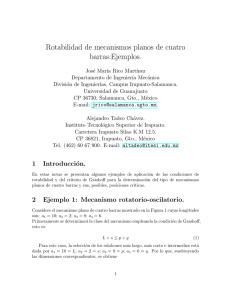
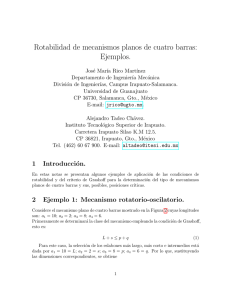
Rotabilidad de mecanismos planos de cuatro barras: Ejemplos. José Marı́a Rico Martı́nez Departamento de Ingenierı́a Mecánica. División de Ingenierı́as, Campus Irapuato-Salamanca. Universidad de Guanajuato. CP 36730, Salamanca, Gto., México E-mail: [email protected] Alejandro Tadeo Chávez. Instituto Tecnológico Superior de Irapuato. Carretera Irapuato Silao K.M 12.5. CP 36821, Irapuato, Gto., México Tel. (462) 60 67 900. E-mail: [email protected] 1 Introducción. En estas notas se presentan algunos ejemplos de aplicación de las condiciones de rotabilidad y del criterio de Grashoff para la determinación del tipo de mecanismos planos de cuatro barras y sus, posibles, posiciones crı́ticas. 2 Ejemplo 1: Mecanismo rotatorio-oscilatorio. Considere el mecanismo plano de cuatro barras mostrado en la figura 1 cuyas longitudes son: a1 = 10, a2 = 2, a3 = 8, a4 = 6. Primeramente se determinará la clase del mecanismo empleando la condición de Grashoff, esto es: L+s≤p+q (1) Para este caso, la selección de los eslabones más largo, más corto e intermedios está dada por a1 = 10 = L, a2 = 2 = s, a3 = 8 = p, a4 = 6 = q. Por lo que, sustituyendo las dimensiones correspondientes, se obtiene 10 + 2 ≤ 8 + 6 o 12 ≤ 14 (2) Por lo tanto, el mecanismo es de la Clase I, más aún, puesto que s = a2 , se concluye que el mecanismo es rotatorio-oscilatorio y el eslabón 2 puede realizar rotaciones completas. En una segunda etapa, se confirmará este resultado empleando las condiciones de rotabilidad y, adicionalmente, se determinarán las, posibles, posiciones crı́ticas de los eslabones de entrada y de salida. 1 Figure 1: Mecanismo plano de cuatro barras 1. Eslabón 2. • Primera condición de rotabilidad. Posición de puntos muertos exterior a1 + a2 ≤ a3 + a4 (3) Sustituyendo las dimensiones correspondientes, se obtiene 10 + 2 ≤ 8 + 6 12 ≤ 14. o (4) El eslabón 2 satisface esta primera condición de rotabilidad. • Segunda condición de rotabilidad. Posición de puntos muertos interior |a2 − a1 | ≥ |a4 − a3 | (5) Sustituyendo las dimensiones correspondientes se obtiene |2 − 10| ≥ |6 − 8| 8 ≥ 2. o (6) El eslabón 2 satisface esta segunda condición de rotabilidad. Por lo tanto, se verifica que este eslabón 2 puede girar 360◦ . 2. Eslabón 4. • Primera condición de rotabilidad. Posición lı́mite exterior a1 + a4 ≤ a2 + a3 (7) Sustituyendo las dimensiones correspondientes se obtiene 10 + 6 ≤ 2 + 8 o 16 6≤ 10 (8) El eslabón 4 no cumple con esta condición de rotabilidad, por lo tanto tiene una posición lı́mite, vea la figura 2. El ángulo correspondiente se obtiene como cos α = a21 + a24 − (a2 + a3 ) 2a1 a4 2 2 (9) Figure 2: Mecanismo plano de cuatro barras en una posición lı́mite externa Sustituyendo las longitudes de los eslabones se obtiene que α = 72.5423◦ Entonces el ángulo θ4L1 está dado por θ4L1 = 180◦ − α = 180◦ − 72.5423◦ = 107.4576◦ • Segunda condición de rotabilidad. Posición lı́mite interior |a4 − a1 | ≥ |a3 − a2 | (10) Sustituyendo las dimensiones correspondientes se obtiene |6 − 10| ≥ |8 − 2| o 4 6≥ 6 (11) Entonces el eslabón 4 no cumple con está condición de rotabilidad, por lo tanto tiene una posición lı́mite interior, vea la figura 3. El ángulo correspondiente