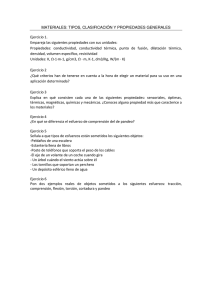
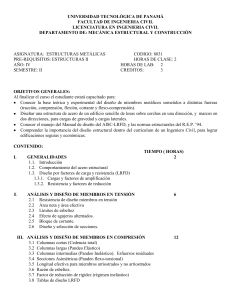
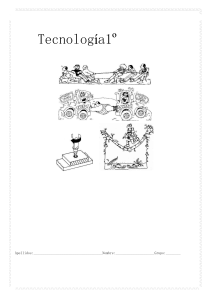
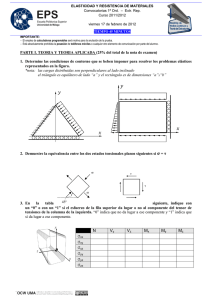
TEMARIO Capítulo 2: Filosofías de diseño. Capítulo 3: Tensión. Compresión. Flexión Capítulo 4: Principios de diseño plástico. BIBLIOGRAFÍA “Estructuras de Acero. Comportamiento y diseño”; Oscar de Buen López de Heredia; Limusa; 1982. “Steel Structures. Design and Behavior”; Charles G. Salmon and John E. Johnson; Prentice Hall; 1996. “Steel Structures. Controling Behavior Through Design”; Robert Englekirk; John Wiley; 1994. “Ductile Design of Steel Structures”; Michael Bruneau, Chi-Ming Uang and Andrew Whittaker; Mc Graw Hill; 1998. “Moment Resistant Connections of Steel Structures in Seismic Areas. Design and Reliability”; Editor: F. M. Mazzolani; E & FN Spon; 2000. “Guide to Stability Design Criteria for Metal Structures”; Theodore V. Galambos; John Wiley; 1988. TEMARIO Capítulo 2: Filosofías de diseño. 2.1 Generalidades 2.2 Estados límite 2.3 Esfuerzos permisibles 2.4 Diseño plástico 2.5 Factores de seguridad 2.1 Generalidades Dos filosofías de diseño se usan actualmente: - Diseño por esfuerzos de trabajo (Diseño por Esfuerzos Permisibles, ASD) - Diseño por estados límite (Factores de carga y reducción de resistencia, LRFD) 2.1 Generalidades La teoría de “diseño por esfuerzos de trabajo” ha sido la principal filosofía de diseño en los últimos 100 años. La teoría de “diseño por estados límite” se ha desarrollado en los últimos 25 años aproximadamente. Esta teoría es más racional y está basada en aspectos probabilísticos. En esta teoría se han incluido métodos como “diseño por esfuerzos últimos”, “diseño por resistencia”, “diseño plástico” y “diseño por factores de carga y reducción de resistencia (LRFD)”. 2.1 Generalidades Las características fundamentales que debe cumplir toda estructura son: • Resistencia R • Rigidez • Ductilidad d El diseño debe considerar posibles sobrecargas (cambio de uso, baja estimación de los efectos, simplificaciones, variaciones en el proceso constructivo, etc…) y posibles deficencias en la resistencia (dimensiones de elementos estructurales, materiales, etc..). 2.1 Generalidades El Diseño Estructural debe garantizar la seguridad sin importar la filosofía de diseño que se utilice. Los estados límite representan las condiciones de una estructura para las cuales deja de cumplirse el objetivo para el cual fueron diseñadas. Los estados límite se dividen en dos categorías principales: • Estados límite de resistencia • Estados límite de servicio 2.1 Generalidades Los estados límite de resistencia están relacionados con capacidad de carga, pandeo, fractura, fatiga, etc… Los estados límite de servicio están relacionados con deformaciones, vibraciones, agrietamientos, etc… 2.1 Generalidades En la figura se presenta la distribución probabilística de cargas (Q) y resistencias (R). Un estado límite de resistencia se alcanzará cuando la carga (Q) es mayor que la resistencia (R). 