178532525
Anuncio

UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
CÁTEDRA:
ESTABILIDAD DE SISTEMAS ELECTRICOS
CATEDRÁTICO:
Ing. Torres Mayta Pedro
ALUMNOS:
Astete Pérez David
Armas alzamora Daniel
Bonifacio Orihuela Elvis
Clemente huamanlaso Jurasi
Espinoza Quispe José A.
Hinostroza Millán Iván
Llacza Carmelo James E.
Noa meza Cristian
Paccori Pillpa Luther
SEMESTRE:
X
2013 – I
ESTABILIDAD DE SISTEMAS DE POTENCIA
1
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
INDICE
Introducción
……………………………….. …………………3
ESTABILIDAD TRANSITORIA MÉTODO DE RUNGE KUTTA DE CUARTO ORDEN...5
1. El problema de estabilidad
…………………………………………………...5
2. Concepto de estabilidad transitoria
…………………………………………………...6
3. Método de Runge Kutta
…………………………………………………...6
3.1 introducción
……………………………………………………6
3.2 método de runge kutta 1 orden
……………………………………………………7
3.4 método de runge kutta 4 orden
……………………………………………………8
3.4.1 cuando el paso h esta fuera de la función
…………………………………….8
3.4.2 cuando el paso h esta fuera de la función
…………………………………...9
Ejemplo 1:
……….………………………………………….10
Ejemplo 2:
…………………………………………………..15
ESTABILIDAD DE SISTEMAS DE POTENCIA
2
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
INTRODUCCIÓN
A medida que el ser humano y la economía de los países se han desarrollado, la demanda de
energía ha aumentado constantemente, y dentro de este marco se ha producido un
crecimiento importante de la demanda energía eléctrica, que ha llegado a presentar un
porcentaje importante del consumo total de energía en el mundo.
En el Perú para poder satisfacer la creciente demanda, se ha ido fortaleciendo un sistema
eléctrico de potencia que se torna complejo. En los últimos años, la tendencia en la
producción de energía eléctrica ha sido deficitaria frente a la demanda de la misma, por lo
que para poder satisfacer dicha demanda una de las soluciones ha sido la interconexión de
sistemas, con sus ventajas y desventajas, asociando generadores que operan en paralelo y
cargas dentro de un gran sistema integrado.
Los sistemas eléctricos se han ido tornando cada vez más complejos y presentan una
variedad de retos de ingeniería tanto en el planeamiento, y construcción como la
operación del mismo.
El diseño total del sistema eléctrico de potencia debe ser afirmado sobre el control
automático y no sobre la respuesta lenta del operador humano. Para ser viable predecir el
funcionamiento del sistema, las nuevas exigencias han forzado a buscar siempre
herramientas más avanzadas de análisis y de síntesis.
En el presente trabajo, busca solucionar los problemas de la estabilidad transitoria utilizando el
método de Runge-Kutta de cuarto orden.
ESTABILIDAD DE SISTEMAS DE POTENCIA
3
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
ESTABILIDAD TRANSITORIA
METODO DE RUNGE KUTTA DE CUARTO ORDEN
1 EL PROBLEMA DE ESTABILIDAD
El problema de estabilidad esta concernido con el comportamiento de las máquinas
sincrónicas después de haber sido perturbadas. Si la perturbación no involucra cualquier
cambio neto en la potencia, las máquinas deben retornar a su estado original. Si existe un
desbalance entre la potencia suplida y la carga, creado por un cambio en la carga, en
generación, o en las condiciones de la red, un nuevo estado de operación es necesario.
En cualquier caso todas las máquinas sincrónicas interconectadas deben permanecer en
sincronismo si el sistema es estable; todas ellas deben permanecer operando en paralelo y a la
misma velocidad.
El transitorio que sigue a una perturbación del sistema es oscilatorio por naturaleza; pero si
el sistema es estable, estas oscilaciones serán amortiguadas y llevarán al sistema a una
nueva condición de operación y de equilibrio.
Estas oscilaciones, sin embargo, son
reflejadas como fluctuaciones en el flujo de potencia sobre las líneas de transmisión. Si una
interconexión conecta dos grandes grupos de máquinas y experimenta excesivas
fluctuaciones de potencia, esta puede ser disparada por su equipamiento de protecciones, de
tal modo, que desconecta los dos grupos de máquinas. Este problema refleja la estabilidad
de los dos grupos de máquinas, si la interconexión es disparada, los sistemas interconectados
deben operar como áreas independientes ya que tienen independencia operativa.
