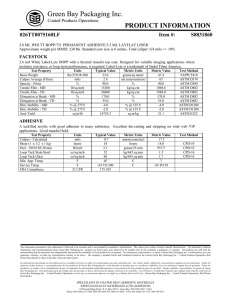
Conceptual Model of Salinity Intrusion by Tidal Trapping Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. R. C. Berger, Ph.D., P.E., D.CE, F.ASCE 1; and Jens Kiesel, Ph.D. 2 Abstract: Shallow bays along the fringe of an estuarine channel impact salinity distribution. The primary mechanism of impact has been termed “tidal trapping,” and is a result of the phase difference between the filling and emptying of the bay and the flow in the channel. This mechanism has been proposed as a major contributor to salinity intrusion in some locations. This paper creates a conceptual model to explain the increase or decrease in salinity intrusion based upon the channel tidal waveform and the character of the adjacent bay. Two idealized scenarios are used for this explanation: (1) Standing wave in the channel with a small phase lag in the bay tide; and (2) Progressive wave in the channel again with a small phase lag between the channel tide and the bay. This conceptual approach is useful for inspecting and understanding salinity intrusion processes in a complex estuary bay setting since the form of the wave can often be determined by generally available water surface gages along the estuary. A constructed numerical model of an estuary supports the conceptual model. DOI: 10.1061/(ASCE)HY.1943-7900.0001627. © 2019 American Society of Civil Engineers. Author keywords: Estuary; Tidal trapping; Added bay; Salinity intrusion; Two-dimensional hydraulics; Adaptive hydraulics model (AdH). Introduction The salinity field in an estuary is critical for the ecology of the waterway, and is also a concern for freshwater supply in industry, agriculture, and populations. However, anthropogenic modifications to the estuary or the river hydrograph impact the salinity environment. In some cases, these modifications will lead to greater salinity intrusion. Salinity penetrates within the estuary as a result of several mechanisms. Among others, these mechanisms include the tidal filling volume (tidal prism), different flood and ebb paths (tidal pumping), density-driven currents, and the influence of surrounding tidal bays (tidal trapping). A typical tide in an estuarine channel is a combination of two distinct waveforms: a progressive wave and a standing wave (e.g., Ippen and Harleman 1966). By assessing the apparent phase lag between successive tide gages or the amplification of the tidal range along an estuary, an investigator can determine the likely waveform at a location. The waveform can be derived from relatively inexpensive tide measurements, which are typically plentiful in estuaries. The relationship between velocity and tide can be attributed to these two primary waveforms. For the progressive tide, the velocity and tide are in phase with peak flood velocity occurring at high water elevation and peak ebb velocity at low water elevation. The standing wave peak flood velocity occurs at the midpoint in time as the water rises from low water elevation to high water elevation. Similarly, the peak ebb velocity happens at the midpoint in time as the water level falls. Salinity is a conservative constituent 1 Retired; formerly Research Hydraulic Engineer, Waterways Experiment Station, US Army Engineer Research and Development Center, 3343 Tucker Rd., Vicksburg, MS 39180 (corresponding author). Email: [email protected] 2 Research Scientist, Dept. of Ecosystem Research, Leibniz-Institute of Freshwater Ecology and Inland Fisheries (IGB), Berlin 12587, Germany; Dept. of Hydrology and Water Resources Management, Institute for Natural Resource Conservation, Christian-Albrechts-Univ. Kiel, Kiel 24118, Germany. Email: [email protected] Note. This manuscript was submitted on April 22, 2018; approved on February 15, 2019; published online on July 16, 2019. Discussion period open until December 16, 2019; separate discussions must be submitted for individual papers. This paper is part of the Journal of Hydraulic Engineering, © ASCE, ISSN 0733-9429. © ASCE that is transported with the velocity. The interrelationship with the waveform is important. The channel is often lined with bays along its length. The channel and bay flow and salinity interact. Tidal trapping is an important component of this interaction. Tidal trapping has been described as an exchange between bays and an adjacent estuarine channel in which a constituent (e.g., salinity) fills and empties out of phase with the main channel (Fischer et al. 1979). This exchange can be described by two processes, one driven by the channel currents and the other by the filling and emptying of the bay caused by water surface difference. The first process explains tidal trapping as a dispersion process induced by lateral velocity gradients within the main channel (Fischer 1972; Okubo 1973; Smith 1976; Simpson et al. 2001; Bowen and Geyer 2003). The currents along the channel have lateral gradients due to the friction of the channel and the irregularity