2.1 Generalidades En términos generales, la expresión que representa la seguridad estructural, puede ser escrita de la forma siguiente: (Ec. 1) 2.2 Estados límite (LRFD) La ecuación: fRnSgiQi representa el requisito de resistencia establecido por el LRFD, en donde: fRn: son las resistencias nominales (Rn) reducidas por el factor de reducción f. SgiQi : es la sumatoria de las cargas (Qi) afectadas por el factor de amplificación de cargas gi. 2.2 Estados límite (LRFD) La sumatoria de las cargas amplificadas (SgiQi) contempla cualquier posible combinación de carga, y el factor de carga a utilizar (gi) dependerá de la combinación por estudiar. Así por ejemplo en el código mexicano, se utiliza un factor de carga igual a 1.1 para aquellas combinaciones que consideran cargas gravitaciones y cargas accidentales (viento, sismo, granizo, etc..), mientras que el factor de carga es igual a 1.4 para combinaciones que sólo involucran cargas gravitacionales. 2.2 Estados límite (LRFD) Otros códigos establecen combinaciones diferentes. Por ejemplo, el AISC LRFD: 1.4D 1.2D + 1.6L + 0.5(Lr o S o R) 1.2D + 1.6(Lr o S o R) + (0.5L o 0.8W) 1.2D + 1.3W + 0.5L + 0.5(Lr o S o R) 1.2D ± 1.0E + 0.5L + 0.2S 0.9D ± (1.3W o 1.0E) (D: carga muerta; L: carga viva; Lr: carga viva en cubierta; W: viento; S: nieve; E: sismo; R: hielo) 2.3 Esfuerzos permisibles ASD La ecuación 1 puede formularse de la siguiente forma: Esta filosofía supone que todas las cargas tienen el mismo promedio de variabilidad. Las posibles variaciones se consideran concentradas exclusivamente en la parte correspondiente a resistencias. 2.3 Esfuerzosd permissible ASD Se puede considerar que la ecuación anterior representa la resistencia nominal dividida por un factor de seguridad: Donde FS=g/f. El término Diseño por Esfuerzos Permisibles, implica comportamiento elástico. 2.4 Diseño plástico Se puede considerar que el “diseño plástico” es un caso especial de los estados límite, para el cual toda la sección transversal ha alcanzado el esfuerzo de fluencia Fy. Este método permite encontrar la capacidad de carga de la estructura y no solamente de los miembros como elementos aislados. 2.4 Diseño plástico F F AP MECANISM O DE COLAPSO CARGA MONOTÓNICAMENTE CRECIENTE F R LRFD R ASD GRÁFICA CARGADEFORMACIÓN d 2.5 Factores de seguridad Concepto de seguridad: En un principio el concepto de seguridad estaba incluido implícitamente en la experiencia e intuición del diseñador. Al incluirse la teoría de la elasticidad, el concepto de seguridad se expresaba formalmente en el coeficiente de seguridad y en los esfuerzos permisibles asociados. El conocimiento de las propiedades de los materiales se asoció con una mejoría del comportamiento estructural. 2.5 Factores de seguridad Sin embargo, no se tiene un conocimiento sobre el grado de seguridad real de la estructura. Para poder definir la seguridad real de la estructura, hay que considerar que las cargas, las propiedades geométricas de las secciones, las propiedades mecánicas de los materiales y la calidad de construcción son cantidades variables. 2.5 Factores de seguridad Con todo esto en mente, será posible establecer que el diseño estructural debe basarse necesariamente, en un concepto de seguridad que incluya la probabilidad de falla. Debido a la dificultad actual de usar métodos probabilísticos, se han desarrollado procedimientos que conservan las formas tradicionales y permiten incorporar aspectos estadísticos de resistencia, cargas, geometría, etc…. 