La estabilidad del sistema eléctrico de potencia es un importante problema en la seguridad de
la operación del sistema, la mayoría de los colapsos causados por inestabilidad ilustran la
importancia de este fenómeno. Históricamente, la inestabilidad transitoria ha sido un
problema de estabilidad dominante en la mayor parte de sistemas, y ha sido la preocupación
de la industria referente a la estabilidad del sistema.
La condición necesaria para la satisfactoria operación del sistema es que todas las
ESTABILIDAD DE SISTEMAS DE POTENCIA
4
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
máquinas sincrónicas, empleadas para la generación de energía eléctrica, permanezcan en
sincronismo. Este aspecto de estabilidad es influenciado por la dinámica del ángulo del
rotor del generador y las relaciones potencia-ángulo.
Las diferentes formas de inestabilidad dependen de la configuración y la operación
de
los sistemas eléctricos de potencia por lo que es necesario el entendimiento de la
complejidad de la operación, diseño y el uso de nuevas tecnologías y controles. Así también
el uso consistente de la terminología es requerido para desarrollar el criterio de operación y
diseño del sistema, de igual manera, las herramientas analíticas y procedimientos de estudio.
Los sistemas de potencia son sometidos a un amplio rango de disturbios, pequeños y grandes.
Pequeños disturbios ocurren continuamente en forma de cambios de carga; el sistema puede
ser capaz de ajustarse a las condiciones cambiantes y operar satisfactoriamente. Este
puede también ser capaz de soportar numerosos disturbios de una naturaleza severa,
tal como un corto circuito sobre una línea de transmisión o pérdida de un generador, de una
carga grande o de una interconexión entre dos áreas. Un gran disturbio puede conducir a
cambios estructurales debido al aislamiento de los elementos fallados.
La repuesta del sistema de potencia ante un disturbio puede involucrar a la mayoría del
equipo. Para una instancia, una falla sobre un elemento crítico seguido por el
aislamiento de los relés de protecciones, causará variaciones en flujos de potencia, voltajes
en las barras de la red y velocidades del rotor de las máquinas; debido a las variaciones de
voltaje deberán actuar conjuntamente los reguladores de voltaje de generadores y del sistema
de transmisión; para las variaciones
los
de
velocidad
del
generador
deben
actuar
gobernadores (reguladores de velocidad); debido al cambio en la cargabilidad del
sistema actuarán los controles de generación; los cambios en voltaje y frecuencia
afectarán a las cargas en el sistema en niveles que varían dependiendo de sus características
individuales.
Adicionalmente, los dispositivos utilizados para proteger a los equipos individualmente
podrían responder a variaciones en las variables del sistema y causar el disparo del
ESTABILIDAD DE SISTEMAS DE POTENCIA
5
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
equipamiento, debilitando al sistema y posiblemente conduciendo a la inestabilidad del
sistema.
En cualquier situación dada, sin embargo, las respuestas solamente de una cantidad limitada
de equipo pueden ser significativas. Por lo tanto, muchas consideraciones se hacen
generalmente para simplificar el problema y para centrarse en los factores que influencian el
tipo específico de problema de estabilidad.
La inestabilidad de un sistema también puede ocurrir sin pérdida de sincronismo, por
ejemplo puede llegar a ser inestable por colapso del voltaje, mantener el sincronismo no es
el problema en este caso, en su lugar la preocupación radica en la estabilidad y control de
voltaje. Esto ha creado la necesidad de revisar la definición y clasificación de estabilidad de
sistemas de potencia.
2 CONCEPTO DE ESTABILIDAD TRANSITORIA
La estabilidad transitoria es la capacidad del sistema de potencia de mantener el sincronismo
cuando es sometido a severas perturbaciones transitorias.
• Respuesta no lineal frente a perturbaciones severas
• Horizonte de tiempo de varios ciclos
3 METODO DE RUNGE KUTTA
3.1 INTRODUCCION
En análisis numérico, los métodos de Runge-Kutta son un conjunto de métodos genéricos
iterativos, explícitos e implícitos, de resolución numérica de ecuaciones diferenciales. Este
conjunto de métodos fue inicialmente desarrollado alrededor del año 1900 por los matemáticos
Carl David Tolmé Runge y Martin Wilhelm Kutta.