of the channel edge. These lateral current gradients result in an exchange with the surrounding bays that is characterized by turbulence and by larger scale current eddies at the bay entrance. Usually, this process is modeled using one-dimensional cross sections in which the result of this tidal trapping is a smearing or dispersion process. The second process is exemplified by MacVean and Stacey (2011) in which the bay is long and its entrance narrow. They describe the process as advective rather than dispersive. As a tide progresses up an estuary, it will travel somewhat faster along the deeper portion of the channel. There is a tendency for flow to spread from the channel laterally into the shallower areas and into the bays along the fringe. This will cause the bays to fill and empty due to the water surface gradients. The filling and emptying will tend to be out of phase with the channel currents and salinity and modify the channel salinity. The bay’s geometry influences the impact of these two processes, wherein the first process becomes more important if the surrounding bay is small and its opening to the channel is large. That is, the bay is large compared to its opening into the channel. The second process is for bays that are long or large compared to their openings into the channel. Here, the exchange due to the water surface slope between the channel and the bay is much more important than the velocity gradient exchange at the entrance. This second process is considered in this paper. The previous MacVean and Stacey (2011) study is valuable in describing tidal trapping in complex estuary bay settings using 04019033-1 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng. Conceptual Model of Tidal Trapping and Salinity Intrusion Normalized Tide, Velocity, or Salinity A conceptual model is a tool used primarily for developing understanding of a process. The tool may also be helpful in making informed decisions for screening purposes. To develop this conceptual model, the authors utilize the waveform in the channel and link this waveform to tidal trapping through water-surface-driven flow exchange with the bay. As with the prior studies, the authors take a one-dimensional or cross-section average approach for the conceptual model. The channel is considered to be one-dimensional with a branch to represent the bay. The filling and emptying of the bay are a result of the rising and falling of the tide in the channel. The salinity in the channel is directly linked to the velocity there. The salinity reaches its maximum value at a channel location at the time of slack after flood. The channel salinity falls to its minimum at slack after ebb. With the bay filling in association with the tide and the salinity values associated with the currents, then it is reasonable to consider the waveform in the channel as a critical principle in developing a conceptual model. A progressive tide, as the name implies, progresses along the estuary and will have later and later times of high water at gages moving upland along the waterway [Fig. 1(a)]. The phase lag between gages will be close to that calculated by the wave celerity. With the progressive waveform, the velocity is synced with the wave. That is, high water elevation and the maximum upland (flood) velocity occur simultaneously and at low water elevation, the maximum oceanward (ebb) velocity occurs. Slack velocity then is at midtide elevation. This is the typical waveform for straight 1 0.5 0 -0.5 -1 -0.5 -0.25 0 (a) Normalized Tide, Velocity, or Salinity Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. detailed observations. A direct transfer of these results to other, even seemingly similar settings is, however, not possible, leaving the practical engineer only with the option to carry out detailed measurements or modeling just to understand the impact on salinity intrusion in their own region or estuary of interest. Therefore, in order to make qualitative predictions, the identification and generalization of processes impacting tidal trapping in a complex estuary bay setting is needed. Expanding on the work of MacVean and Stacey (2011), the authors develop a conceptual model to describe a simplified tidal trapping water surface slope-based mechanism. The conceptual model describes the important parameters and predicts the likely direction of the change (increase or decrease) to salinity intrusion caused by tidal trapping. The model is explained using two canonical cases of tidal trapping linked to the waveform in the channel and is confirmed by using a two-dimensional numerical model to evaluate the impact of an added bay with changing depths in an estuarine example. 0.25 0.5 0.75 1 0.5 0.75 1 Fraction of Cycle 1 0.5 0 -0.5 -1 -0.5 -0.25 0 0.25 Fraction of Cycle (b) Tide Velocity Salinity Bay Tide Fig. 1. Channel and bay tide phase lag, channel velocity, and salinity for (a) a progressive wave; and (b) for a standing wave. Please note the indication of the filling and emptying process of the bay. © ASCE 04019033-2 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng. Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. channels or ones in which there is not a strong convergence of the cross section in the upland direction. A standing wave, on the other hand, is a sloshing mode. A pure standing wave (for a quarter wavelength) will find all the channel stations experiencing high water at the same time. Peak maximum upland (flood) velocity occurs at the midtide elevation as the tide rises from low water to high water elevation [Fig. 1(b)]. Peak maximum oceanward (ebb) velocity occurs at midtide for falling tidal water elevation. The standing wave is the result of a wave reflection due to a closed upland end or a rapid cross-section convergence, which will cause an amplification of the tidal range. In a single channel with no accompanying bays, regardless of the waveform, the salinity is transported upstream during the time of flood velocity, normally reaching its maximum salinity at a location at slack water after flood. Alternatively, the location will normally find its minimum salinity at slack after ebb. This is when the salt water has been transported as far out of the estuary as possible. If a narrow-throated bay is added along the channel, it fills and empties with the tide. There can be a phase lag between the tide in the bay and an adjacent channel location. The lag may be due to the depth of the bay or a tenuous connection to the channel. These dependencies are described mathematically in the following formulation. The description involves the channel waveform and the phase lag between the bay tide and the channel tide. These conceptual model findings are then synthesized into a salinity intrusion index. Model Definition A simple mathematical description of the tides and velocity at a channel location is now given for a standing wave and a progressive wave. All explanations of the symbols utilized are given in the Notation section at the end of the paper. The water surface for the channel is defined as 2πt ηc ¼ ac Sin ð1Þ T and for the added side embayment as 2πt ηb ¼ ab Sin −δ T ð2Þ This lag is relative to the channel tide. The authors will consider the phase lag of the channel itself to be zero; the lag then is between the bay and the main channel. The flow into and out of the bay (from the channel) is assumed to be solely driven by the water surface differential. This means that the bay amplitude will be given by π ab ¼ ac Sin −δ ð3Þ 2 The maximum water surface elevation in the bay is determined by the elevation of the channel and the phase lag. The peak bay water surface elevation will match the channel water surface elevation at that time. A larger phase lag would then mean a smaller amplitude in the bay. If the bay planar area remains constant, then the reduction in the bay tide range results in a similar drop in the volumetric exchange with the channel. The authors will furthermore explain the phased filling and emptying of this bay and how that impacts the salinity of the channel. Bay filling and emptying is influenced by the channel tidal wave type. The tidal wave is likely a combination of a progressive wave and a standing wave. The authors separate these two wave © ASCE types and consider a purely progressive wave or a purely standing wave. The phase of the current velocity determines the wave type. The channel current velocity is given as follows: 2πt uc ¼ ûSin þ∝ ð4Þ T where û = maximum velocity in the channel adjacent to the bay. For a purely progressive tide, the value of α is zero. The velocity is in phase with the tide. For a standing wave, caused by a closed end of a channel, the value of α is π=2 radians (or a quarter tidal cycle). Herein, α will be termed the “velocity phase.” The following assumptions are used to facilitate an understanding and applicability of the model: • The bay tidal prism is sufficiently small so as not to materially impact the tidal prism of the estuary channel nearby. The impacts of the added bay are then a result of tidal trapping and not caused by increasing the estuarine channel tidal prism. • The analysis assumes a one-dimensional system in which the channel is considered to be cross-sectionally uniform. • The authors will further assume that the exchange between the bay and the channel is dominated by flow due to the lateral surface gradient and not by a turbulent or eddy-driven exchange at the entrance to the bay. This suggests that the connection between the bay and adjacent channel is narrow compared to the size of the bay. • Furthermore, the authors develop this conceptual model considering only the velocity, tide, and salinity in the channel adjacent to the bay. • The salinity is assumed to be a step function that has a value of ŝ for ½ tidal cycle. The salinity value in the channel adjacent to the added embayment is zero for the rest of the cycle. This means that the assumed