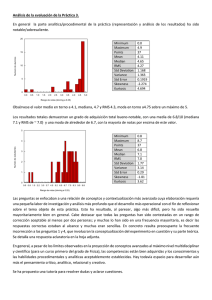
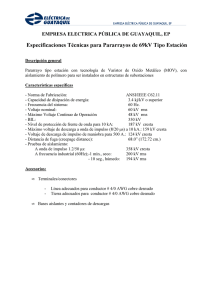
UNIVERSIDAD CATÓLICA BOLIVIANA SAN PABLO UNIDAD ACADÉMICA REGIONAL TARIJA Departamento de Ingenierías y Ciencias Exactas Carrera de Ingeniería Mecatrónica Resolvers y Synchros Investigación de Diseño Servomecánico Nicolas Vladimir Rejas Tórrez Tarija– Bolivia Septiembre de 2018 INTRODUCCIÓN En esta investigación se presentan las características de ambos transductores: synchros y resolvers; así como las diferencias que existen entre ellos y sus usos más frecuentes. DESARROLLO 1. Características y Similitudes. Ambos son transductores rotacionales de tipo electromagnético usados para medir posiciones y grados de rotación; poseen un rotor y un estator; y requieren de un proceso de digitalización para la correspondiente señal de salida AC; para ello, la mayoría de las veces se usan interfaces dedicadas de synchro/resolver ya existentes llamadas R/D converter (Resolver to digital converter), estas proveen condiciones apropiadas de señal de salida, además realizan todos los cálculos necesarios para convertir las salidas analógicas en información rotacional. A las señales de entrada de ambos dispositivos se les llama señales de excitación, en la mayoría, son de 26 Volts rms, a frecuencias de 60 ó 400 Hz., en casos en que la velocidad de rotación es muy alta, requieren frecuencias mayores a 1000 Hz. Si se desea cambiar el voltaje de funcionamiento, se debe cambiar proporcionalmente la frecuencia, sin embargo estos cambios causan un efecto adverso en la performance. Debido a su construcción y forma de funcionamiento, soportan altas temperaturas (dependiendo del modelo, de entre -196°C a 155°C), humedades, vibraciones, radiaciactividad y choques; por ello son apropiados para operar en ambientes hostiles, incluso puede usarse en el vacío absoluto (en el espacio exterior). Los problemas en el mantenimiento involucran sólo al rotor, Usualmente la precisión es de ±0.5%. 1. Resolvers. Puede ser descrito como el equivalente analógico de un encoder, provee precisión en su medición y una resolución teóricamente infinita. Consiste en un devanado rotatorio (rotor) y dos devanados estáticos (en el estator) desfasados 90°, cuando al devanado del rotor se le introduce una corriente AC, por la inducción electromagnética, este se comporta como un transformador, induciendo corriente a los devanados del estator, dependiendo de la posición angular del rotor, las salidas de los devanados tendrán una mayor o menor amplitud, en adición, como tienen un desfase de 4to de vuelta, es posible obtener una lectura única en cada posición angular. En algunos casos el devanado del rotor puede ser bifásico 2. Synchros. En su configuración más frecuente, los synchros se componen de 3 devanados fijos al estator, conectados en estrella y desfasados 120° entre sí, y un devanado en el rotor que al igual que en el caso anterior, es alimentado con un voltaje AC; luego se obtienen 3 señales de salida de las 3 bobinas secundarias, cuya amplitud y fase respecto de las de la bobina primaria dependen de la posición angular del rotor. 2. Diferencias. 1. Rangos de voltajes. 1.1 Synchros. 90 Volts rms entre líneas, 115 V rms para la referencia a frecuencia nominal de 400 Hz. ó 60 Hz. 11.8 Volts rms entre líneas, 26 V rms para la referencia a frecuencia nominal de 400 Hz. 1.2 Resolvers. 11.8 Volts rms entre líneas, 11.8 V rms para la referencia a varias frecuencias de entre 400 Hz. a 10000 Hz. 26 Volts rms entre líneas, 26 V rms para la referencia a varias frecuencias de entre 400 Hz. a 10000 Hz. 11.8 Volts rms entre líneas, 26 V rms para la referencia a varias frecuencias de entre 400 Hz. a 10000 Hz. 3. Usos. Pueden ser usados en todo tipo de aplicaciones en donde se requiera saber, controlar la posición angular de un motor o un elemento rotativo, las aplicaciones más comunes incluyen: motores de robots, antenas giratorias, sistemas de vigilancia BIBLIOGRAFÍA Data Acquisition Systems Engineering (2013), “What’s the difference between a Synchro and Resolver?”. En: < https://ueidaq.wordpress.com/2013/08/28/whats-the-difference-betweena-synchro-and-resolver/>, (fecha de consulta 25/09/2018). LTN SERVOTECHNIK (2018), “PREGUNTAS FRECUENTES SOBRE RESOLVERS”, En: <https://www.ltnservotechnik.com/es/servicio/preguntas-mas-frecuentes/faq-resolvers/>, (fecha de consulta 26/09/2018). SERVOTECHNIK (2018), “RESOLVERS”. En: <http://servotechnik.es/resolvers/>, (fecha de consulta 25/09/2018). MOOG COMPONENTS GROUP (2004), “Synchro and R o and Resolver Engineering Handbook”, En: <http://www.moog.com/literature/MCG/synchrohbook.pdf>, (fecha de consulta 26/9/2018).