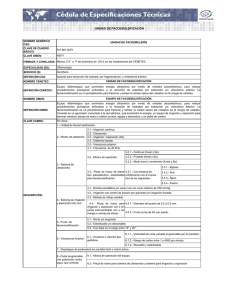
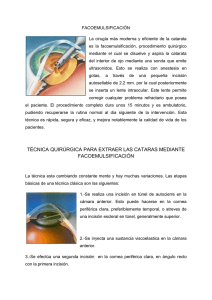
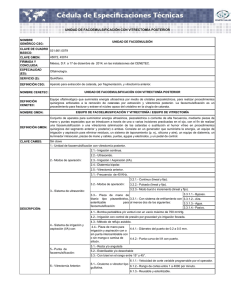
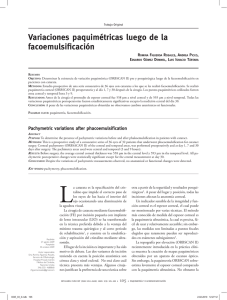
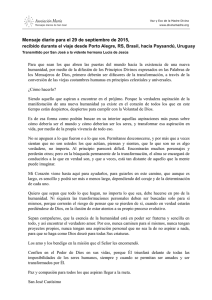
49 Fundamentos de la facoemulsificación y dinámica de fluidos Javier Mendicute, Ramón Lorente INTRODUCCIÓN La correcta utilización de la técnica de facoemulsificación en clínica requiere: 1) Entender los principios básicos de la dinámica de fluidos; 2) Conocer profundamente los aparatos y sus prestaciones; y 3) Aplicar dichos conocimientos en la técnica quirúrgica. El fin es lograr una técnica depurada con utilización eficaz de la energía; de esta forma, evitaremos al máximo la posibilidad de complicaciones quirúrgicas y será posible una rápida recuperación visual. Los esfuerzos de los últimos 40 años, tras la descripción de la técnica1, han ido orientados a disminuir el tamaño de la incisión1-4, a utilizar la menor energía posible5 y a mantener la mayor estabilidad de cámara anterior en cualquier situación dinámica6. La cirugía de la catarata por facoemulsificación es entendida como compuesta por dos sistemas básicos: 1) Uno capaz de fragmentar el cristalino dentro del ojo; y 2) Otro capaz de evacuar tales fragmentos por la incisión más pequeña posible. Todo ello debe ser practicado con la máxima seguridad, evitando cualquier tipo de daño, para las estructuras que rodean al cristalino. El reto del cirujano es lograr un balance entre la potencia del facoemulsificador, que presenta una tendencia a repeler los fragmentos del cristalino, el efecto del flujo, que debería orientar dichos fragmentos hacia su punta, y el vacío, que sujeta los fragmentos sobre el tip y genera la fuerza de succión suficiente como para evacuarlos de la cámara anterior. El uso inadecuado de la tecnología disponible lleva implícito un procedimiento quirúrgico poco eficiente: mayor tiempo de facoemulsificación, mayor utilización de potencia y mayor generación de calor; es decir, mayor riesgo para las estructuras de la cámara anterior y, en definitiva, para el paciente. mencionados controles pueden ser modificados a través de pulsadores, de una pantalla táctil o a través de un mando a distancia y activados por los mismos medios o a través de un pedal de facoemulsificación. 3. Una línea de aspiración que permite extraer fluidos y los restos del cristalino facoemulsificados por efecto de la bomba de aspiración. La mencionada línea drena a un cassette que, en general, se encuentra en el aparato de facoemulsificación. 4. Un mango de facoemulsificación donde confluyen la línea de irrigación, la línea de aspiración y el sistema o motor que convierte la energía eléctrica en energía mecánica para facilitar la facoemulsificación. 5. Un pedal de facoemulsificación con el que a través del pie podemos controlar el paso de unas a otras funciones durante el procedimiento quirúrgico y las funciones en sí propiamente dichas. FORMAS DE FACOEMULSIFICACIÓN Básicamente existen dos formas de utilizar un equipo de facoemulsificación: 1) Facoemulsificación axial; y 2) Facoemulsificación bimanual. EQUIPOS DE FACOEMULSIFICACIÓN Un sistema de facoemulsificación (Fig. 1) está compuesto por: 1. Una botella de irrigación conectada a una línea de irrigación, por la que circulará el fluido, con un dispositivo valvular externo, que controla su apertura o su cierre. 2. Un aparato de facoemulsificación o unidad central que contiene el sistema de bomba que utilizaremos y los mecanismos electrónicos que controlarán todo el procedimiento. El aparato permite controlar todos los parámetros necesarios para la práctica de una facoemulsificación; los Fig. 1. Aparatos de facoemulsificación. Pueden verse los equipos Infiniti® (Alcon) (A) Stellaris® (Bausch&Lomb) (B) y Signature® (AMO) (C) consolas que integran las funciones básicas para practicar facoemulsificación con los estándares hoy exigidos. En el equipo Infiniti® pueden verse los elementos que componen un sistema de facoemulsificación: la botella de irrigación, la consola, la línea de aspiración, el mango de facoemulsificación y el pedal. 557 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Fig. 2. Tipos de facoemulsificación. Se muestran las diferencias básicas entre facoemulsificación axial y bimanual. 2.1. Facoemulsificación axial. Existe una vía principal a través de la cual se introduce la punta de facoemulsificación con su manguito de irrigación; la incisión secundaria es de asistencia. 2.2. Facoemulsificación bimanual. Existen dos incisiones, aunque de menor tamaño, y las dos tienen un papel relevante: una de ellas permite la entrada del tip de facoemulsificación, en este caso sin manguito, y la otra asegura la entrada del irrigador que cumple también funciones de manipulador. Ambos sistemas presentan diferencias hidrodinámicas, en cuanto que las corrientes que se generan en cámara anterior son diferentes, y diferencias en la forma de liberación de energía, en cuanto que en la facoemulsificación bimanual está limitada la posibilidad de refrigeración del tip. También es cierto que las formas de liberación de energía que limitan la generación de calor son ya de aplicación tanto en facoemulsificación axial como en bimanual. Facoemulsificación axial Entendemos por facoemulsificación axial a la técnica practicada a través de una incisión, digamos principal, a través de la cual se introduce la punta de facoemulsificación (tip) con su manguito de irrigación (sleeve) que asegura el aporte de fluidos a la cámara anterior para asegurar su estabilidad y la refrigeración del tip (Fig. 2.1). Aunque existe una segunda incisión de asistencia, ésta es de mínimo tamaño (1 mm) y, en general, sólo se utiliza para apoyarnos con instrumental asistencial durante el procedimiento quirúrgico. La facoemulsificación axial convencional es practicada a través de incisiones de 2,75-3 mm y es la evolución de las técnicas descritas en los últimos 20 años. Recientemente se ha introducido el concepto de facoemulsificación microcoaxial para hacer referencia a la técnica que, conservando los mismos principios, se practica a través de incisiones menores de 2,2 mm. Facoemulsificación bimanual En este tipo de procedimientos, la facoemulsificación se practica a través de dos incisiones: una a través de la cual se introduce la punta de facoemulsificación (tip), sin manguito, y otra a través de la cual se introduce el sistema de irrigación 558 (Fig. 2.2). En esta técnica no se utilizan manguitos (sleeves) por lo que la refrigeración del tip sólo puede ser conseguida a través del fluido que sale a través de la incisión (pérdidas incisionales, tanto en modo irrigación como en modo irrigación-aspiración) o del tip (exclusivamente en modo aspiración), siendo por ello necesario recurrir a nuevas formas de administración de energía que aseguren una menor liberación de calor con objeto de evitar la quemadura incisional. En general, se practican dos incisiones de 1,4-1,6 mm; a través de una de ellas se introducirá el tip de facoemulsificación y a través de la otra el sistema de irrigación que, además, suele estar diseñado como para permitir la manipulación de los fragmentos del cristalino. En algunos casos se puede recurrir a una tercera incisión para utilizar un mantenedor de cámara. TERMINOLOGÍA IMPRESCINDIBLE En este apartado describiremos los términos y conceptos habituales que manejamos alrededor de la facoemulsificación; lamentablemente muchos términos son más conocidos en su forma inglesa y son usados en tal idioma no habiéndose generalizado, en la práctica, el uso de su traducción al castellano. Este diccionario terminológico está organizado, en orden alfabético, según su forma inglesa acompañada, eso sí, de su traducción al castellano más habitual. Los términos son utilizados a lo largo del texto y la mayoría serán posteriormente explicados en mayor extensión. Absolute phaco time (APT)/tiempo absoluto de facoemulsificación El tiempo absoluto de facoemulsificación sería el tiempo de utilización de la potencia de facoemulsificación al 100%. Sin embargo, dado que utilizar la potencia al 100% es infrecuente suele definirse por equivalencias: por ejemplo, 10 sg al 50% sería un APT de 5 sg. Aspiration level/nivel de aspiración Véase vacuum/vacío Aspiration rate/aspiration flow rate/velocidad de aspiración Véase flow/flujo. Aspiration time/tiempo de aspiración Tiempo total en el que el sistema se ha encontrado en aspiración, sea en posición 2 ó 3. Average phaco power/potencia de facoemulsificación media Es la potencia de facoemulsificación media utilizada mientras está activa la liberación de energía de facoemulsificación en posición 3. Case time/tiempo del caso Sería la duración total del caso. Puede variar entre equipos dependiendo de las referencias que toman para medirlo. 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Algunos equipos empiezan a contar el tiempo tras la primera presión del pedal y finalizan cuando se retiran todos los mangos y el cassette. Cavitation/cavitación Es el efecto generado alrededor del anillo metálico del tip debido a la zona de baja presión que se genera cuando el tip inicia su retroceso; dicho efecto genera la formación de burbujas que, al implosionar, se cree son capaces de destruir fragmentos del cristalino próximos a esa zona. Compliance/compresibilidad Compliance es definido como un cambio en volumen en respuesta a un cambio en presión; tal fenómeno lleva implícito cierta constricción de la línea de aspiración y, por ello, se extrae algo de fluido del sistema bajo el efecto de una bomba peristáltica funcionante con la punta de facoemulsificación obstruida. Durante tal fenómeno se deforman los tubos de aspiración según su elasticidad; su grado de deformación está condicionado por su coeficiente de compresibilidad (compliance). Cumulative dissipated energy/Energía disipada acumulada Mide la energía de facoemulsificación utilizada durante un procedimiento quirúrgico. Mide la energía utilizada con el pedal en posición 3. Suele venir representado por el acrónimo CDE (Cumulative Dissipated Energy). En el apartado correspondiente se explica su forma de cálculo. Dual linear pedal/pedal dual lineal El Dual linear pedal o pedal dual lineal es un pedal que permite ser utilizado como un pedal convencional de facoemulsificación o como un pedal que separa fluídica y ultrasonidos en dos planos de movimiento y así permite un control independiente de fluídica y de ultrasonidos o un control combinado de ambos. primeros equipos, el pedal sólo permitía un avance lineal en cuatro posiciones, que comentaremos, pero actualmente ha incorporado nuevas funciones a través de un mayor número de pulsadores. Flow/flujo Entendemos por tal el volumen de fluido que puede circular por la línea de aspiración por unidad de tiempo; en general, se expresa en centímetros cúbicos (cc) por minuto (min). El flujo es el parámetro, o el ajuste en el equipo, que controla la forma en la que el material es atraído a la punta del facoemulsificador; sus ajustes aceleran (a mayor flujo) o enlentecen (a menor flujo) los procesos que ocurren en cámara anterior y con ello la cirugía: si suceden muy rápidamente puede bajarse su ajuste y si suceden lentamente puede subirse. Followability/»efecto imán» Pudiera ser definida como la fuerza que se genera en la cámara anterior por la circulación de fluidos y orienta los fragmentos del cristalino hacia la punta del tip de facoemulsificación. Suele ser comparada con el magnetismo. Se genera por las corrientes de los fluidos dentro del ojo desde la vía de irrigación hasta la vía de aspiración y tanto en su génesis como en su comportamiento influyen el flujo, el nivel de vacío y el estado de la oclusión en cada momento. Hybrid pump/bombas híbridas Bombas que pueden actuar como bombas de flujo o de vacío, independientemente de su diseño original, a través de una programación específica. Implosion/implosión Fenómeno que se describe ocurre durante la cavitación y que viene a significar una explosión no expansiva o interna de los fragmentos del cristalino. Duty cycle/periodo útil El periodo o tiempo útil de facoemulsificación es entendido como el tiempo en el que el tip de facoemulsificación se encuentra activo, es decir en el recorrido longitudinal que le es propio para cumplir su función. Habitualmente se expresa en porcentajes. Peak aspiration/pico de aspiración Flujo máximo alcanzado durante una facoemulsificación. Effective phaco time (EPT)/tiempo real de facoemulsificación Es el tiempo real de facoemulsificación y, al menos en teoría, permitiría comparar técnicas con un mismo equipo. Representa el tiempo de facoemulsificación que se hubiera empleado si hubiéramos trabajado en modo continuo al 100% de potencia, circunstancia por otro lado poco probable. Peristaltic pump/bomba peristáltica Tipo de sistema de aspiración utilizado en facoemulsificación. Es una bomba de flujo caracterizada por presentar unos rodillos montados en disposición circular y que al girar comprimen el tubo de la línea de aspiración generando el movimiento de fluidos en su interior; tal movimiento mantiene un nivel de vacío en el interior del sistema. Su mayor beneficio es el control lineal del nivel de vacío del sistema que se logra incrementando la velocidad de rotación de los rodillos, movimiento que incrementa rápidamente la presión de aspiración en el sistema. Foot pedal/pedal Elemento que permite el control de las diferentes fases de la facoemulsificación por manipulación con el pie. En los Peak vacuum/pico de vacío Vacío máximo alcanzado durante un procedimiento de facoemulsificación. 559 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Phaco time/tiempo de facoemulsificación Tiempo total en el que se libera energía de facoemulsificación o tiempo total en posición 3 del pedal. Power/potencia Hace referencia al recorrido longitudinal de la punta de facoemulsificación. Habitualmente se expresa en porcentajes sobre el máximo recorrido posible (100% de potencia) y la máxima potencia es propia de cada equipo. Es necesario advertir que no son comparables los mismos porcentajes de equipos diferentes. Pulsed mode/modo pulsado Liberación de energía en forma de pulsos de 50 milisegundos (fase «on») seguidos de periodos de reposo (fase «off»). Pulses per second/pulsos por segundo (PPS) Número de fases de liberación de energía de la punta de facoemulsificación por segundo que, en general, suelen oscilar entre 1 y 20. En modo pulsado, a cada fase de liberación de energía (fase «on») le corresponde una fase de reposo (fase «off»). Reflux/reflujo El reflujo en un facoemulsificador es el mecanismo que permite invertir la dirección de la corriente y liberar en sentido inverso, hacia cámara anterior, fluido o material que ya se encontraba en la línea de aspiración y fuera de la cámara anterior. Tal fenómeno se puede lograr: 1) Invirtiendo la dirección de la bomba de aspiración; 2) Bloqueando la línea de aspiración; y 3) Abriendo una segunda vía de infusión conectada a ella. Rise time/tiempo de culminación Es el intervalo de tiempo entre el momento en el que se produce la oclusión del tip y el momento en el que el vacío alcanza su máximo nivel. Sleeve/manguito Es el capuchón de silicona que se coloca en la punta del mango de facoemulsificación y rodeando al tip. Su función es asegurar la llegada de fluidos a la cámara anterior, con objeto de asegurar su estabilidad durante el procedimiento quirúrgico, y refrigerar el tip que pudiera calentarse, por efecto de la fricción, en función de la forma de administración de energía elegida. Surge/riada/oleada Es el efecto que se produce tras romperse la oclusión en la punta de facoemulsificación bajo el efecto del vacío; en este momento, se produce una corriente en la vía de aspiración que supera a la capacidad de compensación proporcionada por la irrigación: por tal motivo se produce una brusca pérdida de cámara anterior. 