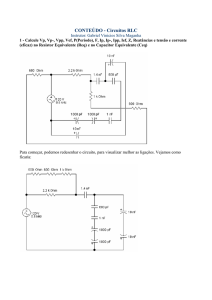
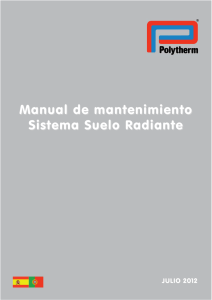
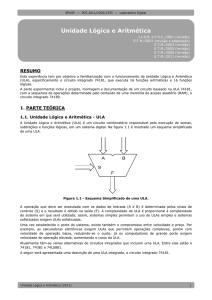
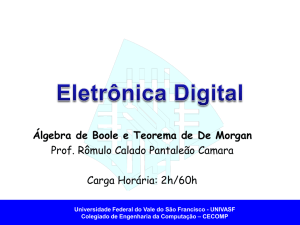
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA LEANDRO SILVEIRA QUINTÃO PROJETO DE DIPLOMAÇÃO INDUTÍMETRO DIGITAL Porto Alegre (2011) UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INDUTÍMETRO DIGITAL Projeto de Diplomação apresentado ao Departamento de Engenharia Elétrica da Universidade Federal do Rio Grande do Sul, como parte dos requisitos para Graduação em Engenharia Elétrica. ORIENTADOR: Yeddo Braga Blauth Porto Alegre (2011) UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA LEANDRO SILVEIRA QUINTÃO INDUTÍMETRO DIGITAL Este projeto foi julgado adequado para fazer jus aos créditos da Disciplina de “Projeto de Diplomação”, do Departamento de Engenharia Elétrica e aprovado em sua forma final pelo Orientador e pela Banca Examinadora. Orientador: ____________________________________ Prof. Yeddo Braga Blauth, UFRGS. Doutor pela Universidade Federal de Santa Catarina – UFSC Florianópolis, Brasil. Banca Examinadora: Prof. Gilson Wirth, UFRGS Doutor pela University of Dortmund – Dortmund, Alemanha. Prof. Eric Fabris, UFRGS Doutor pela Universidade Federal do Rio Grande do Sul - UFRGS – Porto Alegre, Brasil. Porto Alegre, Dezembro de 2011. DEDICATÓRIA Dedico este trabalho aos meus pais, em especial pela dedicação e apoio em todos os momentos difíceis. Dedico também à esposa e filhos que compreenderam a ausência durante esse tempo. AGRADECIMENTOS Aos pais que sempre me incentivaram a estudar e que realizaram inúmeros esforços para sempre me presentear com educação de qualidade. Aos colegas pelo seu auxílio nas tarefas desenvolvidas durante o curso e apoio na revisão deste trabalho. À empresa que me apoiou desde o começo do curso compreendendo todos os horários alternados desses anos. À Universidade, professores, funcionários, À esposa e filhos que compreenderam as ausências e nervosismos destes longos anos. RESUMO Este documento foi criado para detalhar a construção de um medidor digital de indutância desde a análise teórica dos circuitos que compõe o projeto, detalhamento da construção prática e especificação das programações envolvidas. Análise dos resultados e comparação com outros equipamentos já existentes no mercado. Palavras-chaves: Engenharia Elétrica. Frequência. Indutância. Eletrônica e Instrumentação. ABSTRACT This document was created to detail the construction of a digital meter inductance from the theoretical analysis of the circuits that make up the design, construction detailing and specification practice schedules involved. Analysis of results and comparison with other devices already on the market. Keywords: Electrical Engineering. Frequency. Inductance. Electronic and Instrumentation. SUMÁRIO 1 INTRODUÇÃO ................................................................................................................... 12 2 ANÁLISE DE ALTERNATIVAS....................................................................................... 13 3 ANÁLISE DO CIRCUITO ADOTADO ............................................................................. 17 3.1 3.2 Análise Teórica do Circuito LC ................................................................................. 20 Cálculo da Função () com = 0,1 ................................................................ 24 3.2.1 Primeira Interação ............................................................................................... 24 3.2.2 Segunda Interação ............................................................................................... 26 3.2.3 Terceira Interação ................................................................................................ 28 3.2.4 Quarta Interação .................................................................................................. 30 3.2.5 Quinta Interação .................................................................................................. 32 3.2.6 Sexta Interação .................................................................................................... 34 3.2.7 Sétima Interação .................................................................................................. 36 3.2.8 Oitava Interação .................................................................................................. 38 3.3 3.4 3.5 3.6 Cálculo da Função () com = 1 ................................................................... 40 Cálculo da Função () com = 50 ................................................................. 42 Cálculo da Função () com = 10 ................................................................. 41 Cálculo da Resposta de Frequência do Circuito Oscilador ........................................ 42 4 PROJETO DA PARTE ANALÓGICA ............................................................................... 44 4.1 Fonte de Alimentação ................................................................................................. 45 4.2 Oscilador LC .............................................................................................................. 45 4.3 Buffer.......................................................................................................................... 46 4.4 Redutor de Tensão ...................................................................................................... 46 5 PROJETO DA PARTE DIGITAL ....................................................................................... 48 5.1 Plataforma de Programação e Compilação ................................................................ 49 5.2 Fluxograma de Operação............................................................................................ 50 5.3 Descrição do Programa .............................................................................................. 53 6 RESULTADOS ALCANÇADOS ....................................................................................... 62 6.1 Montagem ................................................................................................................... 62 6.2 Testes de Medidas ...................................................................................................... 63 7 CONCLUSÃO ..................................................................................................................... 66 8 BIBLIOGRAFIA ................................................................................................................. 67 LISTA DE TABELAS Tabela 1 FAIXA DE INDUTÂNCIA COM RESPECTIVA FREQUÊNCIA DE OPERAÇÃO E RESISTÊNCIA EM SÉRIE......................................................... 16 Tabela 2 Tabela 3 Tabela 4 COMPARAÇÃO DOS VALORES DE FREQUENCIA ...................................... 43 VALORES DE ................................................................................................. 53 COMPARATIVO DE MEDIÇÕES ...................................................................... 65 LISTA DE FIGURAS Figura 01 Primeiro Circuito Estudado ................................................................................... 13 Figura 02 Gráfico da Corrente I em função do Tempo .......................................................... 13 Figura 03 Segundo Circuito Estudado ................................................................................... 