“AÑO DEL BICENTENARIO DEL PERÚ: 200 AÑOS DE
INDEPENDENCIA”
ELEMENTOS DE MAQUINAS Y
FUNDAMENTOS DE DISEÑO
AVANCE N°1
“MAQUINA CORTADORA POR VETAS”
Integrantes:
Abigail Sánchez Gonzales u17203743
Enrique Arce Reyes 0912121
Edwin Moreno Huaynacaque 1411843
Raúl Enmanuel Angeles Orahulio 1520752
Profesora: Ing. Claudia Verónica Galagarza Alvarez
Sección: 16665
Octubre – 2021
INDICE
1. SITUACIÓN PROBLEMÁTICA……………………………………….……...3
1.1. Planteamiento del problema……………………………………………….…...3
2. CONCEPTO DE SOLUCION……………………………………………....3
2.1. Propuesta de maquina cortadora………………………………………………...3
3. PROCEDIMIENTO DE DISEÑO……………………………………………...3
3.1. Diseño de eslabones……………………………………...…………...………...3
3.2. Diseño de caja de engranajes…………………………………………………...3
3.3. Diseño de motor………………………………………………………………3
3.4. Ensamblaje del mecanismo……………………………………………...……...4
4. MEMORIA DE CALCULO DEFINITIVA…………………………….……...4
4.1. Grado de movilidad………………………………………………...…………4
4.2. Síntesis grafica……………………………………………………….…………4
4.3. Análisis de posición…………………………………………………………......5
4.4. Análisis de velocidad……………………………………………………………5
4.5. Calculo de engranajes………………………………………………..……….....6
2
1. SITUACIÓN PROBLEMÁTICA
1.1. Planteamiento del problema
En nuestro país existen situaciones relacionadas con factores económicos que aquejan
a la población campesina; uno de ellos es la ineficiencia en la productividad de leña,
esto se basa en el poco presupuesto para el abastecimiento de máquinas para la
producción de la leña, los cuales son generadores de problemáticas para el avance de
económico y social de esa parte de la población. De esta manera se llega a formular la
siguiente pregunta: ¿Cómo mejoraríamos el abastecimiento de máquinas
cortadoras de leña en los campesinos del Perú?
2. CONCEPTO DE SOLUCIÓN
En este capítulo propondremos una alternativa de solución a nuestro problema. Pues
crearemos un mecanismo económico para ayudar al abastecimiento de máquinas
cortadoras de leña en los campesinos.
2.1. Propuesta de Maquina cortadora de troncos por vetas
En esta sección se introduce los distintos elementos para desarrollar la maquina
cortadora de troncos por vetas. Este mecanismo presenta eslabones, caja de
engranajes y motor. En donde utilizaremos los conceptos de movilidad y síntesis gráfica,
análisis de posición, análisis de velocidad en base a la teoría dada en el curso.
3.PROCEDIMIENTO DE DISEÑO
Nuestro proyecto tiene 4 partes en el diseño:
3.1. Diseño de eslabones
En el diseño de eslabones utilizaremos:
biela de 160 cm
manivela de 50 cm
guía 20cmx20cmx20 cm
embolo 160cmx 20cm x20cm
3.2. Diseño de caja de engranajes
En el diseño de caja de engranajes utilizaremos:
Un engranaje cilíndrico de 21 dientes rectos.
Un piñón de dos engranajes cilíndricos de 35 y 20dientes rectos.
Un engranaje cilíndrico de 55 dientes rectos.
3
3.3. Diseño de motor
Utilizaremos un motor de 1775 rpm
3.4. Ensamblaje del mecanismo
Ensamblaremos el mecanismo con los siguientes pasos:
I.
Introducimos el embolo en la guía
II.
Unimos la biela con la guía
III.
Unimos la guía con la manivela
IV.
Unimos la manivela a la caja de engranajes
V.
Conectamos un engranaje previsto para motor
VI.
Conectamos el motor a corriente
4.MEMORIA DE CALCULO DEFINITIVA
4.1. Grado de movilidad
m = 3(n − 1) − 2(j1) − j2
m = 3(4 − 1) − 2(4) − 0
m = 3(3) − 2(4) − 0
m=9−8
m=1
Es un mecanismo con 1 grado de libertad.