salinity is a constant and during a flood, it doesn’t reach the bay location for ¼ T after the time of slack after ebb. The water has a value of salinity of ŝ for a ¼ T while the channel has a flood direction, and also for a ¼ T after the current has turned and is ebbing. The salt water reaches the bay position halfway through the flood flow and completely leaves this position by halfway through the ebb flow. This is true no matter what the waveform happens to be at this location. The assumption that the salinity reaches the bay location ¼ T before the slack flow after flood and recedes back to zero at a ¼ T afterwards is arbitrary. Any choice that results in salinity being present at the location that is symmetric in the time about slack after flood would suffice. All choices within this limitation would produce a conceptual model with qualitatively similar results. • The authors reason that an increase in the salinity at this station would result in an increase in salinity intrusion since the salt water is being transported past this location to the upstream regions. Similar reasoning is applied for a decrease in salinity at this location due to the presence of the bay. Conceptual Model Application To enable a clearer understanding of the illustrated conceptual model, the cases of two primary waveforms are described. The two forms are: (1) a standing wave in combination with a bay with a specified phase lag relative to the channel; and (2) a progressive wave in combination with a bay with a phase lag relative to the channel. 1. For the purely standing waveform, the velocity leads the water surface by π=2. Slack after flood occurs at high water elevation. From the assumptions on the salinity time history at the channel station, there is a half cycle with salinity (centered around high 04019033-3 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng. Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. water and flood slack) and the other half is totally fresh. With a phase lag between the channel tide and the bay tide, the velocity and the tide are shown in Fig. 1(b). The amplitude of the bay tide diminishes as the phase lag increases, as shown by Eq. (3). If there is no phase lag, then the channel and bay tide are identical. Whenever the bay tide is rising, the bay is filling with channel water and salinity. Channel salinity is also shown in Fig. 1(b). The salinity that enters the bay is that which is found in the channel adjacent to the bay. When the bay water surface is falling, the salinity concentration is leaving the bay and recedes back into the channel. Under the assumption of no mixing within the bay, the salt water will reenter the channel in the reverse order that it previously entered the bay. At first, the bay begins filling with freshwater and then later with salt water. Initially, consider the case in which there is no phase lag between the bay and channel tides. In this case, the salt water that enters the bay then exits back to the channel while the channel is still salty. Therefore, the bay has no impact on the channel salinity. If, however, there is a phase lag, then the filling of the bay is pushed later in time so that more time is spent filling while there is salt water in the channel. The bay will then return this saline water back to the channel partly while the channel is also saline but will also, for the time length of the bay tide phase lag, return saline water into a freshwater channel. This means that the tide phase lag from the channel to the bay will result in an increase in the salinity of the channel. And, in turn, the increased local salinity will create an increase in salinity intrusion. The larger the tide phase lag, the longer the fraction of the bay fill time is when there is salinity in the channel. This means that the bay salinity will be higher. The saline return flow back to the channel will also tend to occur during a time with low channel salinity. The phase lag of the bay tide from that of the channel means that for a standing waveform in the channel, the bay will increase salinity intrusion. With no phase lag, the bay will have no impact on channel salinity. 2. Now consider the filling and emptying of a small embayment along the channel, in which the channel tide is characterized as a progressive wave [Fig. 1(a)]. First, consider the case that the bay’s geometry causes no phase lag between the bay and the channel. The bay fills with rising bay tide and empties with falling bay tide in exactly the same manner as the standing wave case. For a fully progressive wave, the channel flow is in phase with the tide. This means that maximum flood velocity occurs at channel high water elevation and channel low water elevation is simultaneous with peak ebb velocity. In this scenario, the salinity reaches the channel location adjacent to the bay at high water and is completely swept out of the channel at low water. This means that the embayment fills with