Diseño de Brazo Robótico para Fabricación de Celulares - Tesis
Anuncio

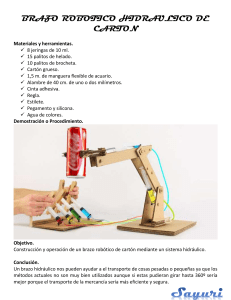
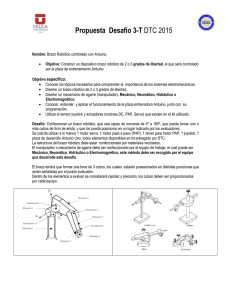
REPÙBLICA BOLIVARIANA DE VENEZUELA UNIVERSIDAD JOSÈ ANTONIO PÀEZ FALCULTAD DE INGENIERÌA ESCUELA DE MECÀNICA ESCUELA DE COMPUTACIÒN CARRERAS: INGENIERIA MECANICA, INGENIERIA EN COMPUTACION DISEÑO DE UN BRAZO ROBOTICO PARA LA AUTOMATIZACION EN EL PROCESO DE FABRICACION DE UN CELULAR. Autores: Luis De Almeida Alimar Granda Jorge Carrera Tutor: María Auxiliadora San Diego – Agosto del 2021 Índice General CAPITULO I II III IV PP EL PROBLEMA 1.1 Planteamiento del Problema…………………..3 1.1.1 Formulación del Problema………………..4 1.2 Objetivos de la Investigación…………………5 1.2.1 Objetivo General…………………………5 1.2.2 Objetivos Específicos…………………….5 1.3 Justificación de la Investigación………………5 1.4 Alcance y Limitaciones………………………..6 MARCO TEÓRICO……………………………………....8 2.1 Antecedentes…………………………………..8 2.2 Bases Teóricas………………………………..10 2.3 Cuadro de Operacionalización de Variables…14 MARCO METODOLÓGICO…………………………...15 3.1 Tipo de Investigación………………………...15 3.2 Diseño de la Investigación…………………...15 3.3 Nivel de la investigación…………………….16 3.4 población y muestra………………………….16 ASPECTOS ADMINISTRATIVOS 4.1 Recursos Humanos………………………….18 4.2 Recursos Materiales………………………....18 4.5 Recurso Tiempo……………………………..19 2 CAPÍTULO I EL PROBLEMA 1.1 Planteamiento del problema La distribuidora de robots colaborativos de México “RIPIPSA”, define los brazos mecánicos como: Robots articulados, pues un brazo mecánico es construido y elaborado con estructuras de carácter flexible y conformadas por articulaciones adaptables que permiten ejecutar un amplio rango de movimientos y funciones simulando a un brazo humano. Tienen como principal característica el cumplir la funciones de agilizar actividades, tareas y funciones que requieren una actividad de repetividad y precisión con entornos humanos seguros; durante los procesos de automatización de líneas de producción y manipulación de máquinas en diferentes industrias: Mecánica, Minería, Automovilística, Farmacéutica, Alimenticia etc. Son un tipo de brazos robóticos que permiten generar soluciones viables específicamente en cuanto a la línea de ensamblaje de dispositivos de bolsillo como lo son los celulares, Smartwatches y similares, pues logran una automatización mediante tareas continuas que implican movilizar objetos de distintos pesos combinados con gran precisión y realizan montajes en diversos ángulos y posiciones, los cuales una 3 persona común no podría hacer a igual eficacia o por la misma cantidad de tiempo. Estos robots de ensamblaje son resistente al calor, polvo, agua y generalmente son una solución bastante económica para muchas empresas. Los avances tecnológicos modernos han dado paso a mayor acceso económico a el uso de maquinaria en contraste con el costo de trabajadores tradicionales, una de las desventajas que estos últimos poseen es el hecho que no se encuentran en la capacidad de hacer una misma actividad repetitiva, por altos periodos de tiempo sin que haya variación en la producción, margen de error fluctuante o perdida de material en el proceso, es por eso que el uso de artificios mecánicos que si pueden realizar las anteriormente nombradas actividades repetitivas cumpliendo con los lineamientos de producción y teniendo un mayor tiempo de trabajo eficiente, esto se debe a que no necesitan vacaciones, descansos, alimentación, entre otros. Seguidamente de esto, mientras que se puede argumentar que estas tienen un alto costo de mantenimiento, se puede decir que la ganancia producida es mayor a lo largo de su tiempo de uso, esta investigación se basa en el diseño de un brazo mecánico de bajo costo para el ensamblaje de piezas de celulares, el cual al ser de bajo costo tiene mayor devolución de la inversión realizada al tomar en cuenta su tiempo de servicio. 