4.2. Síntesis grafica
4
4.3. Análisis de posición
Hallando la posición de B
160𝑐𝑚
𝑠𝑒𝑛60°
=
𝑥
𝑠𝑒𝑛
… … … ()
Además:
50(sen60°) = 160(sen)
= 1572 … … … ()
60° + + = 180°
= 104.28°
En ():
𝑥=
160𝑠𝑒𝑛(104.28°)
𝑠𝑒𝑛60°
𝐱 = 𝟏𝟕𝟗, 𝟎𝟒𝐢
4.4. Análisis de velocidad
Hallando VB
𝑊𝑏 = 387.273 𝑟𝑝𝑚 40.55 𝑟𝑎𝑑/𝑠
⃗𝐴 = 𝑊
⃗⃗⃗ 𝐴𝐵 𝑥 ⃗⃗𝑟𝐵 = (−40.55)𝑘(50𝑐𝑜𝑠60°𝑖 + 50𝑠𝑒𝑛30°𝑗)
𝑉
⃗ 𝐴 = (−40.55)𝑘 (25𝑖 + 43.30𝑗)
𝑉
5
⃗ 𝐴 = −1013.75𝑗 + 1755,815𝑖 … … … ()
𝑉
⃗ 𝐵/𝐴 = 𝑊
⃗⃗⃗ 𝐵𝐶 𝑥 ⃗⃗𝑟𝐶/𝐵 … … … (2)
𝑉
⃗𝐶 = 𝑉
⃗𝐵 + 𝑉
⃗ 𝐶/𝐵 … … … (3)
𝑉
⃗⃗𝑟𝐵 = 159,77𝑖 − 40,30𝑗
𝐴
⃗ 𝐵/𝐴 = 𝑊
⃗⃗⃗ 𝐴𝐵 𝑥 (159,77𝑖 − 40,30𝑗)
𝑉
⃗ 𝐵/𝐴 = (159,77𝑖(𝑊𝐴𝐵 )𝑗 − 40,30𝑗(𝑊𝐴𝐵 )𝑖
𝑉
𝑉𝐵 = 𝑉𝐵 𝑖 + 0𝑗
En (3):
⃗𝐵 = 𝑉
⃗𝐴 + 𝑉
⃗ 𝐵/𝐴
𝑉
⃗ 𝐵 𝑖 = −1013,75𝑗 + 1755,815𝑖 + 159,77(𝑊𝐴𝐵 )𝑗 + 40,30𝑗(𝑊𝐴𝐵 )𝑖
𝑉
(−1013,75 + 159,77(𝑊𝐴𝐵 )𝑗 = 0 𝑊𝐴𝐵 = 6,35 𝑟𝑎𝑑/𝑠
⃗ 𝐵 𝑖 = −1013,75𝑗 + 1755,815𝑖 + 159,77(6,35)𝑗 + 40,30𝑗(6,35)𝑖
𝑉
⃗ 𝐁 𝐢 = 𝟐𝟎𝟏𝟏, 𝟕𝟐𝐢
𝐕
4.5. Calculo de engranajes
N2=35
N1=21
N4=55
N3=20
6
Relación de transmisión:
𝑖=
𝑛1 𝐷𝑝1 𝑁2
=
=
𝑛2 𝐷𝑝2 𝑁1
El piñón n1, engrana con la corona 1, con los datos:
n1= 1775rpm
N1= 21 dientes
N2= 35 dientes
𝑛1 𝑁2
𝑛1 𝑥 𝑁1
1775 𝑥 21
=
𝑛2 =
𝑛2 =
𝑛2 = 1065 𝑟𝑝𝑚
𝑛2 𝑁1
𝑁2
35
El piñón n2, engrana con la corona 2, con los datos:
n1= 1065 rpm
N1= 20 dientes
N2= 55 dientes
𝑛2 =
𝑛1 𝑥 𝑁1
1065 𝑥 20
𝑛2 =
𝑛2 = 387.273 𝑟𝑝𝑚
𝑁2
55
Calculo de momentos torsores, sin considerar el rendimiento, con los datos:
N (potencia a transmitir) =20 CV