14 Figura 04 Tensão de Entrada e Tensão no Indutor ................................................................ 15 Figura 05 Circuito Oscilador LC com Schmitt Trigger ......................................................... 17 Figura 06 Curva x ........................................................................................................ 18 Figura 07 Formas de Ondas Características do circuito oscilador LC com Schmitt Trigger 18 Figura 08 Circuito Equivalente Quando está em nível alto .............................................. 19 Figura 09 Circuito Equivalente Quando está em nível baixo ........................................... 20 Figura 10 Circuito Equivalente Quando está em nível alto com resistência Interna do Indutor.................................................................................................................... 20 Figura 11 Circuito Equivalente Quando está em nível baixo com resistência Interna do Indutor.................................................................................................................... 22 Figura 12 Tensão no Capacitor ( ) x Tempo () – Primeira Interação ............................... 25 Figura 13 Corrente do Indutor () x Tempo () – Primeira Interação................................... 26 Figura 14 Tensão no Capacitor ( ) x Tempo () – Segunda Interação ............................... 27 Figura 15 Corrente do Indutor () x Tempo () – Segunda Interação................................... 28 Figura 16 Tensão no Capacitor ( ) x Tempo () – Terceira Interação ............................... 29 Figura 17 Corrente do Indutor () x Tempo () – Terceira Interação ................................... 30 Figura 18 Tensão no Capacitor ( ) x Tempo () – Quarta Interação .................................. 31 Figura 19 Corrente do Indutor () x Tempo () – Quarta Interação ..................................... 32 Figura 20 Tensão no Capacitor ( ) x Tempo () – Quinta Interação .................................. 33 Figura 21 Corrente do Indutor () x Tempo () – Quinta Interação ..................................... 34 Figura 22 Tensão no Capacitor ( ) x Tempo () – Sexta Interação .................................... 35 Figura 23 Corrente do Indutor () x Tempo () – Sexta Interação ....................................... 36 Figura 24 Tensão no Capacitor ( ) x Tempo () – Sétima Interação.................................. 37 Figura 25 Corrente do Indutor () x Tempo () – Sétima Interação ..................................... 38 Figura 26 Tensão no Capacitor ( ) x Tempo () – Oitava Interação .................................. 39 Figura 27 Corrente do Indutor () x Tempo () – Oitava Interação ...................................... 40 Figura 28 Circuito Analógico................................................................................................. 44 Figura 29 Fonte de Alimentação ............................................................................................ 45 Figura 30 Circuito Digital ...................................................................................................... 48 Figura 31 Circuito de Gravação do Microcontrolador ........................................................... 48 Figura 32 Fluxograma de Operação ....................................................................................... 50 Figura 33 Indutância x Contagem do Timer .......................................................................... 52 Figura 34 Display LCD .......................................................................................................... 56 Figura 35 Exemplo de Medição no Display LCD .................................................................. 58 Figura 36 Montagem do Circuito Analógico ......................................................................... 62 Figura 37 Montagem do Circuito Digital ............................................................................... 63 Figura 38 Indutores de Teste .................................................................................................. 64 Figura 39 Indutor de Teste ..................................................................................................... 64 Figura 40 Indutor de Teste Variável ...................................................................................... 65 12 1 INTRODUÇÃO Todo aluno, projetista ou técnico que estuda ou trabalha na área de eletrônica irá se deparar em algum instante em sua carreira com circuitos que possuem indutâncias. Sejam circuitos osciladores, sejam fontes chaveadas ou filtros, ou qualquer outro projeto, o indutor é um componente importante e muito utilizado. Porém é um componente que não possui larga escala de valores comerciais. Muitos projetos de circuitos eletrônicos irão se deparar com a construção de um indutor próprio para aquele projeto. Neste instante irão entrar informações do tipo núcleo, espessura do fio, tamanho e forma da espira, e número de espiras, para encontrar o valor final da indutância. E como pode ser confirmado se o valor da indutância está certo, se realmente atingiu o valor esperado? Por isso a ideia de um medidor de indutância que poderá verificar os componentes já existentes, confirmar valores de indutores criados, auxiliando o estudante ou técnico em bancada. 13 2 ANÁLISE DE ALTERNATIVAS Para realizar a medida do valor da indutância, é preciso um circuito onde alguma característica varie como função da indutância. No início do trabalho vários circuitos foram estudados. Dois deles são apresentados a seguir. O primeiro circuito estudado é mostrado na figura 01: I Figura 01: Primeiro circuito estudado No circuito da figura 01, é uma tensão e é um transistor, operando como chave, ou seja, abrindo e fechando com uma determinada frequência. Quando fecha, a corrente aumenta linearmente. Quando abre, o indutor se descarrega pelo diodo e diminui. A função da corrente em relação ao tempo é mostrada no gráfico da figura 02. I Son Soff Ix tx t Figura 02: Gráfico da corrente I em função do tempo 14 Medindo-se o valor de no tempo , encontra-se o valor da indutância através da equação (1). = . (1) A maior dificuldade deste método é a forma de medir a corrente de maneira que não haja interferência no circuito. Outro inconveniente é o valor elevado de corrente do indutor. Por exemplo, em uma alimentação de 15, e um indutor a ser medido de 10 , a corrente com = 4 é de aproximadamente 6, o que torna inviável o circuito. O segundo circuito estudado é mostrado na figura 03: I VL Figura 03: Segundo circuito estudado No circuito da figura 03, é uma tensão senoidal operando com uma frequência pré-determinada conforme ao valor da indutância. O circuito funciona como um divisor de tensão e as formas de onda do circuito podem ser observados na figura 04. 15 Vpico V VL t Figura 04: Tensão de Entrada (linha contínua) e tensão no indutor (linha pontilhada) Sendo a tensão de pico de conhecida, mede-se a tensão sobre o indutor . O valor da reatância indutiva será função do valor da tensão sobre o indutor (eq. 2). = − (2) E por fim, a indutância pode ser conhecida através do valor da reatância indutiva (eq.3). = 1 = . − 2. . ! 2. . ! (3) Porem, para realizar medidas de escalas mais amplas de indutância, tanto a frequência quanto o valor da resistência em serie devem ser variadas consideravelmente. A tabela 01, pode ser resumido os valores aproximados de frequência e resistência para diversas faixas de indutância. 