2.5 Factores de seguridad (ASD) Se puede establecer que la mínima resistencia debe superar a la máxima carga aplicada por una cierta cantidad prescrita. Sea: Rn-DRn = Q + DQ Rn(1-DRn/Rn) = Q(1+DQ/Q) Definiendo el factor de seguridad FS como el cociente entre la resistencia nominal (Rn) y la carga nominal (Q), se tiene: 2.5 Factores de seguridad (ASD) FS= Rn/Q= [(1+DQ/Q)/ (1-DRn/Rn)] Considerando un posible incremento de carga del 40% respecto a la carga nominal (DQ/Q), y una reducción de la resistencia del 15% con respecto a la resistencia nominal (DRn/Rn), se tendría un FS= 1.65. Aunque el cálculo anterior es una simplificación, representa una forma de obtener el FS= 1.67 usado en el ASD. 2.5 Factores de seguridad (ASD) Los valores que pueden estimarse como factores de seguridad en el ASD son: - Para tensión y flexión: 1.67 - Para columnas cortas: 1.67 - Para columnas largas: 1.92 - Para conexiones: 2.5 a 3.0 2.5 Factores de seguridad (LRFD) En este procedimiento, parte del factor de seguridad está asociado al factor de carga (gi) que depende del tipo de carga y de la combinación considerada. fRnSgiQi La otra parte del factor de seguridad está asociada al factor de reducción de resistencia (f), que depende del tipo de elemento y del estado límite considerado. 2.5 Factores de seguridad (LRFD) Algunos factores f representativos son: Miembros a tensión: f= 0.90 para fluencia f= 0.75 para fractura Miembros a compresión: f= 0.85 Trabes: f= 0.90 2.5 Factores de seguridad (LRFD) La figura muestra que cuando ln(R/Q) < 0 se ha alcanzado el estado límite, y el área sombreada es la probabilidad de ocurrencia. El margen de seguridad está dado por la distancia del origen a la media representado por bsln(R/Q), siendo b el índice de confiabilidad. Comentarios LRFD vs ASD • LRFD es un método más racional que permite aprovechar más al material y por lo tanto redundar en un diseño más económico. • Se conoce más sobre las propiedades de los materiales y su comportamiento, que sobre las cargas y sus variaciones, por lo que la separación de los factores que las afectan resulta más lógico. • Se obtiene un diseño más seguro debido a que el propio método previene sobre el comportamiento estructural. Comentarios LRFD vs ASD • El objetivo principal del LRFD es dar una confiabilidad uniforme para la estructura bajo diferentes condiciones de carga. Esta uniformidad no puede obtenerse con el procedimiento establecido por el ASD. • En el ASD, al no usar cargas factorizadas y usar un mismo factor de seguridad aplicado a la resistencia, no se puede obtener la uniformidad deseable debido a la gran variación en cierto tipo de cargas (carga viva, cargas accidentales, etc…) 3. CALCULO DE CAPACIDADES 3.1 Tensión 3.2 Compresión 3.3 Flexión 3.1 TENSION Tensión - Area gruesa Area neta Area efectiva Resistencia 3.1 Tensión. Area gruesa (Ag) = area total de la sección transversal Area neta (An) y area neta efectiva (Ae) = area total – deducciones debidas a la presencia de agujeros y otros factores. El ancho de los agujeros se toma 1.5 mm mayor que el diámetro nominal del agujero. En líneas en diagonal se restan los anchos de los agujeros y se suma para cada espacio s2/4g 3.1 Tensión Cuando existe excentricidad en la conexión, se hace la