n1= 1775 rpm
𝑀𝑡 = 71620 𝑥
𝑁(𝐶𝑉)
𝑛(𝑟𝑝𝑚)
𝑀𝑡1 = 71620 𝑥
20(𝐶𝑉)
= 806.986 𝐾𝑔. 𝑐𝑚
1775(𝑟𝑝𝑚)
𝑀𝑡2 = 71620 𝑥
20(𝐶𝑉)
= 1344.977 𝐾𝑔. 𝑐𝑚
1065(𝑟𝑝𝑚)
𝑀𝑡2 = 71620 𝑥
20(𝐶𝑉)
= 3698.683 𝐾𝑔. 𝑐𝑚
387.273(𝑟𝑝𝑚)
Primero se determina el rpm de los ejes 1, 2 y 3:
Eje 1: n1 = 1775 rpm (dato)
Eje 2: n2 = 1065rpm
Eje 3: n3 = 387.273rpm
Se determinan los módulos mediante el diagrama
M1-2: módulo de piñón 1 y corona 2, se selecciona con los datos del piñón M1-2 = 3
M3-4: módulo de piñón 3 y corona 4, se selecciona con los datos del piñón M3-4 = 3.25
7
Se calculan los diámetros primitivos:
𝐷𝑝1 = 𝑁1 . 𝑀1−2 𝐷𝑝1 = 21 𝑥 3 = 63 𝑚𝑚
𝐷𝑝2 = 𝑁2 . 𝑀1−2 𝐷𝑝2 = 35 𝑥 3 = 105 𝑚𝑚
𝐷𝑝1 = 𝑁3 . 𝑀3−4 𝐷𝑝3 = 20 𝑥 3.25 = 65 𝑚𝑚
𝐷𝑝1 = 𝑁1 . 𝑀3−4 𝐷𝑝4 = 55 𝑥 3.25 = 178.75 𝑚𝑚
Se calculan los diámetros exteriores:
𝐷𝑒1 = 𝐷𝑝1 + 2 (𝑀) 𝐷𝑒1 = 63 + 2(3) = 69 𝑚𝑚
𝐷𝑒2 = 𝐷𝑝2 + 2 (𝑀) 𝐷𝑒2 = 105 + 2(3) = 111 𝑚𝑚
𝐷𝑒3 = 𝐷𝑝3 + 2 (𝑀) 𝐷𝑒3 = 65 + 2(3.25) = 71.5 𝑚𝑚
𝐷𝑒4 = 𝐷𝑝4 + 2 (𝑀) 𝐷𝑒4 = 178.75 + 2(3.25) = 185.25 𝑚𝑚
Se calculan los diámetros interiores:
𝐷𝑖1 = 𝐷𝑝1 − 2 (1.167)(𝑀) 𝐷𝑖1 = 63 − 2.334(3) = 55.998 𝑚𝑚
𝐷𝑖2 = 𝐷𝑝2 − 2 (1.167)(𝑀) 𝐷𝑖2 = 105 − 2.334(3) = 97.998 𝑚𝑚
𝐷𝑖3 = 𝐷𝑝3 − 2 (1.167)(𝑀) 𝐷𝑖3 = 65 − 2.334(3.25) = 57.4145 𝑚𝑚
𝐷𝑖4 = 𝐷𝑝4 − 2 (1.167)(𝑀) 𝐷𝑖4 = 178.75 − 2.334(3.25) = 171.1645 𝑚𝑚
8
Calculo de esfuerzos:
PIÑON 1
FORMULA
α
N1
n1
ᶇ1-2
m
Pot
h
Pc
e
De
Dp
Di
Pd
Ha
Hb
H
L
C
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
