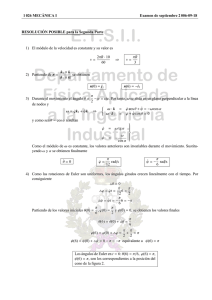
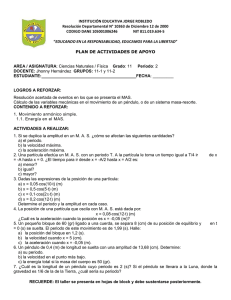
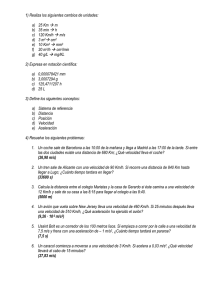
MECANISMO DE RETORNO RÁPIDO (LIMADORA) CRISTHIAN CAMILO CALDERÓN SOLÓRZANO (2145622) ADRIÁN MAURICIO SÁREZ GONZÁLEZ (2145650) UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO - MECÁNCAS ESCUELA DE INGENIERÍA MECÁNICA MECÁNICA DE MÁQUINAS BUCARAMANGA - SANTANDER 2107 - 2 MECANISMO DE RETORNO RÁPIDO (LIMADORA) CRISTHIAN CAMILO CALDERÓN SOLÓRZANO (2145622) ADRIÁN MAURICIO SÁREZ GONZÁLEZ (2145650) GRUPO: O1 EXPEDITO LOZANO GÓMEZ ING. MECÁNICO UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO - MECÁNCAS ESCUELA DE INGENIERÍA MECÁNICA MECÁNICA DE MÁQUINAS BUCARAMANGA - SANTANDER 2107 -2 INTRODUCCIÓN En el mundo de la ingeniería, es de vital importancia llevar a cabo diversas pruebas, experimentos, ensayos, etc, con el fin de contar con un apoyo o datos que validen la veracidad de los teoremas en los cuales se basa tal experiencia. También es importante reconocer que, en la actualidad, aparte de dichos estudios realizados manualmente, existen diversos programas que llevan la realidad a una simulación para que de esta manera, el análisis de factores determinados sea preciso y realmente confiable. Ahora bien, en este caso, se ha recurrido a hacer uso del software de Solidworks, en el cual se planteó y a la vez diseñó un mecanismo de retorno rápido (limadora), con lo que posteriormente se pudiera llevar a cabo un análisis de movimiento del mismo, obteniendo datos (tabulados respectivamente) y a su vez gráficas de aspectos solicitados y/o requeridos, como lo son: posición, velocidad y aceleración. De esta manera, como factor relevante igualmente se llevó a cabo la comparación entre los diversos métodos especificados a lo largo del presente documento para así demostrar la confiabilidad y precisión de los mismos a la hora de llevar a cabo un procedimiento de este tipo. 1. OBJETIVOS 1.1 OBJETIVO GENERAL Diseñar en Solidworks el mecanismo manivela – biela – balancín, para realizarle el debido estudio de movimiento, teniendo en cuenta factores como: el desplazamiento, la velocidad y la aceleración. Además, elaborar la debida comparación entre los diversos métodos utilizados para el análisis del mismo. 