siguiente deducción: Ae= UAn donde: U= 1 –x/L < 0.9 siendo: x: excentricidad de la conexión L: longitud de la conexión en la dirección de la carga 3.1 Tensión Posibles trayectorias de falla en una placa agujerada en tensión 3.1 Tensión Excentricidad en la conexión Determinación de x 3.1 Tensión Determinación de x 3.1 Tensión De acuerdo al LRFD: ft Tn ≥ Tu Se deben revisar dos condiciones de resistencia: Fluencia en la sección gruesa f Tn = f Fy Ag = 0.9 Fy Ag Fractura en la sección neta f Tn = f Fu Ae = 0.75 Fu Ae 3.1 Tensión Revisión del bloque de cortante: - Fluencia a cortante – fractura a tensión (FuAnt ≥ 0.6FuAnv): Tn = 0.6 Fy Agv + Fu Ant - Fractura a cortante – fluencia a tensión (FuAnt < 0.6FuAnv): Tn = 0.6 Fu Anv + Fy Agt 3.2 Compresión Ecuación de pandeo elástico de Euler En cualquier punto z, el momento flexionante en la barra ligeramente deformada es: Mz= Py y dado que: y P P y z y z 3.2 Compresión La ecuación diferencial resulta: haciendo n2=P/EI, la solución de esta ecuación diferencial lineal de segundo orden, puede expresarse como: y= A sen(nz) + B cos(nz) 3.2 Compresión Estableciendo iniciales: las siguientes condiciones (a) y= 0 para z= 0 (b) y= 0 para z= L Se obtiene la carga de pandeo crítico de Euler para una columna biarticulada en sus extremos: Pcr= π2EI/L2 3.2 Compresión O bien, esfuerzos: en Fe= ya que 2 r términos 2 2 π E/(L/r) = I/A de 3.3 Compresión Resistencia a compresión – LRFD Norma AISI 2016: Para λc 1.5: Fcr= Fy. (0.658 )^λ2 Para λc > 1.5: Fcr= (0.877/ λ2)Fy λc 2 = Fy/Fe IFB EFB 3.2 Compresión Resistencia a compresión – LRFD AISC 2016: Para Fe > 0.44Fy: Para Fe < 0.44Fy: Fcr=Fy.(0.658 )^(Fy/Fe) Fcr= 0.877Fe IFB EFB 3.2 Compresión Resistencia a compresión – ASD 2005 : Para KL/r < Cc: Para KL/r > Cc: donde: 3.2 Compresión La ecuación se la puede expresar exponencialmente Fcr= Fy. (e)-0.0424(Fy/E)(KL/r) Fcr= Fy. (e)-0.0424(π)^2. (Fy/Fe) Fcr= Fy. (e)-0.419. (Fy/Fe) Fcr= Fy. 0.658 (fy/fe) λ2 = Fy/Fe 3.2 Compresión 3000 ESFUERZOS DE PANDEO FLEXURAL. FB Esfuerzo (kg/cm2) 2500 IFB Fn= Fy.0.658^(Fy/Fe) 2000 Norma AISC 360.16 1500 0.444 Fy 1000 Fn = 0.877 Fe 500 EFB 0 0 50 100 Cc 150 Esbeltez KL/r 200 250 3.3 FLEXION Flexión - Vigas soportadas lateralmente - Resistencia 3.3 Flexión Vigas soportadas lateralmente Cuando las vigas tienen estabilidad lateral adecuada para el patín a compresión, el único estado límite de estabilidad que puede evitar que se alcance el máximo momento resistente, es el pandeo local del patín a compresión o del alma. 3.3 Flexión Distribución típica de esfuerzos en una sección I sujeta a momento flexionante creciente. Comportamiento elasto plástico 3.3 Flexión Cuando la fibra extrema alcanza el esfuerzo de fluencia Fy, se tiene el momento resistente de fluencia My = Sx Fy en donde Sx es el módulo de sección elástico (Sx= Ix/c) Cuando el esfuezo Fy se presenta en toda la sección, se alcanza el momento resistente plástico Mp = Zx Fy en donde Zx es el módulo de sección plástico (Zx= Fy AydA) 3.3 Flexión. Comportamiento elasto-plástico 3.3 Flexión Y Se define como factor de forma x= Mp/My = Z/S El factor de forma x es una propiedad de la sección transversal y es independiente del material. Para perfiles laminados tipo W, flexionados alrededor del eje