2.167*m
π*m
Pc/2
m*(N+2)
N*m
De-2h
N/Dp
1/Pd
1.167/Pd
0.167*m
(10a12)*m
(Dp1 - Dp2)/2
20°
21
1775
3
19.7Hp = 20CV = 14.69029Kw
6.501
9.425
4.712
69 mm
63mm
56mm
0.33
3.03
3.536
0.501
30
RUEDA 2
FORMULA
α
N2
n2
ᶇ1-2
m
Pot2
h
Pc
e
De
Dp
Di
Pd
Ha
Hb
H
L
C
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
(n1*N1)/N2
93%
Pot1*ᶇ1-2
2.167*m
π*m
Pc/2
m*(N+2)
N*m
De-2h
N/Dp
1/Pd
1.167/Pd
0.167*m
(10a12)*m
(Dp1 - Dp2)/2
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
20°
35
1065
0.93
3
18.32HP = 18.57 CV = 13.85Kw
6.501
9.425
4.712
111 mm
105 mm
98 mm
0.33
3.03
3.536
0.501
30
84 mm
9
FUERZAS APLICADAS A LOS ENGRANAJES :
FUERZA APLICADA EN EL PIÑON 1
FUERZA APLICADA EN EL ENGRANAJE 2
𝑀1
𝑟1
2𝜋𝑛1
𝑃𝑜𝑡1 = 𝑀1 𝑥
60
14.69
𝑀1 =
2𝜋 ∗ 1775
60
𝑀1
𝑟1
2𝜋𝑛1
𝑃𝑜𝑡1 = 𝑀1 𝑥
60
13.85
𝑀1 =
2𝜋 ∗ 1065
60
𝑀1 = 0.080 𝑁𝑚
𝑀1 = 0.1242𝑁𝑚
𝐹𝑡1 =
𝑟1 =
𝐷𝑝1
2
𝑟1 =
𝐷𝑝1
2
63
2
𝑟1 =
105
2
𝑟1 =
𝑟1 = 0.0315 𝑚
𝐹𝑡1 =
𝐹𝑡1 =
𝐹𝑡1 =
𝑀1
𝑟1
0.080
0.0315
𝑟1 = 0.0525 𝑚
𝐹𝑡1 =
𝐹𝑡1 =
𝑀1
𝑟1
0.1242
0.0525
𝐹𝑡1 = 2.54 𝑁
𝐹𝑡1 = 2.37𝑁
𝐹𝑟1 = 𝐹𝑡1 ∗ 𝑇𝑎𝑛 ∝
𝐹𝑟1 = 𝐹𝑡1 ∗ 𝑇𝑎𝑛 ∝
𝐹𝑟1 = 2.54 ∗ 𝑇𝑎𝑛20°
𝐹𝑟1 = 2.37 ∗ 𝑇𝑎𝑛20°
𝐹𝑟1 = 0.92 N
𝐹𝑟1 = 0.86 N
10
CARGA TRANSMITIDA A LOS
DIENTES DEL PIÑON 1
CARGA TRANSMITIDA A LOS
DIENTES DEL ENGRANAJE 2
𝑉𝑡 = ѡ 𝑥 𝑟
𝑉𝑡 = ѡ 𝑥 𝑟
𝑉𝑡
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠= 60 𝑥 𝑠 𝑥 2 𝑝𝑢𝑙𝑔 𝑥 12 𝑝𝑢𝑙𝑔 𝑥 1𝑚𝑖𝑛
=
𝑥 𝑥
𝑝𝑢𝑙𝑔 𝑥
𝑥
60
𝑠
2
12 𝑝𝑢𝑙𝑔 1𝑚𝑖𝑛
𝑉𝑡