se obtiene como cosβ = a21 + a24 − (a3 − a2 ) 2a1 a4 2 (12) Sustituyendo las longitudes de los eslabones se obtiene que β = 33.5573◦ Entonces el ángulo θ4L2 está dado por θ4L2 = 180◦ − β = 180◦ − 33.5573◦ = 146.4426◦ El paso final consiste en, dado que el eslabón 4 no puede rotar completamente, determinar el ángulo de oscilación, vea la figura 4, que está definido como φ4 = α − β. (13) Sustituyendo los valores correspondientes, se obtiene φ4 = 72.5423◦ − 33.5573◦ = 38.985◦ 3 (14) Figure 3: Mecanismo plano de cuatro barras en una posición de puntos muertos interior. Figure 4: Mecanismo plano de cuatro barras: Ángulo de oscilación del mecanismo 3 Ejemplo 2: Mecanismo doble rotatorio. Considere el mecanismo plano de cuatro barras mostrado en la figura 5, cuyas longitudes están dadas por a1 = 3, a2 = 6, a3 = 11, a4 = 9. Primeramente se determinará la clase del mecanismo empleando la condición de Grashoff, esto es: L+s≤p+q (15) Para este caso, la selección de los eslabones más largo, más corto e intermedios está dada por a1 = 3 = s, a3 = 11 = L, a2 = 6 = p, a4 = 9 = q. Sustituyendo las dimensiones correspondientes se obtiene 11 + 3 ≤ 6 + 9 o 14 ≤ 15 (16) Por lo tanto, el mecanismo es de la Clase I y puesto que el eslabón más pequeño es s = a1 = 3, el mecanismo es doble rotatorio. 4 Figure 5: Mecanismo plano de cuatro barras En una segunda etapa, este resultado se verificará empleando las condiciones de rotabilidad para los eslabones de entrada y de salida. 1. Eslabón 2 • Primera condición de rotabilidad. Posición de puntos muertos exterior. a1 + a2 ≤ a3 + a4 (17) Sustituyendo las dimensiones correspondientes se obtiene 3 + 6 ≤ 11 + 9 9 ≤ 20. o (18) • Segunda condición de rotabilidad. Posición de puntos muertos interior |a2 − a1 | ≥ |a4 − a3 | (19) Sustituyendo las dimensiones correspondientes se obtiene |6 − 3| ≥ |9 − 11| 3 ≥ 2. o (20) Se cumplen ambas condiciones de rotabilidad para el eslabón 2, por lo tanto, este eslabón puede rotar 360◦ . 2. Eslabón 4. • Primera condición de rotabilidad. Posición lı́mite exterior. a1 + a4 ≤ a2 + a3 (21) Sustituyendo las dimensiones correspondientes se obtiene 3 + 9 ≤ 6 + 11 5 o 12 ≤ 17. (22) • Segunda condición de rotabilidad. Posición lı́mite exterior |a4 − a1 | ≥ |a3 − a2 | (23) Sustituyendo las dimensiones correspondientes se obtiene |9 − 3| ≥ |11 − 6| o 6 ≥ 5. (24) Se cumplen ambas condiciones de rotabilidad para el eslabón 4, por lo tanto este eslabón 4 puede rotar 360◦ . Con este resultado se verifica que el mecanismo es doble rotatorio. Por lo tanto, no es necesario calcular ángulo de oscilación alguno. 4 Ejemplo 3: Mecanismo doble oscilatorio de la clase I. Considere un mecanismo de cuatro barras mostrado en la figura 6 cuyas longitudes están dadas por a1 = 7, a2 = 6, a3 = 3, a4 = 5. Figure 6: Mecanismo de cuatro barras Primeramente se determinará la clase del mecanismo empleando la condición de Grashoff, esto es L+s≤p+q (25) Para este caso, la selección de los eslabones más largo, más corto e intermedios está dada por a1 = 7 = L, a3 = 3 = s, a2 = 6 = p, a4 = 5 = q. Sustituyendo las dimensiones correspondientes se obtiene 7+3≤6+5 o 10 ≤ 11. (26) Por lo tanto, el mecanismo es de la Clase I y puesto que s = a3 = 3 el mecanismo es doble oscilatorio. En una segunda etapa, este resultado se verificará empleando las condiciones de rotabilidad para los eslabones de entrada y de salida. 