1.2 OBJETIVOS ESPECÍFICOS - - Reconocer el mecanismo de retorno rápido, sus características principales y representación gráfica. Diseñar el mecanismo solicitado por el docente en el Software Solidworks 2107. Por medio de las herramientas de dicho software, llevar a cabo el respectivo análisis de movimiento, tabulando resultados y elaborando las correspondientes gráficas. Llevar a cabo una comparación minuciosa entre diversos métodos de resolución del mecanismo con el fin de establecer la confiabilidad de los mismos. 2. ESQUEMA DE MECANISMO MANIVELA – BIELA – CORREDERA El mecanismo mostrado a continuación, representa el movimiento de una limadora. Elaborar los diagramas cinemáticos del bloque c. Sabiendo que: 𝑄2𝐴)𝑅 = 0.01 𝑚 = 𝑟2 𝑄4𝐵)𝑅 = 035 𝑚 = 𝑟4 𝐵𝐶)𝑅 = 0.186 𝑚 = 𝑟5 𝑄2 𝑄4)𝑅 = 0.175 𝑚 = 𝑟1 ℎ𝑟 = 0.425 𝑚 C 𝑟5 B h 𝑄2 A 𝑟1 𝑟4 𝑄4 ELEMENTO 𝑄4 𝑄2 = 𝑟1 𝑄2𝐴 = 𝑟2 𝑄4 𝐵 = 𝑟4 𝐵𝐶 = 𝑟5 h=h DIMENSIÓN REAL 0.175 m 0.100 m 0.350 m 0.186 m 0.425 m DIMENSIÓN DE DIBUJO 3.5 cm 2.0 cm 7.0 cm 3.72 cm 8.500 3. MECANISMO DE RETORNO RÁPIDO Un mecanismo de retroceso rápido puede definirse como aquel en el cual la carrera de trabajo útil, la que la máquina provee para el fin que es diseñada, se realiza despacio, mientras que la de retorno en vacío se hace a gran velocidad, consiguiéndose esto con un movimiento de rotación uniforme de la manivela. Es utilizado principalmente en máquinas herramientas, como las limadoras. Los movimientos de trabajo de la limadora son: - Movimiento de corte por desplazamiento longitudinal de la herramienta. Movimiento de avance por desplazamiento transversal de la pieza. Movimiento de profundidad de pasada por desplazamiento vertical de la herramienta. Las principales partes de la limadora: - - - MESA: sobre las guías verticales de la parte frontal de la bancada se apoya un carro provisto de guías horizontales sobre las que se desplaza la mesa propiamente dicha. BANCADA: es el elemento soporte de la máquina, aloja todos los mecanismos de accionamiento, suele ser de fundición y muy robusta. CARNERO O CARRO: es la parte móvil de la máquina, desliza sobre guías horizontales con forma de cola de milano, situadas en la parte superior de la bancada y en cuya parte frontal hay una torreta provista de un portaherramientas en el que se fija la herramienta de corte. MECANISMO DE ACCIONAMIENTO DEL CARNERO: hay varios tipos: por cremallera, por palanca oscilante y playo – manivela o hidráulico. 