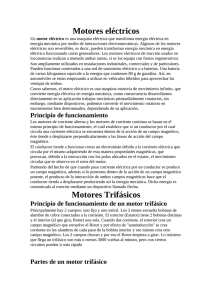
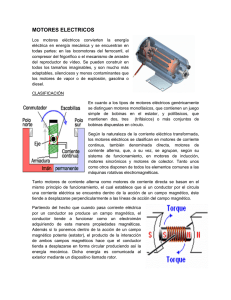
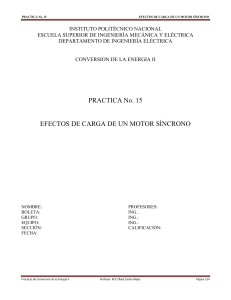
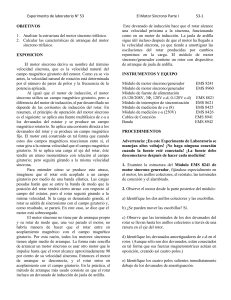
CAPITULO 6 MOTORES SÍNCRONOS Los motores síncronos y la corrección del factor de potencia • Figura 6-13 • Ejemplo 6-3. • El bus infinito de la figura 6-13 opera a 480 V. • La carga 1 es un motor de inducción que consume 100 kW con un factor de potencia de 0.78 en retraso, y la carga 2 es un motor de inducción que consume 200 kW con un factor de potencia de 0.8 en retraso. • La carga 3 es un motor síncrono cuyo consumo de potencia real es de 150 kW. • a) Si se ajusta el motor síncrono para operar con un factor de potencia de 0.85 en retraso. • ¿Cuál es la corriente en la línea de transmisión en este sistema? • b) Si se ajusta el motor síncrono para operar con un factor de potencia de 0.85 en adelanto, ¿cuál es la corriente en la línea de transmisión en este sistema? • c) Suponga que las pérdidas en la línea de transmisión están dadas por: • PPL = 3I2LRL pérdidas en la línea • donde PL representa las pérdidas en la línea. ¿Cuáles son las pérdidas de transmisión en ambos casos? Solución. • • • • • • • • • • a) En el primer caso la potencia real de la carga 1 es de 100 k W y la potencia reactiva de la carga 1 es: Q1 = P1 tan θ = (100 kW) tan (cos-1 0.78) = (100 kW) tan 38.7° = 80.2 kVAR • La potencia real de la carga 2 es de 200 kW y la potencia reactiva de la carga 2 es: Q2 = P2 tan θ = (200 kW) tan (COS-1 0.80) = (200 kW) tan 36.87° = 150 kVAR • La potencia real de la carga 3 es de 150 k W y la potencia reactiva de la carga 3 es: Q3 = P3 tan θ = (150 kW) tan (cos-1 0.85) = (150 kW) tan 31.8° = 93 kVAR • Por lo tanto la carga real total es : Ptot = P1 + P2 + P3 = 100 kW + 200 kW + 150 kW = 450 kW y la carga reactiva total es: Qtot = Q1 + Q2 + Q3 = 80.2 kVAR + 150 kVAR + 93 kVAR = 323.2 kVAR • El factor de potencia equivalente del sistema es de: • Por ultimo, la corriente en la línea está dada por: • b) Las potencias real y reactiva de las cargas 1 y 2 no cambian, ni tampoco la potencia real de la carga 3. La potencia reactiva de la carga 3 es: • Por lo tanto, la carga reactiva total es: • y la carga reactiva total es: • El factor de potencia equivalente del sistema es de: • Por último, la corriente en la línea está dada por: • c) Las pérdidas de transmisión en el primer caso son PPL = 3I2LRL = 3(667 A)2RL = 1 344 700 RL • Las pérdidas de transmisión en el segundo caso son PPL = 3I2LRL = 3(566 A)2RL = 961 070 RL • Nótese que en el segundo caso las pérdidas de transmisión de potencia son 28% menores que en el primer caso, mientras que la potencia suministrada a las cargas es la misma. • Puede ser útil tener una o más cargas en retraso (motores síncronos sobreexcitados) en el sistema por las razones siguientes: •1. Una carga en adelanto puede suministrar cierta potencia reactiva Q a las cargas cercanas en retraso, en lugar de que esta potencia tenga que venir del generador. Debido a que la potencia reactiva no tiene que viajar a través de las líneas de transmisión de alta resistencia, la corrienteen la línea de transmisión se reduce y las pérdidas en el sistema de potencia son mucho menores. (Esto se demostró en el ejemplo anterior.) •2. Debido a que las líneas de transmisión portan menos corriente, pueden ser menores para cierto flujo de potencia nominal. El equipo utilizado para un menor valor nominal de corriente reduce significativamente el costo del sistema de potencia. • 3. Además, si se requiere un motor