560 Tip/punta Entendemos por tal a la aguja que se ensambla al extremo del mango de facoemulsificación y al que éste transmite su oscilación; es donde se produce la destrucción del cristalino y se encuentra hueco en su interior para permitir la aspiración de los pequeños fragmentos generados tras la emulsificación. Por extensión, también se llama tip a la punta de irrigación-aspiración aunque en estos casos es más frecuente referirnos como tip o punta de irrigación-aspiración. Transducer/transductor Dispositivo capaz de convertir señales eléctricas/electrónicas en energía mecánica. Tuning/sintonización Proceso por el que se ajusta la frecuencia de oscilación de la punta de facoemulsificación a su frecuencia de resonancia óptima. Ultrapulsed mode/modo ultrapulsado Liberación de energía en forma de ultrapulsos de 6 milisegundos (fase «on») seguidos de periodos de reposo (fase «off»). Vacuum/vacío Define la magnitud de la presión negativa generada en la línea de aspiración; se expresa en milímetros de mercurio (mmHg). El vacío es la fuerza de la fluídica que condiciona la fuerza con la que el material es adherido a la punta del facoemulsificador una vez ocluida la misma por fragmentos de cristalino. Venting/descarga Fenómeno por el cual se introduce fluido o aire en el circuito de aspiración de un equipo de facoemulsificación cuando se alcanza el nivel de vacío preestablecido; puede lograrse de forma voluntaria por parte del cirujano regresando a posición 2 ó 1 del pedal. El uso de aire para tal fin tiene el inconveniente de aumentar la compliance del sistema en relación con el uso de fluido; una mayor compliance incrementa el rise time y disminuye la capacidad de respuesta del equipo a los desplazamientos ejercidos en el pedal. Venturi pump/bomba venturi Tipo de bomba de vacío en la que un gas comprimido pasa a través del sistema que genera un movimiento de fluido en la línea de aspiración. BOMBAS Constituyen uno de los elementos fundamentales de los aparatos de facoemulsificación; son las responsables de generar el vacío en el sistema. Se reconocen tres sistemas básicos de bombas (Tabla I): 1) Bombas de flujo; 2) Bombas de vacío; y 3) Bombas híbridas. 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS tema peristáltico en relación con el flujo y sin oclusión7 y demostrado que, a elevados flujos, pueden generar cierto nivel de vacío casi instantáneo8. 2. Con oclusión: condiciona la fuerza con la que el material es retenido en la punta del tip o en la punta de irrigación-aspiración y la deformación que puede producirse en los tubos de la línea de aspiración que condicionarán el surge postoclusión. Entre las bombas de flujo, las más extendidas son: Tabla I. Sistemas básicos de bombas de facoemulsificación Bombas de flujo Bombas de vacío Bombas híbridas • Peristálticas • Scroll • Combinan ambos tipos • Venturi • Diafragmáticas • Rotary Vane Pump Existen algunas diferencias «tradicionales» (Tabla II) entre las bombas peristálticas (prototipo de bomba de flujo) y las bombas tipo venturi (prototipo de bomba de vacío); es cierto que algunas de dichas diferencias han cambiado en los nuevos modelos de facoemulsificadores, la mayoría de los cuales intenta incorporar algunas de las ventajas de las que a priori les deberían resultar ajenas en base al tipo de bomba que incorporan. Bombas de flujo El prototipo de bomba de flujo es la bomba peristáltica. En las bombas de flujo podemos ajustar tanto el flujo de aspiración como el nivel de vacío. El flujo de aspiración puede ser ajustado directamente en la consola de facoemulsificación y controlado a través del pedal. Nosotros podemos también preestablecer en la misma consola el nivel máximo de vacío con el que deseamos trabajar pero su control es indirecto: el nivel de vacío en cada momento dependerá del grado de oclusión del tip. Con las bombas peristálticas es posible un control independiente de flujo y vacío. Los ajustes del flujo proporcionarán las siguientes características según cómo se encuentre la línea de aspiración: • Sin oclusión: al aumentar el flujo, aumentará la intensidad de atracción de los fragmentos hacia el tip, pudiendo decirse que mejora la followability de la facoemulsificación. • Con oclusión: los ajustes del flujo condicionarán el rise time del equipo; a mayor flujo, menor tiempo para alcanzar el vacío prefijado. Los ajustes del vacío también ejercerán su peculiar influencia según exista o no oclusión: 1. Sin oclusión: se acepta, al menos teóricamente, que no existiendo oclusión los ajustes del vacío no presentan efectos durante la cirugía. No obstante, ya había sido observado que se puede generar vacío en un sis- 1. Bombas peristálticas Es el tipo de bomba de flujo más extendido en la cirugía de catarata en el momento actual. Este tipo de bombas presentan un conjunto de rodillos montados en disposición circular y que comprimen de forma alternativa el sistema de tubos de la línea de aspiración (Fig. 3): la mencionada compresión genera una atracción del fluido dentro del tubo y genera vacío. La velocidad de rotación de los sistemas de tubos determina la velocidad de flujo. Una ventaja manifiesta de las bombas peristálticas es que permiten un control independiente de la velocidad de aspiración y del nivel de aspiración. Con una bomba de flujo, el cirujano preestablece la velocidad del flujo de aspiración (aspiration flow rate)(cc/min) y los límites del nivel de vacío (vacuum)(mmHg). Fig. 3. Diagrama de bomba peristáltica. Un sistema de rodillos (1) comprime de forma alternante el sistema de tubos y genera el movimiento de fluidos en su interior desde la línea de entrada (2) hasta la línea de salida o drenaje (3). Tabla II. Diferencias «tradicionales» entre bombas peristálticas y venturi Bombas peristálticas Bombas venturi 1. 2. 3. 4. 5. 1. 2. 3. 4. 5. Basadas en flujo Control independiente de flujo y vacío El vacío se genera al ocluir el tip El flujo es constante hasta la oclusión Drenan a un bolsa Basadas en vacío No es posible el control independiente de flujo y vacío El vacío se genera automáticamente a través de una bomba El flujo varía con el nivel de vacío Drenan a un cassette rígido 561 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Algunas consideraciones en relación con la velocidad del flujo de aspiración (Tabla III): 1. Incrementando la velocidad del flujo de aspiración se logra que los acontecimientos ocurran más rápidamente: los fragmentos nucleares son atraídos al tip de forma más poderosa y rápida. 2. Incluso en completa oclusión del tip, y cese por lo tanto de circulación de fluido por la línea de aspiración, la velocidad de flujo es importante en cuanto condicionará el tiempo (rise time) requerido para alcanzar el nivel de vacío preestablecido una vez la oclusión es completa. 3. Aún no existiendo oclusión, si utilizamos altos niveles de flujo aumenta la resistencia dentro de la línea de aspiración y se genera cierto nivel de vacío8, hecho que no se produce a flujos bajos; al regresar, con el pedal, a posición 0 ó 1, se equilibran las presiones entre la cámara anterior y la línea de aspiración. 4. Niveles bajos de flujo (menores de 20-25 cc/min, por ejemplo) enlentecen la cirugía pero permiten reaccionar al cirujano en el caso de capturas inadvertidas de iris o cápsula. 5. Niveles altos de flujo (superiores a 30-35 cc/min) hacen que la cirugía sea más rápida y agresiva, mayor rapidez para alcanzar, en oclusión, los niveles preestablecidos de vacío y mayor riesgo de daño irreparable ante capturas inadvertidas de estructuras no deseadas. Respecto al nivel de vacío (Tabla III): 1. Los límites de vacío preestablecido no se alcanzan automáticamente; para alcanzarlos es necesario que la línea de aspiración se encuentre ocluida, como hemos mencionado. Tabla III. Relación entre bomba, parámetros, oclusión y efecto esperado Bombas de flujo Vacío (mmHg) ¿Oclusión? No Sí Mejora followability Mejora rise time No Sí Ninguno Favorece la sujeción en el tip ↓ Flujo (cc/min) Ajuste ↓ Parámetro Efecto Bombas ventura Parámetro Ajuste Flujo (cc/min) No es posible Vacío (mmHg) ¿Oclusión? No ↓ Sí 562 Efecto Controla flujo, mejora followability Favorece la sujeción en el tip 2. La regulación del nivel de vacío dependerá de9: 1) El grado de oclusión del tip; 2) Del diámetro de la línea de aspiración; y 3) Del máximo nivel de vacío preestablecido en la consola. Aunque mencionábamos (Tabla II) que el sistema de aspiración de las bombas peristálticas drenaban en un bolsa, es cierto que los nuevos equipos (Legacy® e Infiniti® de Alcon, por ejemplo) incorporan un cassette en dicha línea con canales rígidos que evitan el colapso reduciendo así la compliance del sistema y permitiendo un más preciso control de la dinámica de fluidos. Las bombas peristálticas han sido asociadas a ciertas limitaciones, entre las que destacaríamos: 1. Los tubos del sistema de aspiración de un sistema peristáltico deben ser compresibles para permitir su deformación bajo el efecto de los rodillos y generar una fuerza de aspiración que movilice el fluido; pero a mayor compresibilidad existe más riesgo de poder generar el fenómeno conocido como surge. 2. Si el contacto entre el rodillo y el tubo es insuficiente (tal fenómeno puede suceder por incorrecta colocación del tubo o por velocidad excesiva/flujo elevado de los rodillos), el fluido dentro de la línea es más lento que la velocidad de los rodillos Se han intentado superar dichas limitaciones con diferentes estrategias: 1. Utilización de dos tipos de tubos, de diferente compresibilidad, en la línea de aspiración: uno menos compresible para disminuir el riesgo de surge y uno más blando y compresible para la zona de los rodillos de la bomba peristáltica. Fue la estrategia utilizada por Alcon, en su equipo Legacy®, y por AMO. 2. Eliminando el contacto entre el tubo y los rodillos, como por ejemplo se ha logrado en el equipo Infiniti® de Alcon con su Fluid Management System® que utiliza un cassette rígido con una membrana polimérica sobre la que giran los rodillos. 3. Uso de software que compensa tales limitaciones como en el sistema Advanced Flow System® de Bausch&Lomb. 2. Bomba scroll/rollo Es el tipo de bomba que utiliza el módulo Concentrix® del equipo Millenium® de Bausch&Lomb. Surgió de un intento de mejorar algunas de las limitaciones de las bombas peristálticas. Su fundamento se basa en la inclusión de un elemento rígido en rotación orbital dentro del circuito de fluido. Contenido en un sistema de paredes rígidas, existe un sistema móvil similar a un rollo o pergamino que en una primera fase permite la entrada de fluido, para en una segunda aislarlo y, en una tercera, liberarlo en el punto de salida (Fig. 4). Este sistema permite utilizar tubos poco compresibles, disminuyendo con ello el riesgo de surge, y además el ajuste del sistema rotacional puede ser más preciso que en una bomba 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Fig. 5. Esquema bomba venturi. Puede observarse como la circulación de un gas (1), facilitada por la apertura de un sistema valvular, genera una succión en el sistema de aspiración (2) haciendo circular los fluidos. Fig. 4. Bomba scroll. En un sistema rotacional orbital se produce la circulación de fluidos dentro de la línea de aspiración; en la primera fase de llenado (A) entra el fluido, que tras una fase de aislamiento (B) experimenta finalmente otra de vaciamiento (C) con salida del líquido del sistema, volviendo a inciarse toda la secuencia. Un sistema de este tipo debe disponer de un contenedor rígido y fijo (1) con una entrada desde la línea de aspiración (2), un elemento en movimiento orbital en su interior (3) que será el responsable de la entrada y salida de líquidos en el sistema y una zona para la salida de líquidos (4) del circuito. peristáltica; tales características hacen que este tipo de bombas, siendo bombas de flujo, puedan emular a las bombas de vacío. Bombas de vacío El prototipo de este tipo de bombas es la bomba venturi. En este tipo de bombas (Fig. 5), un gas comprimido pasa a través del sistema y genera, con ello, un vacío. La velocidad de paso del gas a través del sistema genera un mayor o menor nivel de vacío que es transferido a la línea de aspiración. Las bombas de vacío, como las venturi que nos ocupan, sólo permiten el control del nivel de vacío. El control de flujo es dependiente del nivel de vacío seleccionado: con las bombas venturi no es posible un control independiente de flujo de aspiración y vacío. Veamos el comportamiento de este tipo de bombas con los ajustes del vacío sabiendo que es el único ajuste posible (Tabla III): 1. Sin oclusión: variando el vacío se modifica la velocidad de aspiración; a mayor nivel de vacío, mayor intensidad y velocidad de atracción de las masas que existen en cámara anterior hacia la punta del tip. 2. Con oclusión: al igual que sucede con las bombas de flujo, también en estos casos el nivel de vacío condiciona la fuerza de la presa de los fragmentos sobre el tip. Las bombas venturi siempre han sido reconocidas como muy útiles en las técnicas quirúrgicas que requieren elevados niveles de vacío y más rápidas que las peristálticas en alcanzar los niveles de vacío preestablecidos cuando se produce la oclusión10. Tales diferencias con las bombas peristálticas son hoy menos evidentes, y probablemente de escasa relevancia clínica, principalmente por la evolución de éstas últimas. Bombas híbridas Tipo de bombas de reciente creación y que, independientemente del diseño original del tipo de bomba, pueden trabajar como bombas de flujo o como bombas de vacío; tal posibilidad se logra a través de un sistema de programación específico. TRANSDUCTORES Como mencionábamos, un transductor es un sistema capaz de convertir una señal eléctrica en energía mecánica. En facoemulsificación se manejan básicamente dos sistemas: 1) Transductores magnetoestrictivos; 2) Transductores piezoeléctricos. Transductores magnetoestrictivos Están basados en láminas ferromagnéticas rodeadas por una bobina eléctrica. El campo magnético inducido por la corriente eléctrica genera la oscilación de las láminas. Entre las ventajas de este tipo de transductores, destacamos: 1) Excitación del sistema libre de contacto físico, 563 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Fig. 6. Aspecto externo de diferentes mangos de facoemulsificación. Siendo similares, presentan pequeñas diferencias externas. 6.1. Mango de facoemulsificación del equipo Infiniti® de Alcon. 