3.2 METODO DE RUNGE KUTTA 1 ORDEN
ESTABILIDAD DE SISTEMAS DE POTENCIA
6
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Todos los métodos de Runge-Kutta son generalizaciones de la fórmula básica de Euler, en la
que la función pendiente f se remplaza por un promedio ponderado de pendientes en el
intervalo xn x xn+1
yn1 yn h(w1k1 w2 k2 wm km )
donde las ponderaciones wi, i = 1, 2, …, m son constantes que satisfacen w1 + w2 + … + wm =
0, y ki es la función evaluada en un punto seleccionado (x, y) para el cual xn x xn+1.
El número m se llama el orden. Si tomamos m = 1, w1 = 1, k1 = f(x, yn), llegamos al método de
Euler. Por consiguiente, se dice que el método de Euler es un método de Runge-Kutta de
primer orden.
3.3 METODO DE RUNGE KUTTA 2ORDEN
Tratamos de hallar unas constantes de modo que la fórmula
yn 1 yn ak1 bk2
Donde
k2= f(xn+h, yn+hk1)
k1= f(xn, yn),
Concuerdo con un polinomio de Taylor de grado 2 , las constantes deben satisfacer:
w1 w2 1, w2
Luego
w1 1 w2 ,
1
1
, y w2
2
2
1
1
, y
2w2
2w2
Donde w2 0.
Ejemplo: escogemos w2 = ½ , de donde w1 = ½ , = 1, = 1, y (2) se transforma en
yn+1= yn+(k1+ k2)h/2
donde k1= f(xn, yn), k2= f(xn+h, yn+hk1).
Puesto que xn + h = xn+1, yn + hk1 = yn + hf(xn, yn), es idéntica al método de Euler
mejorado.
ESTABILIDAD DE SISTEMAS DE POTENCIA
7
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
3.4 METODO DE RUNGE KUTTA 4 ORDEN
Un miembro de la familia de los métodos Runge-Kutta es usado tan comúnmente que a
menudo es referenciado como «RK4» o como «el método Runge-Kutta».
3.4.1 CUANDO EL PASO H ESTA FUERA DE LA FUNCION
Los llamados métodos de Runge-Kutta son una serie de algoritmos para calcular
aproximaciones numéricas del valor de la solución de:
dy
f ( x, y ) ; y ( x0 ) y0
dx
en puntos de la forma siguiente:
x1 x0 h ; x2 x1 h ; etc
con muy buena precisión, sin que, para ello, sea necesario que los h sean muy pequeños.
El procedimiento consta de los siguientes pasos:
Para calcular un valor aproximado de la solución y1 en el punto
x1 = x0 + h, se calculan los siguientes números:
k1 h f ( x0 , y0 )
h
k
k 2 h f ( x0 , y0 1 )
2
2
h
k
k3 h f ( x0 , y0 2 )
2
2
k4 h f ( x0 h, y0 k3 )
ESTABILIDAD DE SISTEMAS DE POTENCIA
8
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
1
K 0 (k1 2k 2 2k3 k 4 )
6
Entonces se toma: y1 y0 K 0
Procediendo del mismo modo, calcularíamos el valor aproximado de
la solución, y2, en el punto x2 = x1 + h:
k1 h f ( x1 , y1 )
h
k
k 2 h f ( x1 , y1 1 )
2
2
h
k
k3 h f ( x1 , y1 2 )
2
2
k 4 h f ( x1 h, y1 k 3 )
1
K 0 (k1 2k 2 2k3 k 4 )
6
y2 y1 K 0
3.4.2 CUANDO EL PASO H ESTA DENTRO DE LA FUNCION
Definiendo un problema de valor inicial como:
dy
f ( x, y ) ; y ( x0 ) y0
dx
Entonces el método RK4 para este problema está dado por la siguiente ecuación:
1
yi 1 y I 1 (k1 2k 2 2k3 k 4 )h
6
Dónde:
ESTABILIDAD DE SISTEMAS DE POTENCIA
9
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
k1 f ( x1 , y1 )
hk
h
k 2 f ( x1 , y1 1 )
2
2
hk
h
k 3 f ( x1 , y1 2 )
2
2
k 4 f ( x1 h, y1 hk 3 )
Así, el siguiente valor (yn+1) es determinado por el presente valor (yn) más el producto del
tamaño del intervalo (h) por una pendiente estimada. La pendiente es un promedio ponderado
de pendientes, donde k1 es la pendiente al principio del intervalo, k 2 es la pendiente en el
punto medio del intervalo, usando k1 para determinar el valor de y en el punto xn+h/2 usando el
método de Euler. k 3 es otra vez la pendiente del punto medio, pero ahora usando k 2 para
determinar el valor de y;
k 4 es la pendiente al final del intervalo, con el valor de y
determinado por k 3 . Promediando las cuatro pendientes, se le asigna mayor peso a las
pendientes en el punto medio:
pendiente
1
( k1 2 k 2 2 k 3 k 4 )
6
Esta forma del método de Runge-Kutta, es un método de cuarto orden lo cual significa que el
error por paso es del orden de O(h5), mientras que el error total acumulado tiene el orden O(h4).