síncrono para operar con un factor de potencia en adelanto, el motor debe girar sobreexcitado. Este modo de operación incrementa el par máximo del motor y reduce la posibilidad de exceder accidentalmente el par máximo. • La utilización de motores síncronos para incrementar el factor de potencia general se llama corrección del factor de potencia. • Cualquier motor síncrono que se encuentra en una planta se opera sobre excitado para poder corregir el factor de potencia e incrementar su par máximo. Capacitor o condensador • De hecho, a veces sseíncocmrporanuonmotor síncrono y se opera en vacío, simplemente para corregir el factor de potencia. En la figura 6-14 se muestra el diagrama fasorial de un motor síncrono sobreexcitado en vacío. Puesto que no sale potencia del motor, las distancias proporcionales a la potencia (EA sen δ e lA cos θ) son cero. Ya que la ecuación de la ley de voltaje de Kirchhoff para un motor síncrono es: • la cantidad jXsIA apunta hacia la izquierda y, por lo tanto, la corriente en el inducido IA apunta directamente hacia arriba. • • Si se examinan VΦ, e lA' la relación voltajecorriente entre ellos se parece a la de un capacitor. Un motor síncrono sobreexcitado en vacío parece un capacitor grande para el sistema de potencia. • Tales motores síncronos con propósito especial a menudo se llaman condensadores o capacitores síncronos. •En la figura 6-15a se puede observar la curva en V de un capacitor síncrono: 6.3 Arranque de los motores • ¿cómo llega el motor a ve l oc id a d síncrona? sín cr o no s • Para entender la naturaleza del problema de arranque, remítase a la figura 6-16. Ésta muestra un motor síncrono a 60 Hz en el momento en que se aplica potencia a los devanados del estator. El rotor del motor está estacionario y, por lo tanto, el campo magnético BR también. El campo magnético del estator Bs comienza a girar dentro del motor a velocidad síncrona. • La figura 6-16a muestra la máquina en el tiempo t = 0 s, cuando BR y BS están perfectamente alineados. Con la ecuación de par inducido: • El par inducido en el eje del rotor es cero. • En la figura 6-16b se observa la situación en el tiempo t = 1/240 s. En tan corto tiempo el rotor apenas se ha movido, pero el campo magnético del estator apunta ahora hacia la izquierda. Con la ecuación de par inducido, el par en el eje del rotor ahora tiene un sentido contrario al de las manecillas del reloj. • La figura 6-16c muestra la situación en el tiempo t = 1/120 s. En ese momento BR y BS apuntan en direcciones opuestas y τind es igual a cero una vez más. En el tiempo t = 1/60 s, el campo magnético del estator apunta hacia la derecha y el par resultante tiene el sentido de las manecillas del reloj. • Por último, en t = 1/60 s, el campo magnético del estator está alineado una vez más con el campo magnético del rotor y τind = 0. • Se pueden utilizar tres métodos para arrancar de manera segura un motor síncrono: • 1. Reducir la velocidad del campo magnético del estator a un valor lo suficientemente bajo como para que el rotor pueda acelerar y fijarse a él durante un semiciclo de la rotación del campo magnético. Esto se puede lograr con la reducción de la frecuencia de la potencia eléctrica aplicada. • 2. Utilizar un motor primario externo para acelerar el motor síncrono hasta velocidad síncrona, pasar por el procedimiento de entrada en sincronía y convertir la máquina al instante en un generador.Entonces, apagar o desconectar el motor principal para convertir la máquina síncrona en un motor. • 3. Utilizar devanados de amortiguamiento. En resumen, si una máquina tiene devanados de amortiguamiento, se puede encender siguiendo el procedimiento que se describe a continuación: 1. Desconectar los devanados de campo de su fuente de potencia de cd y que estén en cortocircuito. 