6.2. Mango de facoemulsificación del equipo Stellaris® de Bausch&Lomb. 6.3. Mango de facoemulsificación del equipo Signature® de AMO. evitando o retrasando el deterioro del sistema; y 2) Larga vida media. Entre las desventajas: 1) Baja eficiencia: sólo una pequeña parte de la energía se transforma en acción mecánica; y 2) Elevada generación de calor. En los primeros mangos que utilizaban tales transductores se hacía necesario dedicar parte de la corriente de fluido a refrigerar el sistema, siendo necesario dedicar a tal fin un sistema de refrigeración independiente; actualmente, con la utilización de otros metales ferromagnéticos y nuevos diseños se ha logrado mejorar la eficiencia de la energía y disminuir el calor generado y se ha evitado la necesidad de dedicar sistemas independientes de refrigeración al transductor. Transductores piezoeléctricos Estos transductores están basados en la inversión del fenómeno piezoeléctrico. Algunos cristales, al comprimirse, generan corriente eléctrica; de forma inversa, la corriente eléctrica obliga a los cristales a comprimirse. Aplicando corriente de alta frecuencia a un cristal, éste oscilará a esa frecuencia. Los cristales son montados en un tubo de diámetro decreciente que acaba en la unión con la punta de facoemulsificación; el diámetro decreciente del tubo actúa como un amplificador para generar una adecuada potencia de facoemulsificación. Las ventajas de este sistema son: 1) Alta eficiencia del sistema; 2) Escasa generación de calor; y 3) Escaso peso, rápido movimiento y fácil control del dispositivo. Las mencionadas ventajas hacen innecesaria la refrigeración suplementaria del sistema. Los sistemas modernos son controlados por señales digitales para generar potencia; el control digital es más preciso e instantáneo. Sus desventajas: 1) Conexiones entre cristal y corriente eléctrica; 2) Fragilidad de los cristales. Estas desventajas se traducen en la limitada vida media de estos transductores que pueden estropearse ante ligeros golpes o por la oscilación generada dentro del sistema. MANGOS DE FACOEMULSIFICACIÓN Los mangos de facoemulsificación, siendo parecidos, presentan ciertas diferencias entre equipos (Fig. 6). Todos deben tener un sistema interno, el transductor, que convierte la energía eléctrica en mecánica y vías de circulación para asegurar una vía de irrigación y una vía de aspiración. El transductor convierte la energía eléctrica en mecánica, la vía de irrigación asegura el flujo de fluido desde la botella de irrigación al interior del ojo y la vía de aspiración asegura la evacuación de los fragmentos del cristalino hacia el cassette de drenaje. Loa mangos se diferencian en estructura externa, diámetro, morfología, peso, centro de gravedad y disposición de la vía de irrigación (el resto de los sistemas suelen ser internos). Tales características condicionan su ergonomía y hacen que presenten pequeñas diferencias durante los procedimientos quirúrgicos. Realmente sus diferencias no suelen ser notables. MANGOS DE IRRIGACIÓN/ASPIRACIÓN Al igual que sucede con los mangos de facoemulsificación, los mangos de irrigación-aspiración (Fig. 7) tampoco presentan grandes diferencias entre equipos. Internamente no presentan ningún sistema electrónico ni otro dispositivo especial y únicamente están dotados de una vía de irrigación y una vía de aspiración. Difieren también en su aspecto externo y en sus características ergonómicas. PEDAL DE FACOEMULSIFICACIÓN Fig. 7. Aspecto externo de diferentes mangos de irrigación-aspiración. Las diferencias, como se puede apreciar, son mínimas. 7.1. Mango de irrigación-aspiración del equipo Infiniti® de Alcon. 7.2. Mango de irrigación-aspiración del equipo Stellaris® de Bausch&Lomb. 564 El pedal de facoemulsificación permite el control de las diferentes fases de la facoemulsificación por manipulación con el pie. En los últimos años, el pedal ha pasado de permitir únicamente el control de irrigación, aspiración y facoemulsificación a incorporar otra serie de elementos que permiten el control de otras muchas funciones (Fig. 8). 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Tabla IV. Control de fases con el pedal de facoemulsificación Posición 0 1 2 3 Fig. 8. Aspecto externo de diferentes pedales de equipos de facoemulsificación. En este caso las diferencias son algo más aparentes que las observadas en mangos de facoemulsificación e irrigación-aspiración. 8.1. Pedal del equipo Infiniti® de Alcon. 8.2. Pedal del equipo Stellaris® de Bausch&Lomb. 8.3. Pedal del equipo Signature® de AMO. Entendemos sería más correcto diferenciar el pedal en diferentes usos: 1) Facoemulsificación; 2) Irrigación-aspiración; 3) Vitrectomía anterior; y 4) Diatermia. El pedal, en cada uso, tiene diferentes funciones en cada una de sus posiciones y sería necesario conocerlas todas adecuadamente. Identificación Función Reposo Irrigación Aspiración Facoemulsificación No hay flujo Entrada de fluidos Entrada y salida de fluidos Entrada y salida de fluidos y facoemulsificación mulsificación, tal y como se explica en otros apartados. Algunos equipos tienen la posibilidad de trabajar en irrigación continua; con esta opción, al menos en teoría pues pudiera eliminarse con uno de los manipuladores laterales del pedal, no existiría posición 0 o de reposo pues la irrigación sería permanente evitando los colapsos de la cámara anterior. Recordaremos las diferentes posiciones básicas del pedal y los controles que permiten en los equipos de facoemulsificación habituales. Aunque se habla de posiciones sólo la posición 0 corresponde a una posición real, las demás situaciones (1, 2 y 3) más que a posiciones propiamente dichas corresponden a trayectos y recorridos del pedal. Mencionaremos aquellos aspectos generales que son aplicables a la mayor parte de los equipos. Las posiciones básicas del pedal en cualquier facoemulsificador son: 1. Posición 0 Corresponde a la posición de reposo de cualquier facoemulsificador y el cirujano no ejerce ninguna presión sobre el Pedal en modo facoemulsificación En los primeros equipos, el pedal sólo permitía un avance lineal en cuatro posiciones, siendo ésta su función básica. El recorrido en cuatro tramos permite manejar diferentes funciones que controlan la irrigación, la aspiración y la facoemulsificación; las mencionadas funciones entran de forma progresiva. Dichas fases (Tabla IV) (Fig. 9.1) son: 0. Reposo, donde el pedal se encuentra en su posición más alta o de reposo, donde no hay movimiento de fluidos y, por lo tanto, la irrigación se encuentra cerrada y la bomba no está en funcionamiento; 1. Irrigación, inicia la entrada de suero en el sistema, por liberación del dispositivo que cierra la línea de irrigación, pero la bomba no entra aún en funcionamiento; 2. Aspiración, aunque en realidad se suma la aspiración a la irrigación ya iniciada, la irrigación está liberada y la bomba de aspiración entra en funcionamiento; y 3. Facoemulsificación, donde, en teoría, coexistirían irrigación, aspiración y facoemulsificación, con irrigación liberada y bomba de fluidos y transductor en pleno funcionamiento. No obstante, en las posiciones 2 y 3 del pedal entra otra variable en juego, la oclusión, que incide sobre la irrigación, la aspiración e incluso la facoe- Fig. 9. Posiciones básicas del pedal en facoemulsificación. Se representan las posiciones y las funciones activas en cada tramo del pedal. 9.1. Posiciones básicas. Recordaremos que el punto 0 corresponde a la posición de reposo, la 1 a la posición de irrigación, la 2 a la de aspiración y la 3 a la de facoemulsificación. 9.2. Funciones activas en cada tramo. En la posición 0 no hay función (salvo en modo irrigación continua), en la posición 1 está activada la irrigación (I), en la posición 2 la irrigación y la aspiración (I,A) y en la posición 3 se activan irrigación, aspiración y facoemulsificación (I,A,U/S). 565 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN pedal. En esta posición, conocida como de reposo, la vía de irrigación se encuentra cerrada por un dispositivo que la obstruye externamente por compresión de las gomas de la vía de irrigación. Básicamente, la posición 0 es la posición en la que podemos mantener el equipo cuando no estemos dentro del ojo. En dicha posición y dentro del ojo, y por las pérdidas incisionales, la tendencia al vaciamiento de la cámara anterior y al colapso son la norma, poniendo en riesgo al endotelio y a la cápsula posterior. Durante la facoemulsificación sólo se recurre a dicha posición ante emergencias, como la captura del iris o de la cápsula, y sólo como situación intermedia hacia el reflujo. Hemos mencionado que algunos equipos permiten el modo irrigación continua; en esta posición, la vía de irrigación se encuentra siempre liberada y evita los colapsos de cámara anterior pero también hay mayor pérdida de fluidos y el cirujano no puede renunciar a la irrigación en ninguna situación incluso dejando de pisar el pedal. En los equipos actuales existe la posibilidad de presionar uno de los dispositivos laterales del pedal para cortar la irrigación continua. 2. Posición 1 Es conocida como posición de irrigación. El cirujano, a través del pedal, controla la entrada en esta fase. En posición 1, se libera el dispositivo que obstruye la vía de irrigación y el fluido presuriza la cámara anterior, en mayor o menor medida, en función de la altura de la botella y de las pérdidas incisionales. Supuesto un sistema teórico y cerrado herméticamente, cuando la presión de la cámara anterior igualara a la presión hidrostática, presión correspondiente a la columna de la altura de fluido, el flujo cesaría; sin embargo, las pérdidas incisionales suelen ser la norma y, por ello, siempre existe cierto nivel de flujo: entrada desde la vía de irrigación y salida por pérdidas incisionales. 3. Posición 2 Aunque conocida como posición de aspiración, en realidad es una posición de irrigación-aspiración. En este recorrido del pedal entra en funcionamiento el sistema de bomba, los rodillos a rotar en un sistema peristáltico y el gas a fluir en un sistema venturi. De este modo, en ambos sistemas, se genera flujo mientras no se ocluya la línea de aspiración. Al ocluir la línea de aspiración, con fragmentos del cristalino, cesa el flujo, salvo el que permitan las pérdidas incisionales. Con la oclusión, se genera vacío en la línea de aspiración, vacío que constituye la fuerza de sujeción de fragmentos en la punta del tip. En las bombas de flujo (en general, peristálticas), los rodillos giran a velocidad constante, en modo panel y según el flujo programado en la consola, a lo largo de la posición 2. En una bomba de vacío, tipo venturi, con control lineal es posible alcanzar dicho vacío, con incremento progre566 sivo del flujo, según avanzamos en el recorrido del pedal en posición 2 y en modo no ocluido. Las nuevas bombas de flujo de los nuevos equipos, como por ejemplo el Infiniti® de Alcon, permiten el control lineal tanto de flujo como de vacío a lo largo de la posición 2, pasando automáticamente de control lineal de flujo sin oclusión a control lineal de vacío con oclusión. 4. Posición 3 En esta posición o recorrido, es la posición en la que se genera energía ultrasónica, siendo una posición de irrigaciónaspiración-ultrasonido. Las formas básicas de liberación de ultrasonido son panel y lineal; en la primera, panel, al inicio de la posición 3 entra toda la potencia de ultrasonido programada y en la segunda, lineal, la potencia entra según avanzamos en el recorrido de dicha posición, alcanzado el máximo prefijado en la consola al final del recorrido. También existen múltiples y nuevas formas de liberación de energía de facoemulsificación que serán tratadas en el apartado correspondiente. Es necesario advertir que las posiciones del pedal han sido descritas en términos de funcionamiento básico del mismo en cada una de sus posiciones. Pero la facoemulsificación es un procedimiento dinámico y sus variables cambian a lo largo del mismo. Sus funciones se superponen y en los diferentes trayectos se suman nuevas funciones que complementan a los anteriores (Fig. 9.2) y, además, es posible complementar las funciones del pedal con las preprogramaciones de la consola que ya permiten no sólo controlar si queremos modo lineal o panel sino también predefinir los recorridos que queremos para cada una de las posiciones siendo posible una auténtica personalización de los parámetros de la facoemulsificación y de su forma de usarlos por control a través del pedal. En posiciones 2 y 3, la irrigación, la aspiración, la facoemulsificación, la oclusión y la eficacia del equipo tanto para destruir fragmentos del cristalino como para controlar el surge, condicionarán la situación dinámica dentro de la cámara anterior. Así, la oclusión y la gestión de su control, tanto durante como inmediatamente después de la misma, se erigen en puntos de la máxima relevancia durante la facoemulsificación. Pedal en modo irrigación-aspiración En este uso, el pedal solo tiene tres posiciones: 0, 1 y 2 (Tabla V). Dichas posiciones corresponden a las posiciones descritas en modo facoemulsificación; evidentemente, no existe posición 3 (ultrasonido). Para adaptarse a esta situación, el recorrido del pedal en posición 2 engloba el trayecto de las posiciones 2 y 3 del modo facoemulsificación (Fig. 10). Sin embargo, la correspondencia dinámica no es absoluta para unos mismos parámetros dado que cambian los diámetros de tips y manguitos así como el tamaño de los orificios de irrigación y aspiración. 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Tabla V. Control de fases con el pedal de irrigación-aspiración Posición 0 1 2 Identificación Función Reposo Irrigación Aspiración No hay flujo Entrada de fluidos Entrada y salida de fluidos Pedal en modo vitrectomía Tabla VI. Control de fases con el pedal en modo vitrectomía Posición 0 1 2 2 3 3 Identificación Función Reposo Irrigación Aspiración Corte Corte Aspiración No hay flujo Entrada de fluidos Entrada y salida de fluidos Entrada de fluidos y corte Entrada y salida de fluidos y corte Entrada de fluidos, corte y salida de fluidos Con las terminales de vitrectomía, el pedal vuelve a tener cuatro posiciones como en el caso de la facoemulsificación; la posición 3 no corresponde a la liberación de energía ultrasónica sino a otros usos. Las posiciones 0 (reposo) y 1 (irrigación) cumplen las mismas funciones que con terminal de facoemulsificación e irrigación-aspiración; las posiciones 2 y 3 pueden cambiar sus funciones (Tabla VI) según el modo de vitrectomía escogido: 1. Modo irrigación-aspiración-corte En este modo, la posición 2 activaría la aspiración y la posición 3 activaría el corte (Tabla VI, secuencia gris). Es el modo utilizado para aspirar masas y el modo en el que sólo activamos el corte cuando alguna mecha vítrea obstruye la vía de aspiración. 2. Modo irrigación-corte-aspiración En esta situación, la posición 2 se utiliza para cortar el vítreo y evitar tracciones sobre el mismo y la posición 3 activaría la aspiración (Tabla VI, secuencia roja). Fig. 10. Posiciones básicas del pedal en irrigación-aspiración. Posiciones y funciones activas en cada tramo. 10.1. Posiciones básicas. Recordaremos que el punto 0 corresponde a la posición de reposo, la 1 a la posición de irrigación, la 2 a la de aspiración y equivale a los trayectos 2 y 3 del pedal en posición facoemulsificación. 10.2. Funciones activas en cada tramo. El punto 0 corresponde a la posición de reposo, la 1 a la posición de irrigación y la 2 a la de irrigación-aspiración. Las funciones activas son: irrigación (I) en posición 1 e irrigación-aspiración (I,A) en posición 2. Obsérvese que no existe posición 3 del pedal. Pedal en modo diatermia Este modo es actualmente de poco uso en facoemulsificación, sobretodo desde la generalización de las incisiones corneales. El pedal sólo tiene dos posiciones: 0 y 1. En posición 0 no funciona la diatermia y en posición 1 entra en funcionamiento según los parámetros seleccionados en la consola. Otros usos del pedal Los nuevos pedales ofrecen nuevas posibilidades, más complejas y diferentes según los equipos. Por ejemplo, en la Tabla VII quedan recogidas las múltiples posibilidades de control de funciones que permite el equipo Infiniti® de Alcon a través del pedal. Los nuevos pedales pueden ser usados por el cirujano para controlar múltiples funciones quirúrgicas; en general, el control a través del pedal dependerá del modo de tra- bajo seleccionado en la consola y las diferentes funciones se activan automáticamente según deprimamos el pedal. Los pedales convencionales de facoemulsificación han sido utilizados únicamente en un plano, respondiendo a la presión progresiva del pie como en un acelerador de coche, y los parámetros elegidos se incorporan a la técnica de forma progresiva y secuencial. Los nuevos modelos han ido incorporando pulsadores adicionales en sus laterales y funciones alternativas cuando se usan con movimientos torsionales del pie. Por ejemplo, el pedal del equipo Infiniti® de Alcon tiene, además del modo de pulsación habitual, otras seis opciones de pulsación diferentes; cinco de ellas programables, la sexta es fija y corresponde al reflujo. Los pulsadores pueden ser activados unos por presión vertical y otros por movimientos laterales. Si no se pisa el pedal podemos acceder a cualquiera de las funciones, pisando el pedal las opciones son excluyentes; si pisamos el pedal, y dependiendo del modo de operación, sólo tendremos acceso a algunas funciones. 