Por lo tanto, la convergencia del método es del orden de O(h4), razón por la cual es usado en
los métodos computaciones.
EJEMPLO 1:
Determine y (0.5) utilizando el método de Runge-Kutta de cuarto orden, en el intervalo
de interés [0, 0.5], en 5 intervalos.
y’ =4e0.8x – 0.5y ; y(0) =2 ; y(0.5) =?
h =0.5 – 0 / 5
h =0.1
por lo tanto x0 =0, x1 =0.1, x2 =0.3, x4 =0.4, x5 =0.5
ESTABILIDAD DE SISTEMAS DE POTENCIA
10
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
ITERACIÓN I
i =0 ; x0 =0 ; y0 =2
K1 =f [0, 2] =4e(0.8*0) – (0.5 * 2)
K1 =3
K2 =f [0 +0.1/2, 2 +(0.1 *3) /2] =f [0.05, 2.15] =4e(0.8*0.05) – (0.5 * 2.15)
K2 =3.088243
K3 =f [0 +0.1/2, 2 +(0.1 *3.088243) /2] =f [0.05, 2.154412]
K3 =4e(0.8*0.05) – (0.5 * 2.154412)
K3 =3.086037
K4 =f [0 +0.1, 2 +(0.1 *3.086037)] =f [0.1, 2.308603]
K4 =4e(0.8*0.1) – (0.5 * 2.308603)
K4 =3.178846
y1(0.1) =2 +{0.1 /6 [3 +(2 *3.088243) +(2 *3.086037) +3.178846]}
y1(0.1) =2.308790
ITERACIÓN II
i =1 ; x1 =0.1 ; y1 =2.308790
K1 =f [0.1, 2.308790] =4e(0.8*0.1) – (0.5 * 2.308790)
K1 =3.178753
K2 =f [0.1 +0.1/2, 2.308790 +(0.1 *3.178753) /2] =f [0.15, 2.467727]
K2 =4e(0.8*0.15) – (0.5 * 2.467727)
ESTABILIDAD DE SISTEMAS DE POTENCIA
11
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
K2 =3.276123
K3 =f [0.1 +0.1/2, 2.308790 +(0.1 *3.276123) /2] =f [0.15, 2.472596]
K3 =4e(0.8*0.15) – (0.5 * 2.472596)
K3 =3.273689
K4 =f [0.1 +0.1, 2.308790 +(0.1 *3.273689)] =f [0.2, 2.636158]
K4 =4e(0.8*0.2) – (0.5 * 2.636158)
K4 =3.375964
y2(0.2) =2.308790 +{0.1 /6 [3.178753 +(2 *3.276123) +(2 *3.273689) +3.375964]}
y2(0.2) =2.636362
ITERACIÓN III
i =2 ; x2 =0.2 ; y2 =2.636362
K1 =f [0.2, 2.636362] =4e(0.8*0.2) – (0.5 * 2.636362)
K1 =3.375862
K2 =f [0.2 +0.1/2, 2.6366362 +(0.1 *3.375862) /2] =f [0.25, 2.805155]
K2 =4e(0.8*0.25) – (0.5 * 2.805155)
K2 =3.483033
ESTABILIDAD DE SISTEMAS DE POTENCIA
12
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
K3 =f [0.2 +0.1/2, 2.636362 +(0.1 *3.483033) /2] =f [0.25, 2.810513]
K3 =4e(0.8*0.25) – (0.5 * 2.810513)
K3 =3.480354
K4 =f [0.2 +0.1, 2.636362 +(0.1 *3.480354)] =f [0.3, 2.984397]
K4 =4e(0.8*0.3) – (0.5 * 2.984397)
K4 =3.592798
y3(0.3) =2.636362 +{0.1 /6 [3.375862 +(2 *3.483033) +(2 *3.480354) +3.592798]}
y2(0.3) =2.984619
ITERACIÓN IV
i =3 ; x3 =0.3 ; y3 =2.984619
K1 =f [0.3, 2.984619] =4e(0.8*0.3) – (0.5 * 2.984619)
K1 =3.592687