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠
𝑉𝑡
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠= 60 𝑥 𝑠 𝑥 2 𝑝𝑢𝑙𝑔 𝑥 12 𝑝𝑢𝑙𝑔 𝑥 1𝑚𝑖𝑛
=
𝑥 𝑥
𝑝𝑢𝑙𝑔 𝑥
𝑥
60
𝑠
2
12 𝑝𝑢𝑙𝑔 1𝑚𝑖𝑛
1
𝑝𝑖𝑒
𝑉
=
𝜋ᶇ
𝑥
𝐷𝑝
𝑥
𝑥
𝑡
1
𝑝𝑖𝑒
12
𝑚𝑖𝑛
𝑉𝑡 = 𝜋ᶇ 𝑥 𝐷𝑝 𝑥
𝑥
12
𝑚𝑖𝑛
1
𝑝𝑖𝑒
𝑉𝑡 = 𝜋 𝑥 1065 𝑥 4.13´ 𝑥
𝑥
1
𝑝𝑖𝑒
12
𝑚𝑖𝑛
𝑉𝑡 = 𝜋 𝑥 1775 𝑥 2.48´ 𝑥
𝑥
12
𝑚𝑖𝑛
𝑝𝑖𝑒
𝑉
=
1151.51
𝑡
𝑝𝑖𝑒
𝑚𝑖𝑛
𝑉𝑡 = 1152.44
𝑚𝑖𝑛
𝑃𝑜𝑡 = ѡ𝑡 𝑥 𝑉𝑡
𝑃𝑜𝑡 = ѡ𝑡 𝑥 𝑉𝑡
𝑃𝑜𝑡
ѡ
=
𝑡
𝑃𝑜𝑡
𝑉𝑡
ѡ𝑡 =
𝑉𝑡
ѡ𝑡
13.85 𝐻𝑃
33000 𝑝𝑖𝑒. 𝐿𝑏 𝐹/𝑚𝑖𝑛
ѡ𝑡
=
𝑥
19.7 𝐻𝑃
33000 𝑝𝑖𝑒. 𝐿𝑏 𝐹/𝑚𝑖𝑛
𝑝𝑖𝑒
1 𝐻𝑃
1151.51 𝑚𝑖𝑛
=
𝑥
𝑝𝑖𝑒
1
𝐻𝑃
1152.44 𝑚𝑖𝑛
ѡ𝑡 = 396.91 𝐿𝑏
ѡ𝑡 = 564.11 𝐿𝑏
𝑉𝑡
11
PIÑON 3
FORMULA
α
N3
n3
ᶇ3-4
m
Pot3
h
Pc
e
De
Dp
Di
Pd
Ha
Hb
H
L
C
=
=
=
=
=
=
20°
20
1065
=
=
=
=
=
=
=
=
=
=
=
=
=
=
3.25
18.32HP = 18.57 CV = 13.85Kw
7.043
10.21
5.105
71.5 mm
65 mm
57.41 mm
0.307
3.25
3.8
0.543
32.5
97%
=
=
=
=
=
=
=
=
=
=
=
=
=
=
2.167*m
π*m
Pc/2
m*(N+2)
N*m
De-2h
N/Dp
1/Pd
1.167/Pd
0.167*m
(10a12)*m
(Dp1 - Dp2)/2
RUEDA 4
FORMULA
α
N3
n3
ᶇ3-4
m
Pot3
h
Pc
e
De
Dp
Di
Pd
Ha
Hb
H
L
C
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
(n3*N3)/N4
97%
Pot1*ᶇ3-4
2.167*m
π*m
Pc/2
m*(N+2)
N*m
De-2h
N/Dp
1/Pd
1.167/Pd
0.167*m
(10a12)*m
(Dp1 - Dp2)/2
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
20°
55
387.273
0.97
3
17.77HP - 18.02CV - 13.44 Kw
7.043
10.21
5.105
185.25 mm
178.75 mm
171.164 mm
0.307
3.25
3.8
0.543
32.5
121.875 mm
12
FUERZA APLICADA EN EL PIÑON 3