1.1.1 Formulación Del Problema ¿Es posible diseñar un brazo mecánico de bajo costo y alto rendimiento, nivel de programación de funciones de fácil acceso, el cual sea capaz de ensamblar partes de celulares de una manera eficaz? 4 1.2 Objetivos de la Investigación 1.2.1 Objetivo General Diseñar un brazo mecánico de bajo costo que sea capaz de ensamblar partes de celulares basados en la tecnología mecatrónica. 1.2.2 Objetivos Específicos Diagnosticar los requerimientos en la cadena de ensamblaje de celulares para un entendimiento más óptimo de las funciones habituales de un brazo robótico. Discernir un tipo de estudio de los distintos materiales y alternativas en la fabricación de un brazo robótico. Diseñar un brazo robótico que permita automatizar las tareas que se llevan a cabo en el proceso de ensamblaje de celulares. 1.3 Justificación de la investigación En vista de que las empresas de ensamblaje poseen una gran cantidad de actividades repetitivas y que estas poseen ciertas consecuencias en el rendimiento humano, incrementando el margen de error se propone un brazo robótico ya que este permitirá automatizar el proceso de ensamblaje, como también podrá realizar 5 actividades repetitivas cumpliendo con los lineamientos de producción y teniendo un mayor tiempo de trabajo eficiente. Dado un diseño exitoso de un brazo robótico y este llegue a incorporarse en la línea de ensamblaje podría aumentar significativamente el rendimiento de la operativa a diferencia de un operario común, los brazos robóticos pueden repetir la misma tarea todo el tiempo que sea necesario como también optimizar y dotar de eficiencia a los procesos complejos ya que poseen una gran precisión disminuyendo así el margen de error. Adicionalmente se puede destacar que el tiempo de vida útil del brazo robótico es largo, y al poseer un costo de fabricación bajo tiene mayor devolución de la inversión realizada al tomar en cuenta su tiempo de servicio. 1.4 Alcance y limitaciones El diseño del brazo robótico no será capaz de manipular al 100% un objeto tangible, únicamente mostrara su funcionamiento y su lenguaje de programación. 1.4.1 Alcance Se limitaría al uso de materiales con bajo costo. Tiene un alcance bajo en peso ya que estará fabricado para la realización de ensamble de celulares, lo cual tendría que ser con mucha precisión. Aborda la realización de tareas repetitivas y tediosas. 6 Realizara tareas en horas nocturnas, lo cual permite el ahorro de tiempo. Reduce el riesgo de accidentes al personal. 1.4.2 Limitaciones Una vez programados para una tarea no son capaces de realizar ninguna otra adicional. El diseño del brazo robótico no será capaz de manipular al 100% un objeto tangible, únicamente mostrará su funcionamiento y su lenguaje de programación. 7 CAPÍTULO II MARCO TEORICO 2.1 Antecedentes El uso de sistemas de un robot en la industria para completar las funciones requeridas en las últimas décadas, la precisión extremadamente alta ha ido en aumento. El desarrollo de estos sistemas está centrarse en mejorar determinados aspectos, como la resistencia a distintos trabajos condiciones, precisión de movimiento, versatilidad (procesamiento, Corte, taladrado, etc.), adaptabilidad e independencia para diferentes entornos de trabajo Su funcionamiento, es decir, tiene la capacidad de tomar decisiones sobre su desempeño. A continuación se presentarán una serie de artículos de investigación. Antes del proyecto, utilizarlo como principal fuente de información y verificar su estructura teórica y aplicación, y analizar los aportes en base a las variables utilizadas en los objetivos establecidos en la investigación. Torres, J. Yate, J. López, S. (2020). Egresados de la Universidad “Santo Tomas” – (Santander, Colombia), realizaron una investigación titulada: diseño de brazo robótico