x-x, el factor de forma varía entre 1.09 y 1.18. x 3.3 Flexión Conservadoramente se puede establecer que para secciones W con flexión alrededor del eje x-x, el momento plástico resistente Mp es por lo menos 10% mayor que el momento elástcio My. Se ha comprobado extensamene que cuando se impide el pandeo por torsión lateral y el pandeo local, se alcanza la plastificación total de la sección y por lo tanto el momento plástico Mp. 3.3 Flexión Una vez que se alcanza el momento Mp, la sección rota libremente manteniendo la resistencia Mp, es decir, se forma una articulación plástica. En una estructura isostática, la formación de una articulación plástica forma un mecanismo de colapso. M Carga de servicio Mp My Carga última Mw Qu Qy Qu Q 3.3 Flexión RESISTENCIA DE SOPORTADAS – LRFD VIGAS LATERALMENTE fb Mn Mu fb Mn: representa las resistencias reducidas Mu: representa las cargas amplificadas por los factores de carga correspondientes fb = 0.90 Mn: depende de las relaciones ancho/espesor de las placas que forman la sección. 3.3 Flexión, pandeo local Para secciones compactas: Mn= Mp = ZFy Para secciones no compactas: Mn= Mr = (Fy – Fr) S Para secciones parcialmente compactas: Interpolar linealmente entre Mp y Mr Mn= Mp – (Mp – Mr) [(l – lp)/(lr – lp)] Mp 3.3 Flexión, pandeo local RELACIONES ANCHO/ESPESOR, Pandeo Local 2005: Secciones compactas (lp): - Patines: bt/2tf 65/√Fy - Alma: h/tw 640/√Fy Secciones no compactas (lr): - Patines: bt/2tf 141/√(Fy-10) - Alma: h/tw Fy (ksi) 36 50 970/√Fy Secciones compactas Secciones no compactas Patines Alma Patines Alma 10.8 9.2 107 90.5 27.7 22.3 161.7 137.2 3.3 Flexión RESISTENCIA DE SOPORTADAS – ASD VIGAS LATERALMENTE Mn /FSSMactuantes En términos de esfuerzos ASD: fb= M/S Fb fb: esfuerzo actuante bajo cargas de servicio M: momento de servicio actuante S: módulo de sección elástico Fb: esfuerzo permisible 3.3 Flexión Para secciones compactas: Mn= S Fb - para flexión alrededor del eje X: Fb = 0.66 Fy - para flexión alrededor del eje Y: Fb = 0.75 Fy Para secciones no compactas: Fb = 0.60 Fy Para secciones parcialmente compactas se podrá interpolar linealmente. 3.3.1 PANDEO LATERAL DE VIGAS Pandeo lateral Resistencia a flexión Resistencia a cortante 3.3.1 Pandeo lateral Cualquier viga apoyada en los extremos y cargada en el plano del alma, puede pandearse lateralmente, excepto cuando el fenómeno se impide por elementos exteriores. Cuando el momento de inercia en el plano de carga es mucho mayor que el momento de inercia ortogonal, el pandeo lateral y el colapso, se presentan mucho antes de que los esfuerzos por flexión alcancen el límite de fluencia. 3.3.1 Pandeo lateral Pandeo lateral de un voladizo Similitud entre el pandeo de un puntal a compresión y una viga a flexión 3.3.1 Pandeo lateral Posición deformada de la trabe Momentos en la trabe adicionales 3.3.1 Pandeo lateral Reducción de Mr a medida que crece L sin soporte lateral 3.3.1 Pandeo lateral LTB En la figura siguiente se presentan 4 categorías del comportamiento: M 1. PLASTICO Mp Mp 2. INELASTICO ILTB My M M 3. INELASTICO ILB Mr 4. ELASTICO D ELTB D 3.3.1 Pandeo lateral 1.- Se alcanza el momento plástico Mp con el desarrollo de una gran deformación D. M 1. PLASTICO Mp My 2. INELASTICO 3. INELASTICO Mr 4. ELASTICO D Hay una gran capacidad de rotación debido a que el patín no presenta inestabilidad. 