freshwater and then releases this freshwater back into the channel while the channel has a salinity of ŝ. The added embayment then is reducing the concentration in the channel and likely reducing the distance of salinity intrusion. Second, consider the case that there is a phase lag between the channel and bay tide, as shown in Fig. 1(a). In this case, if the bay fills later during the tidal cycle, it would tend to fill part of the time when the channel has salt water. This is in contrast to the no phase lag condition, which only filled with freshwater. The conceptual approach shows that this length of salt water filling time is the same length as the phase lag of the bay tide. A progressive tide with a bay tidal phase lag will also reduce the salinity intrusion, but less than the no phase lag condition. This is consistent with the site-specific findings of MacVean and Stacey (2011) in which the continued flood condition in the channel after high water elevation resulted in the maximum salinity at the channel station occurring before slack © ASCE water after flood. The fraction of the tide form that was progressive meant that the bay was emptying freshwater into the channel while the channel was still flooding. Here is a short summary of the findings. For the no bay phase lag, no channel waveform increases salinity intrusion. In fact, the progressive waveform would reduce salinity intrusion. If there is a bay phase lag, the standing wave tide will increase salinity intrusion. The progressive waveform would still reduce salinity intrusion, but not as much as the no phase lag condition. A typical tide in an estuarine channel is not purely a standing wave or a progressive wave. Instead, it is somewhere in between. This discussion now will be about the generalization of the conceptual model from these two canonical forms. The examples show that if the phase lag of the bay places the time of bay high water elevation at the same time as slack after flood in the channel, then the bay is neutral in terms of salinity intrusion. That is, it shouldn’t raise or lower the channel salinity because the peak flood velocity is midway through the time of the saline period in the channel. The phase lag for neutral conditions can then be calculated δn ¼ π −α 2 ð5Þ If the phase lag in the bay is greater than δ n then the bay tends to increase salinity intrusion. If the phase lag in the bay is less than δn then the bay will likely reduce salinity intrusion. This relationship between phase lag in the bay and the phase between the channel velocity and tide holds over all bay conditions for this conceptual model. Under certain limiting conditions, the relative impact of a bay on salinity intrusion can be developed for a range of α and δ conditions. The authors create a salinity intrusion index, SI , that can give some guidance on the relative salinity contribution to intrusion using the conceptual model. The index is positive for increased intrusion and negative for a reduction in intrusion. The magnitude of the index gives a suggestion of the strength of the impact. In order to produce this index, a significant additional constraint (assumption) is required. This assumption is that the bay tidal prism is directly proportional to the bay tide amplitude. This means that the bay plan area remains constant. This salinity index is defined in Eq. (6): R ð14þ2πδ ÞT SI ≡ δ ÞT ð−14þ2π SðtÞ dηdtb dt − ab ŝ ac ŝ ð6Þ Fig. 2 visualizes the salinity index, SI , for five velocity phases. The index synthesizes the conceptual model to a single graph. The index plots extend over the range of potential bay phase lags (from 0 to 0.25 cycle). This extends the two examples of a progressive wave and a standing wave. If the Eq. (6) numerator and denominator are each multiplied by the plan area, then the index can be explained in terms of volumes and salinity mass. The integral then would represent the salinity mass gained by the bay during filling. The terms that are subtracted in the numerator represent the mean salinity mass that the bay could potentially gain during filling at the given bay amplitude. The denominator then is used to normalize the index by using the average channel salinity times the maximum volume the bay could gain. This maximum volume is a result of the bay tide being identical to the channel tide. All this results in a normalized index with potential values between −1 and 1. The standing wave in Fig. 2 (∝ ¼ π2) is neutral at zero phase lag, but it shows an increase in salinity intrusion for all other phase lags. The index drops to zero at the maximum phase lag since the tide range in the bay is zero. For the purely progressive wave (∝ ¼ 0), 04019033-4 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng. 0.6 0.4 Salinity Indicator 0.2 0 -0.2 -0.4 -0.6 Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. -0.8 -1 0 0.05 0.1 0.15 0.2 0.25 Bay Tide Phase Lag (fraction of a cycle) Fig. 2. Salinity intrusion index showing the