Ondas Estacionarias en una Cuerda: Práctica de Laboratorio
Anuncio

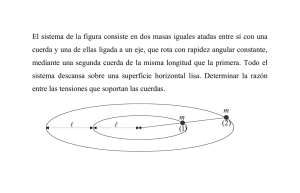
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA Y ELÉCTRICA UNIDAD ZACATENCO INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA ONDAS MECÁNICAS PRÁCTICA ONDAS ESTACIONARIAS EN UNA CUERDA EQUIPO 1 Integrantes: Rodríguez Correa Luis Fernando Rosas Camerino Nataly Anastacia Samanta Olivares Morales Emanuel Jairo Fecha de entrega: 16-enero-2023 OBJETIVO MATERIALES - 2 Cuerdas Transformador 115 V/ 230 V 230 A Transformador de pruebas Motor de 13000 rpm Estroboscópico Báscula Elástico flexómetro PROCEDIMIENTO Como el sistema que íbamos a utilizar ya estaba armado. Medimos individual y posteriormente ya en el sistema, la cuerda y el elástico con ayuda del flexómetro. Además de pesar el elástico y la cuerda con ayuda de la báscula. Los datos obtenidos se encuentran en la tabla I. TABLA I Materiales Masa 1.9 g Longitud individual 28.1 cm Longitud en el sistema 517.4 cm Elástico Cuerda 1 2.2 g 33.4 cm Cuerda 2 2.2 g 33.4 cm 40.8 cm Conexión: motor, cuerda y elástico. (imagen 1) 40.8 cm Conexión: elástico, cuerda, tubo fijo (imagen 2) Imagen 1. Conexión de cuerda 1. Imagen 2. Conexión de cuerda 2. Ahora colocamos una frecuencia en el transformador de pruebas, la cuál también se verá reflejada en eltTransformador 115 V/ 230 V 230 A. Esto para generar ondas con nodos y antinodos respectivamente, como se muestra en el vídeo del siguiente link. Y anotamos los datos en la tabla II. https://youtu.be/dPylwL_lqsc TABLA II Nodos 9 nodos 7 nodos frecuencia 384 6.4 unidades 1/min 1/s CÁLCULO DE LA VELOCIDAD DE LA ONDA 𝐹 𝑉=√ 𝜇 𝑚𝑎𝑠𝑎 Donde 𝜇 = 𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑 , 𝐹 = 𝑚𝑎 = 𝜇𝑅𝜃 𝑣2 𝑅 = 𝜇𝑣 2 y 𝑚 = 𝜇∆𝑆 Calculando 𝜇𝑐𝑢𝑒𝑟𝑑𝑎 = 0.0022 𝑘𝑔 𝑘𝑔 = 0.00658 0.334 𝑚 𝑚 𝜇𝑒𝑙á𝑠𝑡𝑖𝑐𝑜 = 0.0019 𝑘𝑔 𝑘𝑔 = 0.00673 0.282 𝑚 𝑚 ∴ 𝜇 = 0.00658 + 0.00673 = 0.01331 𝐹𝑐𝑢𝑒𝑟𝑑𝑎 = 𝐹𝑒𝑙á𝑠𝑡𝑖𝑐𝑜 = 𝑘𝑔 𝑚 ∴𝑉=√ 𝐹𝑐𝑢𝑒𝑟𝑑𝑎 + 𝐹𝑒𝑙á𝑠𝑡𝑖𝑐𝑜 𝐹 =√ = 𝜇 0.01331 𝑚/𝑠 CARACTERÍSTICAS FISICAS Y ELÉCTRICAS DE LOS APARATOS UTILIZADOS 1. Motor de corriente continúa El motor de corriente continua, es una máquina que convierte energía eléctrica en energía mecánica, provocando un movimiento rotario, gracias a la acción del campo magnético. Los componentes de un motor de corriente continua se dividen en dos partes: 1. Estator: parte que da soporte mecánico al aparato y contiene los polos de la máquina. 2. Rotor: es un componente generalmente de forma cilíndrica, alimentado de corriente continua a través del colector formado por delgas. Las delgas se fabrican generalmente de cobre y están en contacto alternante con las escobillas fijas. Esta máquina de corriente continua es una de las más versátiles en la industria, su fácil control de posición como de paro y velocidad la han convertido en una de las mejores opciones en aplicación de control y automatización de procesos. Según la Ley de Lorentz, cuando un conductor pasa por una corriente eléctrica se sumerge en un campo magnético, el conductor sufre una fuerza perpendicular al plano formado por el campo magnético y la corriente. Fuerza contraelectromotriz inducida en un motor Es la tensión que se crea en los conductores de un motor, como consecuencia de cortes de línea de fuerza, es el efecto generado de pines. Las fuertes puntas de corriente de un motor en el arranque son debidas a que, con la máquina parado, no hay fuerza contraelectromotriz y el bobinado se comporta como una resistencia pura del circuito. Número de escobillas Las escobillas deben poner en cortocircuito todas las bobinas situadas en la zona neutral. Si la máquina tiene dos polos, tenemos también dos zonas neutras. En consecuencia, el número total de escobillas ha de ser igual al número de polos de la máquina. Sentido de giro El sentido de giro de un motor de corriente continua