3.3.1 Pandeo lateral 2.- Se alcanza Mp pero con una pequeña capacidad de rotación, debido a pandeo local del patín a compresión y/o del alma, o por pandeo lateral. El patín tiene comportamiento inelástico. M 1. PLASTICO Mp My 2. INELASTICO 3. INELASTICO Mr 4. ELASTICO D 3.3.1 Pandeo lateral 3.Se inicia el comportamiento inelástico, sin embargo, el pandeo local o el pandeo lateral impiden alcanzar Mp. M 1. PLASTICO Mp 2. INELASTICO My 3. INELASTICO Mr 4. ELASTICO D 3.3.1 Pandeo lateral 4.- Se tiene comportamiento elástico y el momento crítico Mcr es definido por el pandeo elástico (pandeo local del alma o patín ó pandeo lateral). M 1. PLASTICO Mp My 2. INELASTICO 3. INELASTICO Mr 4. ELASTICO D 3.3.1 Pandeo lateral U v f La deformación vertical “v” se presenta desde el inicio de la carga, pero el desplazamiento lateral “u” y el giro “f”, se presentan hasta que el momento alcanza cierto valor crítico. 3.3.1 Pandeo lateral Debido a la deformación lateral y al pandeo, se presentan flexiones laterales y momentos torsionantes. M Interesa conocer el momento para el cual se presenta la bifurcación del equilibrio. La solución del problema permite determinar el momento crítico para el cual se presenta el pandeo lateral. Mo, cr U, f 3.3.1 Pandeo lateral El momento crítico para el cual se presenta el pandeo lateral es igual a: 2 π M cr E I y G K t E 2 Ca 2 I y L L La resistencia a flexotorsión tiene dos partes: • Capacidad a soportar torsión pura (Saint Venant) • Oposición de los patines a flexionarse lateralmente, es decir, capacidad a la torsión por el alabeo 3.3.2 Pandeo local En la figura siguiente se presentan 4 categorías del comportamiento: M 1. Sísmicamente compacto HD φMp Mp My 2. Compacto MD Mp 3. No compacto LD ρMy Mcr 4. Esbelto M M D ηMy D 3.3.3 Resistencia a flexión La resistencia de diseño de miembros en flexión cuyas secciones están provistas de soportes laterales con separaciones mayores que Lu, es igual a: a) Secciones tipo 1 y 2 (dos ejes de simetría, flexionadas alrededor del eje de mayor momento de inercia): 2 Si M u M p 3 0.28M p φM p M r 1.15 φM p 1 Mu 2 Si M u M p 3 M r φM u 3.3.3 Resistencia a flexión En vigas de sección transversal I o H (laminadas o hechas de tres placas), el momento resistente nominal de la sección, cuando el pandeo lateral se inicia en el intervalo elástico, es: E Mu EI y GJ I y C a CL L 2 E 2 J Iy ( ) Ca CL 2 .6 L 3.3.3 Resistencia a flexión donde: f: factor de resistencia = 0.9 I y: momento de inercia respecto al eje de simetría situado en el plano del alma J: constante de torsión de Saint Venant Ca: constante de torsión por alabeo 3.3.3 Resistencia a flexión C puede tomarse conservadoramente igual a 1.0, o bien se calcula como: C= 0.6 + 0.4 M1/M2 (en curvatura simple) C= 0.6 - 0.4 M1/M2 0.4 (en curvatura doble) C= 1.0 cuando el momento flexionante en cualquier sección es mayor que M2 M1 y M2: respectivamente el menor y mayor de los momentos en los extremos del tramo 3.3.3 Resistencia a flexión Cálculo de Lu arriostre de plastificacion, y Lr arriostre de pandeo lateral elástico 1.- Miembros de sección transversal I: 2π E Ca Lu Xu GJ 1 1 Xu X u 3.220 X r 2 2π E Ca Lr Xr GJ 4 Z Fy Xr C 3 GJ 1 1 Xr Ca Iy 2 3.3.3 Resistencia a flexión Cálculo de Lu y Lr: 2.