salinity indicator versus bay tide phase lag for five velocity phases (α). the index is negative throughout (except for the maximum phase lag point). This indicates that the progressive wave would tend to reduce salinity intrusion, but intrusion would be reduced less with greater bay phase lag. Other velocity phases are in between these extremes. The index could likely be scaled by the range of salinity at the location, as well as the planar area of the bay. This would perhaps make the index applicable between different sites along the estuary. In summary, the conceptual model shows: • The smaller the channel velocity phase is, the greater the reduction in salinity intrusion by a bay at that location is. A bay associated with a progressive tide form reduces salinity intrusion more than a standing wave. • As the phase lag is increased between the bay tide and the channel tide, an increase in channel salinity intrusion can be expected. This conceptual model and salinity intrusion index provide insight into the potential salinity change in the channel due to the addition or modification of a small bay. This also provides practical guidance for planning potential mitigation sites for restoration projects using wetlands. Numerical Example A numerical example is presented to test the conclusions developed with the conceptual approach. The numerical example is based on the Delaware estuary, but is invalidated and should be considered a representative flume for the purposes of this study. The bathymetry of the bay is artificially managed by the authors to illustrate points for the article and is not that found in the actual estuary. While the model is used as an example flume, the roughness coefficients are reasonable (Manning’s n of 0.025 for most of the estuary and 0.030 in the very shallow regions). The numerical code used is the twodimensional module of the adaptive hydraulics model (AdH) (Berger and Lee 2005; Savant et al. 2011) and is a shallow water model with baroclinic pressure terms. The AdH calculates water surface, velocity, and salinity. Since this module of the AdH is two-dimensional, complete vertical mixing is assumed. The standard procedure was followed to demonstrate spatial and temporal computational convergence. The details are not necessary for the purposes of this article. Fig. 3 shows a representation of the model domain. There is also an ocean area that is not shown in Fig. 3. © ASCE This domain includes a bay that can be added or removed to assess its impact. The tidal phase lag between the bay and channel is produced by varying the depth of the added bay. The model is run with a tide that is a pure semi-diurnal tide period of 12.42 h (the principal lunar semi-diurnal component, M2) with a range of 0.924 m. While this is the only driving tidal component, the nonlinear nature of the system also generates overtides (of higher frequencies). The river inflow is a constant 50 m3 =s. After running for a long enough time so that the salinity field reaches an equilibrium, every tidal cycle thereafter has the identical water surface, velocity, and salinity at a specific location and phase of the cycle. Results are reported for the final complete cycle of a 2,000-h simulation. This simulation length is over 160 tidal cycles. The conceptual model uses inputs from the numerical model in terms of the hydrodynamic descriptions. These inputs include the velocity phase in the channel and the phase lag between the water surface in the channel and the bay tides. The velocity phase is from the base condition in which there is no bay. Data throughout this comparison will be drawn from two stations shown in Fig. 3 (inset). The stations are labeled TC and TB for stations in the channel adjacent to the bay and within the bay, respectively. The base condition is provided with no added bay, that is, the bay is removed. The two plans are a constant bay elevation of 0 m (Plan 1) and a constant bay elevation of 0.5 m (Plan 2). Fig. 3 shows the elevations for the channel bed. Fig. 4 shows the simulated tide and velocity at station TC. The velocity phase is about 1.8 h, which in terms of radians is 0.28π. This is a fairly even mix of a progressive and a standing wave. Fig. 5 shows the water surface elevation for station TC for the base condition and the water surface time history in the bay at station TB for the two plans. The phase lag for Plan 1 is about 0.75 h and for Plan 2 it is about 1.0 h. These lags are 0.06 and 0.08 of a tidal cycle, respectively. In terms of radians, this is a phase lag of 0.12π for Plan 1 and 0.16π for Plan 2. There is a significant shallow water effect in Plan 2, given by the longer phase lag for low water than for high water. The neutral phase lag [from Eq. (5)] is found to be 0.22π. Since both values are less than δ n , the conceptual model would suggest that each value would reduce salinity intrusion. Plan 1 would be expected to reduce salinity intrusion more than Plan 2. The same