4. MÉTODO ANALÍTICO Este método resulta gracias al uso y/o empleo de diversas ecuaciones planteadas, esto con el fin de obtener determinados resultados finales que se desarrollan para el mecanismo como tal. 4.1 POSICIÓN 𝑟𝐴 (𝜃2 ) = √𝑟12 + 𝑟22 + 2𝑟1 𝑟2 sin(𝜃2 ) 𝜃4 (𝜃2 ) = tan−1 ( 𝑟1 + 𝑟2 sin(𝜃2 ) ) 𝑟2 cos(𝜃2 ) 𝜃5 (𝜃2 ) = 180 − sin−1 ( ℎ − 𝑟4 sin(𝜃2 ) ) 𝑟5 𝑟𝑐 (𝜃2 ) = 𝑟4 cos 𝜃4 (𝜃2 ) − √𝑟52 − (ℎ − 𝑟4 sin 𝜃4 (𝜃2 ))2 𝑆𝐶 (𝜃2 ) = 𝑟𝑂 +𝑟𝐶 (𝜃2 ) 4.2 VELOCIDAD ṙ𝐴 (𝜃2 ) = 𝑟2 𝑤2 sin(𝜃4 (𝜃2 ) − 𝜃2 ) 𝑤4 (𝜃2 ) = 𝑟2 𝑤2 cos(𝜃4 (𝜃2 ) − 𝜃2 ) 𝑟𝐴 (𝜃2 ) 𝑤5 (𝜃2 ) = − ṙ𝑐 (𝜃2 ) = 𝑟4 𝑤4 (𝜃2 )cos 𝜃4 (𝜃2 ) 𝑟5 cos 𝜃5 (𝜃2 ) 𝑟4 𝑤4 (𝜃2 ) sin(𝜃5 (𝜃2 ) − 𝜃4 (𝜃2 )) cos 𝜃5 (𝜃2 ) 4.3 ACELERACION: Ϋ𝐴 (𝜃2 ) = 𝑟𝐴 (𝜃2 )𝑤4 2 − 𝑟2 𝑤2 2 cos(𝜃4 (𝜃2 ) − 𝜃2 ) 𝛼4 (𝜃2 ) = 𝛼5 (𝜃2 ) = Ϋ𝐶 (𝜃2 ) = 1 (𝑟 𝑤 2 sin(𝜃4 (𝜃2 ) − 𝜃2 ) − 2ṙ𝐴 𝑤4 ) 𝑟𝐴 (𝜃2 ) 2 2 1 (𝑟 𝑤 2 sin 𝜃4 (𝜃2 ) + 𝑟5 𝑤5 2 sin 𝜃5 (𝜃2 ) − 𝑟4 𝛼4 cos 𝜃4 (𝜃2 )) 𝑟5 cos 𝜃5 (𝜃2 ) 4 4 −1 (𝑟5 𝑤5 2 + 𝑟4 𝑤4 2 cos(𝜃5 (𝜃2 ) − 𝜃4 (𝜃2 )) − 𝑟4 𝛼4 sin(𝜃5 (𝜃2 ) − 𝜃4 (𝜃2 )) cos 𝜃5 (𝜃2 ) 4.4 RESULTADOS Llevando a cabo la solución de las ecuaciones y teniendo en cuenta los valores de: 𝜃2 = 9.7° y 𝑤2 = 360 𝑟𝑝𝑚, se tiene: 4.4.1 Posición. 𝑠 = 0.064 𝑚 𝐶𝑎𝑟𝑟𝑒𝑟𝑎)𝑅 = 0.4 𝑚 4.4.2 Velocidad. 𝑘𝑣 = 3.6 𝑚⁄ 𝑠 𝑐𝑚 𝑚 𝑠 𝑚 𝑉𝑅𝑚𝑎𝑥 )𝑅 = 23.83 𝑠 𝑉𝑇𝑚𝑎𝑥 )𝑅 = 6.70 4.4.3 Aceleración. 𝑘𝑎 = 259.2 𝑚⁄ 𝑠2 𝑐𝑚 𝑚 𝑠2 𝑚 𝑎𝑅𝑚𝑎𝑥 )𝑓 = 1167.36 2 𝑠 𝑎𝑅𝑚𝑎𝑥 )𝑎 = 1802.24 5. MÉTODO GRÁFICO El método gráfico resulta de llevar a cabo un análisis de movimiento del mecanismo usando diferentes elementos de dibujo para una representación esquemática del mismo, claramente teniendo en cuenta factores como: el desplazamiento, la velocidad y la aceleración. Se debe tener en cuenta que para este caso, se hizo uso de las dimensiones de dibujo para llevar a cabo el debido estudio. 5.1 DATOS 5.1.1 Posición. 𝐶𝑎𝑟𝑟𝑒𝑟𝑎)𝑅 = 0.4 𝑚 5.1.2 Velocidad. 𝑚⁄ 𝑠 𝑘𝑣 = 3.6 𝑐𝑚 𝑚 𝑠 𝑚 𝑉𝑅𝑚𝑎𝑥 )𝑅 = 30.6 𝑠 𝑉𝑇𝑚𝑎𝑥 )𝑅 = 5.04 5.1.3 Aceleración. 𝑚⁄ 2 𝑘𝑎 = 259.2 𝑠 𝑐𝑚 𝑚 𝑠2 𝑚 𝑎𝑅𝑚𝑎𝑥 )𝑓 = 1166.4 2 𝑠 𝑎𝑅𝑚𝑎𝑥 )𝑎 = 2151.4 6. MÉTODO VIRTUAL (SIMULACIÓN EN SOLIDWORKS) Solidworks es un software ampliamente utilizado en la ingeniería gracias a su completo desarrollo para llevar acabo diseños sencillos o complejos de diversos elementos, como por ejemplo para este caso lo es un mecanismo de retroceso rápido, también conocido como limadora. Así pues, se diseñaron en él las diferentes piezas que conforman el mismo teniendo en cuenta que se trabajó con dimensiones reales, esto con el objetivo de que posteriormente se le realizara el estudio de movimiento, del cual, se obtuvieron tablas y gráficas respectivas (presentadas a continuación) que permitieran el debido análisis de factores como la posición (s), velocidad (v) y la aceleración (a) para 𝜃 = −34.85°, al igual se dan a conocer los valores de velocidad y aceleración máxima, ésta última comprendida como máxima de carrera de trabajo como de retorno. 