16 L f R 100µH 200KHz 125Ω 42Ω 1mH 100KHz 628Ω 410Ω 10mH 100KHz 6,28KΩ 4,4KΩ 100mH 100KHz 62KΩ 68KΩ 1H 100KHz 630KΩ 950KΩ Tabela 01: Faixas de indutância, com respectiva frequência de operação e resistência em serie. Conforme a tabela 01, para realizar as medições de indutância, é necessário variar muito a frequência e a resistência, e os circuitos que realizam todas essas alterações se tornaram complexos comparados com alternativas que acabaram por ser adotadas e estudadas a seguir. 17 3 PRINCÍPIO DE FUNCIONAMENTO DO CIRCUITO ADOTADO O circuito que, afinal, foi adotado, funciona como um circuito similar ao mostrado na figura 05. IL Vc Vo Figura 05: Circuito Oscilador LC com Schmitt Trigger. Este circuito é um oscilador e possibilita a obtenção da indutância L a partir de sua frequência de oscilação. O circuito da figura 05 utiliza uma porta CMOS AND Schmitt Trigger operando como inversor seus sinais característicos são apresentados na figura 06. As características básicas de um schmitt trigger é a histerese apresentada no funcionamento da porta lógica. Conforme mostrado na figura 06, a tensão de saída da porta lógica vai mudar de nível somente depois de ultrapassar uma tensão de histerese # . Portanto, à medida que vai crescendo, o nível de saída só vai alterar para zero assim que superar o valor de $ . E à medida que vai diminuindo, o nível de saída só vao alterar para nível alto assim que superar o valor de % 18 Vo Vc VH VN VP Figura 06: Curva x Vo Vcc t Vc VP VN t1 t2 t3 t4 t IL t Figura 07: Formas de Ondas características do circuito oscilador LC com Schmitt Trigger 19 Ao iniciar a operação, o capacitor 1 e o indutor 1 estão descarregados, portanto tanto quanto são zero. Como é zero, está em nível alto, ou seja, em . Nessas condições, o circuito trabalha como um circuito LC serie com uma fonte de alimentação CC como representado na figura 08. Durante o tempo & apresentado na figura 07, a corrente do indutor aumenta e tensão sobre o capacitor também cresce. Quando a tensão do capacitor atinge o valor de $ , que é a tensão de nível alto da histerese do schmitt trigger, o nível de saída do inversor passa ser baixo, portanto passa a ser zero. A partir desse ponto, o circuito trabalha como um circuito paralelo sem fonte de alimentação como é representado na figura 09. Durante o tempo , a corrente do indutor permanece no mesmo sentido, porem agora vai diminuindo, ou seja, descarregando no capacitor que permanece com a tensão crescendo. No fim do tempo , a corrente do indutor chega a zero, e a tensão sobre o capacitor está no valor máximo. Durante o tempo ' , o capacitor começa a descarga sobre o indutor, e a corrente começa a crescer no sentido oposto. Quando a tensão chegar ao nível de % , que é a tensão de nível baixo da histerese do schmitt trigger, o nível de saída do inversor passa a ser alto, e portanto, a tensão passa ser novamente . VCC VDC Figura 08: Circuito equivalente quando está em nível alto 20 Figura 09: Circuito Equivalente quando está em nível baixo Durante o tempo ' , a corrente do indutor começa a diminuir, mas mantem o mesmo sentido, descarregando sobre o capacitor que mantem por esse período a tensão em queda. Quando a corrente chegar a zero, o indutor passa a ser novamente carregado, fazendo com que a corrente cresça, e com isso o capacitor também será carregado, fazendo com que o cresça, iniciando o processo oscilatório novamente. 3.1 ANÁLISE TEÓRICA DO CIRCUITO LC Para descobrir qual a relação da frequência de com o valor do indutor 1, será realizada uma análise teórica deste circuito a seguir. Como inicio de análise, será realizado o equacionamento dos circuitos equivalentes do oscilador . No caso quando está em nível alto, o circuito equivalente foi visto na figura 08. Porem, para aproximar com um circuito real, vamos acrescentar uma resistência interna existente no indutor, como é mostrado na figura 10. VC VCC VDC Figura 10: Circuito equivalente quando está em nível alto com resistência interna do indutor 21 A resistência 1 representa a resistência interna do indutor. Conforme a lei de Kirchoff, a soma das tensões deve ser igual a zero. Portanto, podemos equacionar o circuito da figura 10: = & + & + )& (4) Substituindo os termos para ficar tudo em função da tensão sobre o capacitor : * () * () = () + . . + . . * * (5) Através da equação (5), é obtida a equação diferencial que descreve o comportamento da tensão sobre o capacitor do circuito da figura 10. * () * () 1 + . + . () = * * . . (6) () = % () + + () (7) A solução da equação diferencial (6) é dado por: Onde % é a resposta natural ou homogênea do sistema e + é a resposta forçada. Para essa equação diferencial de segunda ordem, a resposta homogênea é dada por: * () * () 1 + . + . () = 0 * * . (8) Onde a equação característica que resolve a equação homogênea é escrita por: , + 1 ., + =0 . (9) As raízes da equação característica são dadas por: 1 ,& = − + - . − 2. 2. . (10) 1 , = − − - . − 2. 2. . (11) 22 De acordo com as raízes da equação característica, a resposta pode ser superamortecida, ou seja raízes reais distintas, criticamente amortecida, raízes reais repetidas, ou subamortecida, raízes complexas conjugadas. Como no circuito estudado, a resistência é muito baixa por se tratar de uma resistência interna de um indutor, o circuito fica no terceiro caso, e com isso, a resposta total do sistema é dada por: () = / 0.1 . . sin(5. + 6) + (12) Onde as raízes da equação característica são dadas por: ,& = 7 + 8. 5 (13) , = 7 − 8. 5 (14) Os termos e 6 são adquiridos através das condições iniciais (0) e 9(0). A resposta forçada que no caso da eq.(12) é a constante , é a fonte de alimentação : do circuito ( ). Com a equação de (), é obtido a equação de 9() através da primeira derivada: 9() = . * () = . . /0.1 . (7. sin(5. + 6) + 5. cos(5. + 6)) * (15) Na figura 11 é apresentado o circuito equivalente com em nível baixo. VC Figura 11: Circuito equivalente quando está em nível baixo com resistência interna do indutor O equacionamento deste circuito é realizado de forma análoga ao caso anterior, mudando somente que no caso não existe resposta forçada, somente a resposta homogênea: 23 () = % () (16) Portanto, a equação que descreve a tensão do capacitor em função do tempo no circuito da figura 11 é dada por: () = / 0.1 . . sin(5. + 6) (17) A corrente do circuito 9() é dado pela equação (15). Com as equações encontradas, serão calculados os tempos que acontecerão as transições de . Primeiramente, para realizar o cálculo de forma numérica, definimos o valor do capacitor, da resistência e da tensão de alimentação. = 47>?, = 1Ω, = 15 (18) Através do datasheet da porta lógica CD4093 e com testes realizados com o circuito integrado utilizado, encontramos os valores de tensão de histerese característicos para uma tensão de alimentação de 15V: % = 8,10, $ = 10 (19) Para encontrar a equação que rege cada período de tempo de é necessário ter as condições iniciais. No entanto, as únicas condições iniciais que temos é que ao ligar o circuito, tanto a tensão sobre o capacitor quanto a corrente sobre o indutor serão zero. Portanto, as análises começarão com essas condições iniciais. Cada etapa de cálculo será realizada como uma interação, até que se perceba que os tempos de em nível alto e em nível baixo comecem a se repetir. Como o indutor é uma variável, será realizado para diversos valores de indutores para confirmação das equações finais. 