remoto para reducir crisis en el campo medico promoviendo el distanciamiento social en el marco de la contingencia sanitaria del COVID-19. El objetivo es diseñar un brazo robótico a control remoto o con la ayuda del personal médico, prevenir el impacto grave de la infección en COVID-19 entidades sanitarias 8 públicas y privadas del país. Se usó esto para generar una propuesta innovar para el desarrollo de la productividad en el campo de la salud. Esto comenzará desde en las siguientes fases, la primera donde se realizara una evaluación preliminar de las operaciones número de brazos robóticos que se han utilizado para inspecciones a nivel internacional usuarios médicos, porque esta es una máquina cada vez más importante la importancia de una inspección eficaz; por esta razón, este beneficio un nuevo modelo de obtención de información suficiente para la realización de tecnología a escala global y el funcionamiento de la máquina. La segunda etapa implica realizar cálculos, modelos previsibles y otros factores relacionados en cada componente incorporar la construcción de la máquina, y finalmente, la ejecución del brazo robótico definir el correcto comportamiento de la máquina en cuestión mediante simulación, para garantizar el diseño CAD, los cálculos realizados y los beneficios efectivos puede conseguirlo implementando estas máquinas en el sistema sanitario. Morales, k. Hoyos, C. García, J. (2019). Egresados de la “Universidad nacional experimental del Táchira”- (Venezuela). Realizaron una investigación titulada: Diseño y optimización de la estructura mecánica de un brazo robótico antropomórfico desarrollado con fines educativos. El objetivo es presentar un diseño y construcción de la estructura mecánica del brazo robótico. Personificación de cuatro grados de libertad con fines didácticos. El proyecto parte de la fase de desarrollo. El concepto recibió seis propuestas destinadas a satisfacer las necesidades del cliente. Fue luego ejecutado utilizando las especificaciones del producto como referencia, seleccionando el concepto a desarrollar. Por el concepto se sugiere que se hayan realizado siete etapas de rediseño, para que sea posible llegar al plan de diseño final. En concreto, se realiza una fase de simulación continua para analizar la respuesta dinámica de la estructura en las 9 siguientes condiciones aplicar carga a lo largo del tiempo, observar el estado de tensión aplicado a cada pieza y ajustar el tamaño. El enlace considera las restricciones y especificaciones previamente definidas. Según los resultados obtenidos, se generó una estructura que satisfaga las especificaciones de diseño originalmente establecidas, teniendo en cuenta tenga las restricciones relacionadas con el servomotor que se utilizará y la carga máxima que se manejará. Al final, además del producto final desarrollado, también se muestran los modelos de cinemática directa e inversa del brazo. 2.2 Bases Teóricas En este apartado se explicará un concepto muy importante que sirve como la principal línea de investigación por la cual se rige este trabajo de investigación, dicho esto, este concepto se conoce como “Mecatrónica”. 2.2.1 Mecatrónica (W. Bolton, 2016) Un sistema mecatrónico no es sólo la unión de los sistemas electrónico y mecánico y es más que sólo un sistema de control; es una integración completa de todos ellos en la cual existe un enfoque concurrente al diseño. (pág., 3) Habiendo leído esto podemos inferir que la Mecatrónica representa un nuevo nivel de integración para la tecnología de la manufactura avanzada y de los procesos. El intento se basa forzar el trabajo multidisciplinario para la creación de sistemas 10 especiales así como reforzar el entendimiento de los procesos y el control en una empresa, como bien podría ser una en la cual se manufacturen celulares. 