𝑀1
𝑟1
2𝜋𝑛1
𝑃𝑜𝑡1 = 𝑀1 𝑥
60
13.85
𝑀1 =
2𝜋 ∗ 1065
60
𝐹𝑡1 =
FUERZA APLICADA EN EL
ENGRANAJE 4
𝑀1
𝑟1
2𝜋𝑛1
𝑃𝑜𝑡1 = 𝑀1 𝑥
60
13.44
𝑀1 =
2𝜋 ∗ 1065
60
𝐹𝑡1 =
𝑀1 = 0.1242 𝑁𝑚
𝑀1 = 0.3314 𝑁𝑚
𝐷𝑝1
𝑟1 =
2
𝑟1 =
65
2
𝑟1 =
𝑟1 =
𝐷𝑝1
2
178.75
2
𝑟1 = 0.0325 𝑚
𝑟1 = 0.0894 𝑚
𝐹𝑡1 =
𝐹𝑡1 =
𝑀1
𝑟1
0.1242
0.0325
𝐹𝑡1 =
𝐹𝑡1 =
𝑀1
𝑟1
0.3314
0.0894
𝐹𝑡1 = 3.82 𝑁
𝐹𝑡1 = 3.70 𝑁
𝐹𝑟1 = 𝐹𝑡1 ∗ 𝑇𝑎𝑛 ∝
𝐹𝑟1 = 𝐹𝑡1 ∗ 𝑇𝑎𝑛 ∝
𝐹𝑟1 = 3.82 ∗ 𝑇𝑎𝑛20°
𝐹𝑟1 = 3.70 ∗ 𝑇𝑎𝑛20°
𝐹𝑟1 = 1.39 N
𝐹𝑟1 = 1.35 N
13
CARGA TRANSMITIDA A LOS
DIENTES DEL PIÑON 3
CARGA TRANSMITIDA A LOS
DIENTES DEL ENGRANAJE 4
𝑉𝑡 = ѡ 𝑥 𝑟
𝑉𝑡 = ѡ 𝑥 𝑟
𝑉𝑡
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠
=
𝑥
𝑥
𝑝𝑢𝑙𝑔
𝑥
𝑥
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠
60
𝑠
2
12 𝑝𝑢𝑙𝑔 1𝑚𝑖𝑛
=
𝑥 𝑥
𝑝𝑢𝑙𝑔 𝑥
𝑥
60
𝑠
2
12 𝑝𝑢𝑙𝑔 1𝑚𝑖𝑛
𝑉𝑡
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠
𝑉𝑡
=
𝑥
𝑥
𝑝𝑢𝑙𝑔
𝑥
𝑥
2𝜋ᶇ 1 𝐷𝑝
1 𝑝𝑖𝑒
60𝑠
60
𝑠
2
12 𝑝𝑢𝑙𝑔 1𝑚𝑖𝑛
=
𝑥 𝑥
𝑝𝑢𝑙𝑔 𝑥
𝑥
60
𝑠
2
12 𝑝𝑢𝑙𝑔 1𝑚𝑖𝑛
1
𝑝𝑖𝑒
𝑉𝑡 = 𝜋ᶇ 𝑥 𝐷𝑝 𝑥
𝑥
1
𝑝𝑖𝑒
12
𝑚𝑖𝑛
𝑉𝑡 = 𝜋ᶇ 𝑥 𝐷𝑝 𝑥
𝑥
12
𝑚𝑖𝑛
1
𝑝𝑖𝑒
𝑉
=
𝜋
𝑥
387.27
𝑥
7.04´
𝑥
𝑥
𝑡
1
𝑝𝑖𝑒
12
𝑚𝑖𝑛
𝑉𝑡 = 𝜋 𝑥1065 𝑥 2.56´ 𝑥
𝑥
12
𝑚𝑖𝑛
𝑉𝑡
𝑉𝑡 = 713.76
𝑉𝑡 = 713.76
𝑝𝑖𝑒
𝑚𝑖𝑛
𝑝𝑖𝑒
𝑚𝑖𝑛
𝑃𝑜𝑡 = ѡ𝑡 𝑥 𝑉𝑡
𝑃𝑜𝑡 = ѡ𝑡 𝑥 𝑉𝑡
ѡ𝑡 =
ѡ𝑡 =
𝑃𝑜𝑡
𝑉𝑡
𝑃𝑜𝑡
𝑉𝑡
ѡ𝑡
13.44 𝐻𝑃
33000 𝑝𝑖𝑒. 𝐿𝑏 𝐹/𝑚𝑖𝑛
𝑥
13.85 𝐻𝑃
33000 𝑝𝑖𝑒. 𝐿𝑏 𝐹/𝑚𝑖𝑛 =
𝑝𝑖𝑒
1 𝐻𝑃
713.76 𝑚𝑖𝑛
=
𝑥
𝑝𝑖𝑒
1 𝐻𝑃
713.76 𝑚𝑖𝑛
ѡ𝑡 = 621.39 𝐿𝑏
ѡ𝑡 = 640.34 𝐿𝑏
ѡ𝑡
14
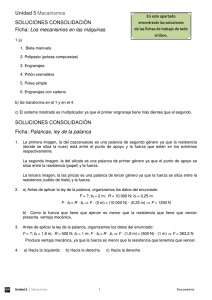
Planos de engranajes:
16
17
18
19
ANEXO:
 0
0