24 3.2 CÁLCULO DA FUNÇÃO BC (D) COM E = F, GHI Com um indutor com o valor = 0,1 , são calculadas as raízes da equação característica pelas equações (10) e (11), resultando as seguintes raízes: ,& = −5000 + 8. 461238,50 (20) , = −5000 − 8. 461238,50 (21) A equação (12) será a resposta da tensão do capacitor no circuito da figura 10 no período em que fique em nível alto, ou seja, no instante que a tensão do capacitor atingir o nível de $ , a equação de vai mudar. Esse comportamento é chamado de & na figura 07. 3.2.1 PRIMEIRA INTERAÇÃO Na primeira interação, está em nível alto, ou seja, em KK, e assim o circuito é representado pela figura 10. A equação que representa a tensão no capacitor é apresentada na equação (22). () = / LMNNN.1 . . sin(461238,50. + 6) + 15 (22) As condições iniciais dessa interação são: (0) = 0, (0) = 0 (23) () = / LMNNN.1 . (−15). sin(461238,50. + 1,56) + 15 (24) Com as condições iniciais, os valores de K e 6 da equação: Essa equação gera a curva mostrada na figura 12, onde o tempo em que a tensão no capacitor chega a 10, que é o valor de $ , é = 2,682μ. 25 10 9 Tensão no Capacitor (Vc) 8 7 6 5 4 3 2 1 0 0 0.5 1 1.5 2 2.5 Tempo (t) x 10 -6 Figura 12: Tensão do Capacitor x Tempo – Primeira Interação (2,682μ) = / LMNNN.,PQRS . (−15). sin(461238,50.2,682μ + 1,56) + 15 (25) (2,682μ) = 10 (26) Através da equação (27), o comportamento da corrente no circuito é descrito por: 9() = . −15. / LMNNN.1 . (−5000. sin(461238,50. + 1,56) + 461238,50. cos(461238,50. + 1,56)) (27) Assim, o valor da corrente do circuito no fim do período é calculada: 9(2,682μ) = 47>?. −15. / LMNNN.,PQRS . (−5000. sin(461238,50.2,682μ + 1,56) + 461238,50. cos(461238,50.2,682μ + 1,56)) 9(2,682μ) = 303,16 A curva da corrente pelo tempo é apresentada na figura 13. (28) (29) 26 0.35 0.3 Corrente (I) 0.25 0.2 0.15 0.1 0.05 0 0 0.5 1 1.5 2 2.5 Tempo (t) x 10 -6 Figura 13: Corrente no Indutor x Tempo – Primeira Interação 3.2.2 SEGUNDA INTERAÇÃO Na segunda interação, está em nível baixo, ou seja, em zero, e assim o circuito é representado pela figura 11. A equação que representa a tensão no capacitor é apresentada na equação (30). () = / LMNNN.1 . . sin(461238,50. + 6) (30) E as condições iniciais utilizadas nessa nova interação serão as condições finais da interação anterior. Para facilitar os cálculos, o tempo será considerado novamente zero a partir desse ponto. Portanto, as condições iniciais dessa nova interação serão: (0) = 10, 9(0) = 303,16 (31) Com essas condições iniciais, é adquirido a equação que rege esse período do circuito: () = / LMNNN.1 . 17,28. sin(461238,50. + 0,62) (32) E assim é possível traçar o gráfico de em função do tempo, visto na figura 14, até que a tensão do capacitor chegue ao valor de % , onde assim a tensão volte a ter nível alto, e novamente o circuito muda de comportamento. 27 18 17 Tensão no Capacitor (Vc) 16 15 14 13 12 11 10 9 8 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 x 10 -6 Figura 14 – Tensão no Capacitor ( ) x Tempo () – Segunda Interação Onde o tempo em que a tensão no capacitor chega a 8,10V, que é o valor de % , é = 4,38μ. (4,38μ) = / LMNNN.T,'QRS . (17,28). sin(461238,50.4,38μ + 0,62) (33) (4,38μ) = 8,12 (34) E a corrente do circuito pela equação (15) nesse tempo é dado por: 9(4,38μ) = 47>?. 17,28. / LMNNN.T,'QRS . (−5000. sin(461238,50.4,38μ + 0,62) + 461238,50. cos(461238,50.4,38μ + 0,62)) 9(4,38μ) = −323,28 (35) (36) 28 0.4 0.3 0.2 Corrente (I) 0.1 0 -0.1 -0.2 -0.3 -0.4 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 x 10 -6 Figura 15: Corrente no Indutor x Tempo – Segunda Interação 3.2.3 TERCEIRA INTERAÇÃO Na terceira interação, está em nível alto, ou seja, em KK, e assim o circuito é representado pela figura 10. A equação que representa a tensão no capacitor é apresentada na equação (37). () = / LMNNN.1 . . sin(461238,50. + 6) + 15 (37) As condições iniciais dessa interação são: (0) = 8,12, (0) = −323,28 (38) () = / LMNNN.1 . (−16,49). sin(461238,50. + 0,43) + 15 (39) Com as condições iniciais, os valores de e 6 da equação: Essa equação gera a curva mostrada na figura 16, aonde o tempo em que a tensão no capacitor chega a 10, que é o valor de $ , é = 5,19μ. 29 10 Tensão no Capacitor (Vc) 8 6 4 2 0 -2 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 5 x 10 -6 Figura 16 – Tensão no Capacitor ( ) x Tempo () – Terceira Interação (5,19μ) = / LMNNN.M,&VRS . (−16,49). sin(461238,50.5,19μ + 0,43) + 15 (40) (5,19μ) = 10 (41) Através da equação (15), o comportamento da corrente no circuito é descrito por: 9() = . −16,49. / LMNNN.1 . (−5000. sin(461238,50. + 0,43) + 461238,50. cos(461238,50. + 0,43)) (42) Assim, o valor da corrente do circuito no fim do período é calculado: 9(5,19μ) = 47>?. −16,49. / LMNNN.M,&VRS . (−5000. sin(461238,50.5,19μ + 0,43) + 461238,50. cos(461238,50.5,19μ + 0,43)) 9(5,19μ) = 332,06 A curva da corrente pelo tempo é apresentada na figura 17. (43) (44) 30 0.4 0.3 0.2 Corrente (I) 0.1 0 -0.1 -0.2 -0.3 -0.4 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 5 x 10 -6 Figura 17: Corrente no Indutor x Tempo – Terceira Interação 3.2.4 QUARTA INTERAÇÃO Na quarta interação, está em nível baixo, ou seja, em zero, e assim o circuito é representado pela figura 11. A equação que representa a tensão no capacitor é apresentada na equação (45). () = / LMNNN.1 . . sin(461238,50. + 6) (45) E as condições iniciais utilizadas nessa nova interação serão as condições finais da interação anterior. Para facilitar os cálculos, o tempo será considerado novamente zero a partir desse ponto. Portanto, as condições iniciais dessa nova interação serão: (0) = 10, 9(0) = 332,06 (46) Com essas condições iniciais, é adquirida a equação que rege esse período do circuito: () = / LMNNN.1 . 18,38. sin(461238,50. + 0,57) (47) E assim é possível traçar o gráfico de em função do tempo, visto na figura 18, até que a tensão do capacitor chegue ao valor de % , onde assim a tensão volte a ter nível alto, e novamente o circuito muda de comportamento. 31 20 Tensão no Capacitor (Vc) 18 16 14 12 10 8 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 x 10 -6 Figura 18 – Tensão no Capacitor ( ) x Tempo () – Quarta Interação Aonde o tempo em que a tensão no capacitor chega a 8,10V, que é o valor de % , é = 4,56μ. (4,56μ) = / LMNNN.T,MPRS . (18,38). sin(461238,50.4,56μ + 0,57) (47) (4,56μ) = 8,12 (48) E a corrente do circuito pela equação (15) nesse tempo é: 9(4,56μ) = 47>?. 