depende del sentido relativo de las corrientes circulantes por los devanados inductor e inducido. La inversión del sentido de giro del motor de corriente continua se consigue invirtiendo el sentido del campo magnético o de la corriente del inducido. Reversibilidad Los motores y los generadores de corriente continua están constituidos por los mismos elementos, diferenciándose en la forma de utilización. Por reversibilidad entre el motor y el generador se entiende que, si se hace girar al rotor, se produce en el devanado inducido una fuerza electromotriz capaz de transformarse en energía en el circuito de carga. En cambio, si se aplica una tensión continua al devanado inducido del generador a través del colector de delgas, el comportamiento de la máquina ahora es de motor, capaz de transformar la fuerza contraelectromotriz en energía mecánica. 2. Transformador de Energía Un transformador es una máquina eléctrica que, basándose en los principios de inducción electromagnética, transfiere energía de un circuito eléctrico a otro, sin cambiar la frecuencia. La transferencia se lleva a cabo con el cambio de voltaje y corriente. Un transformador aumenta o disminuye la corriente alterna cuando es necesario. Estas máquinas ayudan a mejorar la seguridad y eficiencia de los sistemas de energía durante su distribución y regulación a través de largas distancias. Los tres componentes más importantes de un transformador son el núcleo magnético, el devanado principal y el secundario Núcleo magnético El núcleo de los transformadores está formado por chapas de acero al silicio aisladas entre ellas. Están compuestos por dos partes principales: las columnas, que es la parte donde se montan los devanados, y las culatas, que es la parte donde se realiza la unión entre las columnas. El núcleo se utiliza para conducir el flujo magnético Devanado principal El devanado principal es la parte que está conectada a una fuente eléctrica, de donde se produce el flujo magnético inicialmente (El devanado que suministra energía). Devanado secundario El devanado secundario es la bobina que suministra la energía a una tensión transformada o cambiada a la carga (El devano por donde sale la energía). Todos los transformadores comparten varias características sin importar su tipo: La frecuencia de energía de entrada y salida es la misma. Todos se rigen por las leyes de la inducción electromagnética. Las bobinas primarias y secundarias no cuentan con conexión eléctrica (excepto por los transformadores automáticos) 3. Bascula Una balanza digital es un instrumento de medición que cuenta con un sistema de calibrado con dispositivos electrónicos. Significa que es un instrumento que se programa mediante un software que gestiona cada una de sus funcionalidades. Además, estos modelos de balanzas son mucho más precisos para ejecutar mediciones de unidades de medida pequeña Plato Parte superficial en el que se coloca aquello que será pesado. Adaptador Fuente de alimentación de la báscula. Puede ser por electricidad, pilas o baterías. Pies y soportes Ayudan a mantener equilibrada la báscula. Software Sistema o programa que permite el funcionamiento inteligente del artefacto. Hay más simples y otros más complejos que además proporcionan fecha, índices de masa corporal, etc. Estabilizador Sistema que indica cuándo la báscula se encuentra lo suficientemente equilibrada para poder pesar. Teclado Aunque algunas ya no lo tienen, pues se activan y desactivan sólo con los sensores, las botoneras se incluyen según modelo y funcionalidades Fórmula para el cálculo de motores de corriente continua 𝑭 = 𝑩. 𝒍. 𝑰 1. 2. 3. 4. F: Fuerza en Newtons I: Intensidad que recorre el conductor en amperios. l: Longitud del conductor en metros. B: densidad del campo magnético o densidad de flujo, se mide en teslas. CONCLUSIÓN