K2 =f [0.3 +0.1/2, 2.984619 +(0.1 *3.592687) /2] =f [0.35, 3.164253]
K2 =4e(0.8*0.35) – (0.5 * 3.164253)
K2 =3.710392
K3 =f [0.3 +0.1/2, 2.984619 +(0.1 *3.710392) /2] =f [0.35, 3.170138]
K3 =4e(0.8*0.35) – (0.5 * 3.170138)
K3 =3.707450
ESTABILIDAD DE SISTEMAS DE POTENCIA
13
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
K4 =f [0.3 +0.1, 2.984619 +(0.1 *3.707450)] =f [0.4, 3.355364]
K4 =4e(0.8*0.4) – (0.5 * 3.355364)
K4 =3.830829
y4(0.4) =2.984619 +{0.1 /6 [3.592687 +(2 *3.710392) +(2 *3.707450) +3.830829]}
y2(0.4) =3.355606
ITERACIÓN V
i =4 ; x4 =0.4 ; y4 =3.355606
K1 =f [0.4, 3.355606] =4e(0.8*0.4) – (0.5 * 3.355606)
K1 =3.830708
K2 =f [0.4 +0.1/2, 3.355606 +(0.1 *3.830708) /2] =f [0.45, 3.547141]
K2 =4e(0.8*0.45) – (0.5 * 3.547141)
K2 =3.959747
K3 =f [0.4 +0.1/2, 3.355606 +(0.1 *3.959747) /2] =f [0.45, 3.553593]
K3 =4e(0.8*0.45) – (0.5 * 3.553593)
K3 =3.956521
K4 =f [0.4 +0.1, 3.355606 +(0.1 *3.956521)] =f [0.5, 3.751258]
K4 =4e(0.8*0.5) – (0.5 * 3.751258)
ESTABILIDAD DE SISTEMAS DE POTENCIA
14
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
K4 =4.091669
y5(0.5) =3.355606 +{0.1 /6 [3.830708 +(2 *3.959747) +(2 *3.956521) +4.091669]}
La solución requerida es
y5(0.5) =3.751521
EJEMPLO 2:
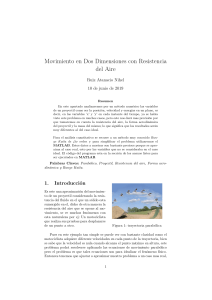
En este ejemplo, se analiza la estabilidad transitoria de una central térmica que consta de cuatro
estaciones de 555 MVA, 24KV, 60Hz. Unidades que suministran energía a un Bus infinito a través de
dos líneas de trasmisión mostradas en la figura 1
Figura 1
Las reactancias en la red que se muestran en la figura están por unidad con 2220 MVA, 24kV de base.
(Referidos en la línea de trasmisión en el lado de alta del transformador). Se asume que las resistencias
son insignificantes.
La condición inicial del sistema de operación, con cuantificaciones expresadas en por unidad con 2220
MVA, 24kV de base, se muestra de la siguiente manera.
𝑃 = 0.9
𝑄 = 0.436 (𝑠𝑜𝑏𝑟𝑒𝑒𝑥𝑖𝑡𝑎𝑑𝑜)
Ē𝑡 = 1.028.34°
Ē𝐵 = 0.900810°
Los generadores son modelados en un circuito equivalente representado por un generador de modelo
clásico con los siguientes parámetros expresados en por unidad con 2220 MVA, 24kV de base:
𝑋𝑑ǀ = 0.3
𝐻 = 3.5 𝑀𝑊. 𝑠/𝑀𝑉𝐴
𝐾𝐷 = 0
En el circuito dos se muestran una falla trifásica en el punto F, y la falla es eliminada mediante el
aislamiento del circuito de falla.