18,38. / LMNNN.T,MPRS . (−5000. sin(461238,50.4,56μ + 0,57) + 461238,50. cos(461238,50.4,56μ + 0,57)) 9(4,56μ) = −349,43 (49) (50) 32 0.4 0.3 0.2 Corrente (I) 0.1 0 -0.1 -0.2 -0.3 -0.4 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 x 10 -6 Figura 19: Corrente no Indutor x Tempo – Quarta Interação 3.2.5 QUINTA INTERAÇÃO Na quinta interação, está em nível alto, ou seja, em KK, e assim o circuito é representado pela figura 10. A equação que representa a tensão no capacitor é apresentada na equação (51). () = / LMNNN.1 . . sin(461238,50. + 6) + 15 (51) As condições iniciais dessa interação são: (0) = 8,12, (0) = −349,43 (52) () = / LMNNN.1 . (−17,59). sin(461238,50. + 0,40) + 15 (53) Com as condições iniciais, os valores de e 6 da equação: Essa equação gera a curva mostrada na figura 20, aonde o tempo em que a tensão no capacitor chega a 10, que é o valor de $ , é = 5,30μ. 33 10 Tensão no Capacitor (Vc) 8 6 4 2 0 -2 -4 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 Tempo (t) 5 x 10 -6 Figura 20 – Tensão no Capacitor ( ) x Tempo () – Quinta Interação (5,30μ) = / LMNNN.M,'NRS . (−17,59). sin(461238,50.5,30μ + 0,40) + 15 (54) (5,30μ) = 10 (55) Através da equação (15), o comportamento da corrente no circuito é descrito por: 9() = . −17,59. / LMNNN.1 . (−5000. sin(461238,50. + 0,40) + 461238,50. cos(461238,50. + 0,40)) (56) Assim, o valor da corrente do circuito no fim do período é calculado: 9(5,30μ) = 47>?. −17,59. / LMNNN.M,'NRS . (−5000. sin(461238,50.5,30μ + 0,40) + 461238,50. cos(461238,50.5,30μ + 0,40)) 9(5,30μ) = 356,26 A curva da corrente pelo tempo é apresentada na figura 21. (57) (58) 34 0.4 0.3 0.2 Corrente (I) 0.1 0 -0.1 -0.2 -0.3 -0.4 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 5 x 10 -6 Figura 21: Corrente no Indutor x Tempo – Quinta Interação 3.2.6 SEXTA INTERAÇÃO Na sexta interação, está em nível baixo, ou seja, em zero, e assim o circuito é representado pela figura 11. A equação que representa a tensão no capacitor é apresentada na equação (58). () = / LMNNN.1 . . sin(461238,50. + 6) (58) E as condições iniciais utilizadas nessa nova interação serão as condições finais da interação anterior. Para facilitar os cálculos, o tempo será considerado novamente zero a partir desse ponto. Portanto, as condições iniciais dessa nova interação serão: (0) = 10, 9(0) = 356,26 (59) Com essas condições iniciais, é adquirida a equação que rege esse período do circuito: () = / LMNNN.1 . 19,33. sin(461238,50. + 0,54) (60) E assim é possível traçar o gráfico de em função do tempo, visto na figura 22, até que a tensão do capacitor chegue ao valor de % , onde assim a tensão volte a ter nível alto, e novamente o circuito muda de comportamento. 35 20 Tensão no Capacitor (Vc) 18 16 14 12 10 8 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 x 10 -6 Figura 22 – Tensão no Capacitor ( ) x Tempo () – Sexta Interação Aonde o tempo em que a tensão no capacitor chega a 8,10, que é o valor de % , é = 4,68μ. (4,68μ) = / LMNNN.T,PQRS . (19,33). sin(461238,50.4,68μ + 0,54) (61) (4,68μ) = 8,12 (62) E a corrente do circuito pela equação (15) nesse tempo é: 9(4,68μ) = 47>?. 19,33. / LMNNN.T,PQRS . (−5000. sin(461238,50.4,68μ + 0,54) + 461238,50. cos(461238,50.4,68μ + 0,54)) 9(4,68μ) = −371,74 (63) (64) 36 0.4 0.3 0.2 Corrente (I) 0.1 0 -0.1 -0.2 -0.3 -0.4 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 x 10 -6 Figura 23: Corrente no Indutor x Tempo – Sexta Interação 3.2.7 SÉTIMA INTERAÇÃO Na sétima interação, está em nível alto, ou seja, em KK, e assim o circuito é representado pela figura 10. A equação que representa a tensão no capacitor é apresentada na equação (65). () = / LMNNN.1 . . sin(461238,50. + 6) + 15 (65) As condições iniciais dessa interação são: (0) = 8,12, (0) = −371,74 (66) () = / LMNNN.1 . (−18,55). sin(461238,50. + 0,38) + 15 (67) Com as condições iniciais, os valores de e 6 da equação: Essa equação gera a curva mostrada na figura 24, aonde o tempo em que a tensão no capacitor chega a 10, que é o valor de $ , é = 5,38μ. 37 12 10 Tensão do Capacitor (Vc) 8 6 4 2 0 -2 -4 0 0.5 1 1.5 2 2.5 3 Tempo (t) 3.5 4 4.5 5 x 10 -6 Figura 24 – Tensão no Capacitor ( ) x Tempo () – Sétima Interação (5,38μ) = / LMNNN.M,'QRS . (−18,55). sin(461238,50.5,38μ + 0,38) + 15 (68) (5,38μ) = 10 (69) Através da equação (15), o comportamento da corrente no circuito é descrito por: 9() = . −18,55. / LMNNN.1 . (−5000. sin(461238,50. + 0,38) + 461238,50. cos(461238,50. + 0,38)) (70) Assim, o valor da corrente do circuito no fim do período é calculado: 9(5,38μ) = 47>?. −18,55. / LMNNN.M,'QRS . (−5000. sin(461238,50.5,38μ + 0,38) + 461238,50. cos(461238,50.5,38μ + 0,38)) 9(5,38μ) = 377,37 A curva da corrente pelo tempo é apresentada na figura 25. (71) (72) 38 0.4 0.3 0.2 Corrente (I) 0.1 0 -0.1 -0.2 -0.3 -0.4 0 0.5 1 1.5 2 2.5 3 Tempo (t) 3.5 4 4.5 5 x 10 -6 Figura 25: Corrente no Indutor x Tempo – Sétima Interação 3.2.8 OITAVA INTERAÇÃO Na oitava interação, está em nível baixo, ou seja, em zero, e assim o circuito é representado pela figura 11. A equação que representa a tensão no capacitor é apresentada na equação (72). () = / LMNNN.1 . . sin(461238,50. + 6) (72) E as condições iniciais utilizadas nessa nova interação serão as condições finais da interação anterior. Para facilitar os cálculos, o tempo será considerado novamente zero a partir desse ponto. Portanto, as condições iniciais dessa nova interação serão: (0) = 10, 9(0) = 377,37 (73) Com essas condições iniciais, é adquirida a equação que rege esse período do circuito: () = / LMNNN.1 . 20,17. sin(461238,50. + 0,52) (74) E assim é possível traçar o gráfico de em função do tempo, visto na figura 26, até que a tensão do capacitor chegue ao valor de % , onde assim a tensão volte a ter nível alto, e novamente o circuito muda de comportamento. 39 20 Tensão no Capacitor (Vc) 18 16 14 12 10 8 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 x 10 -6 Figura 26 – Tensão no Capacitor ( ) x Tempo () – Oitava Interação Aonde o tempo em que a tensão no capacitor chega a 8,10, que é o valor de % , é = 4,76μ. (4,76μ) = / LMNNN.T,WPRS . (20,17). sin(461238,50.4,76μ + 0,52) (75) (4,76μ) = 8,12 (76) E a corrente do circuito pela equação (15) nesse tempo é: 9(4,76μ) = 47>?. 20,17. / LMNNN.T,WPRS . (−5000. sin(461238,50.4,76μ + 0,52) + 461238,50. cos(461238,50.4,76μ + 0,52)) 9(4,76μ) = −390,70 (77) (78) 40 0.4 0.3 0.2 Corrente (I) 0.1 0 -0.1 -0.2 -0.3 -0.4 0 0.5 1 1.5 2 2.5 Tempo (t) 3 3.5 4 4.5 x 10 -6 Figura 27: Corrente no Indutor x Tempo – Oitava Interação Portanto, após a oitava interação, o tempo de em nível baixo será de 4,76 μ e o tempo de em nível alto será de 5,38 μ. A frequência do sinal é dada por: != 1 1 = = 98619 Y X 10,14μ (79) 3.3 CÁLCULO DA FUNÇÃO BC (D) COM E = GHI De forma análoga ao item 3.2, foi calculada a frequência de saída do circuito oscilador, agora com um indutor de 1 . Primeiramente foram calculadas as raízes da equação característica pelas equações (10) e (11). ,& = −500 + 8. 145864,13 (80) , = −500 − 8. 145864,13 (81) () = / LMNN.1 . . sin(145864,13. + 6) + 15 (82) A equação (82) determina a característica do circuito quando está em nível alto. 41 E a equação (83) determina a característica do circuito quando está em nível baixo. () = / LMNN.1 . . sin(145864,13. + 6) (83) Com essas equações e realizando interações como no caso anterior, é obtido o valor da frequência da onda retangular de . != 1 1 = = 30945 Y X 32,3μ (84) 3.4 CÁLCULO DA FUNÇÃO BC (D) COM E = GFHI De forma análoga ao item 3.2, foi calculada a frequência de saída do circuito oscilador, agora com um indutor de 10 . Primeiramente são calculadas as raízes da equação características pelas equações (10) e (11). ,& = −50 + 8. 46126,53 (85) , = −50 − 8. 46126,53 (86) () = / LMN.1 . . sin(46126,53. + 6) + 15 (87) A equação (87) determina a característica do circuito quando está em nível alto. E a equação (88) determina a característica do circuito quando está em nível baixo. () = / LMN.1 . . sin(46126,53. + 6) (88) Com essas equações e realizando interações como no caso anterior, é obtido o valor da frequência da onda retangular de . != 1 1 = = 9743 Y X 102,64μ (89) 42 3.5 CÁLCULO DA FUNÇÃO BC (D) COM E = ZFHI De forma análoga ao item 3.2, foi calculada a frequência de saída do circuito oscilador, agora com um indutor de 50 . Primeiramente foram calculadas as raízes da equação característica pelas equações (10) e (11). ,& = −10 + 8. 20628,42 (90) , = −10 − 8. 