information can be determined using the salinity intrusion index from Fig. 2. The salinity intrusion index for the two plans would be −0.37 for Plan 1 and −0.24 for Plan 2. The salinity intrusion index is a rough prediction of the salinity of the bay scaled by the salinity range and the ratio of the bay tide to the channel tide range. The salinity intrusion index of zero would imply the bay salinity to be about that of the channel. Fig. 6 shows the salinity at TC for the base condition and the bay salinity at TB for the two plans. The average salinity for the base at the channel station is 20.4 ppt, while the bay average salinity at TB is 19.0 for Plan 1 and 19.8 for Plan 2. The greater phase lag in Plan 2 leads to higher bay salinity. The channel salinity profile for the base and plans is shown in Fig. 7. This is a profile along the channel thalweg. The profile begins at Station TC and progresses upstream (landward). The base shown is the salinity at the time of maximum intrusion. The two plans are shown as differences from the base at that same time. Both plans lower the salinity in the upper reach, reducing intrusion. Plan 2, however, has a higher salinity than Plan 1. Plan 2 has a greater salinity intrusion than Plan 1, but less salinity intrusion than the base. This finding supports the conceptual model conclusions. Fig. 8 shows the 25 ppt isohaline for the base and Plan 2 conditions at a time of minimum salinity. This is for a region oceanward of the fringe bay. The difference between the base and Plan 2 shows that with the added bay, the preferred path for freshwater is 04019033-5 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng. Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. Fig. 3. Spatial overview of the Delaware River Estuary and its depth distribution with small bay denoted and inset showing the detailed location of the gage sites (TB in the bay and TC in the channel). much more on the west side of the estuary (away from the bay). The bay fills from much of the channel cross section, but empties along the channel eastern shore. This is a subtlety that a conceptual model cannot represent and serves as a cautionary note regarding the limitations of a simple representation like this one. The conceptual model assumes channel cross-section uniformity and the model results show that is a weak assumption here. Nevertheless, the conceptual model provides meaningful insight. © ASCE Conclusions A conceptual model should be simple enough that the behavior is represented and the results are understandable. Its goal is to provide insight into the direction of change (increasing, decreasing, or no change) resulting from a feature such as an added bay. The authors have developed a conceptual model to describe the impact on salinity intrusion caused by tidal trapping in an estuary. The description 04019033-6 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng. 2 1.5 1 0.5 0 -0.5 0 20 -0.1 -0.2 15 -0.3 10 -0.4 5 0 0 4 8 12 Tide [m] -0.5 0 20 Base Velocity [m/s] Fig. 4. Channel station (TC) water surface elevation and velocity, base condition. 40 60 -0.6 Distance Upstream of Bay [km] 16 Time [hrs] Plan1-Base Plan2-Base Fig. 7. Longitudinal salinity profile at maximum intrusion for the base condition and the difference between each plan and base; absolute base salinity is shown on the left y-axis and the differences (Δ) between base conditions and the plans are shown on the right y-axis. Water Surface Elevation [m] 3 2.5 2 1.5 1 0.5 0 4 8 12 16 Time [hrs] TC Base TB Plan1 TB Plan2 Fig. 5. Water surface elevation at station TC for base condition and at bay station TB for Plans 1 and 2. 24 22 Salinity [ppt] Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. -1 25 Salinty (Plan-Base) [ppt] 2.5 Base Salinity [ppt] Wat. Surf. Elev. or Velocity 3 Salinity (25ppt) 20 Base (no Bay) 18 Plan 2 (Bay 0.5m deep) 16 0 4 8 12 16 Time [hrs] TC Base TB Plan1 TB Plan2 Fig. 6. Salinity for station TC for the base condition and bay station TB for Plans 1 and 2. Fig. 8. Spatial overview of the minimum salinity 25 ppt isohaline for base and Plan 2 conditions. is applicable to bays that have sufficiently narrow connections to the channel so that the exchange is dominated by the flow due to surface water slope, rather than the turbulent exchange at the entrance to the bay. The bay should not be so large as to significantly impact the tidal prism of the main channel. The conceptual model demonstrates that the form of the tide wave in the channel and the tidal phase lag of the bay are the most important factors. A stronger component of a progressive wave will tend to suggest a reduction in © ASCE 04019033-7 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng. Downloaded from ascelibrary.org by Universidad de la Sabana on 08/05/19. Copyright ASCE. For personal use only; all rights reserved. the channel salinity intrusion with the bay. A stronger standing wave component has a more neutral effect. In both cases, any