567 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Tabla VII. Control de funciones con el pedal del equipo Infiniti® de Alcon Control de funciones quirúrgicas con el pedal Posición del pedal Modo Faco o NeoSonix® o Ozil® o Aqualase® 0 1 2 3 Reposo Irrigación Irrigación/aspiración Irrigación/aspiración Faco: potencia NeoSonix: amplitud Ozil: amplitud Aqualase: magnitud Irrigación continua Reposo I/A Coagulación Irrigación/aspiración Irrigación continua Irrigación/aspiración Irrigación Irrigación continua Reposo I/corte/A Irrigación/aspiración Faco: potencia NeoSonix: amplitud Ozil: amplitud Aqualase: magnitud Irrigación Reposo I/A/corte Irrigación/aspiración Irrigación/aspiración Irrigación/aspiración Irrigación Irrigación continua Irrigación/aspiración/corte Irrigación/aspiración/corte Irrigación/corte Irrigación/corte/aspiración Irrigación/corte Reposo Otra variante de uso del pedal es el sistema conocido como Dual linear pedal o pedal dual lineal (incorporado en los equipos Millenium® y Stellaris® de Bausch&Lomb) que separa fluídica y ultrasonidos en dos planos de movimiento del pe- Irrigación/corte/aspiración Coagulación dal y así permite un control independiente de fluídica (en general, con desplazamientos de arriba abajo del pedal) y de ultrasonidos (en general, con desplazamientos laterales del pedal) o un control combinado de ambos. FÍSICA PARA OFTALMÓLOGOS El entender los entresijos de la facoemulsificación obliga a revisar algunos conceptos elementales de dinámica de sólidos y fluidos y los fundamentos de la potencia de los ultrasonidos. Dinámica de sólidos Fig. 11. Potencia de facoemulsificación. El recorrido máximo de la punta de facoemulsificación es entendido como potencia del 100%; una vez precalibrada la potencia, su control se ejerce a través del pedal. Es posible predefinir la potencia que deseamos utilizar que, en general, representará porcentajes del recorrido máximo posible. Se representan: 1. Posición de reposo (potencia 0) (A); 2. Avance de la mitad del recorrido posible (potencia 50%) (B); y 3) Máximo recorrido posible (potencia 100%) (C). Simulaciones exageradas para su comprensión. 568 Siempre que revisamos los fundamentos de la facoemulsificación nos centramos en la dinámica de fluidos. Entendiendo que la dinámica de fluidos es fundamental para una adecuada comprensión de la facoemulsificación, no es menos cierto que también se aplican ciertos principios newtonianos aplicados a la dinámica de sólidos. El efecto del tip del facoemulsificador ha sido interpretado como similar al efecto que ejerce un martillo perforador o percutor sobre una superficie sólida; en nuestro caso, el cristalino. La punta de facoemulsificación oscila a una frecuencia constante que, dependiendo de equipos, varía entre 28,5 y 40 kHz; dicha frecuencia de oscilación es propia de cada máquina y, en general, no puede ser ajustada. La forma habitual de ajustar la potencia de facoemulsificación es modificando el recorrido posible de la punta de facoemulsificación (Fig. 11); 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS preseleccionamos una potencia deseada, en porcentajes, y posteriormente controlamos con el pedal la utilización de dicha potencia: con el pedal apretado a su posición máxima lograríamos el máximo de la potencia preseleccionada. El control lineal, a través del control del recorrido del pedal, de la potencia de facoemulsificación se relaciona de forma también lineal con el recorrido de la punta de facoemulsificación y no con la frecuencia de vibración. Es necesario mencionar que las potencias utilizadas y registradas por cada aparato de facoemulsificación ni se encuentran estandarizadas ni son verdaderas medidas de la potencia real utilizada y, por ello, resulta poco preciso comparar equipos en base a tal criterio; cada máquina produce una diferente potencia para su calibración 100% y dicha potencia varía en función del voltaje, de la ergonomía de mango y puntas, de la eficiencia de los sistemas piezoeléctricos, de la relación de amplificación ultrasónica, de las pérdidas por fricción y de otros factores. En física: «La fuerza es definida como la causa capaz de provocar deformaciones o aceleraciones en los cuerpos, realizándose tales efectos por contacto del agente productor con el cuerpo o transmitidas a distancia en los llamados campos de fuerza». Y también, según la ley de Hooke: «Las deformaciones producidas en los cuerpos, son directamente proporcionales a las fuerzas que actúan». Hay símiles con la facoemulsificación; la fuerza sería la potencia de facoemulsificación: 1) Si es suficiente para superar las resistencias pasivas (rozamientos) del cristalino, lo deformará y será capaz de destruirlo, al menos en sus zonas de contacto (Fig. 12.1); 2) Si no puede superar las resistencias del cristalino, ejercerá cierta aceleración (repulsión) sobre el mismo (Fig. 12.2); y 3) De la relación entre fuerza del facoemulsificador y resistencia del cristalino se pueden producir situaciones intermedias que combinen destrucción y repulsión en diferentes proporciones (Fig. 12.3). Es fácil deducir que si no hay destrucción de los fragmentos del cristalino habrá desplazamiento del mismo y aumento del riesgo de desinserción zonular por tracción. Las fuerzas gozan de tres atributos: 1) Módulo o intensidad; 2) Dirección; y 3) Sentido. Son, por tanto, magnitudes vectoriales. Su mayor efecto se logrará a mayor módulo y cuando su dirección y sentido coincidan con la dirección y sentido deseados. También recordaremos la ecuación fundamental de la dinámica (Tabla VIII): «La fuerza es igual a la masa por la aceleración». En facoemulsificación, la eficacia de un determinado tip es proporcional a su masa y a su aceleración; sin embargo, dado que dicha eficacia no puede ser entendida exclusivamente con criterios mecánicos, también la zona de radiación de la energía de facoemulsificación del tip debería ser considerada: con puntas convencionales dicha zona quedará limitada a la sección de la misma y con otros diseños, que modifican su masa y diseño para aumentar la zona de radiación, se consigue la misma eficacia con menor uso de energía logrando, así, disminuir el riesgo de provocar daño térmico. Aplicaremos estos principios al revisar aspectos relacionados con la potencia y efecto de la facoemulsificación. Fig. 12. Relación entre potencia de facoemulsificación y resistencia del cristalino. Del balance entre ambas predomina la destrucción del cristalino o su desplazamiento. 12.1. Potencia > resistencia. Toda la energía se transforma en destrucción del cristalino y apenas hay desplazamiento de este. 12.2. Potencia < resistencia. Hay más desplazamiento que destrucción del cristalino. 12.3. Potencia = resistencia. Hay destrucción y desplazamiento. Dinámica de fluidos Una fluídica correcta de un equipo de facoemulsificación debería permitir la destrucción y aspiración de la catarata manteniendo la configuración de la cámara anterior normal y estable y evitando, en cualquier circunstancia dinámica, su colapso durante la intervención quirúrgica. Para ello, debe establecerse un balance entre el líquido que entra en cámara anterior, a través de la vía de irrigación, y el que la abandona, bien a través de la vía de aspiración o por pérdidas incisionales. Se hace necesario manejar algunos conceptos; entre ellos: 1) Flujo; y 2) Vacío. Es obligatorio conocer los principios aplicables a fluidos newtonianos; los líquidos utilizados son entendidos como soluciones no comprensibles y los conceptos propios de los flujos laminares dentro de un sistema de tubos de paredes rectas e inelásticas son los que deberíamos manejar. Tabla VIII. Ecuación fundamental de la dinámica F=mxa Siendo: F = fuerza m = masa a = aceleración 569 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Los principios de tal ecuación son aplicables a la facoemulsificación aunque también es cierto que cuando en el sistema se introducen fragmentos de cristalino o sustancias viscoelásticas se producen fenómenos propios de flujos no laminares; la reducción a tratar únicamente la dinámica de flujos laminares la haremos en un intento de facilitar la comprensión de los temas tratados. El aspecto más relevante de cualquier sistema de fluidos que utilicemos es su capacidad para mantener un volumen intraocular constante con una cámara anterior profunda y estable; es decir, un sistema que asegure un adecuado equilibrio entre la irrigación que proporciona y la aspiración que genera. Mantener siempre una cámara anterior estable (Fig. 13) presupone que el volumen de irrigación, dependiente de la altura de la botella y del diámetro de los tubos, supere siempre a la suma del volumen de aspiración, dependiente del diámetro de la vía de aspiración y del nivel de succión que sobre ella se genera, y de las pérdida incisionales. Fig. 13. Mantenimiento de cámara anterior estable. En cualquier circunstancia, el volumen de irrigación (I) debe superar a la suma del volumen de aspiración (A) más las pérdidas incisionales (P). La ecuación de Poiseuille (Tabla IX) nos ayudará a entender la mayor parte de los conceptos que manejaremos. Dado que la viscosidad de la solución utilizada así como la longitud de los tubos son constantes para un determinado caso, las únicas variables que deberían ser consideradas son, para un flujo determinado, los cambios en los niveles de presión o vacío (Δ P) y el radio de los tubos. Dado que en la mencionada ecuación el radio se encuentra elevado a la cuarta potencia, es sencillo suponer que pequeños cambios en el radio de los tubos pueden suponer grandes cambios en el flujo de fluidos para responder a lo enunciado en la ecuación de Poiseuille (Tabla IX). Es evidente que dentro del circuito utilizado en una facoemulsificación existen diferentes niveles de resistencia (línea de irrigación, manguito de irrigación, punta de faco, mango de faco y línea de aspiración), siendo el punto de menor radio donde mayor resistencia se genera. Tabla IX. Ecuación de Poiseuille F = Δ P Π r4 / 8 η L Siendo: F = flujo Δ P = cambio en el nivel de presión/vacío Π = constante matemática pi r = radio del tubo η = viscosidad del fluido L = longitud del tubo 570 DINÁMICA DE FLUIDOS EN LA PRÁCTICA CLÍNICA DE LA FACOEMULSIFICACIÓN Los aspectos de física que hemos mencionado encuentran en la facoemulsificación una de sus aplicaciones prácticas; de ellas hablaremos en los siguientes apartados. Irrigación/entrada de fluidos La irrigación o infusión es el volumen que penetra en cámara anterior desde el sistema de irrigación; hasta el presente, la mayor parte de los sistemas de irrigación están basados exclusivamente en sistemas cuyo fundamento radica en la altura de la botella desde donde el líquido fluye condicionado únicamente por su altura, por motivos gravitacionales, y por el diámetro del tubo de irrigación, del manguito y de la relación de diámetros entre el manguito y la punta de facoemulsificación. Sin embargo, sí que es cierto que el diámetro de los tubos y su elasticidad no condicionan en gran medida el volumen de infusión debido a que rara vez se producen altas presiones en la zona de irrigación dentro del sistema6. Para cumplir con el compromiso de mantener una cámara anterior estable (volumen de irrigación > volumen de aspiración + pérdidas incisionales), habitualmente el diámetro de la vía de irrigación es mayor que el diámetro de la vía de aspiración. Además, la luz de los tubos de irrigación es de mayor diámetro que la de los de aspiración y las paredes de aquellos son menos rígidas que las de estos (Fig. 14). Para controlar el volumen de infusión, los equipos de facoemulsificación tienen la posibilidad de regular la altura de la botella de irrigación; los nuevos equipos indican los cm de elevación de la altura de la botella. Aunque pueda resultar obvio, es necesario recordar que el gradiente de presión (Δ P) generado por la altura de la botella viene condicionado por la dis- 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Tabla X. Relación entre altura de la botella y presión intraocular Altura de la botella de irrigación Presión intraocular Cm Pies mm Hg 200 150 100 75 50 25 15 79 59 39 30 20 10 6 147,2 100,4 73,6 55,2 36,8 18,4 10,0 Tomado de: Zanini9. Fig. 14. Diferencias entre tubos de irrigación y aspiración. Son estrategias para mejorar el control del surge. 14.1. Diferencias entre tubos de irrigación y aspiración. Obsérvese la mayor luz del tubo de irrigación en relación con el tubo de aspiración, en el equipo Infiniti® de Alcon, así como el mayor grosor de la pared del de aspiración. 14.2. Diferencias de tubos de aspiración: habitual vs Intrepid®. Con el nuevos sistema Intrepid®, tales diferencias aún han permitido mejorar más su respuesta frente al surge respecto a los tubos de aspiración previos. tancia entre dicha altura y la posición del ojo del paciente durante la cirugía: el mismo efecto puede ser logrado elevando la altura de la botella como bajando la posición de la mesa de operaciones y con ello la altura del ojo del paciente. Variaciones en la altura de la cabeza del paciente deberían ser compensadas con variaciones similares en la altura de la botella. Una altura adecuada de la botella debería asegurar el mantenimiento de la cámara anterior pero evitar su hiperpresurización (aumenta el riesgo de sufrimiento zonular y síndrome de mala dirección de fluidos, aumenta las pérdidas incisionales y pudiera comprometer el flujo sanguíneo); la altura de la botella condiciona, en definitiva, la presión intraocular durante la cirugía. Se acepta que por cada 15 cm de elevación en la altura de la botella se genera un incremento de presión de 1011 mmHg sobre la presión atmosférica7; este principio es válido como concepto de presión hidrostática en situaciones estáticas (fluido dentro del sistema pero sin movimiento) con sistema de aspiración inactivo y sin pérdidas incisionales o de otro tipo dentro del sistema. En estos casos, la presión dentro del sistema dependerá exclusivamente de la altura de la botella9 (Tabla X). Sin embargo, dicha situación no es la habitual durante una facoemulsificación; por ello, es necesario el ajuste hidrodinámico con la bomba en funcionamiento y sin oclusión del tip pues el flujo de aspiración disminuirá la presión hidrostá- tica generada exclusivamente por la altura de la botella. Llegados a este punto, es necesario recordar el teorema de Bernouilli: «En dos puntos de la misma línea de corriente de un fluido en movimiento, bajo la acción de la gravedad, se verifica que la diferencia de las presiones hidrodinámicas es igual al peso de una columna de fluido que tiene por base la unidad de superficie y por altura la diferencia de alturas entre los dos puntos»; pero nos interesa más una de sus aplicaciones correspondiente a las variaciones de presión por cambios de velocidad: «A todo aumento de velocidad en una línea de corriente horizontal de un fluido en movimiento corresponde una disminución de presión». Por ello, para mantener un equilibrio hidrodinámico, y una cámara anterior estable, sería necesario modificar la altura de la botella cuando se modifique la velocidad (flujo) o el nivel de vacío de la bomba de aspiración. Si la altura de la botella es insuficiente para determinado flujo, la cámara anterior se colapsa debido al vacío generado (presión negativa en relación con la atmosférica); por ello, es necesario recordar que hay que elevar la altura de la botella de irrigación como medida de compensación hidrodinámica cuando aumentamos el flujo; de forma similar, sería conveniente bajarla cuando disminuyamos dicho flujo. Un ejemplo práctico, presuponiendo altura de la botella de irrigación a 45 cm de altura (recordaremos que se generan unos 10 mmHg de presión hidrostática por cada 15 cm de elevación de la botella), en diferentes situaciones dentro de una facoemulsificación (Fig 15): 1. Pedal en posición 0. La vía de irrigación está cerrada y la altura de la botella no influye en la presión intraocular: presión intraocular de 0 mmHg y tendencia al colapso. 2. Pedal en posición 1. Únicamente influye la presión hidrodinámica ejercida por la columna de agua, luego presión intraocular de 30 mmHg y cámara anterior estable. 3. Pedal en posición 2 y tip no ocluido. El flujo de salida genera una disminución de presión, directamente proporcional a dicho flujo, supongamos a 20 mmHg. 4. Pedal en posición 2 y tip ocluido. Se recupera la presión de 30 mm Hg debido a que sólo influirá la presión hidrodinámica. 