- Miembros de sección transversal rectangular (maciza o hueca): E L u 0.91 C Z Fy Iy J E= 2’040,000 kg/cm2 G= 784,000 kg/cm2 L r 3.22 L u 3.3.3 Resistencia a flexión b) Secciones tipo 3: 2 Si M u M y 3 2 Si M u M y 3 0.28 M y φ M y M r 1.15 φ M y 1 Mu Mr φ Mu 3.3.4 Resistencia a cortante La resistencia de diseño al cortante de vigas de eje recto, sección transversal constante y con dos ejes de simetría es: VR= f VN donde: f : factor de resistencia = 0.9 VN: resistencia nominal 3.3.4 Resistencia a cortante La resistencia nominal depende de la relación peralte/grueso del alma sometida a cortante, ya que esta relación determina el tipo de comportamiento de la sección: • Falla a cortante en el intervalo de endurecimiento por deformación • Falla por plastificación del alma a cortante • Inicio de pandeo del alma • Falla por tensión diagonal 3.3.4 Resistencia a cortante a) Falla por cortante en el intervalo de endurecimiento por deformación: si h E k 0.98 t Fy VN= 0.66 Fy Aa 3.3.4 Resistencia a cortante b) Plastificación del alma por cortante: Ek h Ek si 0.98 1.12 Fy t Fy 0.65 E Fy k VN Aa h t 3.3.4 Resistencia a cortante c) si E k h E k 1.12 1.40 Fy t Fy Se consideran dos casos: c.1) Inicio del pandeo del alma c.2) Falla por tensión diagonal 0.65 E F k y VN h t 0.65 E Fy k VN Aa h t 1 0.870 2 1 a / h 0.50 Fy 2 1 a / h Aa 3.3.4 Resistencia a cortante d) E k h 1.40 Fy t si Se consideran dos casos: d.1) Inicio del pandeo del alma 0.905 E k VN Aa 2 h t d.2) Falla por tensión diagonal 0.905 E k 0.870 VN 1 2 2 h 1 a / h t 0 . 50 F y A a 2 1 a / h Resistencia a cortante Para que pueda considerarse como estado límite la falla por tensión diagonal, la sección debe tener una sola alma y estar reforzada con atiesadores transversales. Además, a/h no debe exceder de 3.0 ni de [260/(h/t)]2. Resistencia a cortante Aa: área del alma = t d d: peralte total de la sección h: peralte del alma t: grueso del alma a: separación entre atiesadores k= 5.0 + 5.0/(a/h)2 k se toma igual a 5.0 cuando a/h es mayor que 3.0 o que [260/(h/t)]2, y cuando no se usan atiesadores. En almas no atiesadas h/t < 260. 3.3.5 Resistencia a cortante, Norma AISC 360 -16 k= 5.0 + 5.0/(a/h)2 a distancia entre atiesadores •A) Falla a cortante en el intervalo de endurecimiento por deformación si h 0.98 t E kv F y Vn 0.66.Aw.Fy •B) Falla por plastificación del alma a cortante si 0.98 E kv h 1.12 Fy t E kv Fy V n 0.65 •C.1) Inicio de pandeo del alma si 1.40 E kv h Fy t Vn 0.905 E kv Aw 2 h t •C.2) Falla por tensión diagonal 1 0.65 Ekv /F 0.870 y VN 1 2 h 1 a / h t •D.1) Inicio de pandeo del alma E kv h si 1.40 Fy t 0.50 Fy 2 1 a / h Vn Aw 0.905 E kv Aw 2 h t •D.2) Falla por tensión diagonal 2 VN 0.905 E kv 2 h t 1 0.870 1 a / h 2 0.50 Fy 1 a / h 2 A w Ekv/ Fy Aw h t 3.3.5 Resistencia a cortante, NORMA AISC 360-16 k= 5.0 + 5.0/(a/h)2 si 2.24 E Fy a distancia entre atiesadores si 1.10 E kv h Fy t si 1.10 E kv h Fy t h t Campo de tension diagonal, si 2Aw 2.5 Afc Aft y h/bf 6 v 1 v 1.5 Vn 0.6FyAwCv Cv 1.0 Cv 1.10 Ekv/Fy h t si 1.10 a/h <3 Vn 0.6FyAw( Vn 0.6FyAw( si 1.10 E kv h 1.37 Fy t si 1.37 E kv h Fy t E kv h Fy t 1 - Cv2 Cv2) 1.15 1 (a/h)2 1 - Cv2 Cv2) 1.15(a/h 1 (a/h)2 E kv Fy Cv2 Cv2 1.51 Ekv 2 h .Fy t 1.10 E kv/Fy h t 4. PRINCIPIOS DE DISEÑO PLASTICO Desde el punto de vista práctico, la mayoría de los diseños utilizan las propiedades plásticas de la sección y se basan en análisis elásticos, de manera tal que el diseño está controlado más por la resistencia de los elementos que por la resistencia global de la estructura. 