Universidad Mayor de San Simón
Informe n°1
Sistemas de primer orden
NOMBRE: CHOQUE CAYO JHON BETTO
CARRERA: ELECTROMECANICA
DOCENTE: Ing. Alberto Arispe
MATERIA: Lab. Sistemas de control dinámico
Cochabamba-Bolivia
LABORATORIO 1
Objetivo:
Determinar la función de transferencia de un sistema de primer orden.
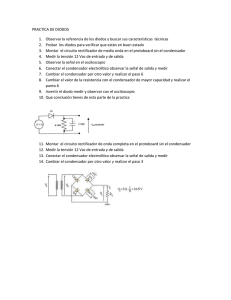
Circuito:
ESQUEMA CIRCUITAL:
Simulador virtual proteus
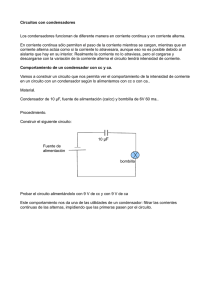
El circuito RC más simple que existe consiste en un condensador y una resistencia en serie.
Cuando un circuito consiste solo de un condensador cargado y una resistencia, el
condensador descargará su energía almacenada a través de la resistencia. La tensión o
diferencia de potencial eléctrico a través del condensador, que depende del tiempo, puede
hallarse utilizando la ley de Kirchhoff de la corriente, donde la corriente a través del
condensador debe ser igual a la corriente a través de la resistencia. Esto resulta en
la
ecuación
diferencial
lineal:
Resolviendo esta ecuación para V se obtiene la fórmula de decaimiento exponencial:
donde V0 es la tensión o diferencia de potencial eléctrico entre las placas
del condensador en el tiempo t = 0.
El tiempo requerido para que el voltaje caiga hasta
tiempo RC" y es dado por
es denominado "constante de
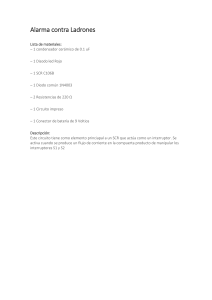
Considerando que queremos ver una respuesta de medio periodo solo de carga que sería
T/2
Condiciones iniciales:
𝑉0 = 0
𝑉𝑖 (𝑡) = 8𝑉
5 ∗ 𝜏 = 5 ∗ 𝑅𝐶
𝑉𝑖 = 𝑉𝑅 + 𝑉𝑐
𝑉𝑖 (𝑡) = 𝐼𝑐 ∗ 𝑅 + 𝑉0(𝑡)
𝑉𝑖 (𝑡) = 𝐶𝑅
Aplicando la transformada de Laplace:
𝑑𝑉0 (𝑡)
+ 𝑉0 (𝑡)
𝑑𝑡
8
= 𝐶𝑅[𝑠𝑉0 (𝑠) − 𝑉0 (0)] + 𝑉0 (𝑠)
𝑠
8
𝑠
𝑉0 (𝑠) =
𝐶𝑅𝑠 + 1
8
𝑠
𝑉0 (𝑠) =
1 𝐶𝑅
(𝑠 + 𝐶𝑅)
𝑉0 (𝑠) =
8
𝐶𝑅
𝑠 (𝑠 +
1
)
𝐶𝑅
Por fracciones parciales:
8
𝐴
𝐵
𝐶𝑅
+
=
𝑆 (𝑠 + 1 ) 𝑠 ∗ (𝑠 + 1 )
𝐶𝑅
𝑅𝐶
8
(𝑅𝐶 )
1
𝑠 ∗ (𝑠 + 𝑅𝐶 )
=
1
(𝐴 ∗ (𝑠 + 𝑅𝐶 ) + 𝐵𝑠)
1
𝑠 ∗ (𝑠 + 𝑅𝐶 )
𝑆: 𝐴 + 𝐵 = 0
𝐴
8
𝑆 0:
=
𝑅𝐶 𝑅𝐶
𝐴=8
𝐵 = −8
Entonces tendremos:
𝑉0(𝑠) =
Por la inversa
8
8
−
𝑠 𝑠+ 1
𝑅𝐶
𝑉0(𝑡)= 8 ∗ (1 − 𝑒 −𝑡/𝑅𝐶 )
𝜏 𝑎𝑙 63 % = 𝜏 = 𝑅𝐶
Como condición inicial
𝜏 = 1.2 𝑠 𝑦 𝑉𝑜(𝑡) = 5.064 𝑉
Remplazando en la ecuación
5.064 = 8(1 − 𝑒 −1.2/𝑅𝐶 )
1.2
5.064
ln (
) = ln(1) − ln 𝑒 −𝑅𝐶
8
−0.4573 = − (−
𝑅𝐶 = −0.38108
1.2
)
𝑅𝐶
Se determinara valores comerciales de R y C
Donde remplazando se tendría la función de transferencia:
1
𝐺(𝑠) =
1 + 0.38108 ∗ 𝑆
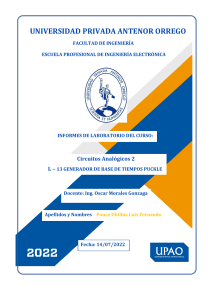
Simulador virtual proteus
CONCLUSIONES
En conclusión los sistemas de primer orden por definición son aquellos que tienen un solo
polo y están representados por ecuaciones diferenciales ordinarias de primer orden.
También pudimos realizar un sistema de primer orden el más básico con el simulador
virtual.
 0
0