2.2.2 Robot Según Ollero (2001) “En el término robot confluyen las imágenes de máquinas para la realización de trabajos productivos y de imitación de movimientos y comportamientos de seres vivos.” (p. 1) Además, los robots actuales son obras de ingeniería, por lo que han sido diseñados con propósitos específicos como producir bienes y servicios o explotar recursos naturales. 2.2.2 El brazo robótico Según Ruiz-Velasco (2007) sirve para mover la mano y tomar o posicionar objetos. El espacio de trabajo y de alcance del brazo robótico, depende de su estructura mecánica.” Esto significa que el brazo transporta la carga y debe tener la posibilidad de moverse para darle funcionalidad también a la mano. (p. 92) Donde infieren sus diferentes partes, se unen y conectan para hacer sus movimientos de rotación y traslación. Al usar estos movimientos estos brazos incrementan su capacidad motriz y pueden imitar el movimiento humano requerido para ensamblaje de piezas. Incluso se pueden realizar tareas más delicadas. Entre ellas, el ajuste de piezas o de tornillos en diferentes estructuras. 11 2.2.3 Tipos de brazos robóticos Una vez que entendemos qué es esta herramienta, continuamos discutiendo los tipos de brazos robóticos que se pueden encontrar en la industria y las fábricas. Estos promueven el trabajo de los empleados de la industria y mejoran la moral Las horas de trabajo de estas máquinas son casi continuas y mejoran el rendimiento de las máquinas. Por tanto, permiten realizar tareas complejas de traslado, manipulación de objetos, productos químicos, piezas, etc. Es caro o peligroso para los humanos. 2.2.3.1 Robot cartesiano Los robots cartesianos (RRR) son también conocidos como robots pórticos o lineales. Según Reyes (2011) “el modelo cinemático del robot cartesiano es más sencillo en contraste con otros, ya que presenta características lineales. Este tipo de robot es útil en graficadores, taladros automáticos y plotters.” (p. 243) 2.2.3.2 Robot esférico o polar Los robots esféricos (RRP), Según Reyes (2011) “El nombre de esta configuración deriva del hecho que la posición del extremo final puede ser programada en coordenadas esféricas.” (p. 238) 12 2.2.3.3 Robot cilíndrico Sus ejes forman un sistema de coordenadas de círculos concéntricos que le permiten efectuar tareas como la manipulación de máquinas. Pero además, puede realizar funciones de soldadura de punto. También manejan maquinaria de fundición a presión y operaciones de ensamblaje. Según Reyes (2011) “Su estructura mecánica es compleja y su espacio de trabajo es la porción de un cilindro hueco… El origen del sistema de referencia cartesiano para el robot en la configuración cilíndrica se ubica en la articulación de la base.” (p. 241) 2.2.3.5 Robot SCARA Son brazos de trabajo pesado, comúnmente de gran tamaño. Según Reyes (2011) “es un brazo planar antropomórfico de dos articulaciones rotacionales para la base y hombro, respectivamente, que se mueve en un plano horizontal; la tercera articulación es prismática.” (p. 236) En conclusión podemos decir que el brazo robótico es una innovación tecnológica de vanguardia, que cambio el mundo desde su fabricación y que está presente en multitud de industrias en la actualidad. Estos pueden llevar a cabo variados tipos de trabajos que una persona no puede hacer por seguridad, falta de habilidad y/o conocimiento y también trabajo común que cualquier empleado puede hacer. Sean meramente de carga de objetos pesados o tareas de precisión. Esta herramienta es una 13 forma de mejorar la eficiencia del trabajo en las fábricas y mejorar la economía de las empresas. 2.3 Cuadro técnico metodológico Objetivo general: Diseñar un brazo mecánico de bajo costo capaz de ensamblar partes de celulares. Cuadro técnico metodológico Nº 1 Objetivo especifico Estudiar los procesos que se llevan a cabo en la cadena de ensamblaje de celulares para determinar requisitos necesarios en el diseño de un brazo robótico. Variables Estudio de procesos. 