Descargar - Biblioteca Digital CPA
Anuncio

UNIVERSIDAD NACIONAL DE CORDOBA
FACULTAD DE CIENCIAS EXACTAS FÍSICAS y NATURALES
ESCUELA DE AGRIMENSURA
CÁTEDRA: TRABAJO FINAL
GNSS: DESCRIPCIÓN, ANÁLISIS Y
COMPARACIÓN CON LOS SISTEMAS DE
NAVEGACIÓN POR SATÉLITES
ALUMNO:
MATRICULA:
MANUEL, ARIEL EDGARDO
27985389
Profesor Titular:
Ing. Agrimensor Luís Bosch
Profesor Adjunto:
Ing. Agrimensor Miguel Díaz Saravia
Profesor Asistente:
Agrimensor Mario Piumetto
Abril de 2012
A mi familia
Siembra un acto y cosecharás un hábito.
Siembra un hábito y cosecharás un carácter.
Siembra un carácter y cosecharás un destino.
-Charles Reade-
Agradecimientos:
En primer lugar agradecer a mi Familia por comprender y aceptar el que me fuera tan lejos de mi lugar de
origen, San Rafael – Mendoza, a estudiar ésta carrera que amo, a ellos les dedico éste y los futuros logros.
A mi primo Federico Carrasco, que fue el que genero mis deseos de vivir con él en Córdoba, y dejar todo una
vida por quien soy hoy en día.
A mis profesores de la cátedra Trabajo Final, el ingeniero Agrimensor Luís Bosch por ayudarme
incondicionalmente a la realización de este trabajo, por esas interminables tardes que pasábamos en la facultad
y en su casa corrigiendo y perfeccionando el trabajo, haciendo uso del tiempo de su vida privada para estar al
lado mío. Al ingeniero Agrimensor Miguel A. Díaz Saravia por su gran apoyo y el ofrecimiento de las
instalaciones de la facultad para desarrollar mi proyecto. Y al agrimensor Mario Piumetto, a ellos les agradezco
por contribuir en gran medida, a lograr mis metas y darme la oportunidad de realizar este proyecto fin de
carrera, por su apoyo y comprensión. Sin la inestimable ayuda que me ha brindado, este proyecto no habría sido
posible. Gracias por orientarme y ayudarme en todo momento.
Me gustaría dar las gracias a la Facultad de Ciencias Exactas, Físicas y Naturales, perteneciente a la
Universidad Nacional de Córdoba, en la cual he cursado mi carrera a lo largo de estos años, y de la que
guardaré sin duda un grato recuerdo. Tanto los profesores como el personal de administración, han sido siempre
cordiales en su trato, he aprendido mucho a lo largo de mis estudios no sólo académicamente, sino
personalmente y no puedo expresar más que agradecimiento a todos los miembros que trabajan en la Facultad.
-2-
Un agradecimiento especial a Julio Murua, encargado del equipamiento de la facultad, quien en todo momento
estuvo cuando más lo necesite, haciendo hasta lo imposible para que pudiera usar los equipos.
En último lugar a mis AMIGOS de esta parte de mi vida, porque decir compañeros seria no expresar el
sentimiento que siento por esas personas que me han apoyado a lo largo de estos años y que han creído en mí.
Ariel E. Manuel
RESUMEN
GNSS (Global Navigation Satellite System), es el acrónimo que se refiere al conjunto de
tecnologías de sistemas de navegación por satélite que proveen de posicionamiento geoespacial con
cobertura global de manera autónoma. Un receptor de GNSS es capaz de determinar su posición en
cuatro dimensiones (longitud, latitud, altitud, y tiempo), lo que ha dado lugar a multitud de
aplicaciones civiles y militares.
Los orígenes del GNSS se sitúan el los años 70 con el desarrollo del sistema militar
estadounidense GPS (Global Positioning System). Luego la ex Unión Soviética (hoy Rusia),
desarrolla su propio sistema de navegación por satélite llamado GLONASS (Global Orbiting
Navigation Satellite System), en el cual estos dos sistemas constituyen hoy en día al GNSS. Los
futuros sistemas que se incorporarán al proyecto son el que representa la Unión Europea, llamado
GALILEO, el propuesto por Japón, QZSS, el perteneciente a la República de China, BEIDOU
(Compass), mas el sistema regional propuesto por la India el IRNSS. También el sistema GNSS
está incorporado por sistemas de aumentación satelital (SBAS), en lo que se puede nombrar a
WAAS (EEUU), EGNOS (UE), MSAS (Japón), GAGAN (India), SNAS (China) y SACCSA
(Caribe, América Central y Sudamérica). Y una extensa red de antenas terrestre (GBAS).
En este trabajo se estudia el estado del arte de los sistemas GNSS: abordando distintos
aspectos de dicha tecnología, así como su composición y funcionamiento, posibles fuentes de error
o aplicaciones. Se presentaran también los distintos sistemas existentes en la actualidad y futuros
proyectos.
El objetivo principal es hacer un análisis exhaustivo y comparativo del funcionamiento del
sistema GNSS (GPS + GLONASS) en el ambiente Topográfico, llevando a la práctica de campo lo
que indica la teoría de sus ventajas con respecto a su antecesor el GPS, tanto en planimetría como
en altimetría.
ABSTRATC
GNSS (Global Navigation Satellite System), is the acrónimo that refers to the set of system
technologies of navigation for satellite that they provide with positioning geoespacial with global
coverage of an autonomous way. GNSS's recipient is capable of determining his position in four
dimensions (length, latitude, altitude, and time), which has given place to multitude of civil and
military applications.
The origins of the GNSS place the 70`s with the development of the military American
system GPS (Global Positioning System) Then the Ex-Soviet Union (today Russia), he constructs
his own system of navigation for satellite called GLONASS (Global Orbiting Navigation Satellite
System), which these two systems constitute nowadays the GNSS. The future systems that were
joining will be the one that represents the European Union, called GALILEO, the proposed one for
Japan, QZSS, the belonging one to the Republic of China, BEIDOU (Compass), mas the regional
system proposed by the India the IRNSS. Also the system GNSS is incorporated by systems of
increase satelital (SBAS)), in what it is possible to nominate WAAS (the) (USA), EGNOS (EU),
MSAS (Japan), GAGAN (India), SNAS (China) and SACCSA (Carib, Central America and South
America). And an extensive terrestrial network of antennas (GBAS).
In this work there is studied the condition of the art of the systems GNSS: approaching
different aspects of the above mentioned technology, as well as his composition and functioning,
-3-
possible sources of mistake or applications. They were presenting also the different existing
systems at present and future projects.
The principal aim is to do an exhaustive and comparative analysis of the functioning of the
system GNSS (GPS + GLONASS) in the Topographic environment, taking to the field practice
what indicates the theory of his advantages with regard to his predecessor the GPS, both in mapping
and in altimetry.
-4-
INTRODUCCIÓN
Desde que en 1957 el lanzamiento del Sputnik-1 supuso el comienzo de la era de los
satélites artificiales y su posterior uso en aplicaciones para el interés de la comunidad mundial, la
tecnología ha avanzado en este aspecto de manera espectacular, y uno de los campos en los cuales
se ha manifestado especialmente dicho avance, es en las aplicaciones que conciernen a las ciencias
de la Tierra, y dentro de ellas, de manera notable en el estudio de su forma y dimensiones
(Geodesia), así como, en el estudio de los fenómenos físicos que afectan y condicionan dicha forma
y dimensiones (Geofísica).
Dentro de los grupos de Sistemas de Geodesia Espacial, destacan la Constelación
NAVSTAR (Navegación por Satélite en Tiempo y Distancia) y la Constelación GLONASS
(Sistema Global de Navegación por Satélite). Ambas constelaciones fueron creadas por los
Departamentos de Defensa de los Estados Unidos y Rusia, respectivamente, y sus principal
cometido era poder posicionar un objeto en la superficie de la Tierra a través de las señales emitidas
en forma de ondas de radio por los satélites de dichas constelaciones, que dicho objeto procesaba en
la superficie, determinando así su posición con una precisión en función del tipo de información
recibida, tiempo de recepción y condiciones de la emisión.
Este posicionamiento se produce sobre un sistema de referencia inercial cartesiano, que en
el caso de usar la constelación americana NAVSTAR corresponde al sistema WGS-84, y en el caso
de usar la constelación rusa GLONASS corresponde al sistema PZ-90.
A principios de los años 80s, se empezaron a utilizar estos métodos para aplicaciones de
índole civil, tales como actividades de navegación aérea, marítima y terrestre, lo que supuso un
importante avance en la organización y el estado de los transportes y comunicaciones mundiales.
La investigación y el tratamiento de estos sistemas de posicionamiento por satélite, ha
llevado en la actualidad a que sean utilizados para fines científicos, destacando el estudio de la
Atmósfera terrestre, de sus capas, fenómenos, y muy especialmente para el estudio de la Ionosfera,
desconocida en muchos aspectos y con una gran influencia sobre los distintos fenómenos que
ocurren en nuestro planeta.
Pero quizá, las aplicaciones en las cuales estos sistemas han calado más hondo son la
Geodesia y la Topografía, a partir del descubrimiento de que dichos sistemas de posicionamiento
podían aportar las precisiones requeridas para el desarrollo de estas disciplinas y su aplicación en el
desarrollo de infraestructuras, cartografía, dimensionamientos, sistemas de información geográfica,
estudios de movimientos y deformaciones, y para fines más expeditos como la navegación y el ocio.
Es por ello que constituyen, hoy por hoy, unos de los sistemas de medida más usados y con
mayores expectativas de futuro. Este hecho los obliga a estar en continua evolución para que la
comunidad mundial obtenga resultados cada vez más satisfactorios. Pero es esta comunidad, y en
concreto los profesionales de las materias afectadas, los que deben disponer de la documentación y
experiencias necesarias para llegar a dominar estos métodos de trabajo y obtener de ellos el máximo
rendimiento.
El objetivo de este trabajo final de carrera no es otro que orientar de forma básica a los
usuarios de estos sistemas e invitar a los futuros usuarios a calar en su funcionamiento y
posibilidades de desarrollo, tratando al campo de la medición por satélite como una poderosa
herramienta de trabajo, y que hoy por hoy, se está convirtiendo en el método más usado por su
precisión y rapidez en los campos antes reseñados, siendo este el motivo por el cual no debe pasar
desapercibido por ninguno de nuestros profesionales.
-5-
OBJETIVOS
Con el único objetivo con que se afronto este trabajo final de carrera, era poder desarrollar
conocimientos relacionados con el Sistema Global de Navegación por Satélite (GNSS), en el campo
de la Topografía y Geodesia. Nace esta idea, debido a que para la Escuela de Agrimensura de
nuestra Facultad no contaba con un trabajo que tratase el tema tanto en la teoría como en la práctica.
Esta iniciativa se origina por la adquisición de un equipo satelital simple frecuencia y doble
constelación, bajo estas condiciones se decide afrontar el desafío que teníamos enfrente de nosotros.
Esto también marca la gran importancia para la cátedra de Trabajo Final en el tratamiento del tema,
para tener en sus archivos facultativos un primer trabajo que desarrollaba el GNSS, dando el punta
pie inicial para nuevas y más profundas investigaciones.
Se confronto el inconveniente del modo de hacer la “comparación” de los distintos
sistemas de medición satelital actuales que integran un GNSS.
Para llegar a las exigencia que se merece éste análisis, se necesita hacer un estudio
exhaustivo en forma individual de la técnica de medición satelital vigente, la cual está integrada por
sus antecesores GPS, GLONASS y por el futuro proyecto GALILEO.
Incorporando información necesaria para el conocimiento, alcances, técnicas de medición y
procesamiento de los datos obtenidos, para construir un ideal de cuales son los limites de los
sistemas globales de navegación por satélites.
Construyendo un ideal si es conveniente el uso de estos equipos de gran avance
tecnológico, para incrementar una precisión dada en las mediciones de campo del profesional
actuante.
METAS
La Meta ha lograr con éste trabajo, es hacer una descripción de los pasos para lograr
sentenciar los objetivos previamente descriptos, haciendo todo un estudio de campo y gabinete con
innumerables métodos y técnicas de mediciones.
Se necesita hacer un levantamiento topográfico de los puntos que intervienen en el análisis,
ello es, utilizar diferentes técnicas que involucran la actividad de un Ingeniero Agrimensor, ya sea
en la parte planimétrica como en la altimétrica, a saber:
1. Sobre un sistema de apoyo, el cual pertenece a la Universidad Nacional de
Córdoba, confeccionar un levantamiento planimétrico con GNSS y hacer su
comparación con mediciones previamente practicadas con GPS y Estación Total.
2. Sobre una red de puntos ubicados en la localidad de Agua de Oro, en la cual poseen
cotas obtenidas a través de nivelación geométrica, efectuar un levantamiento
altimétrico en GNSS y GPS, para luego su contralor.
Este análisis que contempla ventajas y desventajas del Sistema Global de Navegación por
Satélite, se transmitirán los resultados obtenidos, para que el profesional puede desempeñarse con
un mayor abanico de posibilidades dentro del ámbito laboral, ayudando a la decisión de qué, cómo
y cuáles son estos equipos, con un gran avance tecnológico, para un mejor aprovechamiento en la
práctica de la Agrimensura.
-6-
CAPITULO 1
MARCO TEORICO
El en presente informe se pretende hacer un estudio exhaustivo y comparativo de los distintos sistemas de
medición satelital en el campo de la topografía y geodesia, con el fin de corroborar y alentar la idea del uso de los
sistemas GNSS en al ámbito laboral que participa un profesional de la topografía como es el Ingeniero
Agrimensor.
Para tal fin, se fórmulara una capitulación cronológica de cómo surgieron estos sistemas satelitales, su
evolución, como en la actualidad están formados y sus futuros logros.
Este capitulo introductorio esta dedicado a exponer el funcionamiento del Sistema de Navegación
Global por Satélite (GNSS), exhibir sus características, prestaciones, aplicaciones, objetivos, etc.
SISTEMAS GLOBALES DE NAVEGACIÓN POR SATÉLITE
1.1. INTRODUCCIÓN
Los Sistemas Globales de Navegación por Satélite son, en pocas palabras, un conjunto de elementos que
tienen por objetivo permitir la localización en tiempo real de un usuario situado en cualquier lugar del ámbito
terrestre, en cualquier momento y bajo cualquier condición meteorológica permitiendo, así mismo, la
diseminación de tiempos precisos. Constan, básicamente, de una constelación de satélites orbitando alrededor de
la Tierra en una órbita media (20.000 Km. de altitud) que emiten señales con las que el receptor puede estimar
tanto la distancia como la posición de estos satélites y, mediante trilateración, calcular la suya propia. Se trata de
sistemas pasivos ya que no necesitan interactuar con cada receptor sino que es este último el que, simplemente
recibiendo la señal, es capaz de realizar todos los cálculos de manera independiente. Esta unidireccionalidad hace
que estos sistemas sean accesibles a un número ilimitado de usuarios.
Actualmente existen dos Sistemas Globales de Navegación por Satélite activos:
•
El Sistema de Posicionamiento Global (GPS, Global Positioning System) de los Estados Unidos
de América
•
El Sistema Orbital Mundial de Navegación por Satélite (GLONASS, Global Orbiting Navigation
Satellite System) de la Federación Rusa
Son los únicos que forman parte del concepto GNSS. Luego con aspiraciones de integrar este concepto
esta el proyecto la Unión Europea GALILEO con un gran avance en su desarrollo, logrando acoplarse a este
proyecto aproximadamente en el año 2013.
Como proyecto a largo plazo se presentan Sistemas de Navegación Satelital que podrían ser o no
adoptados internacionalmente para formar parte del GNSS y que están en proceso de desarrollo, ellos son:
•
El BEIDOU, COMPASS o BNTS (BeiDou/Compass Navigation Test System) de la República
Popular China
•
El QZSS (Quasi-Zenith Satellite System) de Japón
•
El IRNSS (Indian Regional Navigation Satellite System) de la India.
-7-
1.2. ANTECEDENTES DE RADIONAVEGACIÓN Y NAVEGACIÓN POR SATÉLITE
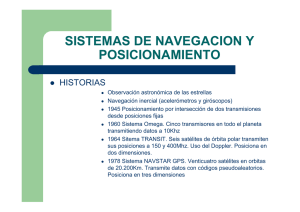
Los orígenes de la radionavegación datan de la segunda guerra mundial con el desarrollo de los sistemas
GEE en Gran Bretaña y LORAN en Estados Unidos, en el cual utilizaban radiotransmisores de baja frecuencia
(100 Khz.) terrestres en vez de satélites. Ambos están basados en calcular la diferencia de tiempos con la que
llegan las señales provinentes de un mínimo de tres transmisores sincronizado.
Estos sistemas difundían un pulso de radio desde una localización "maestra" conocida, seguido por pulsos
repetidos desde un número de estaciones "esclavas". El retraso entre la recepción y el envío de la señal en las
estaciones auxiliares era controlado, permitiendo a los receptores comparar el retraso entre la recepción y el
retraso entre enviados. A través de este método se puede conocer la distancia a cada una de las estaciones
auxiliares.
El primer sistema global de radionavegación con disponibilidad continua, bautizado como OMEGA,
comienza a usarse en la década de los ‘70 con la finalidad principalmente militar, de determinar la posición de
barcos. La precisión del sistema era de unos 2 a 4 Km. 1
1.2.1.
SISTEMAS DE RADIONAVEGACIÓN:
1.2.1.1.
SISTEMA VOR
Es un sistema de navegación de corto y medio alcance en VHF. Actualmente, es el sistema más empleado
en todo el mundo para la navegación, basándose en una importante y cada vez más extensa red de aerovías.
Constituye, por otra parte, una ayuda para las proximidades instrumentales, aunque sean de no precisión.
Los sistemas VOR constan de una instalación en tierra, emisor y antena y una instalación a bordo de la
aeronave, compuesta por una antena, un receptor, un servoamplificador y un indicador.
1.2.1.1.1.
EQUIPO DE TIERRA. PRINCIPIOS DE FUNCIONAMIENTO
La operación de un equipo VOR de tierra esta basada en la diferencia de fase entre dos señales que emite:
una de referencia y otra variable. La fase de referencia, de 30 Hz., es omnidireccional, es decir, se transmite desde
la estación en forma circular, permaneciendo constante en todos los sentidos. Esta señal de referencia modula en
frecuencia a una onda subportadora de 9.960 Hz., la cual modula a su vez en amplitud a la portadora. La
fase variable, también de 30 Hz., modula en amplitud a la onda portadora y se transmite a través de una antena
direccional, que gira a una velocidad de 1.800 rpm.
El VOR emite un número infinito de haces que pueden verse desde la estación, como si fuera los radios de
una rueda. Estos haces son conocidos como radiales y se identifican por su marcación magnética de salida de
estación. Los radiales de un VOR son infinitos, pero el equipo de abordo es capaz de diferenciar 360 de ellos.
En una estación de VOR, un sistema de monitores y dos transmisores, aseguran un servicio continuo de
funcionamiento. Si la señal del equipo se interrumpe por cualquier causa, o varían sus fases, el sistema de
monitores desconecta el equipo defectuoso, conectando a su vez un transmisor auxiliar y excitando una alarma en
el panel de control que indica un fallo en el sistema. El equipo transmisor trabaja en VHF en la banda de 112 Mhz
a 118 Mhz, en frecuencia que termina en décimas pares o impares, y centésimas impares. Se podrán usar
frecuencias comprendidas entre 108 y 112 Mhz, cuando:
1
o
Se usen en VOR de cobertura limitada únicamente
o
No se usen solo frecuencias que terminen bien en décimas pares o centésimas impares de
Mhz
o
No se utilicen estas frecuencias para el sistema ILS
o
No ocasionen interferencias al ILS
Misra y Enge, 2001.
-8-
Las distintas estaciones de VOR se clasifican por su altitud y distancia libre de interferencias a la que
pueden recibir. Existen dos criterios sobre el particular: el americano y el de OACI.
La clasificación americana de la F.A.A (Federal Aviation Administration) es la siguiente:
o
T-VOR. VOR : Terminal o de recalada
o
L-VOR.VOR: de baja altitud
o
M-VOR.VOR: de medio alcance
o
H-VOR.VOR: de gran altitud
Los alcances de los distintos tipos de VOR no deben confundirse con una mayor o menor potencia de
emisión de las estaciones de tierra, pues ésta es prácticamente la misma para todos, situándose alrededor de los
200 w.
1.2.1.1.2.
EQUIPO DE A BORDO DE LA AERONAVE
Cuatro son los componentes del equipo de a bordo del sistema VOR. Estos son:
o
ANTENA
o
RECEPTOR
o
SERVOAMPLIFICADOR
o
INDICADOR
ANTENA: cabe destacar su forma en “V”, su ubicación es siempre en el estabilizador vertical de cola o
en la parte superior del fuselaje. Su misión consiste en recibir las líneas de flujo electromagnético emitidas por la
estación de tierra y transmitirlas al receptor.
RECEPTOR: la función del receptor consiste en interpretar o medir, con ayuda de los indicadores, la
diferencia de fase entre las dos señales, la e referencia y la variable, emitidas por el equipo de tierra.
SERVOAMPLIFICADOR: la energía electromagnética llega desde el emisor de tierra hasta la antena de a
bordo. Desde allí es enviada al receptor, donde es convertida en impulsos eléctricos. Estos impulsos no bastaran
para producir las deflexiones necesarias en indicador de VOR, por lo que se tienen que ser tratados por un
servoamplificador. Una vez amplificados los impulsos ya pueden ser transmitidos al indicador.
INDICADOR: la función única de indicador del VOR, es mostrar al piloto su situación con respecto a la
estación de tierra en cualquier momento. La información es clara y precisa y da, constantemente indicaciones de
mando, o de que debe hacer el piloto, para mantener a la aeronave sobre una ruta determinada. 2
1.2.1.2.
SISTEMA TACAN
TACAN (Tactical Air Navigation), es un tipo de ayuda a la navegación de uso militar. La información
que proporciona al piloto es la de azimut y la distancia con respecto a la instalación de tierra, dando pues, en cada
instante, la posición del avión.
El equipo de tierra esta constituido por un receptor - transmisor y una antena giratoria para la transmisión
de información de marcaciones magnéticas y la distancia. La distancia la recibe el piloto a través de su equipo
radio telemétrico (DME).
El TACAN trabaja en UHF y puede ser sintonizado en uno de los 126 canales que le han sido asignados a
este tipo de radioayuda. Los canales van espaciados 0.5 Mhz.
2
FORSSELL, BÖRJE: Radionavigation systems. Prentice Hall 1991.
TETLEY, L., CALCUTT, D.: Electronic Aids to navigation. Edward.
-9-
La identificación de las estaciones TACAN es auditiva, en código MORSE, y esta compuesta por tres
letras que se repiten una vez cada 30 segundos.
La cobertura del equipo es similar a la del VOR y su exactitud puede calibrarse en ± 1°
El cono de silencio en los TACAN es muy grande, del orden de 13 o 15 NM a 40.000. Por ello, y para
evitar errores, únicamente se considera pasada la estación, cuando el equipo DME indique un incremento de
distancia. Los indicadores de abordo que usa el equipo TACAN, son los mismos que los utilizados para el VOR. 3
1.2.1.3.
SISTEMA VORTAC
El VORTAC es una radioayuda que combina las funciones del VOR y de los TACAN, y transmite
información en azimut en VHF y UHF y de distancia en UHF. De esta manera, tanto las aeronaves equipadas con
VOR, DME, TACAN, recibirán información de azimut y distancia al VORTAC.
1.2.1.4.
SISTEMA LORAN
El Long Range Navigation, LORAN es un sistema de navegación hiperbólica radioeléctrico de largo
alcance, que opera en baja y media frecuencia. Este equipo proporciona información de posición midiendo la
diferencia de tiempo en microsegundos, entre la llegada de dos señales de radio desde dos estaciones transmisoras
de tierra.