6 1. Eslabón 2 • Primera condición de rotabilidad. Posición de puntos muertos exterior. a1 + a2 ≤ a3 + a4 (27) Sustituyendo las dimensiones correspondientes se obtiene 7+6≤3+5 13 6≤ 8 o (28) El eslabón 2 no cumple con está condición de rotabilidad, por lo tanto tiene una posición de puntos muertos exterior, vea la figura 7, el ángulo θ2D1 está dado por cos θ2D1 = a21 + a22 − (a3 + a4 ) 2a1 a2 2 (29) Sustituyendo las longitudes de los eslabones se obtiene que θ2D1 = 75.52◦ (30) Figure 7: Posición de puntos muertos exterior en un mecanismo plano de cuatro barras • Segunda condición de rotabilidad Posición de puntos muertos interior. |a2 − a1 | ≥ |a4 − a3 | (31) Sustituyendo las dimensiones correspondientes se obtiene |6 − 7| ≥ |5 − 3| o 1 6≥ 2. (32) El eslabón 2 no cumple con está condición de rotabilidad, por lo tanto, se presenta una posición de puntos muertos interior, vea la figura 8, el ángulo θ2D2 está dado por cos θ2D2 = a21 + a22 − (a4 − a3 ) 2a1 a2 2 (33) Sustituyendo las longitudes de los eslabones se obtiene θ2D2 = 15.35◦ 7 (34) Figure 8: Posición de puntos muertos interior en un mecanismo plano de cuatro barras. La conclusión es que el eslabón 2 es incapaz de rotar 360◦ . El paso final consiste en determinar el ángulo de oscilación, vea la figura 9, que está definido como φ2 = θ2D1 − θ2D2 . (35) Sustituyendo los valores de los eslabones se obtiene φ2 = 75.52◦ − 15.35◦ = 60.17◦ (36) Figure 9: Determinación del ángulo de oscilación del eslabón 2 en un mecanismo plano de cuatro barras. 2. Eslabón 4. • Primera condición de rotabilidad. Posición lı́mite exterior. a1 + a4 ≤ a2 + a3 8 (37) Sustituyendo las dimensiones correspondientes se obtiene 7+5≤6+3 12 6≤ 9. o (38) El eslabón 4 no cumple con está condición de rotabilidad; por lo tanto, el eslabón 4 tiene una posición lı́mite exterior, vea la figura 10, el ángulo correspondiente está dado por 2 a2 + a24 − (a2 + a3 ) cos α = 1 (39) 2a1 a4 Sustituyendo las longitudes de los eslabones se obtiene α = 95.73◦ (40) Entonces el ángulo θ4L1 está dado por θ4L1 = 180◦ − α = 180◦ − 95.73◦ = 84.27◦ (41) Figure 10: Posición lı́mite exterior en un mecanismo plano de cuatro barras. • Segunda condición de rotabilidad. Posición lı́mite interior. |a4 − a1 | ≥ |a3 − a2 | (42) Sustituyendo las dimensiones correspondientes se obtiene |5 − 7| ≥ |3 − 6| o 2 6≥ 3. (43) De acuerdo con este resultado, el eslabón 4 no puede rotar completamente; por lo tanto, el eslabón 4 presenta una posición lı́mite correspondiente, vea la figura 11, el ángulo θ4L2 está dada por 2 a2 + a24 − (a3 − a2 ) cos β = 1 (44) 2a1 a4 Sustituyendo las longitudes de los eslabones se obtiene β = 21.78◦ 9 (45) Figure 11: Posición lı́mite interior en un mecanismo plano de cuatro barras. y el ángulo θ4L2 está dado por θ4L2 = 180◦ − β = 180◦ − 21.78◦ = 158.21◦ (46) La conclusión es que el eslabón 4 no puede rotar completamente. El paso final consiste en determinar el ángulo de oscilación, vea la figura 12, el ángulo θ4L2 está dado por φ4 = α − β (47) Sustituyendo los valores correspondiente se obtiene φ4 = 95.73◦ − 21.78◦ = 73.95◦ Figure 12: Determinación del ángulo de oscilación