1-Proceso de línea de ensamblaje. Indicadores Instrumento -Orienta la actividad a los objetivos propuestos. -Dinámicas de integración. 2-Estudio de línea. Diseñar un brazo robótico que permita automatizar las tareas que se llevan a cabo en el proceso de ensamblaje de celulares. Automatización de tareas. Comparar los distintos materiales y alternativas que permitan fabricar un brazo robótico a bajo costo. Comparación de materiales y alternativas. Implementar el brazo robótico en base al diseño y los elementos seleccionados. Dimensiones 1-Personal capacitado. -Detección y corrección de errores. 2-Manejo de robótica. Brazo robótico. 1-Analisis de materiales y posibles alternativas. 2- Estudio de mercado. 1-Aplicación de nuevos procedimientos. -Mapas de Conceptos. -Análisis de proceso. -Observación de ideas. -Planos de diseño. -Relaciona los contenidos previos con los nuevos conocimientos. -Trabajo escrito. -Orienta la actividad a la resolución del problema. - -Análisis. Fuente: Alimar Granda Luis de Almeida Jorge Carrera 14 Item CAPÍTULO III MARCO METODOLOGICO Una vez planteado el problema de investigación y los objetivos para alcanzar por los autores, se hizo necesario establecer los procedimientos de orden metodológico que permitieron ejecutar la investigación. Esto implicó seleccionar el tipo y diseño de la investigación y su aplicación al contexto particular en estudio, la operacionalización de las variables y las técnicas e instrumentos de recolección de información. Según Arias (2006), el marco metodológico constituye el “como” se debe realizar la investigación para responder al problema planteado. 3.1. Naturaleza de la investigación. El presente trabajo se clasifica como un tipo de investigación cuantitativa, ya que, según Hernández, Fernández y Baptista (2008) definen que: “el enfoque cuantitativo usa la recolección de datos, probar hipótesis, con base en la medición numérica y análisis estadísticos, para establecer patrones de comportamiento y probar teorías”. 3.2. Diseño de la investigación. El diseño de la investigación adoptado en el presente estudio es un diseño no experimental y de campo, ya que se pretende observar un fenómeno en su contexto natural y, así mismo, obtener información respecto al mismo. De acuerdo con el 15 planteamiento de Hernández, Fernández y Baptista (2002), la investigación no experimental es aquella que se efectúa sin manipular deliberadamente las variables, observando el fenómeno tal y como se presenta en su ambiente natural. Así mismo, Arias (2006) describe la investigación de campo aquella que consiste en la recolección de datos directamente de los sujetos investigados, o de la realidad donde ocurren los hechos, sin manipular o controlar variable alguna, es decir, el investigador obtiene la información, pero no altera las condiciones existentes. 3.3. Nivel de investigación. Dado el propósito de este trabajo, el mismo se circunscribe dentro de un nivel de investigación descriptiva, ya que su finalidad es indagar por la problemática actual con respecto a las dificultades que se pueden presentar en una línea de producción debido a actividades repetitivas y consecuencias del rendimiento humano lo cual incrementa un margen de error con dicho servicio y a su vez plantear el diseño de un brazo robótico de bajo costo para así se capaz de mejorar esta relación. Según Hernández, Fernández, Baptista (2008) “las investigaciones descriptivas se definen como aquellas que buscan especificar las propiedades, las características y los perfiles de personas, grupos, comunidades, procesos, objetos o cualquier otro fenómeno que se someta a un análisis”. 