Para navegar con el sistema LORAN es necesario sintonizar dos grupos de estaciones en tierra. Cada uno
de ellos esta constituido por dos equipos emisores que reciben el nombre de estación primaria y estación
secundaria.
Lógicamente, cada grupo de estaciones LORAN emitirá en frecuencias distintas. Centrándose el estudio
en uno de los grupos transmisores, el proceso seguido es el siguiente: la estación principal del grupo LORAN
emite ondas electromagnéticas de radio que son captadas por el avión o embarcación y por la estación secundaria,
la cual envía sus propias señales hacia la aeronave.
Las señales que lanza la estación principal llegan al equipo de abordo antes que las de la estación
secundaria, con una diferencia de tiempo tal, que dependerá de la posición del avión o embarcación. El receptor
LORAN analizara la diferencia de tiempo entre las dos señales.
Esa diferencia de tiempo determinara una línea que debido a la posición relativa de las estaciones
principal y secundaria, y al recorrido que deba efectuar las ondas hasta llega al avión, tendrá la forma de una
hipérbola.
La aeronave puede estar situada en cualquier punto de la hipérbola. Pues en cada uno de sus puntos, la
diferencia de tiempo en la llegada de las señales de las estaciones LORAN, es constante.
Para conocer exactamente la posición del avión sobre la hipérbola será necesario sintonizar otro grupo
LORAN para llevar a cabo el mismo procedimiento. Una vez hallada la nueva diferencia de tiempos, sobre la
carta de navegación, podrá buscarse otra línea hiperbólica, correspondiente al grupo últimamente sintonizado, que
este de acuerdo con la diferencia de tiempos determinada por el receptor de a bordo.
El equipo LORAN consiste en un receptor de baja y media frecuencia y una pantalla de rayos catódicos
en la cual aparecen una serie de líneas producidas por la recepción en el avión de las ondas lanzadas desde tierra.
Con una plantilla especial se mide la diferencia de tiempos ente las señales representadas en la pantalla. 4
3 4
, FORSSELL, BÖRJE: Radionavigation systems. Prentice Hall 1991.
TETLEY, L., CALCUTT, D.: Electronic Aids to navigation. Edward.
- 10 -
1.2.1.5.
SISTEMA ADF
Uno de los sistemas de radio navegación mas antiguos es el ADF (Automatic Direction Finder) por el
nombre de su equipo en tierra NDB.
Su funcionamiento se basa en la determinación de la dirección de llegada de las ondas de radio emitidas
desde el radio faro ubicado en tierra NDB. El concepto básico de radio compás es el de un indicador en el
instrumento de cabina que apunta hacia la estación y muestra así la posición de la punta del avión con las
estación. Esta relación se conoce como marcación relativa.
Independientemente del rumbo del avión, la aguja indicadora mostrara la marcación relativa. El indicador
del NDB estará centrado cuando el avión se encuentre sobre el radial seleccionado, pero independientemente del
rumbo. La aguja del ADF estará en el centro solamente cuando la estación este justo enfrente de la cabina del
avión. De esta forma, lo fundamental de esta radio ayuda, es que proporciona información sobre la dirección en
que se encuentra la estación.
El ADF constituye un apoyo a la navegación de sistemas que operan en VHF, y por lo tanto, podrá usarse
cuando este tipo de navegación basada en onda de alcance visual no es posible. El radio compás al trabajar en las
bandas LF y M F recibe las señales emitidas por los NDB en ondas de tierra.
Este equipo se usa para la identificación de posición, para recibir comunicaciones en baja y media
frecuencia, seguimiento de las rutas magnéticas y como procedimiento de aproximación instrumental de no
rescisión.
La composición del equipo consta de dos partes bien definidas:
o
Equipo de tierra: NDB
o
Equipo de abordo: ADF
El equipo de tierra es un transmisor convencional MF que funciona a una frecuencia en la banda de 200
Khz. a 500 Khz., que emite una portadora interrumpida modulada en intervalos regulares por un tono que da el
indicativo de la radiobaliza en el código de MORSE.
El equipo de abordo consta de 4 componentes
o
Sistemas de antenas
o
Receptor
o
Servoamplificador
o
Indicador
ANTENAS: las antenas típicas varían desde antenas en “T” de 25 m de altura y 50 m de longitud para
radiofaros de largo alcance, a torres de 10 m aisladas de tierra y antenas “whip” que varían de 10 a 20 m de
longitud. Los parámetros que afectan el rendimiento de un sistema de antenas cortas es el sistema de puesta a
tierra. Las antenas cortas presentan una resistencia a la radiación extremadamente baja. La resistencia de tierra
depende de la extensión del sistema de puesta a tierra, la naturaleza y humedad del suelo. La antena de sentido
consiste en despejar el error de ambigüedad que tiene la antena loop.
Esta antena puede instalarse tanto en el interior como en el exterior de la aeronave. Si va colocado en el
exterior, dicha antena va desde un aislante en la cabina hasta el estabilizador vertical de cola. Cuando las señales
de la antena loop y la antena de sentido se suman, resulta que una de las posiciones de nulo de la primera
desaparece. Queda pues, solo una posición nula que indicara el sentido de la estación emisora. Se ha logrado con
esta suma la determinación de la dirección y el sentido en el que se encuentra la estación de tierra.
RECEPTOR: es el equipo capaz de transformar la energía electromagnética recibida, en energía eléctrica,
cuya amplitud esta en función de la posición relativa de la antena receptora respecto de la trayectoria de
- 11 -
propagación del campo electromagnético procedente del transmisor de tierra, que va instalado en uno de los
paneles de la cabina y debe ser de fácil acceso.
SERVOAMPLIFICADOR: consiste en un amplificador de impulsos eléctricos que le llegan y transmitirlos
a los indicadores. De esta manera, la aguja indicadora ya es sensible a las señales eléctricas que recibe.
INDICADORES: existen dos tipos de indicadores de radiocompás: el de carta fija y el de carta móvil o
RMI. Ambos son accionados por el mecanismo transmisor y muestran la posición angular de la antena loop en
relación con el eje longitudinal del avión. El indicador de carta fija es una rosa graduada en 360° con señales para
las divisiones de 5 y 10°.
Los rumbos cuadrantes se representan por el símbolo del punto cardinal. El índice de 90° vendrá señalado
por la lectura correspondiente a 180 por la letra S, el de 270 por la letra W y el de 360 por la letra N. 5
1.2.1.6.
SISTEMA INERCIAL (INS)
Este es un sistema de navegación autónomo, que se basa su funcionamiento en las fuerzas de inercia,
dando constantemente información de posición del avión y parámetros tales como TAS, rumbo, deriva y
velocidad del viento entre otros.
Todo el proceso se realiza a través de una plataforma inercial sensible a los movimientos del avión con
respecto a la superficie terrestre. Esta plataforma, o unidad de referencia inercial, envía información a un
computador que la presenta en los instrumentos de navegación.
Los elementos básicos son:
o
Unidad de navegación (UN): la navegación e infamación de actitud del avión se lleva a
cabo por medio del UN , que a su vez puede subdividirse en :
1. Unidad de referencia inercial
2. Unidad electrónica de referencia inercial
3. Unidad computadora electrónica
1.2.1.7.
o
Unidad selectora de modos (MSU): el modo de operación del sistema inercial, se selecta a
través del MSU.
o
Unidad de control (CDU): la unidad de control esta compuesta por un teclado, visor
digital y un selector de información que proporciona datos como alíneación, navegación,
sistema operacional, etc.
o
Unidad de baterías (BU): alimentan al sistema en caso de fallo de las fuentes primarias de
energía. 6
SISTEMA OMEGA
Este es un sistema radioeléctrico de navegación englobado en el área de navegación y que por
consiguiente disfruta de sus ventajas. Aunque NO ES UN SISTEMA autónomo como en INS, sus caracteres
operacionales son muy parecidos.
El equipo de abordo esta constituido por las antenas, la calculadora de navegación y los indicadores,
siendo estos dos últimos componentes similares a los usados por el sistema inercial.
El equipo de tierra consta de una red de 9 estaciones transmisoras distribuidas de tal manera, que puedan
proporcionar una señal de cobertura mundial.
5 6
, FORSSELL, BÖRJE: Radionavigation systems. Prentice Hall 1991.
TETLEY, L., CALCUTT, D.: Electronic Aids to navigation. Edward.
- 12 -
Estas estaciones transmiten una señal de fase estable en la banda de VLF, a causa de la baja frecuencia de
la emisión, las señales tienen un alcance de miles de kilómetros.
Las nueve estaciones están situadas en
•
Transmisor Omega Bratland: Noruega, desmantelada en 2002.
•
Transmisor Omega Trinidad: Trinidad, aún permanecería en pié.
•
Transmisor Omega Paynesville: Liberia, aún de pié y que llegó a ser la estructura más alta de
África con 417 metros de altura, cesó su servicio en 1997.
•
Transmisor Omega Kaneohe: Hawai, inaugurada en 1943 como un transmisor en VLF para
comunicaciones submarinas y usaba como antena un cable que se extendía sobre el valle Haiku. A
finales de los 60 se transformaron en un transmisor para el sistema de navegación OMEGA.
•
Transmisor Omega La Moure: North Dakota, USA. Usaba una antena de 365 metros. Desde que
dejó de funcionar el sistema de navegación OMEGA se usa para transmisiones submarinas en la
banda VLF.
•
Transmisor Omega Chabrier: Isla Réunion. Con un mástil de 428 metros de altura. El mismo fue
demolido en 1999 con explosivos.
•
Transmisor Omega Trelew: Chubut, Argentina. Usaba una antena de 450 metros de alta y fue
demolida usando dinamita el 23 de Junio de 1998 dando por finalizado el sistema de navegación
Omega.
•
Transmisor Omega Woodside: Australia. Con una altura de 432 metros es una de las
construcciones más alta del hemisferio sur. Su construcción original estaba planeada en Nueva
Zelanda pero diversas protestas allí hicieron que su construcción se trasladara a Australia.
•
Transmisor Omega Tsushuima: Japón. Alcanzaba los 383 metros y fue desmantelada en 1998.
Cada estación transmite en cuatro frecuencias básicas de navegación consecutivamente: 10,2 Khz., 11,3
Khz. y 13,6 Khz. Esta transmisión en cuatro frecuencias previene la interferencia de señales entre las estaciones, y
esta programada de tal modo que durante cada intervalo en la transmisión de una estación, solo otras tres están
emitiendo cada una en distinta frecuencia.
1.2.1.7.1.
USO OPERACIONAL DEL OMEGA
La red Omega de estaciones proporciona señales para la navegación con una exactitud de ± 2 NM
dependiendo del grado de sensibilidad del equipo receptor - procesador de a bordo (computadora de navegación).
Como ya se ha dicho, esta es muy similar a la usada por el sistema inercial. Mediante la sintonización de las
estaciones de tierra, el equipo de abordo puede llevar al avión a cualquier posición que haya programada el piloto
en forma de coordenadas geográficas. La presentación de las rutas a seguir se hace en instrumentos indicadores,
siendo el más usado para ello el HSI.
Las radio señales de las estaciones Omega pueden ser afectadas por algunas variables que pueden influir
en la fidelidad de las mismas. Estas variables incluyen la variación de la velocidad de la fase de la señal durante el
día, la absorción de las capas atmosféricas polares y las perturbaciones ionosféricas propiciadas por la actividad
solar. Así como la variación diurna de la fase puede ser compensada por el equipo de a bordo, un exceso de
actividad solar y su efecto sobre la propagación de las señales del Omega, no tienen corrección posible.
Cuando se detecta una alteración en la ionosfera, los organismos apropiados se encargan de hacerlo
conocer a través de los correspondientes Notam. A los 16 minutos después de cada hora una estación preparada a
tal efecto en USA, emite información acerca del estado operacional de cada una de las estaciones OMEGA. A los
47 minutos después de cada hora, la estación OMEGA de Hawai emite una información similar. 7
1.2.1.8.
SISTEMA DOPPLER
7
FORSSELL, BÖRJE: Radionavigation systems. Prentice Hall 1991.
TETLEY, L., CALCUTT, D.: Electronic Aids to navigation. Edward.
- 13 -
1.2.1.8.1.
INTRODUCCIÓN HISTÓRICA
El primer sistema de radionavegación por satélite, conocido como TRANSIT, fue desarrollado tras el
lanzamiento del primer satélite al espacio, el llamado Spútnik I lanzado el 4 de octubre de 1957 por la Unión
Soviética tras el programa Spútnik, dando comienzo a la era espacial.
Este sistema nació gracias a un diseño de la universidad John Hopkins para la US Navy en 1958,
sirviendo de ayuda a la navegación de navíos y submarinos atómicos.
Los primeros satélites de este sistema se lanzan a principio de la década de los ’60 y a partir de 1964 el
sistema estaba completamente operativo para las fuerzas de la OTAN. El principal objetivo de TRANSIT era, al
igual que para los sistema OMEGA y LORAN, de tipo militar, como ya se menciono orientados a la localización
de submarinos. Mas tarde, en 1967, comienza a usarse en el ámbito civil con aplicaciones muy limitadas, como en
la utilización de tipo geodésico para la medición de redes geodésicas, y otras aplicaciones científicas y
tecnológicas.
TRANSIT se basaba en el efecto Doppler que consistía en un conjunto de 4 a 7 satélites de baja orbita
(1074 Km.) y periodo de 107 minutos, que viajaban en trayectorias conocidas y emitían señales en dos
frecuencias conocidas (150MHz y 400MHz), estas señales recibidas se diferenciaban levemente con las
efemérides del satélite con respecto al receptor. Monitorizando este cambio de frecuencia a intervalos cortos, el
receptor puede determinar su localización a un lado o al otro del satélite, la combinación de varias de estas
medidas, unido a un conocimiento exacto de la órbita del satélite pueden fijar una posición concreta y en sus
aplicaciones que se generaban en dos dimensiones lograban una precisión de 25m 8. A diferencia de OMEGA y
LORAN que utilizaban para determinar la posición a partir de medidas Doppler.
Tal configuración conseguía una cobertura mundial pero no constante. La posibilidad de posicionarse era
intermitente, pudiéndose acceder a los satélites cada 1.5 h. El cálculo de la posición requería estar siguiendo al
satélite durante quince minutos continuamente.
Su seguimiento lo hacía el NAV (Grupo Naval de Astronáutica) que recibe datos orbitales por las
observaciones de cuatro estaciones de control. Dos veces al día tras la recepción de datos, transmite y almacena en
la memoria de cada satélite las efemérides, que a su vez son retransmitidas por éste cada dos minutos a los
usuarios.
Se pueden considerar los siguientes errores en la observación a satélites Doppler:
•
Efectos de propagación no corregidos (capas ionosférica y troposférica no consideradas): 1-5
metros.
•
Instrumentación (fase del movimiento del oscilador): 1-6 metros.
•
Incertidumbre en el modelo geopotencial utilizado: 5-10 metros.
•
Fuerzas superficiales modeladas incorrectamente (crecimiento secular del error debido al período
incorrecto, arrastre, precisión de la radiación).
•
Efectos UTI-UTC no modulados. Coordenadas polares incorrectas: 1 metro.
•
Error redondeado de efemérides: 5 metros
•
Se producían huecos en las observaciones muy grandes debido a la configuración y al número
recibido de satélites de la constelación.
Sumando un error total entre 12 y 28 metros.
Este sistema ha sido crucial para el desarrollo de la Geodesia mundial.
8
Misra y Enge, 2001
- 14 -
La entonces URSS tenía un sistema igual que el Transit, de nombre TSICADA. Había que dar un gran
salto. La guerra fría fomentaba invertir unos cuantos billones de dólares en un revolucionario sistema de
navegación, que dejara a la URSS definitivamente atrás.
Estuvo funcionando hasta el año 1996. Su salida de operación se debió fundamentalmente a que un nuevo
sistema estaba operando exitosamente, superando importantes deficiencias que caracterizaban a su predecesor.
1.2.1.8.2.
MÉTODOS DOPPLER DE OBSERVACIÓN POR SATÉLITE
Hay varios métodos para el establecimiento de puntos de control por medio de observaciones Doppler de
satélite. El método más adecuado a utilizarse en un proyecto específico, depende de un gran número de factores.
1.2.1.9.
MÉTODO DEL PUNTO AISLADO
Este método permite operaciones independientes de recepción y reducción de datos. Se provee al usuario
posiciones de satélite (efemérides) basadas en datos de rastreo. Las posiciones computadas por el usuario
dependen de:
•
tipo de efemérides
•
el modelo matemático utilizado
•
uso de datos meteorológicos superficiales
•
número de pasos observados
•
parámetros para edición de datos
1.2.1.10.
MÉTODO DE TRANSLOCACIÓN
Los efectos de los errores de efemérides y de refracción, están correlacionados entre estaciones rastreando
un paso de satélite simultáneamente. “Translocación” son las técnicas que aprovechan esta correlación para
mejorar la precisión. Se distingue entre:
•
Translocación rigurosa: Se refiere a métodos en los cuales puntos comunes de datos provenientes
de pasos rastreados simultáneamente en todas las estaciones, son utilizados en la reducción de
datos.
•
Translocación: Se refiere a los métodos en los cuales se operan los receptores simultáneamente,
aunque todos los datos de los puntos y los pasos, pueden no corresponder exactamente.
Al igual que la ubicación de puntos, la translocación, requiere que las efemérides del satélite sean
suministradas externamente y no deducidas solamente de observaciones.
1.2.1.11.
MÉTODO DEL ARCO CORTO
Para reducir aún más el efecto de errores en las efemérides suministradas, el usuario puede utilizar en su
“programa” para reducción, un modelo matemático que genera sus efemérides internamente, utilizando un modelo
gravimétrico truncado y da a las efemérides seis o más grados de libertad. Los datos están involucrados, pero el
método tiene ventajas notables para más de una estación, en que matrices rigurosas de varianza-covarianza
pueden calcularse (y por lo tanto, las precisiones relativas).
1.2.1.12.
MÉTODO DEL ARCO SEMICORTO
Esta técnica difiere del método arco corto, en que se utilizan órbitas generadas externamente y las
efemérides se dan entre uno y seis grados de libertad. Utilizando el mismo número de parámetros para modelación
de errores orbitales y observacionales, tanto el método del arco corto como el de arco semicorto debe tener el
mismo resultado para un mismo juego de datos. Sin embargo, puesto que las órbitas externas están generadas con
modelos gravimétricos complejos y se requiere una sola iteración, la solución del arco semicorto con las
efemérides precisa con seis grados de libertad, debe ser ligeramente superior.
- 15 -
1.3.
HISTORIA DEL GNSS.
Como se ha mencionado, se entiende por GNSS al conjunto de sistemas de navegación por satélite, como
son el GPS, GLONASS, el reciente GALILEO, y los futuros BEIDOU, IRNSS y QZSS. Es decir, los sistemas que
son capaces de dotar en cualquier punto y momento, de posicionamiento espacial y temporal.
Sin embargo, el concepto de GNSS es relativamente reciente, puesto que su historia comienza en la
década del 70 con el desarrollo del sistema estadounidense GPS, que tuvo en sus orígenes aplicaciones
exclusivamente militares, y su cobertura a pesar de ser mundial, no era, como hoy se entiende “Global”, es decir,
era un sistema de uso exclusivamente militar cuyo control estaba bajo el DoD (Department of Defense) de los
Estados Unidos, y sometido a un estricto control gubernamental.
No es hasta que se empiezan a tener en cuenta sus aplicaciones civiles, cuando el Gobierno de los Estados
Unidos encarga realizar diversos estudios a distintas agencias como RAND, con el propósito de analizar la
conveniencia de emplear esta tecnología con fines civiles.
Así pues, tras diversos estudios, es en los noventa, a partir de la segunda mitad, cuando esta tecnología
comienza a emplearse con fines civiles, y a alcanzarse númerosos acuerdos entre el Gobierno Estadounidense y
distintos países de todo el mundo. Siendo el GPS hasta el momento el único sistema de navegación por satélite
plenamente operativo, y debido a que el gobierno ruso decide no seguir adelante con GLONASS, los
estadounidenses tienen en este período el control de los sistemas de posicionamiento con sus satélites. Con el
segmento espacial (red de satélites) perteneciente de manera exclusiva a los EEUU, el resto de países, como
Japón, Australia, y el continente europeo, se centran en el desarrollo del segmento de tierra, es decir, de los
centros de control y recepción de las señales GPS, y de elaborar sistemas de aumento (SBAS y GBAS) para dicha
tecnología, que les permitan obtener un posicionamiento más preciso a través de distintos métodos que veremos
más adelante.
Esto plantea inquietudes a nivel internacional, ya que, la capacidad que tienen los EEUU para emitir la
señal civil del GPS es también la misma para distorsionarla o dejar de emitirla en caso de guerra o conflictos entre
países (lo que se entiende como disponibilidad selectiva), surge así la necesidad para los demás países de tener su
propio sistema de navegación por satélite, que les permita de manera autónoma disponer de esta tecnología sin
dependencia de los EEUU.
Queda pues, un largo camino por recorrer para el resto de países en el desarrollo de nuevos sistemas de
navegación por satélite. Europa plantea Galileo como sistema con un uso exclusivamente civil, si bien los
gobiernos de los distintos países podrán emplearlo también con fines militares. Rusia relanza el proyecto
GLONASS y otros países como China plantean el desarrollo de sistemas experimentales como COMPASS, la
India IRNSS y Japón QZSS como sistemas regionales.
Si el GNSS plantea un futuro lleno de posibilidades, primero han de resolverse multitud de cuestiones,
como capacidades de los nuevos sistemas, interoperabilidad con el GPS o costos entre otras cosas. Factores que
implican a multitud de organizaciones, como agencias espaciales encargadas del desarrollo del sistema, gobiernos
y otras agencias nacionales e internacionales encargadas de cuestiones legislativas. Han proliferado en multitud de
países agencias, publicaciones, asociaciones de GNSS con el fin de proponer aplicaciones, soluciones y acuerdos
así como educar sobre esta tecnología, debido en parte a su prometedor futuro, y en parte a su complejo entorno
internacional.
Se ha establecido ya un marco para definir qué características debe tener un sistema GNSS a estas alturas,
ya que si bien el primero fue el GPS, su evolución así como el resto de sistemas que surjan en otros países deben
tener una estructura básica muy similar, para garantizar la interoperabilidad y las características entre distintos
GNSS.
- 16 -
CAPITULO 2
SISTEMAS EXISTENTES Y SU EVOLUCIÓN: GNSS-1 Y GNSS-2
2.1. INTRODUCCIÓN
En este capítulo se desarrollan los sistemas existentes en la actualidad, es decir las implementaciones
reales de la tecnología estudiada en el capítulo 1. Primero, presentaremos los sistemas existentes y futuros.
Después desarrollaremos tres casos:
GPS y GLONASS, como sistemas de primera generación, y Galileo como sistema de nueva generación.
El orden en que vamos a abordar el estudio de cada sistema, es el siguiente:
•
Historia: Evolución desde su concepción hasta su estado actual, estudiando los motivos políticos
por los que surge cada sistema, así como las organizaciones implicadas en cada caso.
•
Estado actual: aquí se revisa de forma general la composición del segmento espacial (lanzamiento
y características orbitales de los satélites, tipos de satélites), y del segmento de Tierra (localización
y funcionamiento).
•
Servicios: que servicios presta cada sistema hoy día, en cuanto a las prestaciones que ofrece y bajo
que condiciones.
El objetivo de este capítulo es adquirir los conocimientos generales en cuanto a historia, composición y
servicios ofrecidos por los distintos sistemas en la actualidad, de tal forma que se complemente con el capítulo 1,
estudiando con casos prácticos los puntos 1.1, 1.2, 1.3, 1.4.