571 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Fig. 15. Oscilaciones de presión en diferentes situaciones. Para una misma altura de botella (45 cm), obsérvese que la presión intraocular varía en función de la posición del pedal. 15.1. Con el pedal en posición 0 (reposo, vía cerrada). La altura de la botella no genera presión hidrodinámica; si la punta del faco se encuentra en cámara anterior las pérdidas incisionales favorecen la tendencia al colapso. 15.2. En posición 1 (irrigación). Se genera una presión directamente proporcional a la altura de la botella; al no haber aspiración, se profundiza la cámara anterior y sólo habrá flujo si hubiera pérdidas incisionales. 15.3. En posición 2 (irrigación-aspiración) y sin oclusión. El flujo generará disminución en la presión intraocular (dependiente del flujo) que será continuamente compensada por la aportación de líquidos desde la botella de infusión. 15.4. En posición 2 y en oclusión completa. Se recupera la presión intraocular, en relación con la presión hidrostática de la columna de líquido, y se genera vacío en la línea de aspiración hasta alcanzar el vacío máximo prefijado en la consola. Es lógico deducir que con el tip de facoemulsificación en cámara anterior debería evitarse la posición 0 del pedal; de hecho, es habitual entrar en cámara anterior con irrigación activada o utilizar irrigación continua para evitar la posibilidad de colapsos durante la facoemulsificación. 572 Existen también otras formas para aumentar la irrigación (Tabla XI), además de elevar la altura de la botella; algunas de ellas de sentido común como: 1) Bajar la altura de la cabeza del paciente, que ya hemos mencionado; 2) Retirar el sistema antiburbujas del que vienen dotados algunos manguitos 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Tabla XI. Sistemas para aumentar el flujo de irrigación Tabla XII. Factores que condicionan la salida de fluidos Principal Secundarios Principal Secundarios 1. Elevar la altura de la botella de irrigación 1. 2. 3. 4. 1. Extracción por vía de aspiración, condicionada por: 1.1. Tamaño de incisión 1.2. Diámetro de tip y manguito 1.3. Tipo de bomba y ajustes 1.4. Diámetro y compliance del tubo 1. Pérdidas incisionales 2. Otras Bajar altura de la cabeza del paciente Retirar los sistemas antiburbujas Sistemas de irrigación forzada Reducir el diámetro de los tip de irrigación (Fig. 16); 3) Utilizar sistemas de irrigación forzada; y 4) Reducir el diámetro del tip, que permitirá el paso de un mayor volumen de fluido entre el tip y su manguito. Aspiración/salida de fluidos Un principio fundamental de la facoemulsificación: «El volumen total de fluidos que abandona el ojo debe ser inferior al volumen que proporciona la vía de irrigación». En caso contrario, la inestabilidad de la cámara anterior y el colapso son la norma. Por ello, en general, el diámetro de los tubos del sistema de aspiración suele ser menor que el de los tubos de irrigación; sin embargo, la zona de mayor restricción de la vía de salida suele ser el diámetro interno del tip de facoemulsificación y la selección del mismo condicionará los parámetros a ser elegidos para la técnica quirúrgica. A menor radio del tip, menor flujo (recordaremos la ecuación de Poiseuille, tabla IX); para lograr el mismo flujo, a menor radio/diámetro es necesario un incremento sustancial en el gradiente de presión que se genere dentro del sistema. Los cambios en el flujo al Fig. 16. Retirada del sistema antiburbujas. La mayor parte de los manguitos de irrigación del tip de facoemulsificación vienen dotados de tal dispositivo. 16.1. Visión lateral. Es un dispositivo que se localiza en el interior del manguito. 16.2. Visión frontal. Tal dispositivo es coaxial e interno al manguito. 16.3. Retirada del sistema antiburbujas. Habitualmente va encastrado y su retirada es sencilla. 16.4. Manguito sin dispositivo antiburbujas. De esta forma aumenta el flujo que puede circular entre el tip y el manguito para la misma altura de botella de irrigación. modificar el diámetro de la punta de facoemulsificación son exponenciales (Fig. 17) y, por ello, los diámetros de los mismos no debieran ser tan pequeños como para comprometer el flujo hasta niveles que pudieran hacer poco eficaz el rendimiento de los equipos. Anteriormente comentábamos que las entradas son sólo aseguradas por la vía de irrigación; respecto a las salidas, mencionaremos que éstas se producen por dos mecanismos (Tabla XII): 1) Extracción por la vía de aspiración; 2) Pérdidas incisionales. El control de la aspiración dentro del sistema es realmente más complejo que el control de la irrigación; muchos factores son capaces de influir sobre el volumen y la velocidad de salida de fluidos durante la facoemulsificación. Entre los diferentes factores, algunos de ellos serían: 1) Tamaño de in- Fig. 17. Relación entre flujo y diámetro del tip. El diámetro del tip es el elemento que más condiciona el flujo. 17.1. Diámetro del tip y flujos relativos. Según el diámetro del tip disminuye, el flujo relativo a través del mismo disminuye exponencialmente (ver Tabla IX, ecuación de Poiseuille). 17.2. Relación teórica entre diámetro del tip y flujos. Según el diámetro del tip disminuye linealmente, el flujo se reduce exponencialmente. Figuras adaptadas de Devgan26. 573 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN cisión; 2) Diámetro de la punta de facoemulsificación y del manguito; 3) Tipo de bomba y ajustes; 4) Diámetro del tubo y compresibilidad (compliance) de los mismos. Entre los factores que guardan una estrecha relación con la aspiración, destacaríamos: 1. Flujo El flujo es definido como el volumen de líquido que circula dentro del ojo por unidad de tiempo; suele ser expresado en cc/min (centímetros cúbicos por minuto). El líquido penetra en el ojo a través de la vía de irrigación y lo abandona a través del tip, conectado con la vía de aspiración, y por pérdidas incisionales, que se producen cuando no existe un ajuste perfecto entre la incisión y el manguito del tip. Por ello, más precisamente, el flujo en cc/min únicamente expresa el volumen que abandona el ojo a través del tip y de la vía de aspiración y no contempla las pérdidas incisionales. El flujo controla la forma en la que los materiales son atraídos hacia la punta de facoemulsificación. El flujo es ajustado directamente en facoemulsificadores con bomba peristáltica (dichos ajustes modifican la velocidad de la bomba peristáltica y secundariamente el flujo) e indirectamente (a través de modificaciones en el nivel de vacío; el nivel de vacío condiciona el flujo) en aparatos con bombas venturi. No es superfluo mencionar que la programación (software) propia de cada equipo también desempeña un papel relevante en la regulación del volumen de salida así como en la velocidad de tal salida. En teoría, una bomba de flujo no debería generar vacío en el sistema mientras no se produjera oclusión; sin embargo, algunos autores7,8 han reconocido que tal fenómeno puede ocurrir (generación de vacío en el sistema en relación con el flujo y sin que se haya producido la oclusión) aunque otros11 consideran que sólo los sistemas venturi pueden generar un vacío activo sin oclusión. Mientras el vacío instantáneo puede ser una ventaja para la vitrectomía, la demora en la generación del vacío tras la oclusión pudiera ser una ventaja en cirugía de cataratas, especialmente ante capturas inadvertidas del iris o de la cápsula. Se ha demostrado, como venimos repitiendo, que a mayores flujos incluso las bombas peristálticas generan vacío casi instantáneo incluso sin oclusión en el sistema8. El aumentar el flujo supone mejorar la followabilility del sistema y las corrientes que se generan mejoran el desplazamiento de los fragmentos de cristalino en la cámara anterior hacia la punta del faco, atracción favorecida también por el vacío que se puede generar, sin oclusión, a elevados flujos. Hemos mencionado que las potencias de facoemulsificación de diferentes equipos no son comparables; tampoco lo son los flujos12 ni los niveles de vacío10. En relación con los flujos, el equipo Millenium en forma peristáltica desarrolla un flujo inferior en un 17% al preestablecido; en los demás equipos tal relación presenta diferencias inferiores al 3%12. El sistema Cruise Control® del equipo Sovereign también disminuye el flujo en un 4,1% y sólo incrementa el flujo en 2 ml/min cuando pasamos de 34 a 40 ml/min en el nivel de flujo preestablecido de la consola12. El 574 sistema Cruise Control® restringe el flujo a través de una apertura de 0,3 mm y su objeto es reducir la magnitud del surge postoclusión; éste sistema se incluye en la línea de aspiración. El flujo a bajos niveles de vacío máximo puede ser mucho más bajo que el indicado en la máquina y puede existir un vacío sin oclusión a flujos elevados con máquinas peristálticas; esto es así porque es necesario tener cierto nivel de vacío para mantener flujos por encima de 12 ml/min, dependiendo de la altura de la botella, especialmente cuando se utilizan puntas más delgadas8. Las modificaciones del flujo exigen modificaciones en otros parámetros para conservar un adecuado relleno de la cámara anterior y evitar el colapso. Al aumentar el flujo de aspiración se produce una mayor salida de líquido de la cámara anterior en la misma unidad de tiempo y disminuye la presión intraocular; mencionábamos que: 1) Al aumentar el flujo, para compensar dicho cambio era necesario elevar la altura de la botella de irrigación; 2) Como corolario, al bajar la botella de irrigación será necesario bajar el flujo, pues en caso contrario, aumenta el riesgo de colapso. 2. Vacío El vacío que se genera en la línea de aspiración es la fuerza que determina la salida de fluido desde el interior del ojo durante la cirugía de la catarata. El vacío determina la consistencia en la sujeción del material sobre el tip una vez producida la oclusión completa del mismo. Los niveles de vacío son dinámicos, dependen de factores relativamente fijos (diámetro de la línea de aspiración, nivel preestablecido de vacío en la consola), por un lado, y cambiantes (nivel de oclusión, posición del pedal), por otro, durante las diferentes partes de la cirugía. Los diferentes facoemulsificadores del mercado proporcionan diferentes niveles de vacío, expresado en mm Hg, y el cirujano puede controlarlo a través del pedal pudiendo adaptar sus requerimientos en función del momento quirúrgico y de las características del equipo. Es necesario mencionar que los niveles máximos de vacío preestablecidos en las consolas no son valores reales en la punta de facoemulsificación y que, una vez más, los niveles de vacío definidos en diferentes equipos no son estrictamente comparables10. El equipo Millenium® de Bausch&Lomb, tanto en sus ajustes para sistema peristáltico como venturi, es el que más estrecha relación guarda entre los niveles de vacío preestablecidos y los alcanzados en el tip; no obstante, la forma peristáltica es más lenta que la venturi en alcanzar dichos niveles de vacío: 10,4 vs 7,7 sg a 400 mmHg y 25,3 vs 12,4 sg a 500 mmHg10. En los equipos Legacy Advantec® e Infiniti® de Alcon y Sovereign® de AMO, los niveles alcanzados en el tip son, en general, un 10% inferiores a los preestablecidos en la consola10. Para que se genere vacío en la línea de aspiración es necesario exista oclusión, en mayor o menor grado, en el tip o en la línea de aspiración. Aunque también hemos mencionado que a elevados flujos, con bombas peristálticas, puede ge- 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Fig. 18. Fenómeno surge. Pueden observarse las repercusiones clínicas del fenómeno y la representación de los fenómenos hidrodinámicos implicados. 18.1. Facoemulsificación. Nada hace pensar que pueda producirse un colapso. 18.2. Surge en la práctica clínica. El aplanamiento de la cámara anterior es uno de los fenómenos clínicos del surge durante la cirugía, al acabar la facoemulsificación de un fragmento. 18.3. Representación gráfica de los cambios de presión producidos durante el surge. Hay una pérdida importante de volumen y presión en cámara anterior al romperse la oclusión; en este gráfico se representan nerarse cierto nivel de vacío en la línea de aspiración incluso cuando no exista oclusión7,8. La utilización de sistemas tipo ABS® (Legacy Advantec® e Infiniti® de Alcon), que mejoran la refrigeración del tip y disminuyen el riesgo de surge, disminuye el vacío que se alcanza en la punta del tip en relación con el nivel preestablecido en el equipo y en relación con la utilización de tal tipo de sistemas: 16,5 vs 7,8% para ajustes entre 100 y 500 mmHg para Legacy Advantec® e Infiniti®, respectivamente, siendo la pérdida de vacío sólo del 5,6% para niveles de 600 mmHg con el equipo Infiniti® de Alcon10; en estos casos, una mejor estabilidad de cámara estaría relacionada con la utilización de un menor nivel de vacío que el que está preestablecido en el equipo. 3. Surge Parafraseando a Fishkind6, el surge es, sin duda, un fenómeno indeseable durante la facoemulsificación. El surge, que se produce tras el fin de la oclusión, genera inestabilidad en la Fig. 19. Fenómeno surge y su relación con la compliance/compresibilidad de los tubos dentro de un sistema peristáltico. Se representan las fases del surge y los cambios observados en los tubos, cambios cuya entidad dependerá de la compresibilidad de los tubos. 19.1. Generación de vacío en la línea de aspiración. Con el pedal en posición 2, se genera vacío en la línea de aspiración, vacío que deforma los tubos e induce la pérdida de volumen en su interior. 19.2. Fin del vacío. Al pasar con el pedal a la posición 3, se emulsifica el fragmento retenido en la punta del tip y se pierde el vacío de forma abrupta lo que genera una deformación en sentido inverso de los tubos de aspiración con aumento de su capacidad (volumen) que atrae líquido, también de forma abrupta, de la cámara anterior, pudiendo generar su colapso. cámara anterior y sus manifestaciones clínicas más evidentes son el aplanamiento de la cámara anterior (Fig. 18) y el elevado riesgo de que se produzca una rotura de la cápsula posterior, prolapso vítreo y migración de fragmentos nucleares, así como compromiso iridiano y mayor riesgo de fracaso endotelial. El fenómeno del surge se relaciona estrechamente con el nivel de vacío en la línea de aspiración justo antes de la rotura de la oclusión y con la compliance o elasticidad y el diámetro de los tubos de aspiración9. Aunque existen ciertas características oculares (laxitud zonular y cámaras anteriores estrechas, entre otros) que pueden favorecer tal fenómeno, en general ha sido relacionado más estrechamente con características propias de cada facoemulsificador13. Cuando el tip del facoemulsificador se encuentra totalmente ocluido por un fragmento de cristalino, el flujo de fluido cesa dentro de la línea de aspiración y el vacío inicia su subida hasta alcanzar el nivel previamente establecido bajo nuestra acción sobre el pedal a lo largo de la posición 2; este nivel de vacío ejerce una tracción sobre el fragmento del cristalino pero también presenta un efecto sobre las paredes de la línea de aspiración que tienden a colapsarse en mayor o menor grado (Fig. 19) dependiendo de su resistencia o compliance. Al pasar a posición 3 se produce la facoemulsifica575 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN ción y destrucción de los fragmentos acabando con la oclusión en la punta de facoemulsificación: el flujo se reinicia al nivel preseleccionado y en presencia de un gran nivel de vacío. En este momento, los tubos que se encontraban parcialmente colapsados por el efecto del vacío recuperan su forma original de forma abrupta y esto determina que aumenten su volumen ejerciendo una succión incontrolada de fluido (riada/oleada) desde la cámara anterior que no puede ser compensada por el flujo de irrigación. De este modo, la cámara anterior se colapsa bruscamente, la córnea y la cápsula posterior entran en contacto con la única interposición de la punta de facoemulsificación y los fragmentos de cristalino que aún pueden permanecer dentro del ojo; además, el facoemulsificador se encuentra en modo aspiración (posición 2-3 del pedal) y la captura de la cápsula posterior es la posibilidad más frecuente: el riesgo de rotura de la misma es elevado. La magnitud del surge depende del flujo y vacío preseleccionados y es el factor que más condiciona y limita la selección de altos niveles de flujo y vacío durante la facoemulsificación. También hay que saber que durante la cirugía real las oclusiones se producen de forma transitoria e intermitente y que la magnitud y la frecuencia de los fenómenos de surge depende de muchos factores, algunos de ellos controlables y sobre los que deberíamos incidir: unos dependerán de los equipos, y corresponderá al desarrollo tecnológico controlarlos, y otros de la técnica quirúrgica, que serán controlables según mejor ésta. Es necesario recordar que el surge es un fenómeno que se produce por un retraso en la entrada, desde la línea de irrigación, respecto a la salida de fluido desde la cámara anterior, hacia la línea de aspiración, una vez se produce la rotura de la oclusión. Esa pérdida de balance entre entrada y salida de fluido genera el colapso de la cámara anterior. Como hemos mencionado, existen múltiples factores que condicionan la magnitud del surge (Tabla XIII) y entre ellos destacaríamos: 1. El nivel de vacío en la línea de aspiración antes de concluir la oclusión y de que se establezca el surge: a mayores niveles de vacío, mayor entidad del surge. 