DETERMINAR:
ESTABILIDAD DE SISTEMAS DE POTENCIA
15
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
a) Determine el tiempo de despeje de la falla crítica y el ángulo crítico mediante el cálculo de
tiempo de respuesta del ángulo del rotor, mediante la integración numérica.
SOLUCION
Con el generador representado con el modelo clásico, el circuito equivalente del sistema se
muestra en la siguiente figura.
Por la condición inicial de la operación, el voltaje en retraso 𝑋𝑑ǀ es.
Ēǀ = Ē𝑡 + 𝑗𝑋𝑑ǀ Ī𝑡
Ēǀ = 1.028.34° + 𝑗
𝑗0.3(0.9 − 𝑗0.436)
1.0 − 28.34°
Ēǀ = 1.162628.34°
En la siguiente figura se muestra el circuito equivalente reducido representado en las tres
condiciones del sistema: en la pre falla, durante la falla, y la post falla. También se muestra en la figura
también se muestra en la figura son las expresiones correspondientes para la salida de la potencia
eléctrica como una función de .
1) En la pre falla
𝑃𝑒 =
ESTABILIDAD DE SISTEMAS DE POTENCIA
1.1626𝑥0.90081
𝑠𝑒𝑛𝛿
0.7752
𝑃𝑒 = 1.1341𝑠𝑒𝑛𝛿
16
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
2) Durante la falla
𝑃𝑒 = 0
3) Post Falla.
𝑃𝑒 =
1.1626𝑥0.90081
𝑠𝑒𝑛𝛿
0.95
𝑃𝑒 = 1.1024𝑠𝑒𝑛𝛿
a) El tiempo de respuesta usando la integración numérica.
La ecuación:
2𝐻 𝑑2
= 𝑃𝑚 − 𝑃𝑚𝑎𝑥 𝑠𝑖𝑛
𝑤0 𝑑𝑡 2
Puede ser escritos de dos ecuaciones de primer orden:
𝑃(𝛥𝑤𝑟 ) = 7.0 (0.9 − 𝑃𝑚𝑎𝑥 𝑠𝑖𝑛
1
𝑃 − 𝑃𝑚𝑎𝑥 𝑠𝑖𝑛
2𝐻 𝑚
……. Ecuación 3
𝑃() = 377(𝛥𝑤𝑟 )
𝑃() = 𝑤0 (𝛥𝑤𝑟 )
…… Ecuación 4
𝑃(𝛥𝑤𝑟 ) =
1
Dónde:
ESTABILIDAD DE SISTEMAS DE POTENCIA
17
UNIVERSIDAD NACIONAL DEL CENTRO DEL PERÚ
INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
𝑃𝑚𝑎𝑥 = {
1.351 antes de la falla
0
durante la falla
1.1024 después de la falla
Los valores iniciales de y 𝛥𝑤𝑟 son 41.77° y 0 pu, Respectivamente.
Cualquiera de los métodos de integración numérica se describen pueden ser usados para resolver
estas ecuaciones 3 y 4. Para las ilustraciones consideramos el segundo método de Runge-Kutta. La
fórmula general está dado por los valores de , 𝛥𝑤𝑟 y t para los (𝑛 + 1)𝑠𝐼 … pasos de integración
son los siguientes:
(𝛥𝑤𝑟 )𝑛+1 = (𝛥𝑤𝑟 )𝑛 +
𝛿𝑛+1 = 𝛿𝑛 +
𝐾1𝐼 + 𝐾2𝐼
2
𝐾1𝐼𝐼 + 𝐾2𝐼𝐼
2
𝑡𝑛+1 = 𝑡𝑛 + ∆𝑡
Dónde:
𝐾1𝐼 = [0.1286 −
𝑃𝑚𝑎𝑥
𝑠𝑒𝑛(𝛿)𝑛 ] ∆𝑡
7.0
𝐾1𝐼𝐼 = [377(∆𝑤𝑟 )𝑛 ]∆𝑡
𝐾2𝐼 = [0.1286 −
𝑃𝑚𝑎𝑥
𝑠𝑒𝑛(𝛿𝑛 + 𝐾1𝐼𝐼 )] ∆𝑡
7.0
𝐾2𝐼𝐼 = {377[(∆𝑤𝑟 )𝑛 + 𝐾1𝐼 ]}∆𝑡
ESTABILIDAD DE SISTEMAS DE POTENCIA
18