2.2. SISTEMAS GNSS
El hecho de que EEUU tuviera el monopolio del segmento espacial, hace que el resto de los países del
mundo dependientes de su sistema.
Mientras en una primera fase los países se centran en el desarrollo de sistemas de aumento (SBAS,
GBAS, ABAS). Debido a la importancia que empieza a cobrar esta tecnología tanto por el número de posibles
aplicaciones, como por el mercado que genera, se produce una segunda fase, liderada por Europa en la que se opta
por desarrollar un segmento espacial propio que acabe con la dependencia del sistema estadounidense.
Esto se resume en la Figura 2.1, en la que muestra un esquema de los distintos sistemas:
•
GNSS-1: formado por el GPS y GLONASS actuales, junto con los sistemas de aumento que han
surgido: SBAS, GBAS, ABAS.
•
GNSS-2: formado por el nuevo sistema GALILEO y las actualizaciones de los actuales GPS y
GLONASS.
- 17 -
GNSS
GNSS 1
GPS
GNSS 2
GLONASS
SISTEMAS
DE AUMENTO
GPS 2F
GLONASS K
GALILEO
ABAS
GBAS
SBAS
Figura 2.1: Esquema GNSS
2.2.1. SISTEMA DE AUMENTO BASADO EN AERONAVES: ABAS
El sistema ABAS (Aircraft Based Augmentation System) son sistemas que emplean más de 4 satélites para
calcular la posición, de esta forma son capaces de detectar fallos en el envío de información.
En la actualidad se emplean dos sistemas:
•
Sistema Monitor de Integridad Autónoma del Receptor (RAIM): por un lado detecta fallos
calculando su posición con la combinación de 4 satélites sobre 5 o 6 visibles, así sabemos cual es
el satélite defectuoso. Por otro, la aeronave puede ahora actuar como otro satélite debido a su
altitud ya que conoce su posición.
•
Sistema de Identificación y Exclusión de Fallas (FDE): esta funcionalidad permite descartar el
satélite defectuoso para seguir empleando el GNSS de forma normal. Se encuentra en la mayoría
de las aeronaves que se desarrollan en la actualidad.
2.2.2.
SISTEMA DE AUMENTO BASADO EN TIERRA: GBAS
El sistema GBAS (Ground Based Augmentation System) nace con el fin de dotar de mayor precisión al
GPS y GLONASS para el tráfico aéreo. Los sistemas GBAS se diferencian de los SBAS en que ellos no dependen
de los satélites Geoestacionarios (GEO), debido a que el GBAS no esta diseñado para brindar su servicio sobre
amplias regiones geográficas, se emplea en distancias cortas, por lo que es un LAAS, que es el nombre que le ha
dado la FAA11 a su GBAS.
El funcionamiento es sencillo, el GBAS vigila las señales GPS ó GLONASS en un aeropuerto y transmite
correcciones diferenciales de distancia, mensajes de integridad locales y datos de aproximación directamente al
receptor de a bordo mediante una radiodifusión de datos VHF (VDB).
- 18 -
Figura 2.2: Esquema de funcionamiento de bases de tierra GBAS
2.2.2.1.
SISTEMA DE AUMENTACIÓN REGIONAL BASADA EN TIERRA (GRAS)
El GRAS (Ground based Regional Augmentation System) tiene como base al GBAS y consiste en una
serie de estaciones GBAS desplegadas en un área extensa (incluso continental) interconectadas entre sí por
sistemas de telecomunicaciones, permitiendo contar con una aumentación SBAS de carácter regional. Australia es
el país más avanzado en estos momentos en el desarrollo e implementación de este tipo de sistemas.
2.2.3.
SISTEMA DE AUMENTO BASADO EN SATÉLITES: SBAS
Se conoce como SBAS (Satellite Based Augmentation System), al conjunto de sistemas de aumento
desarrollados por distintos países que se basan en el uso de satélites geoestacionarios para mejorar las prestaciones
de los actuales GNSS.
En la Figura 2.3 podemos observar por su distribución geográfica los SBAS que existen en la actualidad.
Son sistemas que poseen una amplia cobertura y que por tanto tratan de mejorar en esas zonas las prestaciones del
servicio de GNSS.
Entre las funciones de mejora que ofrecen dichos sistemas destacamos:
•
Aumentar la precisión de GPS y GLONASS: mientras que estos sistemas tienen una precisión de
unos 20-70 metros, los SBAS ofrecen una precisión de entre 1 y 10 metros, variando de un sistema
a otro.
•
Incrementar la integridad del sistema informando de posibles fallos en satélites con mayor rapidez.
Mientras que el GPS puede tardar 15 minutos para aplicaciones críticas, los actuales sistemas
civiles requieren entre 6 y 30 segundos de retardo para informar de un fallo. Los SBAS alcanzan
este requisito, siendo así imprescindibles para ciertas aplicaciones.
•
Incrementar la disponibilidad. Actualmente el GPS tiene una disponibilidad del 95-98%, mientras
que sistemas como el EGNOS tienen una disponibilidad de hasta el 99.97%.
Las otras prestaciones que son la cobertura, quedan limitadas a la región del sistema de aumento, y la
continuidad de servicio depende del propio sistema GPS o GLONASS, estando fuera de control para estos
sistemas.
- 19 -
Figura 2.3: Cobertura mundial de los Sistemas de Aumentación SBAS.
La arquitectura básica de todos los sistemas SBAS esta conformado por:
•
Segmento terrestre: una red de estaciones terrestres de referencia distribuidas por una amplia zona
geográfica que monitorean a los satélites GNSS.
•
Segmento espacial: formado por varios satélites GEO. El funcionamiento es sencillo, el segmento
de tierra retransmite los datos a una instalación de procesamiento central en donde se evalúa la
validez de las señales y se calcula correcciones a los datos de efemérides y reloj radiodifundidos de
cada satélite. Para cada satélite GPS o GLONASS vigilado, el SBAS estima los errores en los
parámetros, y a su vez aplica las correcciones, que serán transmitidas a los satélites GEO y este las
transmitirá a los receptores GNSS.
2.2.3.1.
SISTEMA DE AUMENTO WASS
WAAS (Wide Area Augmentation System) es un Sistema de Aumentación
Basado en Satélites desarrollado por Estados Unidos. Está ideado como un
complemento para la red GPS para proporcionar una mayor precisión y seguridad en
las señales, permitiendo una precisión en la posición menor de dos metros.
2.2.3.1.1.
ELEMENTO DEL SISTEMA WASS
El sistema consta de 59 estaciones de vigilancia, llamadas estaciones de referencia de área amplia o WRS
(Widearea Reference Stations) , 2 estaciones maestras o WMS (Wide-area Master Stations), 6 antenas para la
retransmisión de datos GES (Ground Earth Stations) y 3 satélites geoestacionarios.
Las 24 estaciones de vigilancia están instaladas con aproximadamente 800 kilómetros de separación a lo
largo de los Estados Unidos, Alaska, Hawai y Puerto Rico.
2.2.3.1.2.
ESTACIONES DE REFERENCIA DE AREA AMPLIA (WRS)
Este sistema usa estaciones de referencia esparcidas con aproximadamente 500 a 1000 Km. de separación
a lo largo de la región a cubrir. La separación de las estaciones influirá en el grado de precisión del sistema
WAAS. Esto se corresponde de alguna manera con las estaciones de corrección diferenciales del
sistema DGPS marino de los Guardacostas de los Estados Unidos, pero no transmiten las señales de corrección
ellas mismas. Lo que hacen es observar las señales GPS, las condiciones ionosféricas y la señal de corrección
WAAS y transmitir los datos a las estaciones maestras. Cada una de las estaciones bases estará compuesta por una
unidad principal y dos de reserva para dar un alto grado de fiabilidad por medio de la redundancia.
- 20 -
Todas las estaciones WRS contienen al menos un receptor de frecuencia dual (L1 y L2) conectado a
un oscilador de cesio, (reloj de gran precisión), un sensor meteorológico, un procesador y hardware de red para
transmisión de datos ethernet hacia las estaciones maestras.
2.2.3.1.3.
ESTACIONES MAESTRAS DE ÁREA AMPLIA (WMS)
Las estaciones maestras del sistema WAAS toman los datos de las estaciones de referencia (WRS),
verifican las señales de corrección anteriores y generan una nueva señal de corrección WAAS. Esta señal de
corrección es transmitida a través de las estaciones terrestres a los satélites geoestacionarios, como los
de Inmarsat o satélites exclusivos, para ser enviadas a los receptores.
La WMS es responsable por filtrar todas las observaciones GPS hechas desde los receptores de referencia,
estimando los estados de los modelos de error tanto ionosférico, de reloj, efemérides, etc. y calculando
estimaciones y generando finalmente los mensajes WAAS (trama de 250 bit) que serán enviados y aplicados a los
cálculos del seudorange hechos en los receptores WAAS a bordo de las aeronaves. Las estaciones de referencia
también mostraran información de estatus de la constelación de satélites GPS al operador.
2.2.3.1.4.
ESTACIONES DE COMUNICACIONES (GES)
Son estaciones terrestres encargadas de recibir los mensajes WAAS de corrección de la WMS y
retransmitirla a los satélites geoestacionarios, los que a su vez transmitirán las correcciones hacia los receptores
WAAS.
2.2.3.1.5. SATÉLITES GEOESTACIONARIOS
Los satélites geoestacionarios transmiten la señal de corrección en la banda de frecuencia L1 del GPS,
pero usan un código seudo-aleatorio (PRC) diferente al de los satélites GPS. Las antenas receptoras del WAAS
podrían aparentemente ser incorporadas directamente en el receptor GPS.
Debido a que el sistema debe brindar integridad, disponibilidad, continuidad y precisión sé esta pensando
en el uso de satélites geoestacionarios de uso exclusivo para este sistema, estos satélites además de transmitir las
correcciones en radiodifusión, también realizarán funciones de satélites GPS geoestacionarios, garantizando
contar con el mínimo número de satélites las 24 horas del día, para esto se planea usar otra banda de frecuencia
como la L5 para evitar la interferencia con la constelación de 24 satélites no estacionarios del GPS.
2.2.3.1.6.
RECEPTORES DEL WAAS
Son equipos receptores GPS con la capacidad de poder recibir la información de corrección WAAS de los
satélites geoestacionarios del sistema WAAS. Las correcciones WAAS (mensajes de 250 bits) recibidas serán
aplicados a los resultados de los cálculos de la seudodistancia para luego determinar la posición GPS.
2.2.3.2.
SISTEMA DE AUMENTO SDMC
Es el sistema de corrección y control diferencial Ruso y tiene como tareas la monitorización de las
aeronaves resolviendo el problema de la estimación de la calidad de funcionamiento del sistema de navegación
espacial (SNS), GLONASS y GPS.
El termino “vigilancia de la integridad” se refiere a la observación de los parámetros del sistema e
informar a los usuarios sobre los problemas de funcionamiento anormal. El sistema lleva a cabo en línea y a
posteriori
2.2.3.2.1.
ESTRUCTURA SDMC 9
El sistema de vigilancia de la integridad en los campos de la navegación se compone de los siguientes
componentes:
9
sdcm.ru
- 21 -
•
Los puntos de control (MP)
•
El centro de vigilancia a nivel mundial (CGM)
•
Los enlaces de comunicación entre los puntos de control y el centro de vigilancia mundial
2.2.3.3.
SISTEMA DE AUMENTO EGNOS
El sistema EGNOS (European Geostationary Navigation Overlay Service) es un Sistema de Aumentación
Basado en Satélites desarrollado por la Agencia Espacial Europea (ESA), la Comisión Europea (institución de
la Unión Europea) y Eurocontrol. Está ideado como un complemento para las redes GPS y GLONASS para
proporcionar una mayor precisión y seguridad en las señales, permitiendo una precisión inferior a dos metros.
Consiste en una red de tres satélites geoestacionarios y en una red de estaciones terrestres encargadas de
monitorizar los errores en las señales de GPS y actualizar los mensajes de corrección enviados por EGNOS.
El sistema empezó a emitir de formal operacional en julio de 2005 mostrando unas prestaciones
excelentes en términos de precisión y disponibilidad. El inicio oficial de operaciones fue anunciado por
la Comisión Europea para el 1 de octubre de 2009. El sistema debería ser cualificado para su uso en aplicaciones
de seguridad en el año 2010 por la Agencia de supervisión GNSS (GNSS Supervisory Agency).
2.2.3.3.1.
ELEMENTOS DEL SISTEMA EGNOS
El sistema EGNOS está compuesto por 34 Estaciones de Referencia (figura 2.4) y de Supervisión de
Integridad (RIMS) desplegadas para supervisar los satélites de las constelaciones GNSS. Cada satélite tiene que
ser supervisado por múltiples RIMS antes de que se generen las correcciones y los mensajes de integridad.
Figura 2.4: Estaciones de referencia de EGNOS.
Existen cuatro Centros de Control de Misión (MCC), que procesan los datos de las RIMS para generar las
correcciones WAD (Wide Aérea Differential) y mensajes de integridad para cada satélite. Solo uno de estos
MCCs está activo y operacional, los otros MCCs permanecen como "reserva" que pueden activarse si ocurre
algún problema.
Las Estaciones Terrestres de Navegación (Navigation Land Earth Stations, NLES) transmiten los
mensajes de corrección e integridad desde el MCC a los satélites geoestacionarios, encargados de radiar
- 22 -
finalmente la señal SBAS a los usuarios finales. El sistema desplegará dos NLES (una principal y una de reserva),
y una tercera NLES con fines de pruebas y validación.
El sector espacial de EGNOS está compuesto por tres satélites geoestacionarios con cobertura global
terrestre: dos satélites Inmarsat-3 (AOR-E e IOR), así como el satélite ESA Artemis. Los usuarios EGNOS
pueden rastrear dos satélites geoestacionarios por lo menos.
2.2.3.4.
SISTEMA DE AUMENTO MSAS
El sistema MSAS (Multi-functional Satellite Augmentation System) es un sistema de aumentación basado
en el satélite multifuncional MTSAT, este es un sistema de navegación por satélite, el cual soporta DGPS,
designado para mejorar la precisión de la señal del sistema GPS. Este sistema esta operativo en Asia,
principalmente en Japón.
En paralelo con el sistema WAAS de Estados Unidos y el EGNOS de Europa, Japón ha desarrollado este
sistema basado en un satélite geoestacionario de transporte multifuncional (MTSAT), el cual tiene también una
función meteorológica (además de la aeronáutica). El MTSAT-1 (figura 2.5) fue lanzado en el año 2000, y
subsecuentes lanzamientos son programados cada cinco años.
Aunque el sistema de software del MSAS está basado en el WAAS presenta diferentes capacidades que
los sistemas WAAS y del EGNOS, porque incluye dos modos de comunicación, voz y datos. Esta capacidad de
comunicación será usada para brindar Vigilancia Automática Dependiente (ADS). Específicamente, MSAS esta
basado en el concepto FANS de la OACI, incluyendo GNSS para navegación y Servicio Satelital Móvil
Aeronáutico (AMSS) para dos modos voz/datos con ADS.
Figura 2.5: Representación del satélite MTSAT-1.
La aplicación aeronáutica consistía en dos funciones: servicio móvil aeronáutico por satélite (SMAS) y
sistema de aumentación basado en satélite (SBAS) del GNSS para proporcionar a las aeronaves información sobre
aumentación GPS por enlace ascendiente a partir de las instalaciones terrestres. La función MSAS del MTSAT
cumpliría plenamente con las normas y métodos recomendados (SARPS) de la OACI. Los detalles técnicos no
especificados en los SARPS se coordinaron mediante las actividades del Grupo Técnico de Trabajo sobre
funcionamiento (IWG) SBAS. Así, el MSAS permitía el pleno funcionamiento convidado con otros
servicios SBAS.
Después de haber fallado el lanzamiento del MTSAT-1 (el primer MTSAT), Japón adquirió otro satélite,
MTSAT-1R, que se lanzaría a principios de 2004. El segundo MTSAT, MTSAT-2, se lanzó en 2005. Una vez
finalizada la certificación, el MSAS entraría en servicio y sería operacional utilizando únicamente el MTSAT-1R
a partir de este año. El doble funcionamiento del MTSAT-1R y el MSAT-2 entró en servicio en el año 2006.
2.2.3.4.1.
ELEMENTOS DEL SISTEMA MSAS
Dos centros de satélites aeronáuticos se encargarán del control de los MTSAT. Las estaciones de control
principales (MCS) del MSAS se han instalado en dos centros de satélites aeronáuticos. Con objeto de
proporcionar servicio MSAS en la FIR (Región de Información de Vuelo) del Japón, se habían instalado
- 23 -
estaciones de vigilancia de tierra (GMS) en cuatro centros de control de tránsito en rutas aéreas. Para garantizar
una referencia amplia para una determinación exacta de la órbita de los MTSAT se instalaron dos estaciones de
vigilancia y cronometría (MRS) en Hawai (Estados Unidos) y Camberra (Australia). Cuenta también con una
MRS en cada centro de satélites aeronáuticos.
En operaciones normales, los usuarios podrían recibir dos señales SBAS con diferentes códigos PRN.
Cada señal se enviaría por enlace ascendente de una MCS diferente y por medio de un satélite diferente. Si falla
uno de los satélites, la MCS que esté comunicando por enlace de datos por medio del satélite que haya fallado se
conmutaría al otro satélite. Así, aún en estas condiciones anormales, la aviónica del usuario podría recibir las dos
señales SBAS. Esta arquitectura garantiza un servicio SBAS sumamente redundante y fiable.
Dado que la señal MSAS sería objeto de radiodifusión por el MTSAT en la mayor parte de la
Región Asia/Pacífico, el servicio MSAS podría ampliarse fácilmente si se instalaran GMS en la zona de cobertura
del MTSAT y se conectaran líneas terrestres especializadas a las MCS. Japón ha ofrecido servicio MSAS gratuito
a los Estados de la Región Asia/Pacífico a fin de establecer en dicha región un sistema de navegación aérea fluido
y más seguro y fiable.
2.2.3.5.
SISTEMA DE AUMENTO GAGAN
GAGAN (GPS and GEO Augmented Navigation) es un Sistema de Aumentación Basado en
Satélites (SBAS) desarrollado por la Agencia India del Espacio (ISRO) y está ideado como un complemento para
la red GPS para proporcionar una mayor precisión y seguridad en las señales de posicionamiento y navegación
por satélite.
El fin es el de satisfacer los requisitos de precisión y seguridad en la navegación por satélite de
las compañías aéreas y los proveedores de servicios de tráfico aéreo (ATS) en el espacio aéreo de la India,
incluyendo el espacio del océano índico, así como amplias partes de la Región Asia/Pacífico.
GAGAN se ha diseñado para satisfacer los SARPS de la Organización de Aviación Civil
Internacional (OACI) y que permita relacionarse con WAAS, EGNOS y MSAS.
2.2.3.5.1.
FASE DE IMPLANTACION
El programa GAGAN se implantó en tres fases:
•
Sistema de demostración de tecnología (TDS). Un sistema de configuración mínima que demuestra
la capacidad del sistema para aproximaciones de precisión (Categoría I) en una región limitada del
espacio aéreo de la India y constituye una prueba del concepto. La fase TDS concluyó hacia el
año 2005.
•
Fase experimental inicial (IEP). En esta fase se amplía el TDS para abarcar todo el espacio aéreo
de la India y se añaden al sistema las redundancias necesarias. La IEP finalizó un año después de
desarrollarse el TDS.
•
Fase operacional final (FOP). Se prevé que, durante esta fase, el programa GAGAN alcance su
pleno desarrollo. El sistema sería objeto de amplios ensayos y se evaluaría respecto a
los SARPS de la OACI antes de declarar que se ha alcanzado el nivel operacional. Se prevé que
esta fase se termine un año después de la fase IEP.
Actualmente, habiendo llevado a cabo un examen detallado del diseño de la carga útil, la ISRO estaba en
la etapa de adquisición de los componentes críticos para fabricar la carga útil de navegación que se instalará en el
satélite GSAT-4, que se lanzo en 2005 en una órbita situada en 82º Este. Dado que la India está situada cerca de la
línea del ecuador terrestre, las actividades ionosféricas tendrían un efecto importante en las señales GPS recibidas
encima del espacio aéreo de la India.
Con objeto de evaluar adecuadamente el efecto de la ionosfera en las señales GPS y reducir su efecto, se
ha iniciado la elaboración de un modelo ionosférico basado en los datos compilados en gran número de
localidades durante un amplio período de tiempo. Teniendo presente lo expuesto, se preveía establecer 20
estaciones para compilar datos ionosféricos cubriendo la totalidad del país.
- 24 -
2.2.3.6.
SISTEMA DE AUMENTO SACCSA
El proyecto SACCSA (Sistema de Aumentación para el Caribe, Centro y Sudamérica) pretende analizar
la viabilidad técnica, financiera e institucional de implantación de un sistema SBAS/GNSS en las regiones
del Caribe y América del Sur. Entre otras actividades, el proyecto incluye una definición técnica de un Sistema de
Aumentación Basado en Satélites (SBAS) adaptado a las especiales circunstancias de las regiones mencionadas
(ionosfera, geografía, etc.)
2.2.3.6.1.
EVOLUCION DEL PROYECTO
La Organización de Aviación Civil Internacional (OACI) suscribió un proyecto regional de cooperación
técnica con los estados y entidades interesadas. Hasta el momento estas son Chile, Colombia, Cuba, Corporación
Centroamericana de Servicios de Navegación Aérea (COCESNA), la Unión Europea y España.
El proyecto comenzó en el año 2003 en una primera fase con el nombre de EDISA (EGNOS
Demonstrations In South America), la cual perseguía una serie de ensayos y demostraciones de la señal SBAS del
sistema europeo EGNOS, extendida a las regiones del Caribe, Centroamérica y Sudamérica.
Para ello, se desplegó una infraestructura de ensayos basada en la implantación de la señal EGNOS en la
Región CAR (Caribe) y en la zona noroeste de la Región SAM (Sudamérica), para lo cual se instalaron tres
Estaciones de Referencia y de Supervisión de Integridad (RIMS) en Colombia (Bogotá), Cuba (La Habana) y
COCESNA Honduras (Tegucigalpa). Estas estaciones se conectaron con Madrid a través del satélite Hispasat y
de ahí al ESTB (EGNOS System Test Bed). Una vez desplegada la infraestructura, se realizaron tomas de datos en
estático durante un periodo de 2,5 meses y se llevaron a efecto ensayos en vuelo.
Los datos resultantes mostraron preliminarmente que era viable radiar una señal EGNOS en las Regiones
CAR/SAM sobre la base del despliegue de una infraestructura terrena de estaciones RIMS, pudiendo llegar a
conseguir unas actuaciones en torno a capacidad APV I.
Basado en los resultados obtenidos en la primera fase del Proyecto y teniendo en cuenta el desarrollo
evolutivo del GNSS, se planificó la realización de una segunda fase cuyo objetivo era estudiar, desarrollar y
planificar los aspectos técnicos, financieros, operacionales e institucionales, de alternativas posibles para
implantar un sistema preoperacional SBAS para las Regiones CAR/SAM.
Al concluir esta fase, se dispondría de los elementos de juicio necesarios para que las entidades regionales
de la OACI tomen la decisión sobre el mejor modelo del sistema de aumentación SBAS (EGNOS extendido,
WAAS extendido, EGNOS-WAAS, o un sistema propio) a implantar en estas regiones, y de este modo poder
proceder con los concursos internacionales necesarios para la realización de dicha implantación. Esta Fase II del
proyecto se le denominó SACCSA (Solución de Aumentación para el Caribe, Centro y Sur América).