2. El flujo de trabajo; a mayor flujo, mayor entidad del surge pues existe un menor tiempo para compensarlo. 3. El diámetro de la línea de aspiración; reduciendo el diámetro de la línea de aspiración aumenta la resistencia al flujo y a menor diámetro, menor capacidad de flujo y menor volumen de fluido que se desaloje de la cámara anterior en la misma unidad de tiempo; en otras palabras, mayor tiempo para la compensación del surge. Tabla XIII. Factores que condicionan la magnitud del surge 1. 2. 3. 4. 576 Nivel de vacío en la línea de aspiración Flujo Diámetro de la línea de aspiración Compliance/compresibilidad de los tubos 4. Compliance/compresibilidad de los tubos de la línea de aspiración; cuanto más rígidos son los tubos, menor posibilidad de deformación y alojarán menor volumen de fluido al instaurarse el surge. Aún no existe consenso sobre como medir el surge; tal hecho dificulta, una vez más, la comparación de equipos. Es evidente que al instaurarse el surge se producen cambios de volumen y presión en la cámara anterior. La gravedad del surge dependerá también de la rapidez con la que se instauran los cambios de presión y volumen; el tiempo de instauración condicionará también la capacidad de respuesta de los sistemas de compensación del surge en la práctica. Medir la caída de presión que se produce en la cámara anterior o el volumen de fluido que se pierde al instaurarse el surge proporcionan sólo una medida parcial del fenómeno pues no tienen en cuenta las complejas relaciones entre estas magnitudes y la mayor o menor rapidez (tiempo, en definitiva) con el que se producen dichos cambios; además, si tales fenómenos se miden en cámaras anteriores artificiales rígidas la salida y entrada de fluidos, al romperse al oclusión, es simultánea y no existe el retraso de la entrada respecto a la salida de fluidos que se produce en el ojo humano durante la facoemulsificación11. Para Zacharias11, tales medidas practicadas en sistemas con cámara anteriores rígidas y alejadas de la naturaleza real de la cámara anterior humana pudieran no ser suficientes para definir el fenómeno del surge y propone modelos con cámaras anteriores colapsables que permitirán otras medidas, unas relacionadas con los cambios de volumen y otras con los cambios de presión. En relación con los cambios de volumen, propone medir11: 1) Fluctuaciones volumétricas (tomando el volumen de cámara anterior previo y posterior al surge como referencia), que reflejaría en ml el máximo cambio de volumen tras el fin de la oclusión; 2) Fluctuación integral de volumen, en ml/sg, que mediría los cambios de volumen por unidad de tiempo; y 3) Tiempo de recuperación del volumen medio o tiempo entre inicio de la rotura de la oclusión y recuperación de la mitad del volumen perdido, que pudiera ser una medida más precisa de la duración del cambio de volumen tras el inicio del surge. Y de la misma manera en relación con los cambios de presión sería útil medir11: 1) Fluctuaciones de presión (tomando la presión de cámara anterior previa y posterior al surge como referencia), que reflejaría en cm H2O la máxima pérdida de presión tras el fin de la oclusión; y 2) Fluctuación integral de presión, en cm H2O/sg, que mediría los cambios de presión por unidad de tiempo. Tales intentos van en la línea de intentar singularizar el fenómeno del surge adaptándolo más a situaciones fisiológicas (cámaras anteriores artificiales colapsables) estudiando los cambios en presión y volumen11 que los métodos experimentales tradicionales (cámaras anteriores artificiales rígidas) que se han centrado en analizar únicamente los cambios de presión14,15. El control del surge es uno de los principales objetivos con el que se encuentran las casas comerciales que fabrican facoemulsificadores y varias han sido y son las estrategias 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Tabla XIV. Estrategias para el control del surge Modificando tubos de la línea de aspiración Modificando el sofware de los equipos 1. Reforzado los tubos de la línea de aspiración 2. Disminuyendo el coeficiente de compresibilidad de los tubos 3. Sistema Cruise Control® 1. 2. 3. 4. utilizadas. La introducción de tubos de baja compliance (mayor resistencia a la deformación), sistemas de bypass en las líneas de aspiración, puntas de facoemulsificación modificadas así como ciertas modificaciones introducidas en el software de los equipos han contribuido a solucionar parcialmente tal fenómeno. Algunas clásicas han sido la introducción de sistemas de venting introduciendo aire o fluido en la línea de aspiración al romperse la oclusión o la reducción de los diámetros de las puntas de facoemulsificación restringiendo así los flujos circulantes a dicho nivel y limitando la posibilidad de surge; esta última estrategia aumentó el riesgo de obstrucciones a nivel del tip. Veamos en detalle algunas de las estrategias de más éxito para el control del surge (Tabla XIV): 1. Una de ellas ha ido en la línea de modificar los tubos de la línea de aspiración según diferentes estrategias que pretenden reducir el diámetro de los tubos con objeto de proporcionar mayor sujeción a menor flujo reduciendo el surge postoclusión a elevados niveles de vacío. Entre estas modificaciones, destacaríamos algunos de los cambios más relevantes: 1.1. Reforzado los tubos de la línea de aspiración aumentando el grosor de sus paredes (sistema MaxVac® de Alcon). 1.2. Disminución de la elasticidad o el coeficiente de compresibilidad (compliance) de los tubos (StableChamber tubing system® de Bausch&Lomb). 1.3. El sistema Cruise Control® de Staar Surgical restringe el flujo a través de un dispositivo que se incorpora en la línea de aspiración y que presenta una malla, que atrapa los fragmentos del cristalino facoemulsificados, seguida de una apertura de 0,3 mm, que incrementa la resistencia al flujo y limita la posibilidad de que se produzca el fenómeno del surge. Su objetivo es reducir la magnitud del surge postoclusión y su efecto beneficioso mayor en aquellos equipos con mayores niveles de surge. Dicho sistema ha sido adaptado a diferentes equipos; en situaciones experimentales logra mejorar discretamente el surge observado con el Sovereign® de AMO pero no el observado con el sistema peristáltico del Millenium® de Bausch&Lomb, equipos que a priori controlan aceptablemente el surge13. Por otro lado, el sistema Cruise Control® logra reducir un 42,9% el efecto surge con el equipo Le- Sistema CASE® Tecnología Fusion Fluidics® Sistema Stellaris EQ Fluidics® Otros gacy® de Alcon y para unos valores de 500 mm Hg de vacío, 40 ml/min de flujo y altura de botella de 75 cm16. También hay que mencionar que el sistema Cruise Control® del equipo Sovereign® de AMO también disminuye el flujo en un 4,1% y sólo incrementa el flujo en 2 ml/min cuando pasamos de 34 a 40 ml/min en el nivel de flujo preestablecido de la consola12, aspecto que mejoraría el surge a unos hipotéticos mayores niveles de vacío que no serían reales. 2. Otra, por modificaciones en el software creando algoritmos que son capaces de ajustar los parámetros de la bomba en escasos milisegundos antes de que se produzca la rotura de la oclusión; en esta línea trabajan diferentes casas comerciales, siendo tal vez el equipo Sovereign® de AMO uno de los primeros equipos en incorporar tales sistemas. Otras alternativas son: 2.1. Sistema CASE® (ChAmber Stabilization Environment) del Whitestar ICE® del equipo Sovereign de AMO que proporciona una estabilidd de cámara anterior efectiva reduciendo el efecto surge postoclusión a diferentes valores de vacío. Según información de AMO, reduciría el surge en un 56% para un nivel de vacío de 500 cc, un flujo de 45 cc/min y con un tip de 20 G. De esta forma, sería posible trabajar con niveles de fluídica más altos lográndose un ajuste del nivel de vacío antes de que se produzca la rotura de la oclusión, momento en el que la fluctuación de cámara se reduciría notablemente y se lograría una mayor estabilidad de la misma. 2.2. La tecnología Fusion Fluidics® del WhiteStar Signature System® de AMO proporciona gran estabilidad de cámara y reduce el surge postoclusión de manera significativa permitiendo trabajar con niveles de flujo peristáltico superiores a 60 cc/min y vacíos de 650 mm; también dicho equipo ha desarrollado un algoritmo antisurge que reconoce la oclusión y ajusta el nivel de vacío máximo de forma descendente antes de que se rompa la oclusión; este efecto se logra haciendo reversible el trabajo de la bomba al escalón inferior del nivel de vacío en escasamente 26 msg. Así, al romperse la oclusión en un nivel de vacío sensiblemente inferior se reduce el surge y se mantiene mejor la estabilidad de la cámara anterior. 577 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN 2.3. El sistema Stellaris EQ Fluidics® de Bausch&Lomb proporciona excepcional estabilidad de cámara y seguridad durante todo el procedimiento balanceando la dinámica de aspiración tanto en modo vacío como en modo flujo. Para el modo vacío, el EQ Vacuum Fluidics Module® utiliza un sistema pionero de vacío con excelente capacidad de respuesta y eficiencia en la aspiración a elevados niveles de vacío. En el modo flujo, el EQ Advanced Flow Module® permite al cirujano escoger intraoperatoriamente entre modos flujo y vacío; por ejemplo, es posible practicar el tallado del cristalino bajo modo flujo y cambiar a modo vacío para extracción de segmentos, aspirado de córtex y pulido capsular. En los últimos años, todas las casas comerciales han desarrollado sus propias estrategias para control del surge. Las novedades son frecuentes y recomendamos la consulta de los manuales de instrucción de los diferentes equipos con objeto de conocer las novedades introducidas para un determinado equipo. Como comentario final de este apartado comentaremos que el control de dinámica de fluidos de los equipos habituales está satisfactoriamente logrado y que, respetando unos márgenes de funcionamiento y seguridad, la posibilidad de complicaciones durante la facoemulsificación ha disminuido de forma notable en los últimos años. ULTRASONIDOS Creemos no equivocarnos al decir que, hasta el presente, la facoemulsificación ultrasónica es el método más eficaz para eliminar cataratas. Existe menor consenso respecto al tipo de energía responsable de su efecto destructivo característico y se acepta que la facoemulsificación representa la interacción de diferentes tipos de energía sobre el cristalino, siendo el efecto de la energía mecánica y la cavitación los elementos claves que contribuyen a la destrucción del cristalino. La potencia de facoemulsificación representa una combinación de frecuencia y recorrido longitudinal del tip; la frecuencia es la velocidad de movimiento de la aguja y se mide en ciclos por segundo (Hz, herzios) y el recorrido longitudinal representa la distancia de desplazamiento de la punta desde su posición inicial hasta la posición más avanzada. La frecuencia suele venir definida por el fabricante no pudiendo ser controlada por el cirujano; en general, varía de 27 kHz a 54 kHz (miles de ciclos por segundo) y la frecuencia más eficiente (máxima eficacia con mínimo consumo de energía) para facoemulsificación ultrasónica se encuentra entre 38 y 48 kHz5. El recorrido longitudinal puede ser seleccionado por el cirujano y suele medirse en porcentajes del total del recorrido posible y puede controlarse desde la consola del equipo o desde le pedal. Las formas básicas de control son: 1) De forma lineal hasta alcanzar el máximo predefinido bajo el avance en el pedal en posición 3 si, previamente, se ha seleccionado modo «cirujano» en el panel de control; ó 2) De forma no lineal: el control sólo se ejerce sobre el uso o no de la potencia de facoemulsifcación y entra en acción toda la potencia preseleccionada de forma instantánea cada vez que nos situamos en posición 3 del pedal si hemos elegido el modo «panel». Mecanismos de acción de los ultrasonidos La facoemulsificación, entendida como una fuerza, actúa en base a los siguientes componentes (Tabla XV): 1) El impacto mecánico directo; 2) Las ondas generadas por partículas y fluido; 3) La cavitación; y 4) La onda acústica. 1. El impacto mecánico directo ¿Qué aplicaciones derivan de la ecuación fundamental de la dinámica? Una de ellas: una punta aguda (menor superficie de contacto) proporcionará más fuerza por unidad de área que una roma. Si se utiliza un tip romo poco angulado (mayor superficie de contacto) se necesitará más potencia de facoemulsificación para lograr el mismo efecto destructor sobre el cristalino. Otro aspecto en relación con el impacto mecánico es la potencia de facoemulsificación que guarda estrecha relación con el recorrido del tip: a mayor recorrido, mayor aceleración, mayor impacto y mayor capacidad destructiva. En las consolas modernas también es posible decidir como deseamos administrar la energía: forma continua, pulsada, ráfagas/burst, hiperpulsos y otras. Cierto es que el pedal y el control directo del cirujano sobre él pueden controlar la forma de administración de energía y modularla según las fases de la cirugía. El efecto mecánico también parece ser mejor en formas pulsadas: en modo continuo se producirá siempre cierta repulsión de fragmentos debido a la resistencia de los mismos que puede no ser vencida siempre por el impacto mecánico. El utilizar en estos casos formas pulsadas permitirá actuar al sistema de vacío que se genera en las puntas en los modos «off» y volver a recapturar los fragmentos repelidos durante los periodos «on»17. Tabla XV. Mecanismos de actuación de la facoemulsificación 1. 2. 3. 4. 