4. PRINCIPIOS DE DISEÑO PLASTICO Las hipótesis que se usarán para análisis plásticos simplificados son: • La plastificación en un elemento ocurre solamente en la articulación plástica y se idealizan como perfectamente rígido-plástico, de longitud cero y capacidad Mp. • Se aplica la teoría de pequeñas deformaciones y no se considera la no linealidad geométrica. • Se desprecian los efectos de endurecimiento por deformación. • Se considera arriostramiento adecuado en los elementos para evitar inestabilidad por pandeo local o pandeo por torsión lateral. • Las articulaciones plásticas pueden soportar grandes deformaciones plásticas. • Se considera que las cargas se aplican de forma monotónicamente creciente. 4. PRINCIPIOS DE DISEÑO PLASTICO Existen tres métodos para calcular la capacidad de carga última de una estructura usando análisis plásticos: - Método estático. Es un método de equilibrio en el cual se propone un estado de equilibrio admisible como posible solución. - Método de trabajo virtual. Es un método cinemático en el cual se propone un mecanismo de colapso como posible solución. - Método paso a paso. Es un método sistemático que considera los cambios en la estructura a medida que incrementa la carga. 4.1 PRINCIPIOS DE DISEÑO PLASTICO Teoremas fundamentales del análisis plástico: - Teorema del límite inferior. - Teorema del límite superior. - Teorema de unicidad. 4.1.1 TEOREMA DEL LIMITE INFERIOR Teorema del límite inferior. “La carga correspondiente a un diagrama de momentos que satisfaga la condición de equilibrio, trazado dándoles valores arbitrarios a las incógnitas hiperestáticas, es menor que la de colapso de la estructura, o a la sumo, igual a ella, siempre que el momento flexionante no sea en ningua sección, mayor que el momento plástico correspondiente”. 4.1.1 TEOREMA DEL LIMITE INFERIOR Teorema del límite inferior (cont.). En una estructura hiperestática puede haber infinidad de diagramas de momento que satisfacen el equilibrio al inventarse los valores de las incógnitas hiperestáticas. Además, se pueden escoger dimensiones de los miembros de manera que se satisfacen condiciones de plasticidad, pero puede no cumplirse la condición de mecanismo. 4.1.2 TEOREMA DEL LIMITE SUPERiOR Teorema del límite superior. “La carga correspondiente a un mecanismo supuesto es mayor que la de colapso de la estructura, o a lo sumo igual a ella”. Se pueden obtener soluciones que satisfacen la condición de mecanismo de colpaso y de equilibrio, pero no satisfacen la condición de plasticidad. 4.1.3 TEOREMA DE LA UNICIDAD Teorema de unicidad. “Si para una estructura dada, sometida a un sistema de cargas definidas, es posible encontrar cuando menos un diagrama de momentos que satisfaga simultáneamente las condiciones de equilibrio, mecanismos y plasticidad, las cargas consideradas son, necesariamente, las de colapso”. 4. PRINCIPIOS DE DISEÑO PLASTICO