A mediados del año 2005, se definió tanto por parte del RLA/03/902, como por el Proyecto RLA/00/009
(WAAS en Suramérica), que ni el sistema EGNOS europeo ni el WAAS estadounidense podían ser factiblemente
extendidos hacia las regiones del Caribe, Centro y Sudamérica, por lo que el SACCSA se enfocó estratégicamente
a convertirse en un sistema SBAS propio, autónomo de estas regiones, pero interoperable con los demás sistemas
SBAS existentes y en desarrollo.
Las fases de las operaciones son las siguientes:
•
Fase I: Consistió en ensayos en vuelo SBAS/EGNOS en las regiones CAR/SAM, que permitieron
evaluar las prestaciones y la viabilidad de implantación del sistema, sobre la base del programa
EDISA de la Comisión Europea. Los datos resultantes mostraron preliminarmente que era viable
radiar una señal SBAS en las Regiones CAR/SAM, sobre la base del despliegue de una
infraestructura terrena de estaciones RIMS, pudiendo llegar a conseguir unas actuaciones en torno
a capacidad APV-I, (aproximación con guiado vertical, nivel I).
- 25 -
CAPITULO 3
•
Fase II. Consistió en la definición y análisis de viabilidad del sistema SACCSA. Se llevaron a cabo
la definición de especificaciones de los Segmentos de Tierra y de Vuelo, análisis de prestaciones
del sistema, análisis de gestión y explotación, estudio de viabilidad económica y financiera, y
análisis de la planificación de las actividades necesarias para disponer de un SBAS en el
continente, además de la impartición de cursos y seminarios en la región.
•
Fase III. Consiste en completar los estudios de sistema de la Fase II, cerrando temas como las
comunicaciones, ionosfera, topología de red terrena, etc. Se incluyen también en esta fase, la
definición de actividades de soporte a la validación / certificación del sistema, además de
seminarios GNSS avanza-dos. Además incluye el desarrollo y operación de un sistema formado
por un Centro de Captura de Datos y un prototipo del Centro del Proceso y Análisis SACCSA, que
junto a una red de monitorización distribuida a lo largo del continente Latinoamericano, permitirán
obtener las prestaciones SBAS iniciales sobre el continente.
A la conclusión de estas fases del proyecto, se estaría en disposición de iniciar el proceso de licitación e
implantación del sistema SBAS para las regiones CAR/SAM.10
10
rlasaccsa.com
- 26 -
GPS (GLOBAL POSITIONING SYSTEM)
3.1. HISTORIA
Al principio de la década del ´60 los Departamentos de Defensa, Transporte y
la Agencia Espacial Norteamericana (DoD, DoT y NASA respectivamente) tomaron
interés en desarrollar un sistema para determinar la posición basado en satélites. El
sistema debía cumplir los requisitos de globalidad, abarcando toda la superficie del
globo; continuidad, funcionamiento continuo sin afectarle las condiciones atmosféricas,
y altamente dinámico, para posibilitar su uso en aviación y precisión. Esto llevó a
producir diferentes experimentos como el Timation y el sistema 621B en desiertos
simulando diferentes comportamientos. Así el la idea de la creación se sistemas
navegados por satélites artificiales entra en servicio en 1965.
El Departamento de Defensa de los Estados Unidos lo implementó con el objeto de obtener en tiempo real
la posición de un punto en cualquier lugar de la tierra, como su desarrollo era un proyecto exclusivamente militar
que comenzaba como gran parte de la tecnología que se desarrolla en el siglo XX con la Guerra Fría, la cual se
requería de un sistema de navegación confiable, extremadamente preciso y de alcance mundial, por tal motivo
estaba orientado a poder conocer la ubicación exactas de toda la flota de guerra y poderlos conducir de modo mas
rápido y mas seguro hasta el enemigo. Este sistema surgió debido a las limitaciones del sistema Transit que en la
década de los ´70 proporcionaba posicionamiento usando métodos Doppler. La principal desventaja del este
último, era la no disponibilidad de satélites las 24 horas del día.
Se hacía necesario por tanto un salto cualitativo, y se inicia el proyecto NAVSTAR GPS (Navegation
System Timing And Ranging), fue efectivamente iniciada en diciembre de 1973. La iniciativa, financiación y
explotación corrieron a cargo del Departamento de Defensa, División Sistema Espacial. El proyecto se desarrolló
en distintas fases, que se desarrollaran mas adelante.
El 22 de febrero de 1978 fue lanzado el primer satélite, concluyendo en 1985 en el cual se desarrollaron y
lanzaron once satélites prototipo experimentales NAVSTAR, a los que siguieron otras generaciones de satélites,
hasta completar la constelación actual, a la que se declaró con capacidad operacional inicial en diciembre
de 1993 cuando se alcanzaron los 24 satélites que componían el segmento espacial y con un gran número de
estaciones de control operativas en todo el mundo, con capacidad operacional total en abril de 1995.
Finalmente Estados Unidos concibió un sistema formado por 24 satélites en órbita media (MEO), que
diera cobertura global y continua. ROCKWELL (California) se llevó uno de los contratos más importantes de su
época, con el encargo de 28 satélites.
Anécdota:
En 1984 un vuelo civil de Korean Airlines fue derribado por la Unión
Soviética al invadir por error su espacio aéreo. Ello llevó a la administración
Reagan a ofrecer a los usuarios civiles cierto nivel de uso de GPS, llegando
finalmente a ceder el uso global y sin restricciones temporales, de esta forma se
conseguía un retorno a la economía de los EE.UU. inimaginables unos años
atrás. Además suponía un gran liderazgo tecnológico originando un vertiginoso
mercado de aplicaciones.
Desde 1984, con muy pocos satélites en órbita, aparecieron tímidamente fabricantes de receptores GPS
destinados al mundo civil (Texas Instruments y Trimble Navigation).
El proyecto se desarrolló en distintas fases:
•
Fase 1 (1973-1977): estudio de conceptos, diseño y viabilidad del proyecto.
- 27 -
•
Fase 2 (1979-1988): producción del primer bloque de satélites que servirá para validar el sistema.
•
Fase 3 (1989-1995): conseguir un segmento espacial plenamente operativo con el lanzamiento del
segundo bloque de satélites. Se declara la Capacidad Inicial Operativa en 1993 (IOC), y se declara
la Plena Capacidad Operativa en 1995 (FOC).
•
Fase 4 (1996-2001): lanzamiento y desarrollo del tercer bloque de satélites, y operación y
mantenimiento del GPS.
•
Fase 5 (2002-2013): desarrollo de los nuevos satélites con mejores prestaciones que sustituirán a
los antiguos, y lograr una constelación más robusta.
3.2. ESTRUCTURA DEL SISTEMA GPS
El Sistema GPS esta constituido por tres segmentos fundamentales.
•
Segmento Espacial
•
Segmento de Control
•
Segmento Usuario
3.2.1. SEGMENTO ESPACIAL
Como ya se ha visto en el capítulo 1 y se muestra en la figura 2.3, el segmento espacial del GPS diseñado
en un principio constaba de 24 satélites distribuidos por igual en 6 planos orbitales circulares distribuidos
uniformemente con una inclinación de 55° sobre la línea del horizonte (plano ecuatorial) nombrados como A, B,
C, D, E y F, a una altitud de unos 20.200 Km. respecto al geocentro. El período de cada satélite para completar
una órbita es de unas 12 horas, siendo la posición la misma al cabo de un día sideral, siendo unas 11hs 58min de
tiempo rotacional terrestre. Lo cual cada satélite GPS vuela en una orbita terrestre media (MEO), dando 2 vueltas
al planeta por día. Estos satélites son puestos en funcionamiento por el Comando de las Fuerzas Aéreas Espaciales
de USA (AFSPC).
Figura 3.1: Distribución original de la constelación de 24 satélites.
Esto garantizaba un mínimo de 4 satélites disponibles en cualquier parte del mundo (normalmente 5 o 6),
lo que da una disponibilidad de al menos 24 satélites GPS el 95% de tiempo, sin embargo se han ido añadiendo
satélites que mejoren las prestaciones de servicio del GPS. En la actualidad hay un total de 31 satélites operativos,
además de 3 – 4 satélites fuera de servicio (“residuos”) que pueden ser reactivados si es necesario, están
distribuidos no uniformemente y que garantizan unas mejores prestaciones en cuanto a disponibilidad e integridad
que la constelación de 24 satélites.
- 28 -
Sin embargo, el estado y el funcionamiento de cada satélite varía de uno a otro, ya que algunos operan
con relojes atómicos de Cesio y otros con relojes atómicos de Rubidio. Como se puede apreciar en la figura
anterior, dividiendo la tierra en planos orbitales en función de la latitud y longitud se obtiene una red sobre la que
posicionar los distintos satélites. 11
Los satélites GPS se lanzaron en distintas fases, y a cada grupo de satélites se le conoce como bloque
como se muestra a continuación.
3.2.1.1. BLOQUE I DE SATÉLITES GPS
El primer bloque de satélites GPS está compuesto por los once primeros satélites que se lanzaron al
espacio, adjudicados a Rockwell Space Systems. Fueron lanzados desde la Base Aérea de Vandenberg, Estados
Unidos, ubicada en el estado de California, utilizándose para ello cohetes Atlas-F y Atlas-E. Se corresponden con
los satélites del 1 al 11 lanzados entre los años 1978 y 1985. Estos primero satélites tuvieron un peso de 450 Kg.
con una potencia nominal mayor a 400 W y un promedio de vida efectiva de 5 años, pero duraron más de lo
previsto, estaban compuesto por 2 paneles solares, lo cual desarrollaban un ancho de 5,3 metros con los paneles
desplegados. Fueron los satélites que sirvieron para validar el proyecto y estaban distribuidos a una altitud de
20.200 Km. (10.900 millas náuticas) con un ángulo de inclinación de 63 grados. Ninguno de ellos está ahora en
servicio.
Datos detallados de cada satélite se representan en la siguiente tabla:
Satélite
Fecha
Cohete
NAVTAR 1
NAVTAR 2
NAVTAR 3
NAVTAR 4
NAVTAR 5
NAVTAR 6
NAVTAR 7
NAVTAR 8
NAVTAR 9
NAVTAR 10
NAVTAR 11
NAVTAR 12
22/02/1978
13/05/1978
06/10/1978
10/12/1978
09/02/1980
26/04/1980
18/12/1981
14/07/1983
13/06/1984
08/09/1984
09/10/1984
Atlas F
Atlas F
Atlas F
Atlas F
Atlas F
Atlas F
Atlas F
Atlas F
Atlas E
Atlas F
Atlas E
SATELITES DEL BLOQUE I
Nombre
Masa Potencia
Banda
SVN PRN
Alterno
[Kg.]
[W]
S (SGLS) GPS 1.1
01
450
400
S (SGLS) GPS 1.2
02
453
400
S (SGLS) GPS 1.3
03
450
400
S (SGLS) GPS 1.4
04
450
400
S (SGLS) GPS 1.5
05
433
400
S (SGLS) GPS 1.6
06
450
400
S (SGLS) GPS 1.7
07
S (SGLS) GPS 1.8
08
163
400
S (SGLS) GPS 1.9
09
433
400
S (SGLS) GPS 1.10
10
770
400
S (SGLS) GPS 1.11
11
163
400
12
Resultado
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Fracaso
Exitoso
Exitoso
Exitoso
Exitoso
no funciono
Tabla 3.1: Satélites Bloque I GPS 12
3.2.1.2. BLOQUE II DE SATÉLITES GPS
El segundo bloque de satélites que se lanzaron al espacio está compuesto por los satélites lanzados de
1989 a 2006. Los satélites diseñados entre estas fechas se conocen como BLOCK II, BLOCK IIA, BLOCK IIR,
BLOCK IIR-M y BLOCK IIF.
El primer satélite del Bloque II fue lanzado en el año 1989 desde el Centro Espacial Kennedy en Cabo
Cañaveral, estado de Florida.
Se conoce a los satélites de este bloque del 13 al 21 lanzados en 1989 y 1990. Fueron desarrollados
también por Rockwell International (hoy Boeing) y actualmente ninguno de ellos presta servicio, y fueron
diseñados para ser capaces de prestar servicios durante 14 días sin contactar con el segmento de tierra.
11
12
David García Álvarez – Sistema GNSS, 2008.
Datos obtenidos de la página de la NASA
- 29 -
El peso de estos satélites es de 1.500 Kg. con un periodo de vida aproximadamente de 10 años. A partir de
estos satélites se modifico la inclinación de las orbitas llevándolas a 55 grados. Se lanzaron un total de 9 satélites.
Cabe mencionar que este nuevo bloque adiciona varias innovaciones, entre ellas la posibilidad de
incorporar a la señal una perturbación denominada SA (Disponibilidad Selectiva o Selective Availability) que no
era otra cosa que la disminución intencional de la precisión del sistema, también se estableció una limitación al
acceso del denominado código P. Estas características fueron impuestas a los usuarios civiles por cuestión de
interés militar.
Datos detallados de cada satélite se representan en la siguiente tabla:
Satélite
NAVSTAR II-1
NAVSTAR II-2
NAVSTAR II-3
NAVSTAR II-4
NAVSTAR II-5
NAVSTAR II-6
NAVSTAR II-7
NAVSTAR II-8
NAVSTAR II-9
Fecha de
lanzamiento
14/02/1989
10/06/1989
18/08/1989
21/10/1989
11/12/1989
24/01/1990
26/03/1990
02/08/1990
01/10/1990
SATELITES DEL BLOQUE II
Nombre
Masa Potencia
Cohete
Banda
SVN PRN
Resultado
Alterno
[Kg.]
[W]
710
Delta II
GPS IIF-1
14
840
Exitoso
Delta II
GPS IIF-2
13
840
710
Exitoso
Delta II
GPS IIF-3
16
840
710
Exitoso
710
Delta II
GPS IIF-4
19
840
Exitoso
Delta II
GPS IIF-5
17
840
710
Exitoso
710
Delta II
L1/L2
GPS 2.6
18
840
Exitoso
Delta II
L1/L2
GPS 2.7
20
840
710
Exitoso
Delta II
L1/L2
GPS 2.8
21
840
710
Exitoso
710
Delta II
L1/L2
GPS 2.9
15
840
Exitoso
Tabla 3.2: Satélites Bloque II GPS 13
3.2.1.3. Bloque IIA de satélites GPS
El BLOCK IIA (A por Advanced) es el conjunto de satélites lanzados entre
1990 y 1997, la producción de la serie IIA comprende un total de 19 satélites. Son los
satélites del SVN-22 al SVN-40 y fueron diseñados para poder permanecer 180 días
sin comunicarse con la estación de control. El primer satélite fue lanzado en
Noviembre de 1990, y el último en Noviembre en 1997. Su lanzamiento se realizó en
Cabo Cañaveral, Estados Unidos. A lo largo de este período la degradación de la
precisión del satélite se hace más patente. El 8 de diciembre de 1993 se habían puesto
en orbita 15 satélites adicionales de este bloque, totalizando así 24 satélites, fue
entonces declarado al sistema en plena capacidad operacional.
El tiempo medio de vida de BLOCK II y BLOCK IIA es de 7,3 años. En la actualidad 8 de los satélites
BLOCK IIA han dejado de prestar servicio.
Datos recavados en Abril de 2011 aseguran que 11 satélites del éste bloque integran la constelación GPS
actual.
Datos detallados de cada satélite se representan en la tabla 3.3:
Satélite
13
Fecha de
lanzamiento
SATELITES DEL BLOQUE II-A
Nombre
Cohete Banda
SVN
Alterno
PRN
Masa Potencia
Resultado
[Kg.]
[W]
Datos obtenidos de la página de la NASA
- 30 -
NAVSTAR 2A-01
NAVSTAR 2A-02
NAVSTAR 2A-03
NAVSTAR 2A-04
NAVSTAR 2A-05
NAVSTAR 2A-06
NAVSTAR 2A-07
NAVSTAR 2A-08
NAVSTAR 2A-09
NAVSTAR 2A-10
NAVSTAR 2A-11
NAVSTAR 2A-12
NAVSTAR 2A-13
NAVSTAR 2A-14
NAVSTAR 2A-15
NAVSTAR 2A-16
NAVSTAR 2A-17
NAVSTAR 2A-18
NAVSTAR 38
26/11/1990
04/07/1991
23/02/1992
10/04/1992
07/07/1992
09/09/1992
22/11/1992
18/12/1992
03/02/1993
29/03/1993
13/05/1993
26/06/1993
30/08/1993
28/10/1993
10/03/1994
28/03/1996
16/07/1996
12/09/1996
06/11/1997
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
GPS IIA-1
GPS IIA-2
GPS IIA-3
GPS IIA-4
GPS IIA-5
GPS IIA-6
GPS IIA-7
GPS IIA-8
GPS IIA-9
GPS IIA-10
GPS IIA-11
GPS IIA-12
GPS IIA-13
GPS IIA-14
GPS IIA-15
GPS IIA-16
GPS IIA-17
GPS IIA-18
GPS 38
23
24
25
28
26
27
32
29
22
31
37
39
35
34
36
33
40
30
38
32
24
25
26
27
09
04
06
03
10
30
08
840
840
840
840
840
840
840
840
840
840
840
840
840
840
840
840
840
840
840
710
710
710
710
710
710
710
710
710
710
710
710
710
710
710
710
710
710
710
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Tabla 3.3: Satélites Bloque II-A GPS 14
3.2.1.3.3.
Bloque IIR de satélites GPS
En Julio de 1997 es lanzado al espacio el primer BLOCK IIR (R por
replacement, reemplazo o sustitución) de satélites, y el último lanzamiento fue en
Noviembre de 2004, es decir que estos satélites iban reemplazando a los satélites que
salían de operación de los bloques II y IIA. Desarrollados por la Lockheed Martin, la
producción fue de un total de 13 satélites, correspondiéndose con los vehículos SVN41 al SVN-47, SVN-51, SVN-54, SVN-56, SVN-59 al SVN-61, se distinguen por las
mejoras introducidas en los relojes de abordo. Su lanzamiento se realizó en Cabo
Cañaveral, Estados Unidos. Son más avanzados que los anteriores y pueden
permanecer sin comunicar con el segmento de control 14 días y 180 navegando en
modo autónomo sin sufrir casi degradación alguna en su órbita. Esto es posible gracias a un sistema de
comunicación entre los satélites BLOCK IIR que les permite estimar los parámetros y alínearse sin contactar con
el segmento de control.
Su vida media es más larga, unos 7,8 años y son los que prestan servicio en la actualidad junto a los
BLOCK IIA.
Otra modificación de su predecesor es el monitoreo a bordo (on board) del reloj atómico.
De la misma forma podemos decir que datos de Abril de 2011, manifiesta que 12 satélites de éste bloque
forman parte de la columna vertebral de GPS, junto con los referidos a los pertenecientes del bloque IIR (M) de
serie.
Datos detallados de cada satélite se representan en la tabla 3.4:
Satélite
14
SATELITES DEL BLOQUE II-R
Fecha de
Nombre
Masa Potencia
Cohete Banda
SVN PRN
Resultado
lanzamiento
Alterno
[Kg.]
[W]
17/01/1997 Delta II L1/L2 GPS IIR-1
42
*
Datos obtenidos de la página de la NASA
- 31 -
NAVSTAR 43
NAVSTAR 46
NAVSTAR 47
NAVSTAR 48
NAVSTAR 49
NAVSTAR 50
NAVSTAR 51
NAVSTAR 52
NAVSTAR 53
NAVSTAR 54
NAVSTAR 55
NAVSTAR 56
23/07/1997
07/10/1999
11/05/2000
16/07/2000
10/11/2000
30/01/2001
29/01/2003
31/03/2003
21/12/2003
20/03/2004
23/06/2004
06/11/2004
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
L1/L2
GPS IIR-2
GPS IIR-3
GPS IIR-4
GPS IIR-5
GPS IIR-6
GPS IIR-7
GPS IIR-8
GPS IIR-9
GPS IIR-10
GPS IIR-11
GPS IIR-12
GPS IIR-13
43
46
51
44
41
54
56
45
47
59
60
61
13
11
20
28
14
18
16
21
22
19
23
02
840
2000
2100
710
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Tabla 3.4: Satélites Bloque II-R GPS
*
Se destruyó 13 segundos después del despegue, estimando un costo de U$S 55 millones. Fue lanzado
en un cohete Delta II 7925-9.5 de número de serie D241, en Cabo Cañaveral . El lanzamiento ocurrió a las
16:28:01 GMT del el 17 de Enero de 1997. Trece segundos más tarde, el cohete activa la terminación del sistema
de vuelo a través de su ordenador de a bordo, esto detonó cargas explosivas a bordo causando su explosión.
Una investigación determinó que el fallo fue causado por una grieta en la cubierta del número 2 GEM40 motor de combustible sólido, que se propagaron en los primeros 6 segundos de vuelo. Doce segundos después
esto causó una falla estructural del refuerzo, lo cual se dispara el sistema de autodestrucción que destruyó el
cohete un segundo más tarde.
El refuerzo había sido dañado por la presión de un soporte en un nuevo sistema de transporte que había
sido introducido recientemente. Tras el fracaso, el sistema fue revisado con tecnología de ultrasonido para ser
aplicados a los futuros vuelos. 15
3.2.1.3.4.
Bloque IIR-M de satélites GPS
El Bloque IIR (M) de satélites es una versión mejorada de la serie de IIR,
completando la columna vertebral de la constelación GPS de la actualidad. La "M" es
sinónimo de modernización, en referencia a las señales del GPS nueva civiles y
militares que se agregó con ésta generación de naves espaciales.
Desarrollado por Lockheed Martin, hay 8 satélites del bloque IIR (M): SVN48 al SVN-50, SVN-52, SVN-53, SVN-55, SVN-57 y SVN 58. El primer lanzamiento
IIR (M) se puso en marcha en Septiembre de 2005, y el último se produjo en Agosto
de 2009.
En Abril de 2011, había 7 satélites funcionando en la constelación de satélites GPS, con el último (SVN49), designado "poco saludables" pendiente de revisión técnica.
Datos detallados de cada satélite se representan en la tabla 3.5:
Satélite
NAVSTAR 57
15
SATELITES DEL BLOQUE IIR-M
Fecha de
Nombre
Masa Potencia
Cohete
Banda
SVN PRN
lanzamiento
Alterno
[Kg.]
[W]
26/09/2005 Delta II L1/L2/L2C GPS2R-14
53
17
Resultado
Exitoso
Datos obtenidos de la página de la NASA
- 32 -
NAVSTAR 58
NAVSTAR 59
NAVSTAR 60
NAVSTAR 61
NAVSTAR 62
NAVSTAR 63
NAVSTAR 64
25/09/2006
17/11/2006
17/10/2007
20/12/2007
15/03/2008
24/03/2009
17/08/2009
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
Delta II
L1/L2/L2C
L1/L2/L2C
L1/L2/L2C
L1/L2/L2C
L1/L2/L2C
L1/L2/L2C
L1/L2/L2C
GPS2R-15
GPS2R-16
GPS2R-17
GPS2R-18
GPS2R-19
GPS2R-20
GPS2R-21
52
58
55
57
48
49
50
31
12
15
29
07
01
05
2032
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Exitoso
Tabla 3.5: Satélites Bloque IIR-M GPS 16
Este bloque presenta las siguientes mejoras:
•
L2C es la segunda señal GPS de uso civil, diseñada específicamente para satisfacer las necesidades
comerciales.
•
Dos señales nuevas de uso militar proveyéndoles una mayor resistencia de ataques terroristas.
•
Niveles flexibles de alimentación para las señales militares.
3.2.1.3.5.
Bloque IIF de satélites GPS
Esta generación de satélites presenta importantes mejoras en el sistema de
navegación de a bordo. Esta serie fue creada con la intención de ampliar las
capacidades de la serie IIR-M, se logró gracias a la implementación de una nueva
señal de uso civil (L5) y de uso militar (M-código). El lanzamiento de estos
vehículos comenzó en 2001 diseñados para una vida útil de 15 años.
