝐿 MATRIZ DE TRANSFORMACIÓN Del desplazamiento En coordenadas globales, cada extremo del elemento tiene dos grados de libertad o desplazamientos independientes. Cuando el extremo ‘lejano’ se mantiene articulado y al extremo cercano le aplicamos desplazamientos 𝐷𝐷𝑁𝑁𝑁𝑁 y 𝐷𝐷𝑁𝑁𝑁𝑁 los desplazamientos correspondientes a lo largo del elemento son: 𝐷𝐷𝑁𝑁𝑁𝑁 cos 𝜃𝜃𝑥𝑥 , 𝐷𝐷𝑁𝑁𝑁𝑁 cos 𝜃𝜃𝑦𝑦 respectivamente. El efecto de ambos desplazamientos globales hace que el elemento se desplace: 𝑑𝑑𝑁𝑁 = 𝐷𝐷𝑁𝑁𝑁𝑁 cos 𝜃𝜃𝑥𝑥 + 𝐷𝐷𝑁𝑁𝑁𝑁 cos 𝜃𝜃𝑦𝑦 . De manera similar, los desplazamientos 𝐷𝐷𝐹𝐹𝐹𝐹 y 𝐷𝐷𝐹𝐹𝐹𝐹 aplicados en forma sucesiva en el extremo lejano F, mientras el extremo ‘cercano’ se mantiene articulado, Fig. 14-5 c) y d), harán que el elemento se desplace: MATRIZ DE TRANSFORMACIÓN Del desplazamiento 𝑑𝑑𝐹𝐹 = 𝐷𝐷𝐹𝐹𝐹𝐹 cos 𝜃𝜃𝑥𝑥 + 𝐷𝐷𝐹𝐹𝐹𝐹 cos 𝜃𝜃𝑦𝑦 . Habiendo establecido que: 𝜆𝜆𝑥𝑥 = cos 𝜃𝜃𝑥𝑥 , 𝜆𝜆𝑦𝑦 = cos 𝜃𝜃𝑦𝑦 , entonces: En forma matricial puede escribirse como: O bien: Donde: 𝐝𝐝 = 𝐓𝐓𝐓𝐓 𝑻𝑻 = 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 0 0 0 0 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝑑𝑑𝑁𝑁 = 𝐷𝐷𝑁𝑁𝑁𝑁 𝜆𝜆𝑥𝑥 + 𝐷𝐷𝑁𝑁𝑁𝑁 𝜆𝜆𝑦𝑦 ; 𝑑𝑑𝐹𝐹 = 𝐷𝐷𝐹𝐹𝐹𝐹 𝜆𝜆𝑥𝑥 + 𝐷𝐷𝐹𝐹𝐹𝐹 𝜆𝜆𝑦𝑦 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝑑𝑑𝑁𝑁 = 𝑑𝑑𝐹𝐹 0 0 0 0 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝐷𝐷𝑁𝑁𝑁𝑁 𝐷𝐷𝑁𝑁𝑁𝑁 ; 𝐷𝐷𝐹𝐹𝐹𝐹 𝐷𝐷𝐹𝐹𝐹𝐹 Y transforma los 4 desplazamientos D globales 𝑥𝑥, 𝑦𝑦 , en sólo dos desplazamientos locales 𝑥𝑥 ′ , 𝑦𝑦 ′ ; a T se le conoce como la matriz de transformación del desplazamiento. MATRIZ DE TRANSFORMACIÓN De la Fuerza Considerando la aplicación de la fuerza 𝑞𝑞𝑁𝑁 en el extremo ‘cercano’ mientras permanece articulado el extremo lejano, obtenemos dos componentes globales de 𝑞𝑞𝑁𝑁 en 𝑁𝑁. 