geometric change to the bay that increases the water surface lag between the bay and the adjacent channel will favor an increase in salinity intrusion. The value of this conceptual model is that the waveform of the tide in most channels is known. The geometry and bathymetry of the associated bays are also typically known. Often, the only initial data that a planner or researcher has are the tidal records along an estuary. These tidal records are often adequate to determine the form of the tide. The conceptual model is supported by using a numerical model based on an estuary flume example. The numerical model results are in accord with the expectations of the conceptual model. The conceptual model illustrates that seemingly small features, such as these small bays, can play an important role in the salinity distribution in the estuary. Estuarine modelers validate their models for hydrodynamics, often by comparisons to field tides and tidal fluxes. This conceptual model suggests that even though these small bays may not noticeably contribute to the tidal flux or modify the tide, they could have a strong influence on the salinity intrusion length and distribution. This then requires the modelers to accurately represent these small and perhaps shallow features. The conceptual model is useful in understanding the likely direction of the salinity change as a result of a proposed added feature, such as wetland restoration sites or marinas. The conceptual model also provides a reasonable understanding of the salinity intrusion caused by tidal trapping. Future work can focus on further generalization of the model and reducing the number of assumptions. This work could include a consideration of the range of the salinity and planar area of the bay in generalizing the salinity intrusion index to different sites along the estuary. Acknowledgments While one of the authors (Berger) is a retiree of the U. S. Army Corps of Engineers Research and Development Center, this paper was created independent of that organization. J.K. acknowledges funding obtained through the GLANCE project (Global change effects on river ecosystems; 01LN1320A) supported by the German Federal Ministry of Education and Research (BMBF). The authors also acknowledge the valuable contributions of the reviewers and the associate and chief editors. Notation The following symbols are used in this paper: ab = tidal amplitude of the bay; © ASCE ac = SðtÞ = SI = ŝ = T= t= uc = û = ∝= δ= δn = ηb = ηc = tidal amplitude of the channel adjacent to the bay; channel salinity as a function of time; salinity intrusion index; salinity maximum in the channel (a step function); tidal period; time; channel velocity, adjacent to the bay, as a function of time; maximum channel velocity, adjacent to the bay; angle in radians by which the velocity leads the water surface; phase lag of the tide in the bay compared to the tide in the channel; neutral phase lag; bay water surface elevation; and channel water surface elevation. References Berger, R. C., and L. M. Lee. 2005. Multidimensional numerical modeling of surges over initially dry land. Technical Rep. No. ERDC/CHL TR-04-10. Vicksburg, MS: US Army Corps of Engineers, Engineer Research and Development Center. Bowen, M. M., and W. R. Geyer. 2003. “Salt transport and the timedependent salt balance of a partially stratified estuary.” J. Geophy. Res. 108 (C5): 3158. https://doi.org/10.1029/2001JC001231. Fischer, H. B. 1972. “Mass transport mechanisms in partially stratified estuaries.” J. Fluid Mech. 53 (4): 671–687. https://doi.org/10.1017 /S0022112072000412. Fischer, H. B., E. J. List, R. C. Y. Koh, J. Imberger, and N. H. Brooks. 1979. Mixing in inland and coastal waters, 483. New York: Academic Press. Ippen, A. T., and D. R. F. Harleman. 1966. “Tidal dynamics in estuaries.” In Estuary and coastline hydrodynamics, edited by A. T. Ippen, 493–499. Iowa City, IA: Iowa Institute of Hydraulic Research. MacVean, L. J., and M. T. Stacey. 2011. “Estuarine dispersion from tidal trapping: A new analytical framework.” Estuaries Coasts 34 (1): 45–59. https://doi.org/10.1007/s12237-010-9298-x. Okubo, A. 1973. “Effect of shoreline irregularities on streamwise dispersion in estuaries and other embayments.” Neth. J. Sea Res. 6 (1–2): 213–224. https://doi.org/10.1016/0077-7579(73)90014-8. Savant, G., C. Berger, T. O. McAlpin, and J. N. Tate. 2011. “Efficient implicit finite-element hydrodynamic model for dam and levee breach.” J. Hydraul. Eng. 137 (9): 1005–1018. https://doi.org/10.1061/(ASCE) HY.1943-7900.0000372. Simpson, J. H., R. Vermeil, and A. J. Souza. 2001. “The salt fluxes in a tidally-energetic estuary.” Estuarine Coastal Shelf Sci. 52 (1): 131–142. https://doi.org/10.1006/ecss.2000.0733. Smith, R. 1976. “Longitudinal dispersion of a buoyant contaminant in a shallow channel.” J. Fluid Mech. 78 (04): 677–688. https://doi.org/10 .1017/S0022112076002681. 04019033-8 J. Hydraul. Eng., 2019, 145(10): 04019033 J. Hydraul. Eng.