La sigla F de este bloque es de seguimiento (follow-on). Cada nave
espacial utiliza una mezcla de
los relojes atómicos de
rubidio y
cesio para
mantener el tiempo dentro de los 8 mil millonésimas de segundo por día.
La serie IIF mejorará la exactitud, la intensidad de la señal, y la calidad del GPS.
Desarrollado por Boeing, la serie IIF incluye un total de 12 satélites SVN-62 al SVN-73.
Satélite
GPS IIF-1
GPS IIF-2
GPS IIF-3
GPS IIF-4
GPS IIF-5
GPS IIF-6
GPS IIF-7
GPS IIF-8
GPS IIF-9
GPS IIF-10
GPS IIF-11
GPS IIF-12
Fecha de
lanzamiento
28/05/2010
23/06/2011
2011
2011
2011
2011
Desconocido
Desconocido
Desconocido
Desconocido
Desconocido
Desconocido
SATELITES DEL BLOQUE II-F
Nombre
Masa
Cohete
Banda
SVN PRN
Alterno
[Kg.]
Delta IV L1/L2/L5/M GPS IIF SV-1
62
25 1630
Delta IV
63
64
Delta IV
Atlas V
65
Delta IV
66
Atlas V
67
68
69
70
71
72
73
Resultado
Exitoso
Sin datos
Sin datos
Sin datos
Sin datos
Sin datos
Sin datos
Sin datos
Sin datos
Sin datos
Sin datos
Sin datos
Tabla 3.6: Satélites Bloque II-F GPS 17
El primer satélite IIF (SVN-62, también conocido como EE.UU.-213 y GPS IIF SV-1) se puso en marcha
el 28 de Mayo de 2010. Tras el lanzamiento del satélite se sometió a un período de prueba que estaba programada
para durar entre 90 y 120 días. Se colocó en el plano B de la constelación GPS, y transmitirá el PRN-25 de la
señal. PRN-25 fue transmitido previamente por EE.UU.-79 (NAVSTAR 25), que fue retirado a finales de 2009
16 17
,
Datos obtenidos de la página de la NASA
- 33 -
después de casi 18 años de servicio. Si hablamos de precisión de la señal se espera que sea el doble que la de sus
predecesores. El 27 de Agosto de 2010 fue declarado oficialmente operacional.
Siguiendo con datos recavados a partir de Abril de 2011, solamente existe 1 satélite de la serie IIF en la
constelación GPS.
Formaron parte de equipamiento de cada satélite dos paneles solares y un sistema de propulsión, los
paneles solares se utilizan para recargar los acumuladores de níquel-cadmio que permiten el funcionamiento
mientras el satélite pasa por la sombra de la Tierra.
Desde el sistema de control terrestre es posible activar los sistemas de propulsión con el objetivo de
corregir las orbitas de cada satélite o incluso cambiar de posición dentro de la misma orbita.
3.2.1.4. Bloque III de satélites GPS
Actualmente este bloque de satélites esta en desarrollo por Lockheed Martin
la serie GPS III es el último bloque de satélites GPS (SVN-74 y más).
GPS III proporcionará señales más potentes además de la fiabilidad de
señal mejorada, la exactitud e integridad, todo lo cual incrementará la precisión,
navegación y temporización.
La primera serie de estos satélites es designado GPS IIIA.
Dos satélites GPS III se producirán con una opción de compra de otros 10 satélites. Las futuras
versiones contará con mayor capacidad para satisfacerlas demandas de los usuarios militares y civiles por igual.
Satélite
GPS III-1
SATELITES DEL BLOQUE III
Fecha de
Nombre
Masa Potencia
Cohete Banda
SVN PRN
Resultado
lanzamiento
Alterno
[Kg.]
[W]
74
Sin datos
2014
Tabla 3.7: Satélites Bloque III GPS
Las mejoras:
•
IIIA: Cuarta señal GPS civil (L1C) para la interoperabilidad internacional.
•
IIIA: Esperanza de vida de diseño de 15 años.
•
Futuro: Alerta de socorro por satélite (DASS) para la búsqueda y rescate.
•
Futuro: Satélite cruzados para el comando rápido y público reducido de datos. 18
3.2.2.
IDENTIFICACIÓN
La identificación de los satélites puede hacerse de varias formas:
18
•
Por su orden de lanzamiento o número NAVSTAR (SVN)
•
Por la orbita y posición que ocupa en ella. Un ejemplo sería el satélite 3D, que corresponde al
satélite número 3 del plano orbital D.
•
Por su PRN o Ruido Pseudo Aleatorio (Pseudo Random Noise) característico y exclusivo de cada
satélite. En los códigos de transmisión existen características de ruido pseudoaleatorio traducidas
en bits que identifican a cada satélite de la constelación.
•
Por el número de catálogo NASA.
gps.gov/systems/gps/space
- 34 -
•
Por la identificación internacional constituida por el año de lanzamiento, el número de lanzamiento
en el año y una letra según el tipo.
•
Por el número IRON (Integer Range Operation Number), que es un número aleatorio asignado por
la Junta de Defensa Aérea Norteamericana NORAD de Estados Unidos y Canadá.
Pero fundamentalmente en la técnica GPS, los satélites se identifican por su PRN.
3.2.3.
RELOJES DE LOS SATÉLITES
Los relojes de los satélites, son en realidad osciladores atómicos, los que por su alta frecuencia y la gran
estabilidad de la misma, permiten efectuar mediciones de tiempo con elevada precisión. La estabilidad se
caracteriza por el elevado
∆f
, donde ∆f indica la variación de la frecuencia posible en un periodo dado (por
f
ejemplo un día) y f indica la frecuencia propia de reloj. A continuación se muestra una tabla de valores de los
diferentes tipos de relojes atómicos.
Tipo de Reloj
Cuarzo
Rubidio
Cesio
Hidrógeno
Frecuencia de
oscilación (GHz)
Estabilidad
∆f / f
Tiempo para perder
un segundo
0,05
6834682613
9192631770
1420405751
10-9
10-12
10-13
10-15
30 años
30.000 años
300.000 años
30.000.000 años
Tabla 3.8: Tipos de Reloj Atómicos
Todos disponen de osciladores atómicos de cesio, salvo los SVN 24, 27 y 31 que lo tienen de rubidio.
Los mensajes, compuestos por señales sincronizadas de tiempo, parámetros de posición e información
adicional, se transmiten por medio de emisiones correspondientes a la banda L del espectro y ello debido a la
buena transparencia atmosférica que presentan las frecuencias de radio con longitudes de onda correspondientes al
intérnalo L (390 MHz – 1550 MHz), así como por la facilidad de capturar estas señales con antenas de gran
sencillez. Los circuitos emisores receptores de los centros de control operan en la banda S, y tienen la finalidad de
intercambiar información con los satélites para la corrección de sus órbitas. La posición de un punto en la Tierra
se calcula mediante la captura de las señales transmitidas y su fundamento, es la medición de la distancia entre el
emisor (satélite) y el receptor terrestre, por aplicación de la fórmula:
e = V ×T
Donde:
V= velocidad de las ondas en el vacío; V = 299.792.458 m/s (velocidad de la luz)
T= tiempo transcurrido en el trayecto del mensaje o incógnita a determinar.
La determinación de tiempo se calcula conociendo el intervalo transcurrido entre el momento de la
emisión y el transcurrido hasta su recepción, periodo que se puede conocer por la sincronización de códigos
iguales entre el emisor y el receptor. Al recibir el receptor un determinado código, mide la diferencia de tiempo
transcurrida entre el código emitido por el satélites y la recepción de igual código en el receptor. Para realizar esta
medida con alta precisión, los satélites utilizan de 2 a 4 osciladores atómicos de rubidio.
El oscilador que controla el emisor posee una frecuencia fundamental de 10,23 MHz, sobre la que se
estructura todo el conjunto de la señal radiodifundida, denominándose a su escala de tiempo como GPS-Time.
Escala uniforme e independiente de las variaciones de rotación de la Tierra, la cual tiene como origen el tiempo
universal combinado (UTC), correspondiente a las cero horas del día 6 de enero de 1980
3.2.4.
SEÑAL DE LOS SATÉLITES.
- 35 -
Los satélites de la constelación NAVSTAR constan de un oscilador antes mencionado que genera una
frecuencia fundamental v0 de 10,23 MHz. A partir de esta frecuencia fundamental se generan dos portadoras en la
banda L de radiofrecuencia, denominadas L1 y L2. Además, existen dos formas de código pseudoaleatorio que se
modulan sobre estas portadoras, son los códigos C/A y P, además de un mensaje, que da la información de los
parámetros orbitales del satélite y del estado del reloj. Los códigos son una secuencia de +1 y - 1,
correspondientes a los valores binarios de 0 y 1 respectivamente.
Los componentes de la señal y sus frecuencias son:
COMPONENTES
Frecuencia Fundamental
Portadora L1
Portadora L2
Código P
Código C/A
Código W
Mensaje de Navegación
v0
154 · v0
120 · v0
v0
v0 / 10
v0 / 20
v0 / 204.600
FRECUENCIA (MHz)
10,23
1.575,42
1.227,60
10,23
1,023
0,5115
50 x 10-6
Tabla 3.9: Frecuencias Fundamental GPS
El código C/A (course adquisition), que es el menos preciso, se repite cada milisegundo, dando como
resultado un código de 1023 chips, siendo la longitud aproximada de cada chip de unos 300 metros. Este código
está declarado de uso civil para todos los usuarios.
El código preciso P se compone de 2,3547 x 1014 bits y se repite aproximadamente cada 266,4 días. Este
código lleva una palabra denominada HOW que indica en que momento del código está cuando el receptor
empieza a recibirlo, de este modo el receptor engancha el código y empieza a medir.
El código P es secreto y de uso militar. Se origina a partir de la combinación de dos secuencias de bits,
generados a partir de dos registros. La longitud de cada chip es de 30 m. Con el fin de proteger el código P, éste se
encripta usando un código W, dando lugar al código Y. Si el código W está en curso se habla de que está
conectado el A/S (Anti-Spoofing).
El mensaje de navegación es mandado por los satélites, y consta esencialmente de información sobre el
reloj de los satélites, parámetros orbitales (efemérides), estado de salud de los satélites y otros datos de corrección.
El mensaje consta de 25 grupos de 1500 bits cada uno y divididos en cinco celdas. Cada grupo se transmite con
una frecuencia de 50 Hz. y tarda 30 segundos.
Esto supone que el mensaje modulado completo sobre ambas portadoras tiene una duración de 12 min. 30
seg. Por razones de índole militar, se introduce un error intencionado en las efemérides radiodifundidas de los
satélites, denominado Disponibilidad Selectiva (SA). Esto repercute en el posicionamiento sobre el sistema de
referencia WGS84, ya que si la posición de los satélites que nos sirven de referencia está alterada nuestro
posicionamiento no se va a realizar en dicho sistema, sino que se va a efectuar en un sistema arbitrario, con un
error mayor o menor en función de la cantidad de SA que exista en ese instante. Este problema es importante en
posicionamientos absolutos, ya que no podemos saber la posición correcta. Sin embargo, en posicionamientos
diferenciales nos afecta en posición pero no en precisión, ya que la posición relativa de un punto respecto a una
referencia (sus incrementos de coordenadas) no está afectada de este error.
3.2.4.1. SEÑAL GPS MODERNAS.
•
L2C (1227.6 MHz). Permite el desarrollo de receptores civiles de dos frecuencias, que consienten
en introducir una corrección a los errores de retardo en la ionosfera. Es interoperable con el sistema
japonés QZSS.
•
L5 (1176.45 MHz). Se trata de un servicio de radionavegación aeronáutica para labores de
seguridad y salvamento. Será compatible con Galileo, GLONASS y QZSS, con el objetivo de ser
- 36 -
interoperable. Se transmitirá su señal con más potencia que las señales civiles actuales y tendrá
mayor ancho de banda. Su frecuencia más baja facilitará su utilización en interiores.
•
L1C (1575.42 MHz). Obedece a un acuerdo entre EE.UU. y la U.E. de tener una señal L1
compatible e interoperable con Galileo. Tendrá más potencia que la L1.
•
Código M. Es el código militar modernizado. Empleará una modulación similar a la de la señal de
Galileo.
3.3. SEGMENTO DE CONTROL
Las funciones principales del segmento de control, denominado internacionalmente con las siglas OCS
(Operational Control Segment) son:
•
Monitoreo y control permanente de los satélites con el objeto de determinar y predecir las orbitas y
los relojes de a bordo.
•
Sincronización de los relojes de los satélites con el tiempo GPS
•
Transmisión, a cada satélite, de la información procesada.
El segmento de control del GPS está compuesto por los siguientes elementos:
Estación de control maestra (MCS): situada en Colorado en la base Schnever de la US Air Force. Existen
además dos estaciones de reserva en California y Maryland.
Estaciones de control (MS): situadas por todo el Globo terráqueo (Hawai, Kwajalein, Ascension Island,
Diego García, Colorado Springs), tres de ellas poseen antenas que transmiten información a los satélites
(Ascension Island, Diego García, Kwajalein), mientras que otras dos no.
Y también distribuidas de la misma manera están las Antenas Terrestres (GA). 19
Se conoce de manera muy precisa la posición de cada una de estas estaciones de monitoreos de acuerdo
con las mediciones realizadas por el World Geodetic System en el 1972 y posteriormente en 1984, equipadas con
receptores doble frecuencia L1/L2 y un reloj de cesio. De ésta forma se puede conocer la precisión del GPS, ya
que al calcular la posición de la estación por triangulación a partir de la información que envían los satélites GPS,
se calcula la desviación sobre la posición exacta (medida) de la estación.
Las órbitas predeterminadas y programadas en los sistemas de navegación del satélite se conocen con el
nombre de Almanaques. Su trayectoria es bastante precisa al no existir secciones atmosféricas de consideración;
no obstante, están afectadas por errores debidos a la atracción gravitacional de la Luna y el Sol y a la presión de la
radiación solar sobre el satélite.
Debido a ello, las estaciones de control terrestre realizan cálculos de posición cada cierto intervalo de
horas. Estos cálculos dan lugar a la definición de una nueva órbita, y las correcciones a las que emite junto con la
información del tiempo. Las órbitas así calculadas y con sus datos de corrección incorporados se conocen como
Efemérides.
Dichos datos se envían a la MCS, que los procesa y aplica las correcciones necesarias en cuanto a órbitas
y mensaje de navegación del satélite.
Por último dichas correcciones se transmiten por las estaciones de control que poseen antenas de tierra,
que a su vez pueden aplicar correcciones de reloj, comandos de telemetría y otros mensajes, siendo una función
exclusiva de la MCS la corrección de la órbita de los satélites.
19
Apuntes de clases-Del Bianco, 2001 - David García Álvarez – Sistema GNSS, 2008 - GPS posicionamiento global-Huerta,
Mangiaterra, Noriega.
- 37 -
La transmisión de correcciones se realiza tres veces al día. En caso de fallo de la MCS, las dos estaciones
de reserva (Backup) estarían listas para funcionar de forma inmediata sin que se alterara el normal funcionamiento
del sistema en ningún momento. 20
3.3.1.
ESQUEMA DE FUNCIONAMIENTO DEL SEGMENTO DE CONTROL
Figura 3.2: Segmento Control GPS.
Como se puede ver en la figura 2.5, el segmento de control esta integrado por 11 estaciones.
1) Colorado Spring (Schnever AFB - USA, Estación de Control Maestra)
2) Isla Ascensión (Atlántico Sur, Estación de Monitoreo)
3) Diego García (Indico, Estación de Monitoreo)
4) Kwajalein (Pacifico Occidental, Estación de Monitoreo)
5) Hawai (Pacifico Oriental, Estación de Monitoreo)
6) Quito (Ecuador, NGA Estación de Monitoreo)
7) Buenos Aires (Argentina, NGA Estación de Monitoreo)
8) Hermitage (Inglaterra, NGA Estación de Monitoreo)
9) Bahrein (Golfo Pérsico, NGA Estación de Monitoreo)
10) Smithfield (Australia, NGA Estación de Monitoreo)
11) Washington DC (USA, NGA Estación de Monitoreo)
20
David García Álvarez – Sistema GNSS, 2008
- 38 -
Figura 3.3: Estaciones del Segmento de Control
3.4. SEGMENTO USUARIO
Este segmento esta dirigido exclusivamente para los equipos de medición topográfica y geodésica.
Esta constituido por los instrumentos utilizados para receptores y procesar la señal emitida por los
satélites. Estos instrumentos están integrados esencialmente por una antena y un receptor. Un equipo
complementario es usado, en ocasiones, para transferir datos entre receptores.
La antena esta conectada por un cable al receptor o en otros casos forma una sola unidad. Las
coordenadas que se calculan corresponden centro radioeléctrico de la antena.
El receptor consta de un mínimo de 4 canales (con el avance tecnológico se ha llegado a 172 canales) que
permiten recepcionar y procesar simultáneamente la señal de cada satélite.
Posee además un oscilador de cuarzo que permite generar la frecuencia de referencia para realizar la
observación, debido a que cada receptor tiene almacenado en su memoria las replicas de todos los PRN. Así
cuando recibe la emisión satelital puede efectuar el reconocimiento del satélite correspondiente.
Un microprocesador interno con el software correspondiente calcula las coordenadas de la antena y la
velocidad y acimut si el aparato está en movimiento. También consta con una memoria para poder almacenar las
observaciones. La capacidad de esta memoria varia de acuerdo al tipo de receptor, pudiendo llegar a almacenar
información durante varias decenas de horas.
Todo equipo adiciona una unidad de alimentación eléctrica que deberá brindar al receptor la autonomía
necesaria.
Los equipos están en continuo desarrollo y su evolución es comparable a la experimentada en informática
durante las últimas décadas para los ordenadores personales.
3.4.1.
INFORMACIÓN EN EL RECEPTOR
Una vez en funcionamiento, el receptor puede ofrecer al operador una muy amplia y diversa información
sobre el proceso de observación, mientras recibe las señales de los satélites.
Aunque varia entre diferentes modelos, se suele disponer de la información siguiente:
•
Satélites locales
•
Satélites en seguimiento
- 39 -
•
Intensidad de cada señal recibida
•
Condición de cada satélite en movimiento
•
Posición: longitud, latitud, altitud
•
Calidad de la geometría de observación
Según la precisión con que se puede obtener los resultados, podemos clasificarlos en receptores:
Geodésicos, Topográficos o Navegadores. 21
3.5.
SERVICIOS GPS
El GPS provee de dos niveles de servicio conocidos como SPS y PPS:
•
SPS: es el servicio que está disponible a nivel global para todos los usuarios de GPS de manera
gratuita. Al inicio su precisión horizontal era de unos 100 metros y vertical de 156, debido a la
Disponibilidad Selectiva (SA) actualmente en desuso. Su precisión de temporal es de 340 ns con
respecto al UTC. En la actualidad, sin la SA la precisión depende del número de satélites siendo de
entre 10 y 20 m para al menos cuatro satélites. En la figura siguiente se detalla el momento de la
desactivación de la SA, la cual se puede observar que disminuye considerablemente el error de
posicionamiento.
Figura 3.4: Estaciones del Segmento de Control
•
3.6.
PPS: es el servicio militar de alta precisión, velocidad y servicio temporal, dirigido sólo a los
usuarios autorizados por los EEUU. Permite una precisión de 2,2 metros horizontales, 27 metros
verticales. Su uso militar excluye a los usuarios no autorizados encriptando dicha información.
SISTEMA DE TIEMPO GPS
El sistema GPS utiliza su propio sistema de tiempo, llamado Tiempo GPS (TGPS). Mantiene una
desviación constante de 19 segundos con respecto al Tiempo Atómico Internacional (TAI), Coincidió con el
Tiempo Universal Coordinado (UTC) en la época inicial TGPS, fue en la fecha 6 de Enero de 1980. Su unidad es
el segundo del Tiempo Internacional, por lo que es una escala uniforme y continua.
21
David García Álvarez – Sistema GNSS, 2008
- 40 -
Las diferencias entre el TGPS y UTC no es constante, se relacionan a través de los segundos
intercalares. El control del tiempo en GPS es el principal factor de impresición. Por otra parte, el GPS es una
herramienta muy valida para la transmisión de tiempo.
Dt
32.184 s
TDT
0.000 s
TAI
-19.000 s
TGPS
UTC
13 s
T
6 de Enero
1980
2000
2020
Figura 3.5: Tiempo GPS
A partir del tiempo GPS se definen las unidades derivadas del tiempo GPS, estas son:
•
El día GPS (DOY): número del día dentro del año calculado en el intervalo 1-365, 1-366 en caso
que sea bisiesto,
•
La semana GPS (GPS week): semana transcurrida desde el 6 de Enero de 1980 a 0 hs del UTC, las
semanas GPS tienen un ciclo de 1024, y el primer ciclo se alcanzó en la noche del 21 al 22 de
Agosto de 1999, llamado ”GPS Week Rollover”
•
El día de la semana que es la numeración de días dentro de cada semana en la que corresponde el 0
para el Domingo y 6 para el Sábado.
DIA CONVENCIONAL
17 de Junio 2011
DIA DEL AÑO (DOY)
168
SEMANA GPS
1640
DIA DE LA SEMANA GPS
4 (Jueves)
Tabla 3.10: Ejemplo de tiempo GPS
3.7.
EFEMÉRIDES
Las efemérides es la información enviada por los satélites, dando la posición precisa de los mismos. Esta
información cambia frecuentemente, siendo actualizada por las estaciones de seguimiento de la Tierra. Los
parámetros orbitales de los satélites se van actualizando a medida que su movimiento se ve alterado por la
atracción del Sol y la Luna, la diferencia de gravedad entre distintas zonas de la corteza terrestre, viento solar, etc.
Un período de cambio típico sería de 4 horas.
Ya se ha comentado que el sector de control está formado por cinco estaciones centrales de seguimiento
que controlan los satélites. Todos los datos se envían a la central donde se procesan y se calculan las efemérides,
los estados de los relojes y toda la información que luego se transmite y almacena en la memoria de cada satélite
para su radiodifusión. La precisión final alcanzable depende de las efemérides.
- 41 -
3.7.1.
EFEMÉRIDES TRANSMITIDAS
Cada satélite de la constelación GPS transmite en el mensaje sus efemérides. Por este motivo reciben el
nombre de transmitidas. Estas efemérides han sido previamente cargadas al satélite por parte del segmento de
control. Al ser enviadas en tiempo real por los satélites, las efemérides transmitidas son predicciones de los
parámetros reales. La predicción de estas órbitas se hace a partir de las pseudodistancias registradas en las cinco
estaciones del segmento de control.
Básicamente, las efemérides transmitidas contienen seis parámetros que definen una órbita normal,
referida a una determinada época y nueve parámetros adicionales que permiten determinar las correcciones para
modelar el movimiento perturbado. Todos estos parámetros son actualizados cada hora y solamente deberían ser
utilizados en un intervalo de cuatro horas en torno a la época de referencia. Es decir el usuario recibe esta
información en el instante de observación, contenida en la señal del satélite, estos pares de parámetros permiten
extrapolar la ubicación del satélite dos horas antes y dos horas después del tiempo de referencia haciendo un total
de cuatro horas. La estación de control maestra las envía al satélite y este al usuario.
Parámetro
AODE
te
+
-++
e, M0, w0, i0
L0
?n
I
?