𝑄𝑄𝑁𝑁𝑁𝑁 = 𝑞𝑞𝑁𝑁 cos 𝜃𝜃𝑥𝑥 𝑄𝑄𝑁𝑁𝑁𝑁 = 𝑞𝑞𝑁𝑁 cos 𝜃𝜃𝑦𝑦 𝑄𝑄𝐹𝐹𝐹𝐹 = 𝑞𝑞𝐹𝐹 cos 𝜃𝜃𝑥𝑥 𝑄𝑄𝐹𝐹𝐹𝐹 = 𝑞𝑞𝐹𝐹 cos 𝜃𝜃𝑦𝑦 . Similar a esta situación, obtenemos dos componentes globales al aplicar 𝑞𝑞𝐹𝐹 en 𝐹𝐹. Supliendo la notación de cosenos directores tenemos: 𝑄𝑄𝑁𝑁𝑁𝑁 = 𝑞𝑞𝑁𝑁 𝜆𝜆𝑥𝑥 𝑄𝑄𝐹𝐹𝐹𝐹 = 𝑞𝑞𝐹𝐹 𝜆𝜆𝑥𝑥 𝑄𝑄𝑁𝑁𝑁𝑁 = 𝑞𝑞𝑁𝑁 𝜆𝜆𝑦𝑦 𝑄𝑄𝐹𝐹𝐹𝐹 = 𝑞𝑞𝐹𝐹 𝜆𝜆𝑦𝑦 MATRIZ DE TRANSFORMACIÓN De la Fuerza Expresado en forma matricial llegamos a que: O bien: Donde: 𝐐𝐐 = 𝐓𝐓 𝑇𝑇 𝐪𝐪 𝐓𝐓 𝑇𝑇 = 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 0 0 𝜆𝜆𝑥𝑥 𝑄𝑄𝑁𝑁𝑁𝑁 𝑄𝑄𝑁𝑁𝑁𝑁 𝜆𝜆𝑦𝑦 = 𝑄𝑄𝐹𝐹𝐹𝐹 0 𝑄𝑄𝐹𝐹𝐹𝐹 0 0 0 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 0 0 𝑞𝑞𝑁𝑁 𝜆𝜆𝑥𝑥 𝑞𝑞𝐹𝐹 𝜆𝜆𝑦𝑦 𝐓𝐓 𝑇𝑇 transforma las dos fuerzas 𝐪𝐪 locales 𝑥𝑥 ′ , 𝑦𝑦 ′ que actúan en los extremos del elemento en las cuatro componentes de la fuerza 𝐐𝐐 globales 𝑥𝑥, 𝑦𝑦 ; también se conoce como matriz de transformación de la fuerza y es la transpuesta de la matriz de transformación del desplazamiento. MATRIZ DE RIGIDEZ GLOBAL Del elemento Combinando los resultados de las secciones anteriores podemos determinar la matriz global de rigidez de un elemento. Para ello, relacionamos los componentes globales de fuerza 𝑸𝑸 del elemento con sus desplazamientos globales 𝑫𝑫. Recordemos que 𝐐𝐐 = 𝐓𝐓 𝑇𝑇 𝐪𝐪 ; luego: 𝐪𝐪 = 𝐤𝐤 ′ 𝐝𝐝 ; y 𝐝𝐝 = 𝐓𝐓𝐓𝐓, en consecuencia: 𝐐𝐐 = 𝐓𝐓 𝑇𝑇 𝐪𝐪 = 𝐓𝐓 𝑇𝑇 𝐤𝐤 ′ 𝐝𝐝 = 𝐓𝐓 𝑇𝑇 𝐤𝐤 ′ 𝐓𝐓 𝐃𝐃 . Es decir: 𝐐𝐐 = 𝐤𝐤𝐤𝐤 , Donde: 𝐤𝐤 = 𝐓𝐓 𝑇𝑇 𝐤𝐤 ′ 𝐓𝐓 Se conoce como la matriz de rigidez del elemento en coordenadas globales. MATRIZ DE RIGIDEZ GLOBAL Del elemento Esta matriz de calcula como: 𝑘𝑘 = 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 0 0 0 0 𝐴𝐴𝐴𝐴 1 𝜆𝜆𝑥𝑥 𝐿𝐿 −1 𝜆𝜆𝑦𝑦 −1 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 1 0 0 0 0 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝑁𝑁𝑦𝑦 𝐹𝐹𝑦𝑦 k representa las relaciones fuerza-desplazamiento para el elemento, cuando las componentes de la fuerza y el desplazamiento en los extremos del elemento están las direcciones globales 𝑥𝑥, 𝑦𝑦 . Y el resultado de la multiplicación de matrices es: 𝑁𝑁𝑥𝑥 𝜆𝜆2𝑥𝑥 𝐴𝐴𝐴𝐴 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝐤𝐤 = 𝐿𝐿 −𝜆𝜆2𝑥𝑥 −𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝜆𝜆2𝑦𝑦 −𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 −𝜆𝜆2𝑦𝑦 𝐹𝐹𝑥𝑥 −𝜆𝜆2𝑥𝑥 −𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝜆𝜆2𝑥𝑥 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 −𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 −𝜆𝜆2𝑦𝑦 𝜆𝜆𝑥𝑥 𝜆𝜆𝑦𝑦 𝜆𝜆2𝑦𝑦 𝑁𝑁𝑥𝑥 𝑁𝑁𝑦𝑦 𝐹𝐹𝑥𝑥 𝐹𝐹𝑦𝑦 Cada uno de los términos de la matriz es un coeficiente de influencia de la rigidez kij, denota la componente de fuerza x o y en i, necesaria para originar una componente unitaria de desplazamiento asociada x o y en j. MATRIZ DE RIGIDEZ DE LA ARMADURA La matriz de rigidez de la estructura K es el resultado del ensamblaje de todas las matrices de rigidez de cada uno de sus elementos. La matriz de rigidez de la estructura tendrá un orden igual al número de código mayor asignado a la armadura. El ensamblaje de la matriz se hace por la designación de filas y columnas mediante los cuatro números de código: 𝑁𝑁𝑥𝑥 , 𝑁𝑁𝑦𝑦 , 𝐹𝐹𝑥𝑥 , 𝐹𝐹𝑦𝑦 ; que se utilizan para identificar los dos grados de libertad que puede ocurrir en cada extremo del elemento. Cuando se ensamblen las matrices k, cada elemento en k se pondrá entonces en su misma designación de fila o columna en la matriz de rigidez de la armadura. Cuando dos o más elementos están conectados a la misma junta o nodo, entonces algunos elementos de cada matriz k del elemento, se asignará a la misma posición en la matriz K. MATRIZ DE RIGIDEZ DE LA ARMADURA Cuando eso ocurre, los elementos asignados a la ubicación común deben sumarse algebraicamente. La razón es que la matriz de rigidez k representa la resistencia del elemento a una fuerza aplicada en su extremo. Así que, la suma de las resistencias en la dirección x o y al formar la matriz K determina la resistencia total de cada junta a un desplazamiento unitario en la dirección x o y. APLICACIÓN DEL MÉTODO DE RIGIDEZ Análisis de Armaduras La matriz de rigidez de la estructura relaciona las componentes de fuerza global Q que actúan sobre la armadura con los desplazamientos globales D. Esto se