3.4. Población y muestra. Tamayo (2012) define la población como la totalidad de un fenómeno de estudio, incluye la totalidad de unidades de análisis que integran dicho fenómeno y que debe cuantificarse para un determinado estudio integrando un conjunto N de entidades 16 que participan de una determinada característica, y se le denomina la población por constituir la totalidad del fenómeno adscrito a una investigación. Quiere decir, que una población no necesariamente es representativa del universo, simplemente es un subconjunto de él, delimitado por criterios específicos. En tal sentido, algunos autores suelen clasificar las poblaciones en dos categorías: finita e infinita (Martínez, 1984; Ramírez, 1995). Es infinita cuando no es posible especificar o registrar cuántos y quiénes la conforman; mientras se define como finita, la población cuyos integrantes son conocidos y pueden ser identificados y listados por el investigador en su totalidad. Para esta investigación la población por lo tanto no aplica debido a que este trabajo de investigación se basa en el diseño de un instrumento más no en su implementación en una empresa especifica ni el uso que se le dé a dicho diseño por parte de un individuo el cual no se los tres autores de la presente investigación. 17 CAPÍTULO IV ASPECTOS ADMINISTRATIVOS 4.1. Recursos Humanos Los Autores De este trabajo de investigación. El tutor asignado por la Universidad José Antonio Páez. Especialistas en el área de mecatrónica consultados durante la realización de este trabajo de investigación. 4.2. Recursos Materiales Computador. Cableado de conexión a internet. Teclado y mouse. Monitor. 4.3 Recursos Institucionales Universidad José Antonio Páez - (Carabobo, Venezuela). Universidad Santo Tomas - (Santander, Colombia). Universidad nacional experimental del Táchira – (Táchira, Venezuela). 4.5 Recurso Tiempo El tiempo a usar en la planificación y realización de este trabajo de investigación consta de aproximadamente dieciséis (16) semanas dadas por la duración del semestre académico correspondiente a la universidad José Antonio Páez. 18 4.5.1 Cronograma de Actividades Cronograma De Actividades ACTIVIDAD / SEMANA Planificación de la investigación 1 2 3 4 5 X X X X X 6 7 Tiempo 8 9 10 11 12 13 14 15 16 T 5 Redacción 8 Correcciones 7 Simulación 2 Defensa 1 Total 23 Fuente: Luis De Almeida, Jorge Carrera, Alimar Granda (2021) 19 REFERENCIAS https://tesisinvestigacioncientifica.blogspot.com/2013/08/queeslapoblacion.html?m=0 http://virtual.urbe.edu/tesispub/0063522/cap03.pdf https://www.tdx.cat/bitstream/handle/10803/8917/Capitulo_III_Marco _Metodol_gico.pdf https://www.google.com/maps/place/UNIVERSIDAD+SANTO+TOM AS/@7.5489667,75.4175717,7z/data=!4m9!1m2!2m1!1suniversidad+ santo+tomas!3m5!1s0x0:0x6da1e9e297afb4a3!8m2!3d8.2586177!4d7 3.3590007!15sChd1bml2ZXJzaWRhZCBzYW50byB0b21hcyIDiAEB kgEGc2Nob29s https://www.google.com/search?q=robots+esfericos&oq=robots+esferi cos+&aqs=chrome..69i57j0i22i30l2.9064j0j15&sourceid=chrome&ie= UTF-8 https://www.google.com/search?q=ESNECA+Business+Schoolbrazo+ robotico&sxsrf=ALeKk01Ut4qJLkvySR2hZQHJhtagg8et6g%3A1627 431082153&ei=qqAAYeziCLSyqtsPq_mTyAI&oq=ESNECA+Busine ss+Schoolbrazo+robotico&gs_lcp=Cgdnd3Mtd2l6EANKBAhBGABQ AFgAYCFoAHAAeACAAQCIAQCSAQCYAQCqAQdnd3Mtd2l6&s client=gwswiz&ved=0ahUKEwjs37CcvYTyAhU0mWoFHav8BCkQ4 dUDCA8&uact=5 20 https://www.academia.edu/39131931/Mecatr%C3%B3nica_Sistemas_ de_control_electr%C3%B3nico_en_la_ingenier%C3%ADa_mec%C3 %A1nica_y_el%C3%A9ctrica_5ta_Edici%C3%B3n https://www.google.com/search?q=Mecatr%C3%B3nica%3A+Sistema s+de+control+electr%C3%B3nico+en+ingenieria+mecatr%C3%B3nic a+W.+Bolton&sxsrf=ALeKk02Ew1UhixbzUxd2_yXgMqm1gNY0A %3A1627428319303&ei=35UAYZPmEZGNwbkPzbG04AM&oq=M ecatr%C3%B3nica%3A+Sistemas+de+control+electr%C3%B3nico+e n+ingenieria+mecatr%C3%B3nica+W.+Bolton&gs_lcp=Cgdnd3Mtd2 l6EAxKBAhBGABQAFgAYO_kBWgAcAJ4AIAB7ASIAewEkgED NS0xmAEAqgEHZ3dzLXdpesABAQ&sclient=gwswiz&ved=0ahUK EwjT0fn2soTyAhWRRjABHc0YDTwQ4dUDCA8 21