20628,42 (91) () = / L&N.1 . . sin(20628,42. + 6) + 15 (92) A equação (92) determina a característica do circuito quando está em nível alto. E a equação (93) determina a característica do circuito quando está em nível baixo. () = / L&N.1 . . sin(20628,42. + 6) (93) Com essas equações e realizando interações como no caso anterior, é obtido o valor da frequência da onda retangular de . != 1 1 = = 4355 Y X 229.6μ (94) 3.6 CÁLCULO DA RESPOSTA DE FREQUÊNCIA DO CIRCUITO OSCILADOR A partir dos resultados obtidos anteriormente, conclui-se que a frequência de oscilação do circuito da figura 05 é dada aproximadamente por: ! ≅ 0,21 1 √. (95) Na tabela é apresentada uma comparação do valor teórico da frequência com o valor calculado com a equação de aproximação. 43 L 0,1mH 1mH 10mH 50mH F (valor teórico) 98618 Hz 30945 Hz 9743 Hz 4355 Hz 96870 Hz 30630 Hz 9687 Hz 4332 Hz 1,77% 1,02% 0,57% 0,53% 0,21 1 √. Erro Tabela 02: Comparação dos valores de frequência A conclusão importante de todo esse estudo é que: , 1 ! (96) = ! (97) Ou seja: Onde o K poderá ser ajustado para reduzir ao máximo o erro na hora da medição, como será tratado mais a frente. 44 4 PROJETO DA PARTE ANALÓGICA Na figura 28 está apresentado o circuito completo da parte analógica do projeto. Vc Vo 2 8 7 3 1 Figura 28: Circuito Completo da Parte Analógico Vf Vai para o pino 12 do microcontrolador AT89S52 45 4.1 FONTE DE ALIMENTAÇÃO O Primeiro a ser descrito é a fonte de alimentação que gera as tensões KK e **. O circuito da fonte de alimentação está apresentado na figura 29. Vac Figura 29: Fonte de Alimentação Foi utilizado duas alimentações no circuito pelo fato que para a tensão de histerese da porta lógica com schmitt trigger ser maior, é necessário utilizar uma tensão mais alta. A tensão mais alta que se pode usar neste circuito integrado CMOS é 15, que se tornou a alimentação . Para alimentar o circuito digital do microcontrolador e LCD, é necessário uma alimentação de 5, que é a alimentação de ]] . 4.2 OSCILADOR LC A primeira parte do circuito analógico apresentado na figura 30 é o circuito oscilador LC. Seu estudo detalhado já foi feito no capítulo anterior. Serão agora definidos os componentes utilizados nesse circuito. O primeiro componente é o indutor & . Trata-se justamente da variável do sistema. O indutor que se deseja medir será inserido ao circuito. Devido as características do circuito, os indutores suportados para medição são da faixa de 0,1mH até 400mH. 46 O segundo componente é o capacitor & . É o componente que vai trabalhar com o indutor para gerar a frequência de oscilação. Como será trabalhado com indutâncias na faixa de 0,1mH até 400mH, deve-se colocar no circuito um capacitor que gere frequências de no máximo alguns quilohertz. Frequências muito altas propiciam a interferências externas ou por capacitâncias parasitas, e por isso serão evitadas nesse projeto. Pelas análises teóricas realizadas no capítulo anterior, o capacitor que se adequou a essas características possui o valor de 47nF. 4.3 BUFFER A corrente exigida para alimentar o circuito LC é elevada para os padrões de uma porta lógica CMOS. Para resolver esse problema, foi inserido ao circuito um sistema de buffer de corrente com dois transistores Q1 e Q2 indicado na figura 30. Para os menores valores de indutância medidos pelo circuito, a corrente máxima de pico pode alcançar valores de 400mA como mostrado na equação (78). Os transistores utilizados foram o BC548 e BC 558 que segundo o datasheet, possuem ganhos na faixa de 150. Com isso, a corrente exigida da porta lógica fica próximo a 2,5mA, aceitável para um CMOS. 4.4 REDUTOR DE TENSÃO A tensão mostrado na figura 28 é um sinal retangular com tensão máxima de 15. Esse sinal será lido pelo microcontrolador, porem, deve ser com tensão máxima de 5. Por isso a utilização do comparador U2A alimentado por 5, gerando o sinal ^ que possui a mesma frequência de porem com a amplitude de 5. A tensão de referencia aplicado ao pino 3 do comparador U2A é ajustada pelo divisor de tensão entre os resistores R1 e R2. Essa tensão de referencia foi ajustada para 3. 47 O comparador utilizado foi o LM311. Para a tensão de referencia, foi utilizado um trimpot de 10_Ω que foi ajustado para 1 = 4Ω e 2 = 6Ω. O resistor 3 é um resistor de pull up com valor de 10_Ω. 48 5 PROJETO DA PARTE DIGITAL O microcontrolador utilizado foi o AT89S52 da Atmel que foi escolhido por muitas experiências em projetos anteriores. VDD VDD Vc 10uF Vai para o pino 7 do comparador LM311 1K5 Vf AT89S52 27pF 10K 12MHz Display Dados Comunicação com o PC Display RS Display RW Display EN 27pF Figura 30: Circuito Digital Outra grande facilidade é a simplicidade da plataforma de gravação deste componente. É necessário somente ligar os pinos MOSI, MISO, SCK e RST à porta paralela LPT1 de um micro computador, e realizar a conversação e gravação deste componente. O diagrama de gravação pode ser visto na figura 31: Figura 31: Circuito de Gravação do AT89S52 49 Com o microcontrolador conectado ao PC, pode ser utilizado o programa In System Programming Software do fabricante AEC Electronics para realizar a gravação do programa na memória do AT89S52. 5.1 PLATAFORMA DE PROGRAMAÇÃO E COMPILAÇÃO Para realizar a programação foi utilizada a linguagem Assembly, mais comum na família dos microcontrolador 8051. O programa foi escrito e compilado no software µvision v3 fabricado pela Keil Elektronik GmbH. 50 5.2 FLUXOGRAMA DE OPERAÇÃO INICIO NÃO Vf Atingiu 100 pulsos? INTERRUPÇÃO BORDA SUBIDA Vf SIM Pausa Timer Desliga Interrupção Timer Ligado? SIM NÃO Liga Timer Conta 1 pulso de Vf Verifica valor de Ntimer Insere valor de L no display Zera Timer Liga Interrupção Figura 32: Fluxograma de operação do programa Ao iniciar o programa, primeiramente serão carregadas todas as informações internas como configurações de temporizadores, interrupções e ports de saída. Também serão feitas as configurações do display LCD. Passando essas rotinas básicas, o microcontrolador ficará constantemente verificando se a contagem de pulsos da oscilação gerada pelo circuito LC (^ ) chegou a 100. Durante essa 51 varredura, interrupções vão acontecendo a cada borda de subida da onda retangular do circuito LC (^ ). Na primeira interrupção, o timer (`abcde ) é ligado e a cada interrupção que acontece, o microcontrolador conta que ocorreu um pulso. Chegando a 100 pulsos de ^ , o timer é pausado e as interrupções são desligadas para que ocorra o processamento dos dados sem cortes. Como o clock do microcontrolador é de 12f Y, podemos saber quanto tempo equivale cada incremento do temporizador. Primeiro, o período do pulso do clock Xghigj pode ser calculado da seguinte forma: Xghigj = 1 !ghigj = 1 = 83,33> 12f Y (98) O tempo 1bcde e cada incremento do contador do AT89S52 equivale a uma instrução, e cada instrução é executada com 12 pulsos de clock, ou seja: 1bcde = Xghigj . 12 = 83,33>. 12 = 1k (99) O programa conta quantos pulsos de 1k (1bcde ) ocorrem em 100 pulsos do oscilador da figura 05. O resultado é chamado `1bcde e portanto vale: `1bcde = X. 100 √. = . 10Q 1k 0,21 (100) Então: (0,21) . . (10Q ) (101) (0,21) . = (`1bcde ) . 9,38. 10L&& 47. 10LV . (10Q ) (102) = (`1bcde ) E para = 47>? tem-se: = (`1bcde ) 52 Por essa equação apresentada, o valor da indutância se dá em Henry (H). Como a amostragem do display se dará em miliHenry (mH) e mais um dígito significativo, devemos multiplicar a equação por 10T . = (`1bcde ) . 9,38. 