578 El impacto mecánico directo Las ondas generadas por partículas y fluido La cavitación La onda acústica 2. Las ondas generadas por partículas y fluido La vía de irrigación proporciona suero que fluye a través del manguito de facoemulsificación; dicho suero penetra a través de pequeños orificios por lo que su velocidad aumenta en ta- 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Fig. 20. Fenómeno de cavitación. Representación artística de la forma en la que se supone sucede la cavitación. les zonas, tal y como lo vemos en dinámica de fluidos (Ley de continuidad: «Las diversas velocidades con que circula un fluido por un tubo de corriente, son inversamente proporcionales a las secciones de éste», dentro de las aplicaciones del teorema de Bernouilli). El fluido a alta velocidad junto con las partículas destruidas del cristalino generan ondas de choque que contribuyen a la destrucción de más material en la punta del tip. 3. La cavitación La cavitación es una fuente de energía que aumenta el poder de corte ultrasónico18,19. La cavitación (Fig. 20) es el efecto que se genera sobre la punta de facoemulsificación debido al área de baja presión que se genera alrededor de dicha punta cuando inicia su retroceso a partir de su elongación máxima. Al implosionar las burbujas de cavitación, cuyo origen es la baja presión generada, se liberan grandes cantidades de energía que, se cree, presentan una alta capacidad destructiva sobre el cristalino. La cavitación suele quedar limitada a la zona anterior al anillo de metal del tip, no observándose tal efecto ni por fuera ni en la zona que coincide con el lúmen del tip (Fig. 21). Tal fenómeno ocurre de esta forma debido a que la punta de facoemulsificación debe encontrar cierta resistencia al avance para que se produzca la cavitación. También es necesario saber que con puntas anguladas el fenómeno de cavitación, con su poder de destrucción, puede ir orientado hacia el endotelio (Fig. 21), de ahí la importancia de verticalizar el mango de facoemulsificación para lograr la máxima protección endotelial. La inclinación de los tips de Kelman (Fig. 22), con gran capacidad de cavitación, aleja tal efecto del endotelio corneal. De lo mencionado anteriormente se deduce que la cavitación podrá mejorarse en función de la forma de los tips. Una de las estrategias utilizadas ha consistido en incorporar superficies anguladas, casi o prácticamente perpendiculares, al eje longitudinal del tip, como en el tip de Seibel®, o reduciendo el diámetro interno de los mismos, bien de forma perpendicular Fig. 21. Puntas de facoemulsificación y cavitación. La cavitación guarda relación con la morfología del tip. 21.1. Puntas y lugar donde se produce la cavitación. La cavitación queda limitada a la zona anterior al anillo de metal del tip. 21.2. Angulación del tip y orientación de la cavitación. En tips sin angulación (0º) la cavitación se produce en su misma dirección; en angulados, la cavitación seguirá la angulación del tip. al eje longitudinal o de forma más atenuada, como sucede en los tips Flare® de Alcon, MicroFlow® de Bausch&Lomb, MicroSeal® de Alcon y Bausch&Lomb y Cobra® (Fig. 22). Se acepta existen dos tipos de cavitación7 (Tabla XVI): 1) Cavitación transitoria; y 2) Cavitación estable. La primera, cavitación transitoria, ocurriría al iniciar el ultrasonido pero rápidamente se transformaría en cavitación estable (tanto para modos continuo, pulsado o ráfagas/burst), fase en la que las burbujas vibran pero no se produce el fenómeno de implosión por lo que decrece la eficacia emulsificadora por pérdida de capacidad de cavitación. En el modo «hiperpulsos» es el modo con el que se lograría el mayor efecto de cavitación transitoria y por ello la mayor eficacia emulsificadora basada en la cavitación. Tal hecho ha sido demostrado experimentalmente20, especialmente para el modo ultrapulsado (pulsos de 4-6 milisegundos). Fig. 22. Puntas de facoemulsificación de Kelman. Con gran poder de cavitación, su inclinación aleja tal efecto del endotelio. 579 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Tabla XVI. Cavitación según modo de facoemulsificación Cavitación Modo facoemulsificación Transitoria Estable Eficacia cavitación Continuo Pulsado Ráfagas/burst Hiperpulsos + ++ ++ +++ +++ ++ ++/+++ + Mínima Moderada Moderada Máxima 4. La onda acústica La onda acústica es generada por las vibraciones de la aguja de facoemulsificación. Esta onda viaja a la velocidad del sonido y proporciona el ruido que se percibe durante la facoemulsificación. No obstante, la mencionada onda acústica tiene poco efecto sobre la destrucción del cristalino. Modulación de la energía de facoemulsificación Actualmente es posible controlar la forma en la que la energía ultrasónica de facoemulsificación va a ser administrada. El objetivo es conseguir la máxima eficacia con el mínimo consumo de energía de facoemulsificación para lograr el menor efecto térmico posible, el mínimo daño sobre las estructuras adyacentes al cristalino (endotelio, incisión corneal e iris, entre otros) y la más rápida rehabilitación visual posible5. El no modular ni controlar la forma de liberación de la energía puede tener efecto en la producción de energía térmica (calor)21-24, aumentando el riesgo de quemaduras incisionales, y en la formación de radicales libres25, que pudieran tener implicaciones biológicas aún hoy poco conocidas. La adecuada modulación de energía junto con el uso de la técnica quirúrgica más adecuada y depurada lograrán la máxima eficacia de la energía utilizada o el mínimo uso de energía necesario para lograr un fin: la destrucción del cristalino para que pueda ser aspirado. Recordaremos que podemos preseleccionar, en el panel de control, la máxima potencia de facoemulsificación que deseemos utilizar en determinado caso; la misma se alcanzará según avancemos en el recorrido en posición 3 del pedal de facoemulsificación. La primera posibilidad de controlar cómo se libera esa máxima potencia de facoemulsificación seleccionada vino dada, en los primeros equipos, con la selección, en la propia consola, de una de las dos formas de utilizar la energía. Las dos formas básicas de utilización de la potencia de facoemulsificación son: 1. Modo control panel (en cualquier zona del recorrido de la posición 3 entrará toda la potencia seleccionada) que, actualmente, prácticamente no se utiliza. 2. Modo control lineal (se consigue mayor potencia según avancemos en el recorrido a lo largo de la posición 3 del pedal) que permite un mejor control de la 580 Tabla XVII. Formas de liberación de energía en facoemulsificación 1. 2. 3. 4. Modo continuo Modo pulsado Modo ráfaga Modo hiperpulsos potencia de emulsificación por parte del cirujano. Recordaremos que a mayor potencia, mayor recorrido longitudinal del tip del facoemulsificador. También es posible seleccionar, a otro nivel, la forma en la que deseamos sea liberada la energía durante la facoemulsificación (Tabla XVII). Dicha energía puede ser liberada de las siguientes formas5,7,26: 1. Modo continuo 2. Modo pulsado 3. Modo ráfaga 4. Modo hiperpulsos Veamos las características esenciales de tales modos de facoemulsificación: 1. Modo continuo En modo continuo se produce una oscilación permanente de la punta de facoemulsificación de la amplitud prefijada en el panel de control (Fig. 23); por ejemplo: 1) Si se prefija una potencia del 100%, el recorrido de la punta en cada oscilación completará el máximo recorrido que permita tal equipo; 2) Si se prefija una potencia del 50%, sólo recorrerá la mitad del recorrido que permita el equipo. Como hemos mencionado: 1) Lo anterior es cierto siempre que tengamos seleccionado en el aparato modo «control panel» y estemos en cualquier zona de la posición 3 del pedal; 2) Sólo será cierto en la zona de máximo recorrido de la posición 3 del pedal si tenemos seleccionado modo «control lineal» (en las zonas anteriores del recorrido de la posición 3 del pedal, la potencia de facoemulsificación irá aumentado según avancemos en dicha posición 3). Esta técnica de facoemulsificación es útil durante las fases de tallado del cristalino (técnicas tipo nucleofractis, «divide y vencerás» y similares), tallado que depende primariamente de la potencia de facoemulsificación; por el contrario, usando técnicas de oclusión (chop y similares), al aumentar la potencia aumenta también la repulsión sobre los fragmentos y será necesaria una mayor compensación con la fluídica (mayor vacío y/o ajuste de los parámetros de flujo para mejorar la followability o atracción de fragmentos). 2. Modo pulsado En este modo, la oscilación de la punta se da en forma de pulsos con periodos de actividad («on») y de reposo («off») (Fig. 24); las fases «on» coinciden con los periodos de uso de 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS Fig. 24. Modo pulsado. La liberación de energía se produce en pulsos. 24.1. Modo control panel y potencia 50%. La potencia máxima prefijada (50% en este caso) se alcanza al iniciar posición 3 pero la energía se libera a modo de pulsos (4 PPS, en este caso). 24.2. Modo control lineal y potencia 50%. La potencia máxima (también 50% en este caso), liberada también en forma de pulsos (4 PPS) se alcanza según avanzamos en el recorrido en posición 3. Fig. 23. Modo continuo. La energía de facoemulsificación es liberada de forma continua según se pisa el pedal en posición 3. 23.1. Modo control panel y potencia 100%. Cada vez que iniciamos posición 3 del pedal, entra toda la potencia de facoemulsificación. 23.2. Modo control panel y potencia 50%. Al iniciar posición 3 entra la potencia precalibrada en el panel (50% en este caso). 23.3. Modo control lineal y potencia 100%. La potencia prefijada (100%) se alcanza de forma progresiva según avanzamos con el pedal a lo largo de la posición 3. 23.4. Modo control lineal y potencia 50%. La potencia máxima prefijada en el panel (50% en este caso) se alcanza también de forma progresiva según avanzamos en posición 3. energía y las fases «off» son fases donde no se libera energía; de tal alternancia de fases se reduce tanto el uso de energía como la generación de calor. Los pulsos podrán ser liberados en modo control panel (en posición 3 se libera el máximo de la energía preprogramada) y en modo control lineal (a lo largo de la posición 3 se va liberando la energía hasta alcanzar el máximo prefijado). El cirujano preestablece los pulsos por segundo (PPS de «pulses per second») que suelen oscilar, habitualmente, entre 1 y 20; característicamente, el tiempo útil («duty cycle») suele ser del 50% del tiempo del ciclo facoemulsificación-reposo. A cada pulso de facoemulsificación sigue una fase de reposo. Según aumentemos el número de pulsos por segundo, aumentaremos también el número de fases de reposo en el mismo segundo: evidentemente, a mayor número de pulsos por segundo, menor duración de cada pulso y de cada fase de reposo; no obstante, idéntico tiempo total de facoemulsificación y de reposo. Veamos un ejemplo (Fig. 25): 1) A 4 pulsos por segundo corresponden 4 fases de faco y 4 fases de reposo por sg (8 fases en total de 1/8 de sg cada una de ellas: 125 msg); 2) A 8 pulsos por segundo corresponden 8 fases de faco y 8 fases de reposo por sg (16 fases en total de 1/16 de sg cada una de ellas: 62,5 msg); 3) En ambas situaciones, se ha utilizado faco durante 500 msg y se ha hecho reposo de 500 msg; 4) Sin embargo, utilizándose la misma energía se ha Fig. 25. Pulsos por segundo (PPS) en facoemulsificación modo pulsado. En este ejemplo, se representan pulsos en modo control panel, modo pulsado, potencia 50% y pulsos generados en un sg. Obsérvese que al doblar el número de pulsos, la utilización de energía en un sg es la misma pero, dado que cada pulso tiene menor duración, la generación de calor se reduce. 25.1. Modo pulsado y 4 PPS. Cada pulso (4/sg) y cada fase de reposo (4/sg) tienen una duración de 125 msg. 25.2. Modo pulsado y 8 PPS. Cada pulso (8/sg) y cada fase de reposo (8/sg) tienen una duración de 62,5 msg. generado menos calor utilizando más PPS (8 frente a 4), pues al ser los pulsos más cortos ha habido menor posibilidad de generar calor pues se ha producido una mayor alternancia entre generación de calor y tiempo de enfriamiento. La utilización de modo pulsado reduce la utilización de energía de facoemulsificación en un 50%, favorece el mantenimiento de una cámara anterior más estable, permite una más firme sujeción de los fragmentos en el tip y disminuye el chattering5. 3. Modo ráfaga/«burst» En este modo, se utiliza un porcentaje fijo de potencia (control «panel»), una duración de liberación de energías programable y un intervalo entre liberaciones de energía que podemos controlar linealmente a través del pedal (Fig. 26). En esta situación, cada liberación de energía tiene la misma potencia de facoemulsificación pero el intervalo entre cada digamos «dispa581 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN 4. Hiperpulsos/«HyperPulse» Fig. 26. Modo ráfaga/«burst». Según avanzamos en posición 3 del pedal, el tiempo entre pulsos disminuye llegando a ser similar a faco en modo continuo al final de la posición 3; en esta modalidad de facoemulsificación no se posible el control lineal de la potencia de ultrasonidos. ro» de energía se acorta según avanzamos en posición 3 del pedal. Con el pedal apretado al máximo en posición 3, la facoemulsificación en modo ráfaga («burst») se comporta como si fuera modo continuo, sin tiempos de reposo y sin posibilidad, por ello, de refrigeración; en definitiva, con el pedal controlamos el intervalo o número de pulsos dentro de una ráfaga por segundo mientras la potencia de cada pulso permanece fija. El cirujano suele también poder elegir la duración de cada pulso. A diferencia de lo que ocurre en modo pulsado donde cada ciclo se compone de un periodo «on» del 50% y un periodo «off» del 50%, en el modo burst es posible: 1) Acortar los tiempos de modo «on» (en general, por programación en la consola), con mayor tiempo para la refrigeración; ó 2) Acortar los tiempos de modo «off» (según avanzamos con el pedal en posición 3), llegando a funcionar como en modo continuo, con lo que la posibilidad de refrigeración disminuye. Esta es la modalidad de liberación de energía que, algunos autores, recomiendan en el momento de empalar al iniciar técnicas de chop. En la actualidad, los nuevos equipos permiten también preestablecer que en la posición más avanzada del pedal los pulsos no sean de más del 50% «on»; así se consigue que no se comporten como modo continuo, situación en la que la posibilidad de refrigeración no sería posible. El modo burst tiene el inconveniente de no poder ser utilizado en modo control lineal. Como tales se entienden las programaciones avanzadas que permiten controlar los modos pulsado y burst. El modo hiperpulsos puede considerarse como una variación de modo pulsado que mantiene el control lineal de la potencia de ultrasonido pero que permite elegir periodos más cortos de pulsos con mayores periodos «off». HyperPulse es un término acuñado por Chang y es conocido como HyperPulse en el equipo Infiniti de Alcon y como WhiteStar® en el equipo Sovereign de AMO7. Diversas pueden ser sus ventajas, pero entre ellas destacan que el uso de hiperpulsos mejora la followability y la protección térmica de la incisión. Así, es posible seleccionar desde 4-16 pulsos por segundo, funcionando de forma similar a como lo haríamos con un modo pulsado convencional, hasta 120 pulsos por segundo, situación más parecida a la facoemulsificación en modo continuo. También permite que cada pulso en modo burst tenga una duración tan corta como de 4 msg (modo ultrapulsado), cuando en modo convencional pudiera ser de 80 msg. Además, cada forma de liberación de energía puede ser ajustada con diferentes tipos de ciclo y rise time. Es una buena opción para facoemulsificación bimanual donde, al trabajar con tip sin manguito, existe menor posibilidad de refrigeración del tip, siendo por ello de sumo interés intentar generar la mínima liberación de energía y calor. Existen otras formas de liberación de energía que han sido más o menos específicas de determinados equipos. Entre ellas, destacaríamos la tecnología ICE del equipo Sovereign de AMO que permite, en modo pulsado, liberar un kick inicial (que pudiera ser traducido como un megaimpulso) al principio de cada pulso ICE (Fig. 28.1); la amplitud del kick puede ser ajustada desde el 0 al 12% del total de la potencia del pulso y puede seleccionarse como constante, creciente o decreciente (Fig. 28.2, 28.3 y 28.4) en cada ajuste del faco. Tal estrategia de liberación de energía permitiría acelerar el poder de cavitación incluso a niveles de potencia tan bajos como el 10%, según información proporcionada por la casa comercial. Diferencias entre los modos de liberación de energía Fig. 27. Modo hiperpulsos. En el dibujo se representa una preselección de 2 PPS, 25% de período útil (duty cycle) y control lineal de potencia de ultrasonido; según se presiona el pedal, aumenta la potencia de los pulsos. En este caso, se libera energía en el 25% de duración de cada ciclo (recuérdese que en modo pulsado la energía se liberaba durante el 50% del ciclo). Proporciona menor riesgo de elevación térmica en la incisión. 