6.1 POSICIÓN Tiempo (s) 0 0,000462963 0,000925926 0,001388889 POSICIÓN (m) 0 6,86988E-05 0,000271348 0,000602624 THETA -34,85 -33,85 -32,85 -31,85 0,122685185 0,123148148 0,123611111 0,124074074 0,124537037 0,401212782 0,401255933 0,401259925 0,401216017 0,401114866 230,15 231,15 232,15 233,15 234,15 0,165277778 0,165740741 0,166203704 0,166666667 0,000648387 0,00028488 7,03853E-05 0 322,15 323,15 324,15 325,15 0.50 0.48 0.46 0.44 0.42 0.40 0.38 0.36 Desplazamiento (m) 0.34 0.32 0.30 0.28 0.26 0.24 0.22 0.20 0.18 0.16 0.14 0.12 0.10 0.08 0.06 0.04 0.02 0.00 0.000 0.007 0.014 0.021 0.028 0.035 0.042 0.049 0.056 0.063 0.070 0.077 0.084 0.091 0.098 0.105 0.112 0.119 0.126 Tiempo (s) GRÁFICA DE DE POSICIÓN 6.2 VELOCIDAD Tiempo (s) 0 0,000462963 0,000925926 0,001388889 Velocidad (m/s) 1,40437E-13 0,294871448 0,578541091 0,85088226 THETA -34,85 -33,85 -32,85 -31,85 0,030555556 0,031018519 0,031481481 0,031944444 0,032407407 5,328583189 5,329069295 5,329107149 5,328714784 5,327908827 31,15 32,15 33,15 34,15 35,15 0,110648148 0,111111111 0,111574074 0,112037037 -0,219230424 -0,219801747 -0,215902433 -0,207531794 204,15 205,15 206,15 207,15 0.133 0.140 0.147 0.154 0.161 0.167 0,1125 -0,194740817 208,15 0,119444444 0,119907407 0,12037037 0,120833333 0,121296296 0,264086871 0,277422019 0,282210246 0,277080914 0,260645363 223,15 224,15 225,15 226,15 227,15 0,142592593 0,143055556 0,143518519 0,143981481 0,144444444 -18,21418737 -18,28232185 -18,29709804 -18,2608317 -18,1762911 273,15 274,15 275,15 276,15 277,15 0,165277778 0,165740741 0,166203704 0,166666667 -0,949554469 -0,62250482 -0,305878866 -2,80095E-10 322,15 323,15 324,15 325,15 6 5 4 3 2 1 0 -1 -2 Velocidad (m/s) -3 -4 -5 -6 -7 -8 -9 -10 -11 -12 -13 -14 -15 -16 -17 -18 -19 0.0000 0.0070 0.0140 0.0210 0.0280 0.0350 0.0420 0.0490 0.0560 0.0630 0.0700 0.0770 0.0840 0.0910 0.0980 0.1050 0.1120 0.1190 0.1260 0.1330 0.1400 0.1470 0.1540 0.16100.1667 Tiempo (s) GRÁFICA DE VELOCIDAD 6.3 ACELERACIÓN Tiempo (s) 0 0,000462963 0,000925926 0,001388889 Aceleración (m/s^2) 648,8923359 624,882372 600,5251223 575,9661704 THETA -34,85 -33,85 -32,85 -31,85 0,094907407 0,09537037 0,095833333 0,096296296 0,096759259 -138,7115821 -138,8982573 -138,9665139 -138,9073675 -138,7112567 170,15 171,15 172,15 173,15 174,15 0,115740741 0,116203704 0,116666667 0,11712963 0,117592593 80,59115408 82,70623551 83,02558688 81,35206036 77,49820121 215,15 216,15 217,15 218,15 219,15 0,134259259 0,134722222 0,135185185 