10LW (103) Na figura 33 é apresentado o gráfico da indutância em função do número de contagem do timer. 0.45 0.4 0.35 Indutância (H) 0.3 0.25 0.2 0.15 0.1 0.05 0 0 1 2 3 4 5 Ntimer 6 x 10 4 Figura 33: Indutância x Contagem do Timer Para linearizar o sistema, podemos separar a equação em duas partes: = `1bcde . `1bcde . 9,38. 10LW (104) Definindo de acordo com a equação (105): = 1 1066098 = LW `1bcde . 9,38. 10 `1bcde A indutância fica de acordo com a equação (106): (105) = 53 `1bcde (106) É dividida a equação (103) em duas partes por dois motivos. Primeiro, por se tratar de um microcontrolador de 8 bits, não seria possível realizar operações matemáticas com números tão grandes. Segundo, os valores de são previamente calculados para todos os valores de `abcde e salvos em uma tabela interna na memória do microcontrolador. O valor de `abcde contem 16 bits, porem por motivo de simplificação, utilizou-se somente os 8 bits mais significativos para criar a tabela do , apresentada no tabela 3. Assim sendo, o microcontrolador irá buscar o valor de correspondente ao valor do `abcde lido. Por exemplo, se o valor de `abcde lido é de 31812*, seu correspondente em hexadecimal é 744ℎ. Portanto, os oito bits mais significativos são 7ℎ, que formaria o número em decimal 31744*. Verificando a tabela 3, o utilizado será 33 (linha 7, coluna C). Neste mesmo exemplo, o valor de indutância L conforme a equação (106) será 935. Como 4 bits mais significativos do Ntimer (hexadecimal) esse valor está em Henry x 10LT (. 10LT ), o valor apresentado no display será de 93,5 0 1 2 3 4 5 6 7 8 9 A B C D E F 0 4164 245 126 85 64 51 43 37 32 29 26 24 22 20 19 17 1 2082 231 122 83 63 51 42 37 32 29 26 23 21 20 18 17 2 1388 219 119 82 62 50 42 36 32 28 26 23 21 20 18 17 3 1041 208 116 80 61 50 42 36 32 28 25 23 21 20 18 17 4 833 198 113 79 60 49 41 36 31 28 25 23 21 20 18 17 5 694 189 110 77 59 48 41 35 31 28 25 23 21 19 18 17 6 595 181 107 76 59 48 40 35 31 28 25 23 21 19 18 17 7 521 174 104 74 58 47 40 35 31 27 25 23 21 19 18 17 8 463 167 102 73 57 47 40 34 30 27 25 23 21 19 18 17 9 416 160 99 72 56 46 39 34 30 27 24 22 21 19 18 17 Tabela 03: Tabela do A 379 154 97 71 56 46 39 34 30 27 24 22 21 19 18 17 B 347 149 95 69 55 45 39 34 30 27 24 22 20 19 18 17 C 320 144 93 68 54 45 38 33 30 27 24 22 20 19 18 16 D 297 139 91 67 53 44 38 33 29 26 24 22 20 19 17 16 E 278 134 89 66 53 44 38 33 29 26 24 22 20 19 17 16 5.3 DESCRIÇÃO DO PROGRAMA Na sequencia, será descrito completamente o programa na linguagem Assembler. Antes de tudo, foram definidas as variáveis que serão utilizadas no programa: . F 260 130 87 65 52 43 37 33 29 26 24 22 20 19 17 16 54 TEMPO EQU 0D LCD EQU P2 D0 EQU P2.0 D1 EQU P2.1 D2 EQU P2.2 D3 EQU P2.3 D4 EQU P2.4 D5 EQU P2.5 D6 EQU P2.6 D7 EQU P2.7 EN EQU P0.2 RW EQU P0.1 RS EQU P0.0 VARA EQU 0F0AH VARB EQU 0F0BH VARC EQU 0F0CH VARD EQU 0F0DH Em sequencia, o início do programa e as respectivas faixas de memória onde o programa vai prosseguir, no caso das interrupções. PRE_START: ORG 0000H JMP START ORG 0003H JMP INTER RETI A seguir vêm as configurações internas do AT89S52. Nessas instruções foram configuradas as interrupções e os timers. Foi habilitada a interrupção externa 0 sendo usada em borda de subida e é nesse ponto que o sinal do oscilador LC é aplicado. Foram configurados também os timers 0 e 1 para trabalhar com 16 bits. O timer 0 é utilizado como opção de algum atraso necessário durante o programa e o timer 1 é o contador usado para medir o período dos pulsos do oscilador LC. ORG 0040H START: MOV IE,#80H MOV IP,#01H MOV TCON,#01H MOV TMOD,#11H CLR C Ainda em configurações, só que agora, são as configurações do display de LCD. A primeira instrução LCALL CHECK é uma rotina criada para verificar se o display está pronto para receber as informações que serão enviadas a seguir. Essa rotina lê um bit gerado pelo 55 LCD indicando quando está pronto. Essa rotina evita erros de informações entre microcontroldor e LCD. Será executada sempre quando houver essas trocas de informações. A primeira instrução enviada ao LCD habilita o funcionamento em 8 bits, compatível com o AT89S52 e habilita o funcionamento das duas linhas. Em sequencia ele é configurado para trabalhar com incremento de memória e sem correr os valores pelo display. Depois é ligado o display e desabilitado o cursor piscante. E por último, todos os valores de memória são zerados e coloca-se o cursor na primeira posição, aguardando o primeiro caractere. LCALL CHECK CLR EN CLR RW CLR RS MOV LCD, #38H SETB EN LCALL CHECK CLR EN CLR RW CLR RS MOV LCD, #06H SETB EN LCALL CHECK CLR EN CLR RW CLR RS MOV LCD, #0CH SETB EN LCALL CHECK CLR EN CLR RW CLR RS MOV LCD, #01H SETB EN LCALL CHECK Logo após as configurações do microcontrolador e do display, aparece uma mensagem inicial no LCD. WRITE_STR: MOV R0, #7D MOV DPTR, #0500H LCALL WRITE_NOW WRITE_STR2: MOV LCD, #0C0H SETB EN LCALL CHECK MOV R0, #7D MOV DPTR, #0510H LCALL WRITE_NOW LCALL TIMER LCALL CLEAR 56 Após a mensagem inicial, são inseridos os textos contínuos de funcionamento durante as medições. É escrito a palavra INDUTANCIA na primeira linha, e no final da segunda linha é inserido a unidade de medida assim como o ponto divisor das casas decimais como apresentado na figura 34. Figura 34: Display de LCD WRITE_STR3: MOV IE,#80H MOV IP,#01H MOV TCON,#01H MOV TMOD,#11H LCALL TIMER MOV R1,#00H MOV R2,#00H CLR C LCALL CHECK MOV R0, #10D MOV DPTR, #0520H LCALL WRITE_NOW WRITE_STR4: MOV LCD, #0CEH SETB EN LCALL CHECK MOV R0, #2D MOV DPTR, #0540H LCALL WRITE_NOW MOV LCD, #0CCH SETB EN LCALL CHECK MOV A,#2EH LCALL WRITE_LCD Depois, são inseridos os valores iniciais nos registradores. Os registradores R2 ao R5 iniciam com o valor de #30 , pois se trata do caractere ‘0’ que será inserido no display. À medida que esse valor é incrementado, o caractere também é incrementado até #39 que representa o caractere ‘9’. O registrador R2 representa o dígito menos significativo enquanto o registrador R5 representa o dígito mais significativo. 57 O registrador R1 é responsável por incrementar a cada pedido de interrupção, ou seja, esse registrador armazena a contagem atual até chegar ao centésimo ciclo do oscilador. Já os registradores R6 e R7 são os responsáveis por armazenar os 16 bits da contagem do timer 1. ZERAR: MOV R1,#00H MOV R2,#30H MOV R3,#30H MOV R4,#30H MOV R5,#30H MOV R6,#00H MOV R7,#00H MOV VARA,#38D MOV VARB,#0FFH MOV VARC,#03H JMP TESTE A próxima é a rotina de teste, no qual fica aguardando quando ocorre alguma interrupção e direciona para escrever o valor numérico no display assim que passar os cem ciclos do oscilador LC. TESTE: SETB EX0 JC WRITE_STR5 DJNZ VARB,TESTE MOV VARB,#0FFH JMP ESCREVE JMP TESTE Em seguida vem a parte do programa que converte o valor do tempo de cem ciclos do oscilador em um valor numérico equivalente à indutância em miliHenry. O registrador R7 representa os oito bits mais significativos do timer 1 enquanto o registrador R6 representa os oito bits menos significativos do timer 1. O registrador B representa o valor da tabela de correspondente ao valor da medida. Assim sendo, os registradores R2 ao R5 serão incrementados até o valor da indutância que representa. WRITE_STR5: MOV VARA,B K01: DJNZ R6,J01 DJNZ R7,J02 JMP ESCREVE J02: MOV R6,#0FFH 58 JMP K01 J01: DJNZ VARA,K01 MOV VARA,B INC R2 CJNE R2,#3AH,K01 MOV R2,#30H INC R3 CJNE R3,#3AH,K01 MOV R3,#30H INC R4 CJNE R4,#3AH,K01 MOV R4,#30H INC R5 CJNE R5,#3AH,K01 MOV R5,#30H ;JMP K01 LCALL WRITE_STR6 JMP TESTE A