Cuc, Cus
Crc, Crs
Cic, Cis
Significado
Antigüedad de los datos de efemérides (Age of ephemeris data)
Época de referencia
Elementos keplerianos referidos a la época de referencia te
Longitud del nodo ascendente al comienzo de la semana GPS (t0)
Variación del movimiento medio
Velocidad de variación de la inclinación
Velocidad de variación de la ascensión recta del nodo Ascendente
Coeficientes correctores del argumento del perigeo
Coeficientes correctores de la distancia geocéntrica
Coeficientes correctores de la inclinación
Tabla 3.11: Efemérides Transmitidas
3.7.2.
EFEMÉRIDES PRECISAS
Las efemérides de precisión son determinaciones orbitales de alta precisión realizadas por diferentes
instituciones, es por ello que son calculadas a posteriori, por interpolación, considerando la efectiva posición de
cada satélite obtenida mediante las observaciones efectuadas desde las estaciones de control, es decir, emplean los
datos de pseudodistancias y fase registrados por estaciones permanentes diseminadas por todo el mundo. Los
ficheros con las efemérides son puestos a disposición pública a través de Internet. Estas efemérides proporcionan
coordenadas más precisas que las transmitidas.
Los ficheros de efemérides precisas básicamente contienen, en intervalos de 15 minutos, la situación y el
error del oscilador de cada uno de los satélites. La situación viene dada en forma de coordenadas geocéntricas
respecto al correspondiente ITRF.
Los formatos de ficheros más extendidos son el denominado SP3, en código ASCII y el denominado
EF18, en formato binario. Los organismo más importantes para la determinación y distribución de efemérides
precisas son el International GPS Service for Geodinamics (IGS) y el Nacional Godetic Survey (NGS).
3.8.
ALMANAQUE
Es la versión simplificada de las efemérides, permite calcular las coordenadas de los satélites en forma
aproximada, su validez es de seis meses, aunque es recomendable su actualización.
- 42 -
3.9.
DATUM
En algunos receptores aparece este término, que se refiere a los parámetros que definen el Sistema de
Referencia utilizado por el receptor, por lo tanto debe prestarse especial atención a su configuración. 22
3.10.
PRINCIPIO DE FUNCIONAMIENTO DEL SISTEMA GPS
El sistema GPS es, en esencia, un sistema de medida de tiempos, donde el observable básico es el tiempo
de retardo entre la emisión de la señal por los satélites (al menos tienen que ser cuatro) y la llegada a nuestro
receptor. Cada satélite GPS transmite señales centradas en dos frecuencias de radio de microondas, 1575,42 MHz,
llamada Link 1 ó L1, y 1227,60 MHz, ó L2. Estos canales pertenecen a la banda de frecuencias L (1-2 GHz).
Ambas son múltiplos de la frecuencia fundamental 10,23 MHz, patrón de tiempo del sistema.
Si los relojes con los que medimos estos tiempos están perfectamente sincronizados y las señales se
propagan en el vacío, este tiempo de retardo nos estaría midiendo la distancia geométrica a cada satélite.
Calculando la distancia a un mínimo de tres satélites y conociendo su posición podríamos, mediante trilateración,
estimar nuestra posición. Conocer la posición de cada satélite con una cierta aproximación no constituye un gran
problema, pues en esta misma señal se modulan los parámetros de las efemérides. Sin embargo, la sincronización
de los relojes sí constituye un problema serio: una desincronización entre ambos relojes de tan sólo 4ns equivale a
un error en la distancia satélite-receptor del orden de 1 metro. A pesar de que los satélites llevan a bordo relojes
atómicos de gran estabilidad, el segmento de control ha de realizar un seguimiento de ellos para calcular las
desviaciones que muestran respecto al patrón de tiempos GPS, información que, conjuntamente con las
efemérides, radian moduladas en las señales que emiten. Sin embargo, la posibilidad de incorporar relojes de gran
precisión a los equipos receptores de estas señales no es viable ya que, además de restarles movilidad, los
encarecerían enormemente. La única solución consiste en añadir una incógnita más al sistema, el error del reloj
del receptor, lo que incrementa a cuatro el número mínimo de satélites en vista para determinar la posición del
receptor.
Si hay más de 4 satélites visibles se calculan las pseudodistancias respecto a todos los satélites visibles,
obteniendo así un sistema con más ecuaciones que incógnitas, lo que simplifica el cálculo de la posición. El
sistema está diseñado para que sobre cualquier punto de la superficie terrestre haya al menos 4 satélites visibles.
El sistema GPS además de la posición nos ofrece una referencia temporal muy exacta, esto permite:
•
Sincronizar los relojes locales (esto tiene muchas aplicaciones, p.ej. sincronización en
transmisiones...).
•
Posibilidad de medir la velocidad a la que se desplaza el usuario a través del desplazamiento
Doppler.
El tiempo de retardo se estima de dos maneras básicas: mediante el código y mediante la fase.
3.10.1. PSEUDO RANGO SOBRE EL CÓDIGO.
Para obtener posiciones en tiempo real, las señales emitidas por el satélite deben ser moduladas: la
sinusoide pura debe ser alterada de forma que puedan hacerse medidas del retardo del tiempo. Esto se realiza
modulando la fase de las ondas a transmitir con códigos, que consisten en secuencias de valores binarios que a
primera vista parecen haber sido elegidos aleatoriamente. Tales secuencias se llaman Ruido Pseudo Aleatorio
(PRN). Independientemente, se replican las mismas secuencias del código en el receptor. Alíneando la secuencia
replicada con la recibida y conociendo el instante en que la señal fue emitida por el satélite, puede calcularse el
tiempo del viaje y, así estimarse la distancia. Cada satélite genera su propio código único, ortogonal al del resto,
con lo que es sencillo para un receptor identificar que señal viene de cada satélite incluso cuando llegan señales de
varios satélites a su antena simultáneamente. A tales medidas se las conoce como pseudo rango y no son más que
la diferencia entre el tiempo de recepción de la señal en el receptor y el de emisión en el satélite, escalados por la
velocidad de la luz en el vacío (299.792.458 m s−1) 23
22
23
GPS posicionamiento global-Huerta, Mangiaterra, Noriega.
Teunissen y Kleusberg, 1998b.
- 43 -
La señal GPS se emite en dos frecuencias y sobre cada una de ellas se modula un código (C/A sobre L1 y
el código P sobre ambas). En total, tenemos tres tipos de observables de pseudo rango: C1, P1 y P2.
3.10.2. FASE DE LA PORTADORA.
La fase de la portadora también se puede utilizar para medir el tiempo de retardo de la señal. Esta medida
se realiza a partir de la diferencia entre la fase que genera nuestro receptor en el momento de la recepción de la
señal y la fase generada por el satélite en el momento de la transmisión. Aunque la fase de un ciclo particular de
una onda pueda medirse con mucha precisión, cada ciclo particular es como el siguiente, con lo que no es posible
saber exactamente cuantos ciclos hay entre el satélite y el receptor. De modo que para relacionar esta diferencia
de fases con el camino recorrido por la señal, hemos de añadir un número entero de longitudes de onda
(ambigüedad de fase).
Dado que tenemos dos frecuencias, podremos medir la fase en cualquiera de las dos: L1 y L2.
3.10.3. MENSAJE DE NAVEGACIÓN (NAV DATA)
El mensaje de navegación está constituido por los siguientes elementos:
•
Efemérides (son los parámetros orbitales del satélite).
•
Información del tiempo (horario) y estado del reloj del satélite.
•
Modelo para corregir los errores del reloj del satélite.
•
Modelo para corregir los errores producidos por la propagación en la ionosfera y la troposfera.
•
Información sobre el estado de salud del satélite.
•
Almanaque, que consiste en información de los parámetros orbitales (constelación de satélites).
Se transmite a un régimen binario de 50 bps y se tarda 12 min. 30 seg. en enviarlo completamente.
3.11.
FUENTES DE ERROR
3.11.1. INTRODUCCIÓN
El error del NAVSTAR-GPS se expresa como el producto de dos magnitudes, a saber:
•
•
UERE: es el error equivalente en distancia al usuario, se define como un vector sobre la línea vista
entre el satélite y el usuario resultado de proyectar sobre ella todos los errores del sistema.
o
Este error es equivalente para todos los satélites.
o
Se trata de un error cuadrático medio.
DOP (Dilution Of precisión): depende de la geometría de los satélites en el momento del cálculo
de la posición. No es lo mismo que los 4 satélites estén muy separados (mejor precisión) que los
satélites están más próximos (menor precisión). El DOP se divide en varios términos:
o
GDOP (Geometric DOP), suministra una incertidumbre como consecuencia de la
posición geométrica de los satélites y de la precisión temporal.
o
PDOP (Position DOP), incertidumbre en la posición debida únicamente a la posición
geométrica de los satélites.
o
HDOP (Horizontal DOP), incertidumbre en la posición horizontal que se nos da del
usuario.
o
VDOP (Vertical DOP), suministra una información sobre la incertidumbre en la posición
vertical del usuario.
- 44 -
Figura 3.6: GDOP pobre
Figura 3.7: GDOP bueno
Estos errores se corrigen a través de diferentes modelos que son transmitidos en el mensaje de navegación
a los usuarios.
Las fuentes de error son la principal limitación de la precisión que se puede adquirir a través de medidas
GPS. Para los observables básicos, se distinguen las siguientes fuentes de error:
3.11.2. ERRORES EN LAS POSICIONES DE LOS SATÉLITES
Los parámetros de las órbitas como así también el error del reloj que transmite cada satélite GPS, son
extrapolaciones realizadas por la estación de control a partir de estimaciones previas. Están sujetas, por tanto, a
errores en la estimación y a errores de la extrapolación, mayores estos últimos cuanto mayor es el intervalo de
tiempo entre la estimación y la extrapolación. En términos cuadráticos medios, estos errores pueden llegar a ser de
unos 3 metros. Una manera de reducir esta fuente de error es emplear efemérides precisas calculadas con más
tiempo de datos pero accesibles con posterioridad a la fecha de observación. 24
¿Pero como se explica este efecto?
Los satélites se desvían de las órbitas calculadas por diferentes razones, sufriendo una serie de
perturbaciones con respecto a la posición teórica que deberían de ocupar, entre estas podemos citar:
24
•
Por la variación del campo gravitatorio y anomalías gravitacionales originadas por el efecto de
terceros cuerpos tal que el Sol, la Luna y residualmente sin significación práctica otros planetas y
cuerpos celestes, o debido a las irregularidades y variaciones del campo gravitatorio terrestre,
consecuencia de su falta de homogeneidad y de los efectos de marea generados por la atracción
conjunta lunisolar.
•
Debido a variaciones en la presión de la radiación solar: Su efecto, resultante de la diferencia entre
la cantidad de radiación incidente y la reflejada, es directamente proporcional a la sección del
satélite (o proyección en la dirección de la radiación), e inverso a su masa. Los satélites más
sensibles a este efecto son el tipo Globo, como los ECO, de gran sección y baja masa. En general,
también depende de la orientación, intensidad y distribución espacial y espectral de la radiación
incidente y de las propiedades ópticas de la superficie. Las principales fuentes de radiación que
generan presión en un satélite son: la solar directa, la solar reflejada por la Tierra y su atmósfera
(albedo) y la térmica emitida por la Tierra y su atmósfera. Todo ello hace que, si deseamos
establecer la posición de un satélite con una gran precisión, las efemérides necesarias no pueden
limitarse a las keplerianas (o alternativamente a sólo 6 básicas).
•
Debido a la fricción del satélite con moléculas libres: Aunque ya a 1.000 Km. de altitud la
atmósfera es prácticamente inexistente, aún hay moléculas en flujo libre que hacen degenerar la
órbita por rozamiento. Los satélites de órbita baja (tipo 1.000 Km. o menor) son claramente
afectados. En general su efecto depende de la velocidad, altura, geometría y características
superficiales del satélite, y de la densidad y temperatura atmosférica.
Misra y Enge, 2001
- 45 -
Se ha estimado que las efemérides calculan la posición de los satélites con una precisión de 20 metros.
Para disminuir (e incluso evitar) esta fuente de error se han construido varios algoritmos basados en datos
experimentales (empíricos), los coeficientes de estos algoritmos se transmiten al usuario a través del mensaje de
navegación para que se reduzca el error debido a esta fuente de error.
3.11.3. ERROR DEL RELOJ DEL SATÉLITE.
Como ya se menciono el error del reloj que transmite cada satélite GPS son extrapolaciones realizadas por
la estación de control, esto es debido a que los satélites emplean relojes atómicos muy precisos, pero con el paso
del tiempo pueden presentar alguna deriva. En el mensaje de navegación uno de los parámetros que se enviaban
era el estado del reloj del satélite para tener controlado su funcionamiento.
Debido a que el satélite está situado en un campo gravitatorio más débil se produce un adelanto del reloj y
como consecuencia de la mayor velocidad que lleva el satélite se produce un retraso del reloj. Sobre estos dos
efectos predomina el adelanto, por esto se diseñan para que en la superficie terrestre atrasen y al ponerlos en
órbita funcionen bien, pero no se consigue totalmente debido a efectos relativistas. Todos los coeficientes se
envían al usuario a través del mensaje de navegación y así la corrección de esta fuente de error es casi total.
3.11.4.
ERRORES ASOCIADOS AL MEDIO EN EL QUE SE PROPAGA LA SEÑAL.
La presencia de un medio distinto al vacío provoca que la diferencia de tiempos entre la emisión y
acepción de la señal no dé una medida directa de la distancia entre ambos. La atmósfera terrestre influye tanto en
la velocidad de propagación de las señales como en su trayectoria. La influencia de la atmósfera se suele dividir
en dos partes: el efecto de la atmósfera neutra y el de la atmósfera ionizada. El primero se produce en aquellas
zonas de mayor densidad de gas neutro, esto es, en las proximidades de la superficie terrestre, principalmente en
la zona conocida como Tropósfera. El efecto de la componente ionizada del gas atmosférico se concentra en
capas un poco superiores de la atmósfera, típicamente a partir de los 50 Km. de altitud, comienzo de la Ionósfera.
El principal efecto de la Troposfera consiste en aumentar el tiempo de propagación de las señales,
haciendo aumentar la distancia satélite-receptor aparente entre 2,5m y 25m. 25
Figura 3.8: Errores de la señal por Ionosfera y Troposfera.
Sin embargo, la Ionosfera afecta de manera distinta a las medidas de fase y código, acortando la distancia
aparente para las primeras y aumentándola para las segundas. El efecto puede variar entre pocos metros y hasta
100 metros. Para corregir este error los receptores civiles (códigos C/A y 1 sola frecuencia) usan modelos
empíricos caracterizados por parámetros dependientes de la hora, latitud, estación... Todos estos parámetros se
25
Misra y Enge, 2001.
- 46 -
transmiten en el mensaje de navegación. Para los receptores que usan las dos frecuencias el método para corregir
este error es más eficaz.
3.11.5. ERRORES ASOCIADOS AL EFECTO DE CAMINO MÚLTIPLE (Multipath).
Se incluyen aquí los relacionados con el hecho de que la señal puede llegar a la antena del receptor por
más caminos que el rayo directo. La señal puede, por ejemplo, rebotar en un objeto próximo y llegar más atenuada
a la antena un poco mas tarde que el rayo directo, lo que afectaría a ambos tipos de medidas, de código y fase.
Este error puede variar entre 1m y 5m para las primeras y entre 1cm y 5cm para las segundas. 26
Figura 3.9: Errores de la señal por Multipath.
Como calcular este efecto, bueno los presentamos con fórmulas de la siguiente manera:
mp1. 'mp1' es el efecto medido en metros de multicamino ('multipath') sobre L1, calculado como:
Siendo: P la observación de seudo-distancia y φ la observación de la fase portadora,
Para f1 y f2 frecuencias de φ1 y φ2, respectivamente. mp2. 'mp2' es el efecto (en metros) de 'multipath' sobre L2,
computado según:
27
3.11.6. ERRORES ASOCIADOS A LA MEDIDA DEL RECEPTOR.
Normalmente se conocen bajo el nombre de ruido del receptor, que incluye errores asociados a
radiaciones no relacionadas con las señales GPS que llegan a la antena del receptor, problemas con los
amplificadores, cables, interferencias y otros efectos no modelados. Este ruido es altamente dependiente del
modelo de receptor y del tipo de medida. Típicamente, para las medidas de código están entre 10cm y 3m, según
el código empleado (P ó C/A) y 0,5mm y 5mm para las de fase. 28
26
Misra y Enge, 2001.
27
Universidad de San Juan, Argentina
Hofmann-Wellenhof, 1994.
28
- 47 -
3.11.7. DISPONIBILIDAD SELECTIVA
La disponibilidad selectiva fue eliminada el 2 de Mayo del 2000. Estuvo motivada por la excesiva
precisión obtenida por los receptores civiles, por esto se decide degradar esta precisión. Esto se hace de dos
formas:
•
Haciendo oscilar el reloj del satélite.
•
Manipulando los datos enviados por las efemérides de los satélites.
Figura 3.10: Disponibilidad Selectiva.
Con esto se consigue degradar el UERE hasta 37,5 metros. Los recetores militares van a disponer de los
modelos de errores introducidos y ellos tendrán la precisión inicial del sistema (UERE = 66,6 m).
En la figura 3.10 está la comparativa tomada en la Estación de Referencia de Hartsville, Tennessee,
durante un periodo de 6,5 horas (7:30 – 14:00 hs UTC), donde se puede ver que se pasa de 50 metros a 5 metros
de precisión.
3.12.
DGPS (GPS diferencial)
Se construyó principalmente por la introducción de la disponibilidad selectiva. Es un sistema a través del
cual se intenta mejorar la precisión obtenida, a través del sistema GPS.
El fundamento radica en el hecho de que los errores producidos por el sistema GPS afectan por igual (o de
forma muy similar) a los receptores situados próximos entre si. Los errores están fuertemente relacionados a los
receptores próximos. El GPS Diferencial consigue eliminar la mayoría de los errores naturales y causados por el
usuario que se infiltran en las mediciones normales con el GPS.
Estos errores son pequeños, pero para conseguir el nivel de precisión requerido por algunos trabajos de
posicionamiento es necesario minimizar todos los errores por pequeños que sean. Si suponemos que un receptor
basándose en otras técnicas conoce muy bien su posición, si este receptor recibe la posición dada por el sistema
GPS será capaz de estimar los errores producidos por el sistema GPS. Si este receptor transmite la corrección de
errores a los receptores próximos a él estos podrán corregir también los errores producidos por el sistema.
Con este sistema DGPS se pueden corregir en parte los errores debidos a:
•
Disponibilidad selectiva.
•
Propagación por la ionosfera - troposfera.
- 48 -
•
Errores en la posición del satélite (efemérides).
•
Errores producidos por errores en el reloj del satélite.
3.12.1. ESTRUCTURA DEL DGPS
Para realizar esta tarea es necesario tener dos receptores operando simultáneamente. El receptor de
"referencia" permanece en su estación y supervisa continuamente los errores, y después transmite o registra las
correcciones de esos errores con el fin de que el segundo receptor (receptor itinerante que realiza el trabajo de
posicionamiento) pueda aplicar dichas correcciones a las mediciones que esta realizando, bien sea conforme las
realiza en tiempo real, o posteriormente. La estación monitora que conoce su posición con una precisión muy alta
y tiene:
•
Un receptor GPS.
•
Un microprocesador para calcular los errores del sistema GPS y para generar la estructura del
mensaje que se envía a los receptores.
Hay un canal de datos unidireccional hacia los receptores, por tanto:
•
Necesita un transmisor (estación monitora).
•
Los usuarios necesitarán un receptor para recibir estos datos.
En los mensajes que se envían a los receptores próximos se pueden incluir dos tipos de correcciones:
•
Una corrección directamente aplicada a la posición. Esto tiene el inconveniente de que tanto el
usuario como la estación monitora deberán emplear los mismos satélites, pues las correcciones se
basan en esos mismos satélites.
•
Una corrección aplicada a las pseudodistancias de cada uno de los satélites visibles. En este caso el
usuario podrá hacer la corrección con los 4 satélites de mejor SNR. Esta corrección es más
flexible.
El error producido por la disponibilidad selectiva varía incluso más rápido que la velocidad de
transmisión de los datos. Por ello, junto con el mensaje que se envía de correcciones también se envía el tiempo
de validez de las correcciones y sus tendencias. Por tanto, el receptor deberá hacer algún tipo de interpolación
para corregir los errores producidos.
3.12.2. PRINCIPIOS DE FUNCIONAMIENTO DEL DGPS
Este receptor estacionario (Base) es la clave de la precisión del DGPS, ya que reúne todas las mediciones
de los satélites sobre el horizonte en una sólida referencia local.
El receptor de referencia (Estación de Referencia), está situado en una posición fija determinada con
gran exactitud, recibe las mismas señales GPS que el receptor móvil (Rover), pero en vez de trabajar como un
receptor GPS normal aborda los cálculos en sentido inverso. En vez de usar las señales de tiempo para calcular su
posición, emplea su posición para calcular el tiempo.
La estación de referencia conoce de antemano los parámetros orbitales, donde se supone que los satélites
se han de localizar en el espacio y conoce exactamente sus coordenadas, es decir, puede calcular la distancia
teórica entre la estación de referencia y cada uno de los satélites sobre el horizonte.
Entonces, dividiendo esa distancia teórica por la velocidad de la luz en el vacío averigua el tiempo, en
otras palabras, cuanto debería haber tardado la señal en llegar hasta él. Después compara ese tiempo teórico con el
tiempo que realmente ha tardado. Cualquier diferencia existente corresponde al error o retraso de la señal del
satélite.
- 49 -
Figura 3.10: DGPS
Una vez calculado el error en la señal de cada satélite sobre el horizonte, los receptores de referencia
tienen que facilitar esta información a todos los receptores móviles de su zona de influencia, con el fin de que la
utilicen para corregir sus mediciones. Puesto que el receptor de referencia no tiene forma de saber cuales de los
satélites disponibles están siento utilizados en cada momento por los receptores móviles para calcular su posición,
debe analizar las señales de todos los satélites visibles y calcular sus errores instantáneos.
Después codificará esta información en un formato estándar y la transmitirá simultáneamente a todos los
receptores móviles. En tiempo real, las estaciones de referencia transmiten las correcciones a realizar a los
receptores del usuario, que también está leyendo directamente la señal GPS y toma dichas correcciones y las
aplica a sus medidas, con lo cual se mejora notablemente la precisión del sistema.
Los receptores móviles reciben la lista completa de factores de corrección y aplican las correcciones
pertinentes a las señales de los satélites que, en particular, están utilizando.
La manera de obtener las mediciones diferenciales depende del lugar del mundo donde estemos. En los
Estados Unidos, es fácil adquirir correcciones DGPS vía radio y con bastante calidad de forma gratuita. En
algunos países de Europa también es aplicable esta metodología.
En el caso concreto de España, existe en teoría un sistema de radiodifusión de correcciones DGPS
gestionado por el IGN y que se emite junto a la señal de Radio Nacional sobre FM, utilizando el sistema de
codificación de información RDS.
Sin embargo, las correcciones DGPS de Radio Nacional no están operativas para todo el país y a nivel
profesional los datos que poseemos indican que no es muy utilizado. Sí es bastante operativo el sistema en el caso
concreto de Cataluña, donde el ICC gestiona por su parte el sistema Rasant. Las precisiones utilizando DGPS vía
radio pueden ir de los 5 m a 1 m.
Otra manera de conseguir correcciones diferenciales es a través de la suscripción a un servicio de pago vía
satélite. En este caso las correcciones vienen proporcionadas por satélites geoestacionarios cuya señal cubren casi
todo el planeta. Servicios de este tipo son OmniStar® o LandStar® y dan servicio a casi cualquier país (salvo las
zonas de latitudes muy altas).
Las precisiones obtenidas vía satélite nos dan una resolución sobre el metro y tienen la enorme ventaja de
que las podemos recibir en cualquier sitio, sin necesidad de tener que cargar con una estación de referencia.