φ4 en un mecanismo de cuatro barras 10 (48) 5 Ejemplo 4: Mecanismo doble oscilatorio de la clase II. Considere un mecanismo de cuatro barras mostrado en la figura 13, cuyas longitudes están dadas por a1 = 11, a2 = 6, a3 = 9, a4 = 7. Figure 13: Un mecanismo plano de cuatro barras Primeramente se determinará la clase del mecanismo empleando la condición de Grashoff, esto es L+s≤p+q (49) Para este caso, la selección de los eslabones más largo, más corto e intermedios está dada por a1 = 11 = L, a2 = 6 = s, a3 = 9 = p, a4 = 7 = q. Sustituyendo las dimensiones correspondientes se obtiene 11 + 6 ≤ 9 + 7 o 17 6≤ 16. (50) Por lo tanto, el mecanismo es de la clase II y por lo tanto es doble oscilatorio. En una segunda etapa, este resultado se verificará empleando las condiciones de rotabilidad para los eslabones de entrada y de salida. 1. Eslabón 2. • Primera condición de rotabilidad. Posición lı́mite exterior. a1 + a2 ≤ a3 + a4 . (51) Sustituyendo las dimensiones correspondientes se obtiene 11 + 6 ≤ 9 + 7 o 17 6≤ 16. (52) Es eslabón 2 no cumple con está condición de rotabilidad; por lo tanto, el eslabón 2 presenta una posición de puntos muertos exterior, vea la figura 14, el ángulo θ2D1 está dado por 2 a2 + a22 − (a3 + a4 ) cosθ2D1 = 1 (53) 2a1 a2 Sustituyendo las longitudes de los eslabones se obtiene θ2D1 = 138.59◦ 11 (54) Figure 14: Posición de puntos muertos exterior en un mecanismo plano de cuatro barras • Segunda condición de rotabilidad. Posición de puntos muertos interior. |a2 − a1 | ≥ |a4 − a3 | (55) Sustituyendo las dimensiones correspondientes se obtiene |11 − 6| ≥ |7 − 9| o 5≥2 (56) Por lo tanto, se verifica que el eslabón 2 cumple con está condición de rotabilidad. Figure 15: Ángulo de oscilación φ2 en un mecanismo plano de cuatro barras El paso final consiste en determinar el ángulo de oscilación, φ2 , vea la figura 15, el cual está definido como φ2 = 2 θ2D1 (57) Sustituyendo los valores correspondientes se tiene φ2 = 2 (138.59◦ ) = 277.18◦ 12 (58) 2. Eslabón 4. • Primera condición de rotabilidad. Posición lı́mite exterior. a1 + a4 ≤ a2 + a3 (59) Sustituyendo las dimensiones correspondientes se obtiene 11 + 7 ≤ 6 + 9 18 6≤ 15 o (60) El eslabón 4 no cumple está condición de rotabilidad; por lo tanto, el eslabón 4 presenta una posición lı́mite exterior, vea la figura 16, el ángulo θ4L1 está dado por cos α = a21 + a24 − (a2 + a3 ) 2a1 a4 2 (61) Sustituyendo las longitudes de los eslabones obtenemos que: α = 110.92◦ (62) Entonces el ángulo θ4L1 está dado por: θ4L1 = 180◦ − α = 180◦ − 110.92◦ = 69.07◦ (63) Figure 16: Posición lı́mite exterior en un mecanismo plano de cuatro barras. • Segunda condición de rotabilidad. Posición lı́mite interior. |a4 − a1 | ≥ |a3 − a2 | (64) Sustituyendo las dimensiones correspondientes se obtiene |7 − 11| ≥ |9 − 6| o 4≥3 (65) Este resultado muestra que el eslabón 4 si cumple con está condición de rotabilidad. 13 La conclusión es que el eslabón 4 es incapaz de rotar completamente. El paso final consiste en determinar el ángulo de oscilación, φ4 , vea la figura 17, el cual está definido como φ4 = 2α (66) Sustituyendo los valores correspondiente se obtiene φ4 = 2 (110.92◦ ) = 221.84◦ . Figure 17: Ángulo de oscilación φ4 en un mecanismo plano de cuatro barras 14 (67)