582 Los diferentes modos de uso de la energía en facoemulsificación tienen sus ventajas, inconvenientes y usos (Tabla XVIII). El modo continuo supone un mayor uso de energía y un mayor riesgo de quemadura incisional, así como una mayor tendencia a provocar repulsión de fragmentos o chattering. Puede ser útil durante el tallado de los surcos para técnicas de cracking o para el surco inicial en técnicas como el stop&chop; la eficacia del tallado depende de la potencia de facoemulsificación. Los modos pulsado y burst tienen la ventaja sobre el modo continuo de permitir periodos «off», disminuyendo el tiempo de uso de energía de facoemulsificación y disminuyendo el riesgo de quemadura incisional y mejorando la followability, siendo especialmente útiles en técnicas de faco-chop. El modo pulsado 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS 1. El cirujano avanza con el facoemulsificador en la cara anterior del cristalino y si éste no ofrece excesiva resistencia es destruido durante la fase «on». 2. En la fase «off» el cirujano está avanzando igualmente sobre el cristalino pero no hay actividad del facoemulsificador: no hay destrucción de cristalino sino que toda la fuerza translacional del tip arrastra el cristalino y ejerce una tracción sobre la zónula. 3. En la nueva fase «off» vuelve a existir destrucción del cristalino, repitiéndose la secuencia. Los hiperpulsos proporcionan la máxima protección térmica; por ello, sería la forma ideal de utilización de la energía para facoemulsificación bimanual en la que prescindimos del uso de manguito de irrigación alrededor del tip. Como ventaja añadida, tal modo mejora la followability. Los diferentes usos de los modos de liberación de energía serán discutidos en los capítulos referentes a las diferentes técnicas quirúrgicas. Fig. 28. Posibilidades de ajuste del kick con la tecnología WhiteStar® ICE del equipo Sovereign de AMO. El kick al inicio de cada pulso permite acelerar la cavitación. 28.1. Representación gráfica del kick. Se programa un kick de la potencia deseada en el primer msg de cada pulso. 28.2. Kick de amplitud constante. La amplitud del kick se mantiene constante a lo largo de todos los pulsos. 28.3. Kick de amplitud creciente. En cada nuevo pulso, la amplitud del kick aumenta según la programación. 28.4. Kick de amplitud decreciente. En este caso, en cada nuevo pulso la amplitud del kick disminuye. tiene la ventaja sobre el modo burst de permitir el control lineal de la potencia de facoemulsificación. Los modos pulsado y burst pudieran estar contraindicados para el tallado de surcos debido a su capacidad potencial de dañar la zónula; veámos los fenómenos que pueden ocurrir tallando un surco para una técnica de cracking: Medida de la energía de facoemulsificación utilizada El lograr medir la energía de facoemulsificación utilizada permitiría unificar criterios y comparar equipos y técnicas en cuanto a eficacia en cirugía del cristalino. Hoy en día estamos aún lejos de lograr una estandarización de lenguajes y de unidades de energía utilizadas y resulta difícil el comparar equipos. Las máquinas miden, en general, la potencia media utilizada y el tiempo de facoemulsificación, entendido este último como el tiempo en el que mantenemos el pedal en posición 3. Cada equipo proporciona una diferente potencia cuando ésta es predefinida al 100%; dicha potencia depende de diferentes factores, entre ellos: voltaje de excitación, relación de amplificación ultrasónica, eficiencia de transformación del sistema piezoeléctrico o magnetoestrictivo y pérdidas por fricción, entre otros. Tabla XVIII. Ventajas, inconvenientes y usos de modos de facoemulsificación Modo US Ventajas Continuo Pulsado Control lineal de potencia Protección térmica Mejor followability Disminuye APT Ráfagas/burst Protección térmica Mejor followability Disminuye APT Hiperpulsos Máxima protección térmica Mejor followability Disminuye APT Mayor cavitación transitoria Inconvenientes Usos Sin protección térmica Mayor uso de energía Mayor chattering Util en fases de tallado Técnicas de chop Potencia de faco fija, sin control lineal Util al empalar en técnicas de chop Util en técnicas microincisionales bimanuales 583 IV. CIRUGÍA DE LA CATARATA: FACOEMULSIFICACIÓN Tabla XIX. Energía disipada acumulada Facoemulsificación CDE = t x P Siendo: CDE = energía disipada acumulada t = tiempo de facoemulsificación (tiempo en posición 3 del pedal) P = media de potencia de facoemulsificación utilizada Facoemulsificación + torsional CDE = (t x P) + (tT x 0,4 x AT) Siendo: CDE = energía disipada acumulada t = tiempo de facoemulsificación (tiempo en posición 3 del pedal) P = media de potencia de facoemulsificación utilizada 0,4 = factor que representa la reducción del calor disipado AT = media de la amplitud torsional utilizada 1. Cumulative dissipated energy/Energía disipada acumulada Como hemos mencionado, mide la energía de facoemulsificación utilizada durante un procedimiento quirúrgico, más concretamente la energía utilizada con el pedal en posición 3. Suele venir representado por el acrónimo CDE (Cumulative Dissipated Energy). Se calcula multiplicando el tiempo de facoemulsificación por la media de potencia de facoemulsificación utilizada (Tabla XIX). En el caso de utilizar energía torsional (OZilTM), se calcularía sumando al valor anterior el resultado de multiplicar el tiempo de energía torsional por 0,4 (factor recomendado y que representa la reducción del calor disipado en relación con facoemulsificación convencional) y por la media de la amplitud torsional utilizada. 1. 20 sg al 100% de potencia: 20 sg de APT. 2. 40 sg al 50% de potencia: 20 sg de APT. 3. 100 sg al 20% de potencia: 20 sg de APT. Existen otras medidas posibles, algunas de ellas específicas de algunos equipos concretos y otras han sido descritas en el apartado referido a terminología en este mismo capítulo. REFLUX/REFLUJO En ocasiones es necesario recurrir al reflujo; no es una situación deseable en cuanto permite la reentrada de líquidos y materiales, en el ojo, que ya lo habían abandonado; al menos teóricamente, aumenta el riesgo de contaminación. Es necesario hacer reflujo cuando se ha producido un atrapamiento en la vía de aspiración de un material no deseado (iris, cápsula posterior o cualquier otra estructura que pueda ser dañada). El reflujo en un facoemulsificador es el mecanismo que permite invertir la dirección de la corriente y liberar en sentido inverso, hacia cámara anterior, bien los materiales atrapados en la punta del tip (iris, cápsula posterior) o los fluidos y materiales que ya se encontraba en la línea de aspiración y fuera ya de la cámara anterior. Casi todos los facoemulsificadores tienen una posición de de reflujo y un pulsador específico para tal fin en el pedal, en alguno de sus laterales; además, algunos equipos permiten ajustes, modificar la tecla de pulsación de actividad y otra serie de ajustes. Los diferentes equipos han utilizado diferentes estrategias para el reflujo; mencionaremos las más habituales para lograrlo: 1) Invirtiendo la dirección de la bomba de aspiración; 2) Bloqueando la línea de aspiración; y 3) Abriendo una segunda vía de infusión conectada a ella. SONIDOS 2. Tiempo de facoemulsificación absoluto El tiempo absoluto de facoemulsificación (APT de «absolute phaco time») sería el tiempo de utilización de la potencia de facoemulsificación al 100%. El tiempo de facoemulsificación absoluto se calcula multiplicando el tiempo total de facoemulsificación (tiempo en posición 3 del pedal) por la potencia media de facoemulsificación utilizada (Tabla XX). Evidentemente, son escasos los momentos en los que utilizamos tal potencia del 100% de facoemulsificación; así, los APT para diferentes situaciones serían los siguientes: Tabla XX. Tiempo absoluto de facoemulsificación (APT) APT = t x P Siendo: APT = tiempo absoluto de facoemulsificación t = tiempo total de facoemulsificación P = potencia de facoemulsificación utilizada (en porcentaje) 584 Poco se habla de los sonidos generados por las máquinas de facoemulsificación y, sin embargo, están presentes en todos los equipos y nos resultan familiares durante nuestras cirugías. Además, nos proporcionan información que, a veces, nos obliga a modificar algunas maniobras quirúrgicas. Algunos sonidos pueden ser secundarios a ciertas operaciones mecánicas necesarias para determinada función; la liberación del gas resulta audible en las bombas venturi de forma más intensa según aumenta el nivel de vacío; la rotación de una bomba peristáltica también proporciona información audible que se modifica según aumenta su velocidad. Otros, se relacionan con aspectos claves de la cirugía; el inicio de la irrigación, la aspiración, tanto libre como en oclusión, y la facoemulsificación propiamente dicha tienen sus sonidos característicos. El inicio de la irrigación se identifica por la liberación del sistema que la bloquea. La aspiración se reconoce por el sonido de circulación del gas en las bombas venturi y por el giro de los rodillos en una peristáltica. 49. FUNDAMENTOS DE LA FACOEMULSIFICACIÓN Y DINÁMICA DE FLUIDOS La oclusión es identificada con un sonido característico y alerta del cese de flujo intraluminal dentro del tip o de una obstrucción dentro del sistema cuando no observamos masas en su punta: la información sonora y la visualización del estado de la zona de aspiración se complementan. La facoemulsificación es identificada tanto por el sonido, característico de cada modo, como por la vibración en el mango que también proporciona información táctil; en este caso, el sonido y el tacto proporcionan información de relevancia quirúrgica. Los modos continuo, pulsado o burst son fácilmente identificables y nos ayudarán a observar la relación entre el modo utilizado y la eficacia conseguida y a modificar algunos parámetros cuando no consigamos la eficacia esperada. Es necesario recordar que el sonido no es «ultrasónico» sino un tono generado por el mango y la punta de facoemulsificación. Los sonidos suelen ser propios de cada equipo y rápidamente nos resultan familiares y los integramos en nuestra rutina quirúrgica. CONCLUSIONES A lo largo de este capítulo hemos intentado acercar al lector aquellos fundamentos que, a nuestro entender, son básicos para llegar a entender la técnica de facoemulsificación. El conocimiento de ciertos principios de física y, en concreto, de dinámica de sólidos y fluidos debe posibilitar una mejor comprensión de todos los fenómenos que ocurren durante una cirugía de catarata. Tras el conocimiento de los fundamentos será más sencilla la lectura de los capítulos de técnica quirúrgica propiamente dicha. Hay lecturas que son altamente recomendables para aquellos que quieran conocer más profundamente los entresijos de todos los pasos de la cirugía. Aconsejamos la lectura de los textos recomendados, fuente, en definitiva, de muchos de los contenidos aquí recogidos, siendo además un tema sobre el que no existe profusión bibliográfica. BIBLIOGRAFIA 1. Kelman CD. Phacoemulsification and aspiration: a new technique of cataract removal. A preliminary report. Am J Ophthalmol 1967; 64: 23-35. 2. Grabow HB. Early results of 500 cases of no-stitch cataract surgery. J Cataract Refract Surg 1991:17: 726-730. 3. Samuelson SW, Koch DD, Kuglen CC. Determination of maximal incision length for true small-incision surgery. Ophthalmic Surg 1991; 22: 204-207. 4. Fine IH. Corneal tunnel incision with a temporal approach. In: Fine IH, Fichman RA, Grabow HB, eds. Clear-corneal cataract surgery & topical anestesia. Thorofare: Slack; 1993: 5-26. 5. Fine IH, Packer M, Hoffman RS. Power modulations in new phacoemulsification technology: improved outcomes. J Cataract Refract Surg 2004; 30: 1014-1019. 6. Fishkind WJ, Neuhann TF, Steinert RF. The phaco machine: the physical principles guiding its operation. In: Steinert RF, ed. Cataract surgery: technique, complications & management, 2nd ed. Philadelphia: Saunders; 2004: 61-77. 7. Seibel BS. Phacodynamics: mastering the tools and techniques of phacoemulsification surgery, 4th ed. Thorofare: Slack Inc; 2005. 8. Adams W, Brinton J, Floyd M, Olson RJ. Phacodynamics: an aspiration flow vs vacuum comparison. Am J Ophthalmol 2006; 142: 320322. 9. Zanini M, Savini G, Buratto L. Physical principles of phacoemulsification. In: Buratto L, Werner L, Zanini M, Apple DJ, eds. Phacoemulsification: principles and techniques, 2nd ed. Thorofare: Slack; 2003: 41-64. 10. Payne M, Waite AN, Olson RJ. Phacoemulsification tip vacuum pressure: comparison of 4 devices. J Cataract Refract Surg 2006; 32: 1374-1377. 11. Zacharias J, Zacharias S. Volume-based characterization of post occlusion surge. J Cataract Refract Surg 2005; 31: 1976-1982. 12. Floyd MS, Valentine JR, Olson RJ. Fluidics and heat generation of Alcon Infiniti and Legacy, Bausch&Lomb Millenium and Advanced Medical Optics Sovereign phacoemulsification systems. Am J Ophthalmol 2006; 142: 387-392. 13. Georgescu D, Payne M, Olson RJ. Objective measurement of postocclusion surge during phacoemulsification in human eye-bank eyes. Am J Ophthalmol 2007; 143: 437-440. 14. Wilbrandt HR, Wilbrandt TH. Evaluation of intraocular pressure fluctuations with differing phacoemulsification approaches. J Cataract Refract Surg 1993; 19: 223-231. 15. Kageyama T, Yagushi S. In vitro evaluation of pressure fluctuatuions with differing height of th infusion bottle in phacoemulsification. Jpn J Ophthalmol 2000; 44: 690-691. 16. Wade M, Icom R, Georgescu D, Olson RJ. Efficacy of Cruise Control in controlling postocclusion surge with Legacy and Millenium venturi phacoemulsification machines. J Cataract Refract Surg 2007; 33: 1071-1075. 17. Miyoshi T. Ultra high-speed images of the phaco tip under different power modes. ASCRS Symposium on Cataract IOL and Refractive Surgery. Washington; 2005. 18. Krefting D, Mettin R, Lauterborn W. High-speed observation of acoustic cavitation erosion in multibubble systems. Ultrasonics Sonochemistry 2004; 11: 119-123. 19. Tognetto D, Sanguinetti G, Sirotti P et al. Visualization of fluid turbulence and acoustic cavitation during phacoemulsification. J Cataract Refract Surg 2005; 31: 406-411. 20. Schaeffer ME. Demonstration of cavitation effects in phacoemulsification devices. ASCRS Symposium on Cataract IOL and Refractive Surgery, San Diego, California, USA, May 2004. 21. Tsuneoka H, Shiba T, Takahashi Y. Feasibility of ultrasound cataract surgery with a 1.4 mm incision. J Cataract Refract Surg 2001; 27: 934-940. 22. Tsuneoka H, Shiba T, Takahashi Y. Ultrasound phacoemulsification using a 1.4 mm incision: clinical results. J Cataract Refract Surg 2002; 28: 81-86. 23. Mendicute J, Gallego Y. Etiopatogenia de la quemadura corneal. In: Soler F, Lorente R, Asís O, eds. Cirugía microincisional de la catarata. Madrid: Mac Line SL; 2004: 49-57. 24. Tsuneoka H. La quemadura corneal: la evidencia experimental. In: Soler F, Lorente R, Asís O, eds. Cirugía microincisional de la catarata. Madrid: Mac Line SL; 2004: 57-64. 25. Riesz P, Kondo T. Free radical formation induced by ultrasound and its biological implications. Free Rad Biol Med 1992; 13: 247-270. 26. Devgan U. Phaco fluidics and phaco ultrasound power modulations. Ophthalmol Clin N Am 2006; 19: 457-468. TEXTOS RECOMENDADOS I. II. III. Seibel BS. Phacodynamics: mastering the tools and techniques of phacoemulsification surgery, 4th ed. Thorofare: Slack Inc; 2005. Zanini M, Savini G, Buratto L. Physical principles of phacoemulsification. In: Buratto L, Werner L, Zanini M, Apple DJ, eds. Phacoemulsification: principles and techniques, 2nd ed. Thorofare: Slack; 2003. Cadarso L. Dinámica de fluidos. In: Mendicute J, Cadarso L, Lorente R, Orbegozo J, Soler JR, eds. Facoemulsificación. CF Comunicación: Madrid; 1999: 31-36. 585