En aplicaciones GIS, la solución DGPS junto con un servicio de pago por satélite es muy apropiada, pues
nos permite cartografiar hasta escalas 1:5.000 y con servicio en tiempo real, con lo cual podemos interactuar con
nuestras bases de datos geográficas y capturar información de forma fácil y sencilla.
- 50 -
CAPITULO 4
3.12.3. COBERTURA Y PRECISIÓN DEL DGPS
Tiene una cobertura de 200 Km. en torno a la estación terrena. Esta zona es donde los errores están
fuertemente considerados. Se eliminan los errores del segmento espacial y de control. En cuanto al segmento de lo
usuarios se eliminan los efectos de la ionosfera y troposfera y el parámetro que más afecta es el ruido del receptor.
Se están desarrollando sistemas WADGPS (DGPS de área amplia) que no es otra cosa que un DGPS de gran
cobertura.
3.12.4. ERRORES DEL DGPS
MAGNITUD TIPICA DE LOS ERRORES (m)
Precisión por satélite
GPS Standard
GPS Diferencial
Relojes de los satélites
1.50
0.00
Errores de Orbita
2.50
0.00
Ionosfera
5.00
0.40
Troposfera
0.50
0.20
Ruido del receptor
0.30
0.30
Multipath
0.60
0.60
Disponibilidad
30.00
0.00
Selectiva
PRECISION TIPICA DE POSICION (m)
Horizontal
15 (antes 50)
1.30
Vertical
24 (antes 78)
2.00
3-D
28 (antes 93)
2.80
Tabla 3.12: Magnitud de los Errores
- 51 -
GLONASS (Global Orbiting Navigation Satellite System)
4.1. INTRODUCCION
El sistema de navegación global por satélite ruso es conocido por sus siglas
como GLONASS, que derivan de (Global'naya Navigatsionnaya Sputnikovaya
Sistema), es la contrapartida rusa al GPS, desarrollado en conjunto por el Ministerio
de Defensa Ruso, Academia de las Ciencias y la Armada Soviética.
El propósito oficial de este nuevo sistema era dotar de un posicionamiento
espacial y temporal, a parte la de perpetrar la medida de velocidad en toda la Tierra
así como en el espacio cercano, a un número ilimitado de usuarios bajo cualquier
circunstancia.
En 1972 se aprueba en el Comité del Partido Comunista Soviético y el Consejo de Ministros de la URSS
el plan de desarrollo de GLONASS. Pero su primer lanzamiento se realizo el 12 de Octubre de 1982 a cargo de la
nave El KOSMOS 1413, y el sistema GLONASS comenzó a operar oficialmente el 24 de Septiembre de 1993 por
decreto del Presidente de la Federación Rusa, Boris Yeltsin. Desde aquél primer lanzamiento hasta la actualidad,
la constelación ha ido pasando por diversas etapas. 29
4.2. HISTORIA
A fines de los 60s y principios de los 70s, surge como sustitución del sistema doppler TSIKADA, el
antiguo Ministro de Defensa Soviético desarrolló el Global Orbiting Navigation Satellite System (GLONASS).
De acuerdo con fuentes rusas, las propuestas soviéticas para el uso de navegación por satélite fueron
anteriores a la era espacial. Un grupo dirigido por el profesor Shebshaevich en Mozhaisky de la Academia de
Ingeniería de la Fuerza Aérea investigo la posibilidad de utilizar medios radioastronómicas de navegación en base
a aeronave. Los resultados de esta investigación fueron reportados en las conferencias Inter-Agencia en Octubre y
Diciembre de 1957. La generación de navegación por satélite se puso en marcha en 1967. Un año más tarde, la
investigación preliminar confirmó la viabilidad técnica del sistema de navegación por satélite mundial. El pleno
desarrollo del sistema de navegación por satélite mundial comenzó en la URSS ya en 1972.
Durante los 80s, la información acerca de GLONASS era escasa. No se sabía mucho de las órbitas de los
satélites ni de las señales usadas para transmisión de las señales de navegación. Pero actualmente, gracias a
estudios e investigaciones sobre este sistema, se dispone ya de gran cantidad de información. Rusia, a través del
RSF (Fuerzas Especiales Militares Rusas) y del CSIC (Coordinational Scientific Information Center) publica el
documento ICD (Interface Control Document).
Desde su inicio, el desarrollo de GLONASS corrió a cargo de Applied Mechanics NPO, contratista
principal, que desarrolló e implementó todo el sistema. Ha sido la compañía que ha diseñado los satélites y las
instalaciones para su lanzamiento, así como los centros de control automatizados.
En el año 1993, oficialmente el Gobierno Ruso colocó el programa GLONASS en manos de Fuerzas
Espaciales Militares Rusas. Este organismo es el responsable del desarrollo de satélites GLONASS, de su
mantenimiento y puesta en órbita, y certificación a los usuarios. Este organismo opera en colaboración con el
CSIC, como se menciono anteriormente, para la publicación de los documentos.
29
GPS & GLONASS María Paz Holanda Blas – Juan Carlos Bermejo Ortega
David García Álvarez – Sistema GNSS, 2008
russianspaceweb.com/uragan
- 52 -
Este documento es similar en estructura al Segmento Espacial del sistema NAVSTAR GPS, donde se
describe el sistema, sus componentes, estructura de la señal y el mensaje de navegación para uso civil.
El sistema se desarrolló en 3 fases:
•
Fase 1 (1983-1985): fase experimental del programa, en la que se refinó el concepto del sistema y
se pusieron en órbita seis satélites.
•
Fase 2 (1986-1993): se completa la constelación con 12 satélites, lo que lo hace operativo pero no
a nivel global.
•
Fase 3 (1993-1995): desarrollo de la constelación nominal de 24 satélites y finalización del
sistema.
Aunque el sistema se desarrolló entre 1982 y 1991, y se planeó para estar operativo completamente por
entonces, la caída de la Unión Soviética paralizó el desarrollo del sistema, que fue retomado por la Federación
Rusa, que lo declaró oficialmente operativo en 1993, si bien no fue hasta 1995 cuando se completó la
constelación. Sin embargo, debido a problemas económicos durante los años 1996 a 2002 Rusia fue incapaz de
mantener su propio sistema de navegación, manteniendo solamente ocho satélites operativos, lo que lo convirtió
en prácticamente un sistema inútil a nivel global.
4.3. CARACTERÍSTICAS DEL SISTEMA
En la actualidad, Rusia ha otorgado gran importancia al desarrollo de su GNSS, consciente de las ventajas
políticas y económicas que le otorga a un país poseer su propio sistema de navegación. Considerado como
patrimonio nacional ruso, el GLONASS ha de ser mantenido incondicionalmente por el Gobierno Ruso, que en la
actualidad busca ampliar el número de usuarios civiles de su sistema.
La constelación ha experimentado un gran progreso desde los años 1994 y 1995. Los planes de
GLONASS son ofrecer dos niveles de servicio:
•
El Channel of Standard Accuracy (CSA), similar al Standar Positioning Service (SPS) del
Sistema GPS, disponible para uso civil.
•
El Channel of High Accuracy (CHA), similar al Precise Positioning Service (PPS) del Sistema
GPS, disponible solo para usuarios autorizados.
La Organización Internacional de Aviación Civil (ICAO) aceptó formalmente en Julio 1996, el uso de
GLONASS/CSA para uso en aviación civil, como ya se hizo en 1994 con el GPS/SPS.
Al igual que en el sistema GPS, existen dos señales de navegación:
•
La señal de navegación de precisión estándar (SP)
•
La señal de navegación de alta precisión (HP)
La primera está disponible para todos los usuarios tanto civiles como militares que deseen emplearla en
todo el mundo, y permite obtener la posición horizontal con una precisión de entre 57 y 70 metros (99.7% de
probabilidad), la posición vertical con una precisión de 70 metros (99.7% de probabilidad), las componentes del
vector velocidad con precisión de 15 cm/s (99.7% de probabilidad) y el tiempo con precisión 1µs (99.7% de
probabilidad). Estas características pueden ser mejoradas empleando sistemas diferenciales similares a los
empleados con GPS y utilizando métodos especiales de medida (medida de fase).
4.3.1.
PLAN DE RENOVACIÓN
- 53 -
En la actualidad con el nuevo plan de modernización y restauración, coordinado por Roscosmos (Agencia
Espacial Rusa), prevé la modernización completa del sistema. Se pretenden alcanzar acuerdos internacionales de
cooperación para captar nuevos fondos, y se ha decidido promover el uso civil de GLONASS para la obtención de
futuros beneficios económicos. Además se van a firmar acuerdos internacionales para que sea compatible con
GPS y Galileo, y de esta manera lograr un GNSS robusto. 30
El plan de modernización consta de cuatro fases:
•
Primera fase (1982-2007): estado actual de GLONASS, todavía no es capaz de prestar una
Capacidad Inicial Operativa como GNSS.
•
Segunda fase (2003-2015): planificada a medio plazo, implica el lanzamiento de satélites más
modernos y el comienzo de la modernización del segmento de control, así como la puesta en
marcha de nuevos servicios a través de nuevas señales.
•
Tercera fase (2008-2025): pretende dotar de una Capacidad Plenamente operativa a GLONASS,
consolidar el desarrollo del mercado civil y completar los sistemas de aumento, así como la puesta
en marchas del servicio SoL.
•
Cuarta fase (2015-…): todavía no definido el plan más allá de 2025. Implicará el mantenimiento
del sistema existente.
4.4. COMPOSICIÓN DEL SISTEMA
El GLONASS al igual que el GPS se compone de tres segmentos, aunque el diseño adoptado para cada
uno de ellos es distinto que el de GPS, si bien guardan muchas similitudes:
•
Segmento espacial: constelación de satélites GLONASS. Originalmente se planteó una
constelación de 24 satélites.
•
Segmento de control: estaciones de control repartidas por el territorio ruso.
•
Segmento de usuario.
Figura 4.1: Composición del Sistema GLONASS
4.4.1.
30
SEGMENTO ESPACIAL
David García Álvarez – Sistema GNSS, 2008.
- 54 -
El segmento espacial de GLONASS, al día 13 de Febrero de 2012, está formado por una constelación de
31 satélites en órbita, estando 24 operativos que resultan dar la combinación más eficiente, dos temporalmente en
mantenimiento, uno en la etapa por entrar en el sistema, tres en una orbita de recerva y uno en la etapa de prueba
de vuelo31. Éstos están distribuidos en 3 planos orbitales separados 120º, que contienen 8 satélites a 19.100 Km.
de altura con una inclinación de 64.8º con respecto al Ecuador y se sitúan en orbitas casi circulares con semieje
mayor de aproximadamente 25.510 Km., siendo el periodo orbital de 675,8 min., o sea, que tarda 11 horas y 15
minutos en completar un período. Esto permite que sobre el 97% de la superficie terrestre se vean al menos 4
satélites de forma continua. La configuración del sistema GLONASS proporciona datos de navegación a usuarios
que se encuentren incluso por encima de los 2000 Km. sobre la superficie terrestre.
Si uno de los 24 satélites operativos se avería, el sistema baja al 94.7% su probabilidad de éxito. El
sistema de mantenimiento de la constelación prevé la activación de uno de los satélites en reserva o el
lanzamiento de 3 satélites para sustituir a los averiados o ser dejados en reserva para usos futuros.
Figura 4.2: Constelación GLONASS
PLANO 1
Satélite 01 02 03 04 05
Canal 02
PLANO 2
Satélite 09 10 11 12 13
06
Canal 06 09 04
PLANO 3
Satélite 17 18 19 20 21
Canal
06 07 08
14 15 16
11
22 23 24
10
Tabla 4.1: Planos del Sistema GLONASS
4.1.1.1.1.
SATÉLITES GLONASS
Al igual que con el GPS, se han ido desarrollando distintos vehículos espaciales que componen el
segmento espacial de GLONASS. Su desarrollo ha corrido a cargo de Applied Mechanics NPO en colaboración
con el Institute for Space Device Engineering Ruso, y una tercera compañía, el Russian Institute of Radio
Navigation and Time, ha sido la encargada de sincronización y desarrollo de otro equipo de apoyo.
Los planos se numeran del 1 al 3. Cada satélite, según el plano en el que esté, se enumera de 1 al 8, del 9
al 16 y del 17 al 24 respectivamente.
31
glonass-ianc.rsa.ru
- 55 -
Desde que se empezó a desarrollar el sistema en 1982 se han desarrollado cuatro modelos de satélites.
4.1.1.1.2.
Bloque I de satélites
La primera generación de satélites conocida como Block I se lanzó entre Octubre de 1982 y Mayo de
1985, diseñados con un tiempo de vida de 14 meses sirvieron como prototipos para la validación del GLONASS.
4.1.1.1.3.
Bloque II de satélites
Subdividido en distintos bloques, ha sido la más númerosa hasta ahora.
•
o
Entre Mayo de 1985 y Septiembre de 1986 se lanzaron 6 satélites del Bloque IIa, tenían nuevos
estándares de tiempo y frecuencia que mejoraban, con respecto de los prototipos, la estabilidad en
frecuencia. Además tenían un tiempo de vida mayor, de unos 16 meses.
o
El siguiente fue el Bloque IIb, con un total de 12 satélites lanzados entre Abril de 1987 y Mayo de
1988, de los cuales 6 se perdieron en fallos en el vehiculo por el lanzamiento, con un tiempo de vida
de 2 años y algunas mejoras.
o
El modelo actual es el Bloque IIv, constituido por 43 satélites, lanzados desde 1988 hasta fines de
1995 (14 de Diciembre de 1995), con un tiempo de vida de 3 años, han llegado a durar más de 65
meses en órbita apagándolos de manera temporal.
Uragan M
Constituyen la segunda generación de satélites
GLONASS. Han sido lanzados entre 2001 y 2007 un total de 14
lanzamientos programados.
El Gobierno Ruso desarrolló un nuevo prototipo de
satélites que iría sustituyendo a los antiguos para formar la nueva
Constelación GLONASS-M. Los test con los satélites
GLONASS-M comenzaron en 1996. Las principales
características de la Constelación GLONASS-M son:
•
•
La esperanza de vida de los satélites sería de 7 años, frente a los 3 años de los satélites de la
generación anterior.
•
Transmisión del código C/A en L2 para uso civil.
•
Estabilidad en los relojes de 1x10-13 seg. frente a la actual de 5x10-13 seg.
•
Mejora de las precisiones de las efemérides.
•
Capacidad del Sector de Control para establecer la mala salud de los satélites a los 10 seg. de
producirse el fallo.
•
Transmisión instantánea del desfase entre las escalas de tiempo GPS y GLONASS.
•
Reducción del rms (URE) a 5 m frente al valor actual de 10 m.
Uragan K
- 56 -
Es la tercera generación de satélites llamada GLONASS
K, con un tiempo de vida de 10 años con lanzamientos
programados para 2009, es más ligera e incluye mejoras con
respecto a su generación anterior.
Desde el primer satélite puesto en orbita, se han
realizado un total de 27 lanzamientos (2 de ellos fallidos con
fecha 24-4-1987 y 17-2-1988), poniendo en órbita un total de 73
satélites.
A continuación se detalla unas series de tablas indicando características principales de cada satélite
perteneciente a la red GLONASS.
Uragan
(11F654)
Uragan-M
(11F113)
GLONASS-K
GLONASS-K2
Peso
1.415
kilogramos
1.570 kg (1,4151,450 kg) *
745 kg (935 kg) ***
-
Carga útil de masas
180
kilogramos
250 kilogramos
260 kilogramos
-
A bordo de la fuente
de alimentación
1000 vatios
1450 vatios
1270 vatios
-
Carga útil el
consumo de energía
600 vatios
580 vatios
750 vatios
-
Actitud de precisión
en el control
0,5 grados
0,5 grados
0,5 grados
-
El panel solar
orientación de
precisión
5 grados
2 grados
1 grado
-
Vida Operativa
4 años
7 años
10 años **
-
2007 (originalmente), 2009 (a
finales de 2006) 2010 (a partir de
finales de 2009)
Previstos para el
año 2013
Primer lanzamiento
12 de Octubre 10 de Diciembre
de 1982
de 2003
Tabla 4.2: Características de satélites GLONASS
* De acuerdo con Roskosmos;
** A partir de 2009. Anteriormente, la expectativa de vida del Uragan-K fue citada en 12-15 años;
*** La masa original de 745 kilogramos demostró ser inalcanzable por el comienzo de las pruebas de vuelo en
2011.
Una lista completa de todos los lanzamientos en la constelación GLONASS:
Fecha de
lanzamiento
Tiempo de
lanzamiento
*
Hardware
nombre
Vehículo de Complejo de
lanzamiento Lanzamiento
Plataforma Lanzamiento
de
de los
lanzamiento
resultados
1
10/12/1982
17:57:00
Kosmos-1413
Kosmos-1414
Kosmos-1415
Proton-K
11S861
200
39
Éxito
2
8/10/1983
21:24
Kosmos-1490
Kosmos-1491
Kosmos-1492
Proton-K
11S861
200
39
Éxito
- 57 -
3
12/29/1983
03:52
Kosmos-1519
Kosmos-1520
Kosmos-1521
Proton-K
11S861
200
40
Éxito
4
5/19/1984
18:11
Kosmos-1554
Kosmos-1555
Kosmos-1556
Proton-K
11S861
200
40
Éxito
5
9/4/1984
18:50
Kosmos-1593
Kosmos-1594
Kosmos-1595 **
Proton-K
11S861
200
40
Éxito
6
5/18/1985
01:28
Kosmos-1650
Kosmos-1651
Kosmos-1651
Proton-K
11S861
200
39
Éxito
7
12/25/1985
Doce y
cuarenta y
tres
Kosmos-1710
Kosmos-1711
Kosmos-1712
Proton-K
11S861
200
39
Éxito
8
9/16/1986
14:38
Kosmos-1778
Kosmos-1779
Kosmos-1780
Proton-K
11S861
200
40
Éxito
4/24/1987
15:43
Kosmos-1838
Kosmos-1839
Kosmos-1840
Proton-K
11S861
200
40
Si no
(transición a la
competencia
en la órbita
elíptica con el
apogeo de
17.550
kilometros)
10 9/16/1987
05:54
Kosmos-1883
Kosmos-1884
Kosmos-1885
Proton-K
11S861
200
40
Éxito
9
11 2/17/1988
03:23
Kosmos-1917
Kosmos-1918
Kosmos-1919
Proton-K
11S861
200
39
Si no
(transición a la
competencia
en la órbita de
aparcamiento
inicial)
12 5/21/1988
20:57
Kosmos-1946
Kosmos-1947
Kosmos-1948
Proton-K
11S861
200
39
Éxito
13 9/16/1989
05:01
Kosmos-1970
Kosmos-1971
Kosmos-1972
Proton-K
11S861
200
39
Éxito
14 1/10/1989
05:05
Kosmos-1987
Kosmos-1988
Kosmos-1989
Proton-K
11S861
200
39
Éxito
15 5/31/1989
11:32
Kosmos-2022
Kosmos-2023
Kosmos-2024
Proton-K
11S861
200
40
Éxito
16 5/19/1990
12:33
Kosmos-2079
Kosmos-2080
Kosmos-2081
Proton-K
11S861
200
40
Éxito
17 12/8/1990
05:43
Kosmos-2109
Kosmos-2110
Proton-K
11S861
200
40
Éxito
- 58 -
Kosmos-2111
18 4/4/1991
13:47
Kosmos-2139
Kosmos-2140
Kosmos-2141
Proton-K
11S861
200
39
Éxito
19 1/30/1992
01:19
Kosmos-2177
Kosmos-2178
Kosmos-2179
Proton-K
11S861
81
23
Éxito
20 7/30/1992
04:59
Kosmos-2204
Kosmos-2205
Kosmos-2206
Proton-K
11S861
81
23
Éxito
21 2/17/1993
23:10
Kosmos-2234
Kosmos-2235
Kosmos-2236
Proton-K
11S861
81
23
Éxito
22 4/11/1994
10:49
Kosmos-2275
Kosmos-2276
Kosmos-2277
Proton-K
11S861
81
23
Éxito
23 8/11/1994
18:28
Kosmos-2287
Kosmos-2288
Kosmos-2289
Proton-K
11S861
81
23
Éxito
24 11/20/1994
03:40
Kosmos-2294
Kosmos-2295
Kosmos-2296
Proton-K
11S861
200
39
Éxito
25 3/7/1995
12:24
Kosmos-2307
Kosmos-2308
Kosmos-2309
Proton-K
11S861
200
39
Éxito
26 7/24/1995
18:52
Kosmos-2316
Kosmos-2317
Kosmos-2318
Proton-K
11S861
81
23
Éxito
27 12/14/1995
09:11
Kosmos-2323
Kosmos-2324
Kosmos-2325
Proton-K
11S861
200
39
Éxito
28 12/30/1998
21:35:46
Kosmos-2362
Kosmos-2363
Kosmos-2364
Proton-K
11S861
29 10/13/2000
17:12:44
Kosmos-2374
Kosmos-2375
Kosmos-2376
Proton-K
11S861
81
24
Éxito
30 12/1/2001
21:04:43
Kosmos-2380
Kosmos-2381
Kosmos-2382
(14F17)
Proton-K
11S861
81
24
Éxito
31 12/25/2002
10:37:58
Kosmos-2394
Kosmos-2395
Kosmos-2396
Proton-K
11S861
81
23
Éxito
32 12/10/2003
20:42:12
Kosmos-2402
Kosmos-2403
Kosmos-2404
ProtonM/Breeze-M
81
24
El éxito
(Uragan-M)
33 12/26/2004
16:54
Kosmos-2402
Kosmos-2403
Kosmos-2404
ProtonM/Briz-M
-
-
El éxito
(Uragan-M)
34 12/25/2005
08:07
GLONASS
Proton-K,
81
24
Éxito
Éxito
- 59 -
GLONASS-M
GLONASS-M
23:18
GLONASS-M
GLONASSM GLONASSM
36 10/26/2007
35 12/25/2006
Bloque D
ProtonK/Block D
81
24
Éxito
11:35
Kosmos-2431,
2432, 2433 /
Proton-K
GLONASS-M / DM Bloque
(N º 18, 19, 20)
-
-
Éxito
37 12/25/2007
22:32
Tres
Proton-M
GLONASS-M
/ DM Bloque
(N º 21, 22, 23)
81
-
Éxito
38 9/25/2008
12:49
Tres
GLONASS-M
Proton-M
/ DM Bloque
-
-
Éxito
39 12/25/2008
13:43
Tres
GLONASS-M
Proton-M
/ DM Bloque
-
-
Éxito
40 12/14/2009
13:38
Tres
Proton-M
GLONASS-M N
/ DM Bloque
º 30, 33, 34
81
-
Éxito
41 03/02/2010
00:19:44
Tres
Proton-M
GLONASS-M N
/ DM Bloque
º 31, 32, 35
81
-
Éxito
42 09/02/2010
04:53
Proton-M
/ DM Bloque
81
-
Éxito
43 12/05/2010
13:25:19
Proton-M
Tres
/ Block DM-3
GLONASS-M
(11? 861-03)
81
24
43 ***
4 ***
44 02/26/2011
06:07
Tres
GLONASS-M
Kosmos-2471
( GLONASSK 1 (núm.
11))http://www.ru
Soyuz-2.1b
Si no (no
alcanzó la
órbita)
-
ssianspaceweb.co
m/uragan_k.html
Tabla 4.3: Todos los satélites GLONASS
* Decreto hora de Moscú;
** Una carga útil de 04 de septiembre 1984, el lanzamiento fue un muñeco en masa y tamaño para el ensayo de
un sistema de separación.
*** Lanzamiento desde Plesetsk
La siguiente tabla describe la actual (Abril 2012) constelación de satélites operativos.