conoce como la ecuación de la rigidez de la estructura. En la asignación de números de código, utilizamos los pequeños para GDL no restringidos y los mayores para GDL restringidos. Esto nos permite hacer una partición de la ecuación de rigidez anterior como sigue: 𝐐𝐐 = 𝐊𝐊𝐊𝐊 𝑄𝑄𝑘𝑘 𝐾𝐾 = 11 𝐾𝐾21 𝑄𝑄𝑢𝑢 𝐾𝐾12 𝐷𝐷𝑢𝑢 𝐾𝐾22 𝐷𝐷𝑘𝑘 APLICACIÓN DEL MÉTODO DE RIGIDEZ Análisis de Armaduras Donde: 𝑄𝑄𝑘𝑘 y 𝐷𝐷𝑘𝑘 = Cargas externas y desplazamientos conocidos. Aquí las cargas en la armadura existen como parte del problema; y los desplazamientos suelen especificarse como iguales a cero, debido a las restricciones impuestas por los rodillos o pasadores. 𝑄𝑄𝑢𝑢 y 𝐷𝐷𝑢𝑢 = Cargas y desplazamientos desconocidos. Aquí las cargas representan las reacciones en los soportes; y los desplazamientos se presentan en las juntas donde el movimiento no está restringido en una dirección particular. De la partición de la ecuación de rigidez obtenemos el SEL: A menudo 𝑫𝑫𝑘𝑘 = 𝟎𝟎, porque los soportes no se desplazan, cuando se da este caso, la Ecu. 1 del SEL se reduce a: 𝑸𝑸𝑘𝑘 = 𝑲𝑲11 𝑫𝑫𝑢𝑢 + 𝑲𝑲12 𝑫𝑫𝑘𝑘 𝑸𝑸𝑢𝑢 = 𝑲𝑲21 𝑫𝑫𝑢𝑢 + 𝑲𝑲22 𝑫𝑫𝑘𝑘 𝑸𝑸𝑘𝑘 = 𝑲𝑲11 𝑫𝑫𝑢𝑢 0 −2 0 −4 0 𝑄𝑄𝑘𝑘 = −2 0 0 0 0 0 𝐷𝐷1 𝐷𝐷2 𝐷𝐷3 𝐷𝐷4 𝐷𝐷5 𝐷𝐷𝑢𝑢 = 𝐷𝐷6 𝐷𝐷7 𝐷𝐷8 𝐷𝐷9 𝐷𝐷10 𝐷𝐷11 𝑅𝑅𝐷𝐷𝐷𝐷 𝑄𝑄𝑢𝑢 = 𝑅𝑅𝐴𝐴𝐴𝐴 𝑅𝑅𝐴𝐴𝐴𝐴 0 𝐷𝐷𝑘𝑘 = 0 0 APLICACIÓN DEL MÉTODO DE RIGIDEZ Análisis de Armaduras La ecuación anterior simboliza la colección de todas las ecuaciones de equilibrio de fuerzas aplicadas a las juntas, donde las cargas externas son cero o tienen un valor conocido. Si se despeja 𝑫𝑫𝑢𝑢 resulta: 𝑫𝑫𝑢𝑢 = 𝑲𝑲11 −1 � 𝑸𝑸𝑘𝑘 Obtenemos una solución directa de todos los desplazamientos de juntas desconocidos. Entonces, a partir de la Ecu. 2 del SEL, donde 𝑫𝑫𝑘𝑘 = 𝟎𝟎 y 𝑫𝑫𝑢𝑢 es conocido, obtenemos: 𝑸𝑸𝑢𝑢 = 𝑲𝑲21 𝑫𝑫𝑢𝑢 Esto es, las reacciones desconocidas en los soportes. Luego, las fuerzas en cada elemento puede determinarse mediante la ecuación: 𝐷𝐷𝑁𝑁𝑁𝑁 𝐷𝐷𝑁𝑁𝑁𝑁 𝐴𝐴𝐴𝐴 𝑞𝑞𝑁𝑁 ′ 𝑻𝑻𝑻𝑻 −𝜆𝜆 −𝜆𝜆 𝜆𝜆 𝜆𝜆 𝒒𝒒 = 𝒌𝒌 𝑥𝑥 𝑦𝑦 𝑥𝑥 𝑦𝑦 𝑞𝑞𝐹𝐹 = 𝐿𝐿 𝐷𝐷𝐹𝐹𝐹𝐹 𝐷𝐷𝐹𝐹𝐹𝐹