próxima rotina é responsável por escrever os valores dos registradores R2, R3, R4 e R5 no LCD. Os valores contidos nessas memórias já serão caracteres numéricos que deixará então o LCD completo com o valor do indutor medido. ESCREVE: MOV LCD, #0C9H SETB EN LCALL CHECK MOV A,R5 LCALL WRITE_LCD MOV A,R4 LCALL WRITE_LCD MOV A,R3 LCALL WRITE_LCD MOV LCD, #0CDH SETB EN LCALL CHECK MOV A,R2 LCALL WRITE_LCD JMP WRITE_STR3 Figura 35: Exemplo de Medição no Display de LCD 59 Na sequencia, é mostrada a rotina de interrupção, que é responsável por ligar o timer 1 e desliga-lo após 100 ciclos do oscilador LC. É nessa rotina que os valores do timer são inseridos nos registradores R6 e R7. INTER: SETB TR1 INC R1 CJNE R1,#100D,CONT CLR TR1 CLR EX0 SETB C MOV R1,#00H MOV R6,TL1 MOV R7,TH1 MOV A,TH1 LCALL DADOS MOV TL1,#00H MOV TH1,#00H CONT: RETI Na sequencia têm uma serie de rotinas utilizadas para diversas funções no programa. A primeira é a rotina WRITE_NOW que tem por função organizar caracteres de textos que serão escritos no LCD. A rotina CLEAR é usada para apagar todos os caracteres do display de LCD. A rotina WRITE_STR6 é usada para escrever no display uma mensagem quando a medição ultrapassar a medida máxima do instrumento, que está na faixa de 400mH. A rotina DADOS que tem por finalidade buscar na tabela de correção o valor correspondente da constante de linearização e inserir no registrador B. A próxima é a rotina do timer 0 responsável por gerar um atraso quando necessário. Existe também a rotina CHECK, que como explicado anteriormente, é usada para verificar se o LCD está pronto para receber informação do microcontrolador. E por último a rotina WRITE_LCD, que é usado para enviar cada caractere para o LCD. ORG 0200H WRITE_NOW: CLR A MOVC A, @A + DPTR LCALL WRITE_LCD INC DPTR DJNZ R0, WRITE_NOW CLR EN CLR RS CLR RW 60 RET CLEAR: CLR EN CLR RW CLR RS MOV LCD, #01H SETB EN LCALL CHECK RET WRITE_STR6: LCALL CHECK MOV LCD, #0C2H SETB EN LCALL CHECK MOV R0, #9D MOV DPTR, #0560H LCALL WRITE_NOW RET DADOS: MOV DPTR,#0600H MOVC A, @A + DPTR MOV B,A RET TIMER: MOV R1, #20D TIMER2: MOV TL0, #LOW(TEMPO) MOV TH0, #HIGH(TEMPO) SETB TR0 JNB TF0, $ CLR TR0 CLR TF0 DJNZ R1, TIMER2 RET CHECK: CLR EN CLR RS SETB RW MOV LCD, #0FFH SETB EN JB D7, CHECK CLR EN CLR RW RET WRITE_LCD: CLR EN CLR RW SETB RS MOV LCD, A SETB EN LCALL CHECK RET E por último no programa temos os dados internos de memória. Aqui constam as informações que serão escritas no LCD assim como a tabela de calibração do instrumento. 61 Depois da posição 600H de memória está a tabela de calibração que consta com 256 valores, que ligam o valor medido do tempo com um valor de constante de linearização . INTERNAL_DATA: ORG 0500H DB 'LEANDRO' ORG 0510H DB 'QUINTAO' ORG 0520H DB 'INDUTANCIA' ORG 0540H DB 'mH' ORG 0560H DB '> QUE 400' ORG 0600H DB 255D, 255D, 255D, 255D, 255D, 255D, 255D, 255D, 249D, 219D, 183D, 160D, 125D, 110D, 109D, 108D DB 107D, 106D, 105D, 104D, 103D, 102D, 101D, 100D, 99D, 98D, 97D, 96D, 95D, 94D, 93D, 92D DB 91D, 88D, 86D, 84D, 81D, 79D, 77D, 75D, 73D, 72D, 70D, 68D, 67D, 65D, 64D, 63D DB 61D, 60D, 59D, 58D, 57D, 56D, 55D, 54D, 53D, 52D, 51D, 50D, 49D, 49D, 48D, 47D DB 46D, 46D, 45D, 44D, 44D, 43D, 42D, 42D, 41D, 41D, 40D, 40D, 39D, 39D, 38D, 38D DB 37D, 37D, 36D, 36D, 35D, 35D, 35D, 34D, 34D, 33D, 33D, 33D, 31D, 31D, 31D, 31D DB 31D, 31D, 30D, 30D, 30D, 29D, 29D, 29D, 29D, 28D, 28D, 28D, 28D, 28D, 28D, 27D DB 27D, 26D, 26D, 26D, 26D, 26D, 26D, 26D, 26D, 26D, 25D, 25D, 25D, 25D, 25D, 24D DB 24D, 24D, 24D, 24D, 24D, 23D, 23D, 23D, 23D, 23D, 23D, 22D, 22D, 22D, 22D, 22D DB 22D, 22D, 21D, 21D, 21D, 21D, 20D, 20D, 20D, 20D, 19D, 19D, 19D, 19D, 19D, 19D DB 19D, 19D, 18D, 18D, 18D, 18D, 18D, 18D, 18D, 18D, 18D, 17D, 17D, 17D, 17D, 17D DB 17D, 17D, 17D, 17D, 17D, 17D, 16D, 16D, 16D, 16D, 16D, 16D, 16D, 16D, 16D, 16D DB 16D, 16D, 15D, 15D, 15D, 15D, 15D, 15D, 15D, 15D, 15D, 15D, 15D, 15D, 15D, 14D DB 14D, 14D, 14D, 14D, 14D, 14D, 14D, 14D, 14D, 14D, 14D, 14D, 14D, 14D, 13D, 13D DB 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D, 13D DB 13D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D, 12D END 62 6 RESULTADOS ALCANÇADOS Este capítulo está destinado a apresentar o resultado final do projeto após a implementação e os testes realizados comparando com um instrumento comercial. 6.1 MONTAGEM Na figura 36 está apresentada a montagem do circuito analógico. O fio verde é o sinal ^ que ligará o circuito analógico com o circuito digital. Figura 36: Montagem do Circuito Analógico Na figura 37 está apresentado o circuito digital com as ligações do display. 63 Figura 37: Montagem do Circuito Digital 6.2 TESTES DE MEDIDAS Foram realizadas inúmeras medições com diversos valores de indutores e todas as medidas foram comparadas com um indutímetro comercial da Impac (www.impac.com.br). Na tabela 03 está o comparativo das medições realizadas pelo Indutímetro Digital e o Indutímetro Comercial da Impac. Nas figuras 38 estão apresentados os indutores utilizados nas medições. Os indutores A e B utilizam o núcleo de ferrite em comum, assim como ocorre com os indutores C e D, E e F e G e H. O Indutor I está em um encapsulamento (Figura 39). O indutor J é variável (Figura 40). 64 Indutor B Indutor F Indutor D Indutor C Indutor A Indutor H Indutor G Figura 38: Indutores de testes Figura 39: Indutor de Teste Indutor E 65 Figura 40: Indutor de Teste Variável Indutor A B C D E F G H I Jmin Jmax Jintermediário A+C A+B A+B+C A+B+C+D A+B+C+D+E A+B+C+D+E+F Indutímetro Digital Indutímetro Impac 23,0mH 23,4 mH 23,0 mH 23,4 mH 22,0 mH 22,7 mH 22,0 mH 22,7 mH 24,2 mH 23,8 mH 24,2 mH 23,8 mH 24,2 mH 22,3 mH 24,2 mH 22,3 mH 0,8 mH 1,2 mH 3,3 mH 3,3 mH 22,6 mH 21,3 mH 15,1 mH 15,2 mH 48,0 mH 46,3 mH 98,2 mH 100,2 mH 121,4 mH 122,9 mH 195,3 mH 190,1 mH 219,6 mH 212 mH 317,2 mH 285 mH Tabela 04: Comparativo de Medições 66 7 CONCLUSÃO Avaliando o projeto desenvolvido, conclui-se que os principais objetivos foram alcançados mesmo com toda a dificuldade que foi surgindo durante o seu desenvolvimento. O método escolhido é capaz de realizar a função de medir indutâncias, e com certeza, pode ser aperfeiçoado para quem sabe se tornar um produto comercializável. A escolha do circuito da figura 05 foi, com certeza, o passo mais importante no decorrer dos trabalhos, e apesar de que um circuito oscilador LC é um circuito simples de implementar, ele se mostrou extremamente complexo de analisar teoricamente. O microcontrolador realizou satisfatoriamente as funções necessárias, porem outro componente equivalente, mas com mais recursos, poderia facilitar o trabalho e melhorar a precisão de alguns cálculos. No contexto geral o desenvolvimento dos trabalhos foi muito proveitoso para a ampliação dos conhecimentos e para a demonstração de que a partir de uma simples ideia é perfeitamente possível chegar a um produto final. 67 8 BIBLIOGRAFIA • Study of DC Transient In RLC Circuits, version 2 EE IIT, Kharagour • Exercícios Resolvidos Departamento de Análise IME/UERJ, Augusto Cesar de Castro Barbosa • Cabo Programação AT89S52 – Centro Tecnológico Parobé –Curso de Eletrônica, Prof. Paulo Flores • Using HD44780 based LCDs – JHD162A, Suhas’s Blog • Microcontrolador 8051 Detalhado, Denys E. C. Nicolosi, Ed. Érica • Data Sheet AT89S52 – Atmel • Data Sheet LM331 – National Semiconductors • Data Sheet HEF4093B – Philips Semiconductors • Data Sheet JHD162A Series • Site Instituto Newton C. Braga – www.newtoncbraga.com.br