0,135648148 0,136111111 -1468,107009 -1484,738862 -1491,302484 -1486,978535 -1471,092365 255,15 256,15 257,15 258,15 259,15 0,152777778 0,153240741 0,153703704 0,154166667 0,15462963 951,5464918 953,9684735 955,0016823 954,8683854 953,7540681 295,15 296,15 297,15 298,15 299,15 0,165277778 0,165740741 0,166203704 0,166666667 717,4198287 695,2969822 672,4105475 648,8923357 322,15 323,15 324,15 325,15 1000 900 800 700 600 500 400 300 Aceleración (m/s^2) 200 100 0 -100 -200 -300 -400 -500 -600 -700 -800 -900 -1000 -1100 -1200 -1300 -1400 -1500 0.0000 0.0070 0.0140 0.0210 0.0280 0.0350 0.0420 0.0490 0.0560 0.0630 0.0700 0.0770 0.0840 0.0910 0.0980 0.1050 0.1120 0.1190 0.1260 0.1330 0.1400 0.1470 0.1540 0.1610 Tiempo (s) GRÁFICA DE ACELERACIÓN 7. TABLA COMPARATIVA ENTRE MÉTODOS Factor Smax [m] Vmax trabajo [𝒎⁄𝒔] Vmax retorno [𝒎⁄𝒔] amax trabajo [𝒎⁄ 𝟐 ] 𝒔 amax retorno [𝒎⁄ 𝟐 ] 𝒔 Método analítico 0.4 Método Gráfico 0.4 % de error % de error 0 Método virtual 0.4012 6.706 5.04 24.84 5.3291 20.53 23.83 30.06 26.14 18.29 23.24 2419 2151.4 11.06 955.00 60.5 1734 1166.4 32.73 1491.30 13.99 0.3 Observando debidamente la tabla comparativa entre los diferentes métodos para el estudio o análisis del mecanismo teniendo en cuenta los factores o parámetros establecidos (desplazamiento, velocidad y aceleración), se puede establecer que los valores que resultan en cuanto al porcentaje de error son relativamente cercanos, por lo cual la confiabilidad entre los métodos gráfico y virtual tienen una semejanza, aunque levemente se recomienda hacer uso del virtual. 8. CONCLUSIONES Al finalizar el documento, se puede establecer que se llevó a cabo lo requerido inicialmente en los objetivos, teniendo en cuenta que se trata de un análisis minucioso, el cual e busca que sea lo más preciso posible. Ante el uso debido de fórmulas, representaciones tabuladas y en manera gráfica, conllevan a que se tenga un conocimiento más amplio sobre el tema en general sin escatimar la precisión y los datos. Ahora bien, se pudo establecer una comparación entre diferentes métodos que fueron utilizados a lo largo del documento para contextualizar un poco más sobre lo que se deseaba llevar a cabo. CIBERGRAFÍA http://losmecanismoshd.blogspot.com.co/2015/06/blog-post.html http://somim.org.mx/articulos2010/memorias/memorias2008/articulos/A1/A1_359.p df http://www.ingenieria.uaslp.mx/Documents/Apuntes/Cinem%C3%A1tica%20de%2 0las%20M%C3%A1quinas.pdf https://uvadoc.uva.es/bitstream/10324/1888/1/PFC-P%2020%3B%2021.pdf