2. Aplicar un voltaje trifásico al estator del motor y dejar que el motor acelere hasta llegar casi a velocidad síncrona. El motor no debe tener ninguna carga en su eje para que su velocidad nsinsce. pueda aproximar tanto como sea posible a 3. Conectar el circuito de campo cd a su fuente de potencia. Una vez que esto se lleva a cabo, el motor se fija a velocidad síncrona y se le pueden añadir cargas a su eje. Efecto de los devanados de amortiguación en la estabilidad del Si se añaden devanadmosodteoarmortiguamiento a una máquina síncrona para el arranque se obtiene una ventaja extra: un incremento en la edsetlabeisltiadtaodrgdieralaamuánqauvienlao.cEidlacdamcopnostmanatgennétsiincco, que varía sólo cuando varía la frecuencia del sistema. Si el rotor gira a nsinc, entonces los devanados de amortiguamiento no tienen ningún voltaje inducido. Si el rotor gira más lento que nsinc, entonces habrá un movimiento relativo entre el rotor y el campo magnético del estator y habrá un voltaje inducido en los devanados. Este voltaje produce un flujo de corriente y el flujo de corriente produce un campo magnético. La interacción entre los dos campos magnéticos produce un par que tiende a acelerar la máquina una vez más. Por otro lado, si el rotor gira más rápido que el campo magnético del estator, se producirá un par que intentará disminuir la velocidad del rotor. Por lo que, el par producido por los devanados de amortiguamiento acelera las máquinas lentas y disminuye la velocidad de . las máquinas rápidas. • Por lo tanto, estos devanados tienden a atenuar la carga u otros transitorios en la máquina. Por esta razón, a los devanados de amortiguamiento también se les llama devanados de atenuación Generadores síncronos y motores síncronos • Nótese de la figura que • 1. La característica distintiva de un generador síncrono (que suministra P) es que EA está delante de VΦ. mientras que en un motor EA está detrás de VΦ. •2. La característica distintiva de una máquina que suministra potencia reactiva Q es que EA cos δ > VΦ sin importar si la máquina actúa como generador o como motor. Si una máquina consume potencia reactiva Q, EA cos δ < VΦ. 6.5 Valores nominales en los motores síncronos •Puesto que los motores síncronos son físicamente iguales a los generadores síncronos, los valores nominales básicos de la máquina son los mismos. La principal diferencia es que un valor alto de EA produce un factor de potencia en adelanto en lugar de uno en retraso y, por lo tanto, el efecto del límite máximo de corriente de campo se expresa como un valor nominal con un factor de potencia en adelanto. Además, puesto que la salida de un motor síncrono es potencia mecánica, los valores nominales de un motor síncrono normalmente se expresan en caballos de potencia en lugar de kilowatts. • • La figura 6-21 muestra la placa de características de un motor síncrono grande. Además de la información que se observa en la figura, un motor síncrono pequeño tendríatambién el factor de servicio en su placa de características. En general, los motores síncronos son más adaptables a aplicaciones de bajas velocidades y altas potencias que los motores de inducción (véase el capítulo 7). Por lo tanto, se utilizan comúnmente para cargas de baja velocidad y alta potencia.