- 60 -
Punto
Nº pl.
número
La adecuación de la
Fecha de Fecha de
Hecho
nave informó
Número de
Fecha de entrada retirada
Nku
Sustantivo
encendido.
lanzamiento en el
del
(Meses) Almanaque efemérides
sistema sistema
(UTC)
Nota
A
A
01
730
12/14/09
01/30/10
26,0
+
+ 13.02.12
16:01
Se utiliza para CI
2
A
-4
728
12/25/08
01/20/09
37,6
+
+ 13.02.12
16:00
Se utiliza para CI
3
A
05
744
04/11/11
12/08/11
3.3
+
+ 13.02.12
16:01
Se utiliza para CI
4
A
06
742
10/02/11
25/10/11
4.4
+
+ 13.02.12
14:59
Se utiliza para CI
5
A
01
734
12/14/09
10/01/10
26,0
+
+ 13.02.12
14:59
Se utiliza para CI
6
A
-4
733
12/14/09
01/24/10
26,0
+
+ 13.02.12
14:59
Se utiliza para CI
7
A
05
745
04/11/11
18/12/11
3.3
+
+ 13.02.12
14:59
Se utiliza para CI
8
A
06
729
12/25/08
02/12/09
37,6
+
+ 13.02.12
15:45
Se utiliza para CI
9
2
-2
736
09/02/10
04/10/10
4,17
+
+ 13.02.12
14:59
Se utiliza para CI
10
2
-7
717
12/25/06
04/03/07
61,7
+
+ 13.02.12
16:00
Se utiliza para CI
11
2
00
723
25/12/07
01/22/08
49,7
+
+ 13.02.12
16:00
Se utiliza para CI
12
2
-1
737
09/02/10
10/12/10
4,17
+
+ 13.02.12
16:00
Se utiliza para CI
13
2
-2
721
25/12/07
08/02/08
49,7
+
+ 13.02.12
16:00
Se utiliza para CI
14
2
-7
715
12/25/06
04/03/07
61,7
+
+ 13.02.12
14:59
Se utiliza para CI
15
2
00
716
12/25/06
12/10/07
61,7
+
+ 13.02.12
14:59
Se utiliza para CI
16
2
-1
738
09/02/10
10/11/10
4,17
+
+ 13.02.12
14:59
Se utiliza para CI
17
3
04
746
28/11/11
12/23/11
2.5
+
+ 13.02.12
14:45
Se utiliza para CI
18
3
-3
724
25/09/08
26/10/08
40,6
+
+ 13.02.12
15:00
Se utiliza para CI
19
3
03
720
10/26/07
11/25/07
51,6
+
+ 13.02.12
15:30
Se utiliza para CI
20
3
02
719
10/26/07
11/27/07
51,6
+
+ 13.02.12
16:01
Se utiliza para CI
21
3
04
725
25/09/08
11/05/08
40,6
+
+ 13.02.12
14:59
Se utiliza para CI
22
3
-3
731
03/02/10
03/28/10
4,23
+
+ 13.02.12
14:59
Se utiliza para CI
23
3
03
732
03/02/10
03/28/10
4,23
+
+ 13.02.12
14:59
Se utiliza para CI
24
3
02
735
03/02/10
03/28/10
4,23
+
+ 13.02.12
14:59
Se utiliza para CI
2
A
-4
743
04/11/11
3.3
En la etapa de puesta en
- 61 -
marcha
21
3
701
26/02/11
6,11
En el escenario, Lee
14
2
722
25/12/07
25/01/08 12/10/11
49,7
Orbital de reserva
7
A
712
26/12/04
07/10/05 14/12/11
85,6
Orbital de reserva
17
3
714
25/12/05
31/08/06 19/12/11
73,7
Orbital de reserva
3
A
727
12/25/08
17/01/09 08/09/10
37,6
22
3
726
25/09/08
13/11/08 08/31/09
40,6
SC en
issled. Cap.Diseñador
SC en
issled. Cap.Diseñador
Tabla 4.4: Satélites actualmente operativos
4.1.1.1.4.
COMPOSICIÓN DE LA CONSTELACIÓN GLONASS PARA 13-02-2012.
En total, OG GLONASS
Se utiliza para la finalidad prevista
En la etapa de entrar en el sistema
Retirada temporal por mantenimiento
En la etapa de la retirada del sistema
Orbital reserva
31 SC
24 SC
1 kA
2 kA
1 kA
3 kA
Tabla 4.5: Resumen de Satélites 32
Figura 4.3: Tipos de Satélites GLONASS
4.4.2.
SEGMENTO DE CONTROL
El Sector de Control está formado por un Sistema Central de Control (SCC) en la región de Moscú
(Golitsyno-2) y una red de estaciones de seguimiento y control (TT&C Telemetry, Tracking and Control),
emplazadas por todo el área alrededor de Rusia. El Sector de Control GLONASS, al igual que el de GPS debe
seguir y vigilar el estado de sus satélites, determinar las efemérides y errores de los relojes de los satélites, es
32
glonass-ianc.rsa.ru
russianspaceweb.com/uragan.html
- 62 -
decir, la diferencia entre el tiempo GLONASS y la escala de tiempo UTC (SU). Además también deben actualizar
los datos de navegación de los satélites. Estas actualizaciones se realizan dos veces al día.
El segmento de control lleva a cabo las siguientes tareas:
•
Monitorización del normal funcionamiento de la constelación orbital de satélites.
•
Ajuste de parámetros orbitales de los satélites de forma continúa.
•
Generación y carga de programas, comandos de control, e información especial.
Las estaciones de control (TT&C) realizan el seguimiento de los satélites y almacenan los datos de
distancias y telemetría a partir de las señales de los satélites. La información obtenida en las estaciones de control
es procesada en el Sistema Central de Control (SCC) para determinar los estados de las órbitas y relojes de los
satélites, y para actualizar el mensaje de navegación de cada satélite. Esta información es enviada a cada satélite
por medio de las TT&C, las cuales calibran periódicamente los datos de distancias a los satélites mediante láser.
Para ello, los satélites GLONASS van provistos de unos reflectores especiales.
Figura 4.4: Segmento de Control del Sistema GLONASS
SCC:
TT & C:
ULS:
MS:
CC:
SLR:
Sistema de supervisión
Telemetría, Seguimiento y Control
Uplink estación
Estación de monitoreo
Reloj central
Estación de seguimiento láser
La sincronización de todos estos procesos en el Sistema GLONASS es muy importante. Para conseguir
esta sincronización, se dispone de un reloj atómico de hidrógeno de alta precisión, el cual determina la escala de
tiempo GLONASS. Los satélites GLONASS llevan a bordo un reloj de Cesio y se sincronizan respecto a la State
Etalon UTC (CIS) en Mendeleevo, a través de la escala de tiempo del sistema GLONASS.
A todas estas estaciones de control debemos añadir otras estaciones de seguimiento que se utilizan para
obtener los parámetros de transformación del Sistema GLONASS PZ-90 al Sistema GPS WGS-84, además de la
determinación de las órbitas y observación y análisis de las anomalías de los satélites. Estos parámetros de
transformación se aplican cuando se trabaja con el sistema combinado GPS/GLONASS. Estas estaciones están
repartidas por todo el mundo y utilizan técnicas láser, radar y ópticas. Estos parámetros son calculados por
mínimos cuadrados utilizando 9 días de datos de seguimiento.
La calidad de las posiciones estimadas obtenidas a partir de GLONASS es comparable a la que se obtiene
con GPS cuando la Disponibilidad Selectiva está desactivada. El valor del rms (URE) en la determinación de las
órbitas para GLONASS es de aproximadamente 10 m.
El Gobierno de la Federación Rusa ha declarado que GLONASS proporcionará a los usuarios civiles una
precisión en toda la Tierra para el posicionamiento absoluto en tiempo real basado en medidas de código de unos
- 63 -
60 m en horizontal (99,7%) y de unos 75 m en vertical (99,7%). Los rusos han anunciado que no tienen previsto
introducir ninguna medida intencionada de degradación de la precisión del sistema.
Las estaciones de control de las Fuerzas Espaciales Rusas (RSF) publican unos boletines, llamados
NAGUSS para los usuarios GLONASS con noticias, estado y anomalías del sistema, para así anunciar la
inutilidad de alguno o varios satélites. Otras organizaciones, como GLONASS Group del Laboratorio de Lincoln
de Massachusetts o el DLR-DFD Neustrelitz Remote Sensing Ground Station en Alemania, también controlan la
actividad de GLONASS.
Las anomalías se producen cuando los parámetros que manda el satélite en su mensaje de navegación son
incorrectos y el parámetro de salud indica que está sano. El resultado es una incorrecta pseudodistancia y trae
consigo posicionamientos incorrectos. Las anomalías del sistema se determinan por medio de las estaciones de
control, que hacen uso del algoritmo RAIM. Esto consiste en receptores autónomos de seguimiento íntegro que
detectan anomalías en la transmisión de datos, aún figurando un buen estado de salud en los mensajes de
navegación y almanaques. Además, si un receptor dispone de este algoritmo RAIM puede detectar fácilmente
estas anomalías.
4.4.3.
SEGMENTO USUARIO
El Sistema GLONASS es un sistema militar y civil. Todos los usuarios militares y civiles constituyen el
Sector Usuario. El desarrollo y diseño de nuevos receptores por parte de los fabricantes está en continua
evolución.
Un equipo de recepción de señales GLONASS, al igual que uno de GPS, está formado por una antena y
un receptor. La antena suele llevar un plano de tierra para evitar el efecto multipath, es decir, la recepción de
señales reflejadas en el suelo u otros objetos, que empeoran la precisión. Los receptores disponen de un reloj para
sincronizar las señales recibidas.
4.5. SISTEMA DE REFERENCIA: DATUM PZ-90
Las efemérides GLONASS están referidas al Datum Geodésico Parametry Zemli 1990 o PZ-90, o en su
traducción Parámetros de la Tierra 1990 o PE-90.
Este sistema reemplazó al SGS-85 (Soviet Geodetic System-1985), usado por GLONAS hasta 1993.
El sistema PZ-90 es un sistema de referencia terrestre con coordenadas definidas de la misma forma que
el Sistema de Referencia Internacional Terrestre (ITRF, International Terrestrial Reference Frame). Las
constantes y parámetros del PZ-90 se muestran en la tabla 4.6.
La realización del Sistema PZ-90 por medio de la adopción de coordenadas de estaciones de referencia ha
dado como resultado el desfase en el origen y orientación de los ejes, así como la diferencia en escala con
respecto al ITRF y al Sistema WGS-84 también. Tema que se abordara en el capitulo 7.
PARÁMETROS
Rotación de la Tierra
Constante Gravitacional
Constante Gravitacional de
la Tierra
Velocidad de la Luz
Semieje Mayor de
Elipsoide
Aplanamiento del Elipsoide
Aceleración de la
Gravedad en el Ecuador
VALORES
72,92115 x 10-6 rad/seg.
398.600,44 x 109 m3/seg2
0,35 x 109 m3/seg2
299.792.458 m/seg.
6.378.136 m
1 / 298,257839303
978.032,8 mgal
Tabla 4.6: Parámetros de PZ 90
- 64 -
4.6. FUNCIONAMIENTO DE GLONASS
Para realizar posicionamiento en 3D, medir velocidades y realizar referencias de tiempo, el sistema
GLONASS emplea radioseñales transmitidas de forma continua por satélites. Cada satélite de la constelación
transmite dos tipos de señal: L1 de precisión estándar (SP) y L2 de alta precisión (HP). Se emplea el sistema de
múltiple acceso por división en frecuencia. Esto significa que cada satélite transmite señales en su propia
frecuencia, lo que permite su identificación.
Las frecuencias de estas portadoras vienen dadas por la expresión:
f = (178,0 +
k
) × Z ( MHz )
16
Donde:
•
K es un valor entero entre -7 y +12
•
Z = 9 para L1
•
Z = 7 para L2
Con lo que la separación entre frecuencias contiguas es de 0,5625 MHz para L1 y 0,4375 MHz para L2.
Los valores empleados para K son:
•
Hasta 1998: entre 0 y 12
•
De 1998 hasta 2005: entre -7 y 12
•
A partir del 2005: entre -7 y 4
Si bien estos valores pueden ser modificadas en circunstancias excepcionales. Existen satélites que
transmiten a la misma frecuencia, pero están situados en las antípodas (diametralmente opuesto), por lo que no
pueden ser “vistos” simultáneamente por un usuario.
El receptor GLONASS recibe señales de navegación de al menos cuatro satélites y mide sus
pseudodistancias y velocidades. Simultáneamente selecciona y procesa el mensaje de navegación incluido en la
señal de navegación. El ordenador del receptor procesa toda la información recibida y calcula las tres coordenadas
de posición, las tres componentes del vector velocidad y el tiempo.
4.7. SISTEMAS DE TIEMPO GLONASS
Todos los satélites del sistema GLONASS están equipados con relojes de Cesio que son corregidos dos
veces al día, lo que permite una precisión de 15 nanosegundos en la sincronización de tiempos de los satélites
respecto al Sistema de Tiempos GLONASS.
El Sistema de Tiempos GLONASS (GLONASST) es generado en la Central de Sincronización de
Tiempos de Moscú, cuyos relojes de hidrógeno tiene una variación diaria inferior a 5 x 10-14 seg. El sistema
GLONASS proporciona referencias de tiempo en GLONASST, mantenido en Moscú y en el sistema UTC (CIS),
mantenido en el Centro Meteorológico Principal del Servicio Ruso de Tiempos y Frecuencias de Mendeleevo
(VNIIFTRI).
La introducción del UTC en lugar del TAI (Tiempo Atómico Internacional) se debe a que el TAI es un
sistema de tiempo continuo que no tiene en cuenta la disminución de la velocidad de la tierra respecto al Sol, que
en la actualidad implica 1 segundo al año, lo que significaría un problema para la sincronización con el día solar.
El tiempo GPS (GPST) no es incrementado un segundo cada año, por lo que la diferencia de tiempos
GLONASS y GPS no es igual cada año.
- 65 -
4.8. CÓDIGOS DEL SISTEMA GLONASS
Al igual que el sistema GPS, cada satélite modula su frecuencia portadora L1 con dos cadenas de
secuencias PRN (Código C/A para uso civil y código P para uso militar) sumadas “módulo 2” con el mensaje de
navegación.
La portadora L2 es modulada exclusivamente por la suma “módulo 2” del código P y el mensaje de
navegación.
Los códigos C/A y P son iguales para todos los satélites, por lo que no permiten la identificación de los
satélites como ocurre en GPS.
A diferencia del GPS, el GLONASS emplea dos mensajes de navegación diferentes que van sumados en
modulo 2 a los códigos C/A y P respectivamente. Ambos mensajes de navegación son transmitidos a 50 bps, y su
función primaria es la de proporcionar información a cerca de las efemérides de los satélites y la distribución de
los canales.
La información contenida en las efemérides permite al receptor GLONASS conocer exactamente la
posición de cada satélite en cada momento.
4.9. ERRORES DEL SISTEMA GLONASS
Los sistemas GPS y GLONASS están sujetos a varios errores que afectan la precisión de la posición
calculada. Estos errores en conjunto pueden estar en el rango de 10 á 25 metros, dependiendo del tipo de receptor,
la posición relativa del satélite y la magnitud de otros errores.
4.9.1.
ERROR IONOSFÉRICO.
El error más significativo se ocasiona durante el paso de la señal del satélite a través de la ionosfera de la
Tierra. La ionosfera es una capa de partículas cargadas eléctricamente, que cubre a la tierra entre
aproximadamente 130 y 190 Km. sobre la superficie. Al desplazarse las señales de radiofrecuencia a través de la
ionosfera, se hacen más lentas en una magnitud que varía dependiendo de la hora del día, la actividad solar y otros
factores.
4.9.2.
ERROR ATMOSFÉRICO.
Se introduce otro error cuando la señal pasa a través de la atmósfera. El vapor de agua de la atmósfera
hace más lentas a las señales de radiofrecuencia y reduce adicionalmente la exactitud del sistema.
4.9.3.
DISPONIBILIDAD SELECTIVA.
El Gobierno de la Federación Rusa ha declarado que GLONASS proporcionará a los usuarios civiles una
precisión en toda la Tierra para el posicionamiento absoluto en tiempo real basado en medidas de código de unos
60 m en horizontal (99.7%) y de unos 75 m en vertical (99.7%).
Los rusos han anunciado que no tienen previsto introducir ninguna medida intencionada de degradación
de la precisión del sistema.
Con la SA activada la precisión del sistema GLONASS es superior a la del sistema GPS como lo
muestran las figuras a continuación.
- 66 -
Figura 4.5: Distorsión horizontal, en la medición de una posición.
Figura 4.6: Distorsión vertical, en la medición de una posición.
4.9.4.
ERROR DEL RECEPTOR.
El receptor de a bordo puede introducir una cierta cantidad de error durante las diversas etapas del
procesamiento de las señales recibidas de los satélites. Estos errores pueden ser causados por el ruido térmico, la
precisión del software, y el error de vías entre canales de recepción.
- 67 -
4.9.5.
ERROR DE EFEMÉRIDES (POSICIÓN) DEL SATÉLITE.
Este error se refiere a que un satélite puede estar realmente en una posición un poco distinta a la que viene
transmitiendo hacia los receptores.
4.9.6.
DILUCIÓN DE PRECISIÓN (DOP) POR POSICIÓN.
La geometría posicional de los satélites que se están utilizando para determinar la ubicación del receptor
influye grandemente en la exactitud de los cálculos de la posición.
Cuando se requiere de mayor exactitud se recurre a diferentes técnicas de corrección diferencial (o
aumentación), los cuales comparan la posición calculada versus la posición real de un punto de referencia
(medido) obteniéndose una cantidad de error que es retransmitida (generalmente por radiofrecuencias) a los
usuarios para que se hagan los ajustes del caso.
Dependiendo de la técnica utilizada (tiempo real, post-proceso, etc.) y las condiciones de utilización (por
ejemplo estático, baja velocidad, etc.) se pueden obtener exactitudes hasta el orden de los centímetros.
4.9.7.
ERROR DE MULTITRAYECTORIA. (MULTIPATH).
Los efectos de la multitrayectoria de la señal GPS ocurren cuando la señal no solo es recibida
directamente desde el satélite sino desde las superficies cercanas a la antena del receptor debido a la reflexión de
la señal. La señal de multitrayectoria se superpone con la señal directa y produce errores de fase, los cuales traen
como consecuencia medidas erradas de las distancias a los satélites. Estos efectos tienen características periódicas
y pueden llegar a causar errores que alcancen amplitudes de algunos metros con las técnicas tradicionales de
medida del pseudorango. Con receptores especiales que usan técnicas diferentes (carrier phase) estos errores se
reducen a unos cuantos centímetros, también se puede evitar este efecto utilizando diseños de antenas apropiadas.
4.10.
GLONASS DIFERENCIAL
A finales de los años 70 comenzó en Rusia la investigación en el campo del sistema GLONASS
diferencial, lo que significa que esta investigación comenzó al tiempo que se desarrollaba el sistema GLONASS.
Pero, debido a diversas causas, la implementación del sistema GLONASS diferencial en Rusia no llegó a su fin.
La falta de disponibilidad selectiva en el GLONASS fue decisiva para que esto ocurriera, ya que la precisión
estándar del sistema resultaba suficiente para los usuarios rusos.
En 1990-91 los trabajos en este campo volvieron a revitalizarse debido a extensión del sistema DGPS
incluso en territorio ruso y a que ciertas compañías extranjeras mostraron gran interés en introducirse en el
mercado ruso de equipamiento.
Bajo estas circunstancias, el interés de los usuarios rusos y de los fabricantes de equipos diferenciales
aumentó considerablemente y los trabajos para la creación de estaciones diferenciales para diversas aplicaciones
se aceleraron.
Actualmente está en proyecto la creación de sistemas diferenciales de área local (LADS) y de área
regional (RADS) para el control del tráfico Aéreo y Marítimo, pero debido a la necesidad de canales específicos
para la transmisión de las correcciones diferenciales, su uso por parte de usuarios particulares es problemática.
En Rusia existe la tendencia a crear una red de sistemas diferenciales departamentales orientada a
usuarios específicos. Estos sistemas son los LADS pero sus zonas operativas no cubren la totalidad del territorio
ruso. Una posible solución sería incrementar el número de LADS para dar servicio a la totalidad del territorio,
pero resulta demasiado costoso. Por este motivo, existen propuestas para emplear otro tipo de sistemas
diferenciales.
Para poder alcanzar los requerimientos necesarios, surge el concepto UDS (United Differential System), a
fin de que el desarrollo de los WADS (Wide Área Differential System) y LADS en Rusia no se hagan
aisladamente unos de otros. El UDS determina que el sistema diferencial ruso debe tener una estructura con tres
- 68 -
niveles que incluyen a los sistemas WADS, RADS y LADS. Cada nivel del UDS es el sistema autónomo llevando
a cabo sus tareas.
El primer nivel del UDS es el WADS y mediante las estaciones diferenciales de este 1er nivel se pueden
realizar las siguientes tareas:
•
Recoger y procesar los datos recibidos de las estaciones de monitorización, las estaciones
diferenciales del 2do y 3er nivel, para corregir los parámetros del modelo regional de la ionosfera,
efemérides, correcciones del reloj y datos de integridad.
•
Transmitir la información del WADS necesaria a las estaciones diferenciales del 2do y 3er nivel o
directamente a los usuarios.
•
Interacción entre el WADS y el Centro de Control GLONASS.
El número necesario de estaciones de 1er nivel está entre 3 y 5, y la precisión lograda en un área de radio
entre 1500 y 2000 Km. es de entre 5 y 10 metros. Para la red de estaciones diferenciales de 1er nivel es posible la
utilización de la infraestructura del Complejo Ruso de Control de Vehículos Espaciales.
El segundo nivel del UDS es el RADS, que será creado para cubrir regiones desarrolladas con un buen
número de usuarios y con cierta capacidad económica. Las estaciones RADS pueden ser situadas en zonas con
tráfico intenso (Aéreo, Terrestre o Marítimo), zonas con condiciones meteorológicas adversas etc. La precisión
obtenida es de entre 3 y 10 m en un área de radio 500 Km.
El tercer nivel es el LADS, que será desarrollado en regiones específicas para proporcionar aplicaciones
económicas, científicas o de defensa. También se podrá, entre otras cosas, realizar trabajos departamentales
especiales como el postprocesado de datos. Las estaciones LADS permitirán una precisión de decímetros en un
área en torno a varias decenas de Km. El LADS puede ser creado en versión móvil. El 3er nivel incluye también
los pseudolitos. Se esperaba que el desarrollo de las RADS y LADS se llevará a cabo entre 1996 y 1997, y
después serían integradas en el UDS entre 1998 y el 2000. Sin embargo desde que la constelación GLONASS fue
completada en 1996 solo durante 40 días estuvieron disponibles los 24 satélites que la integran.
Además el sistema acusa serios problemas con la calidad de las señales transmitidas, se han observado
errores de medida de varios kilómetros.
Considerando los problemas económicos de la Federación Rusa, cabe la posibilidad de que la
constelación no se mantenga y deje de estar operativa en un futuro no muy lejano, aunque lo más probable es que
a imagen de la estación espacial MIR, se mantenga aún por un tiempo operativa pero sin poder prestar el máximo
de sus prestaciones.
- 69 -
CAPITULO 5
FUTUROS SISTEMAS DE POSICIONAMIETO GLOBAL
5.1. GALILEO
Galileo es la respuesta europea al nuevo panorama internacional de GNSS,
constituye el primero de los llamados GNSS-2, y se espera que genere multitud de
beneficios económicos y puestos de trabajo en la Unión Europea.
Galileo se ha planteado como un sistema que permita ser independiente a
Europa del GPS y el GLONASS, pero que sea complementario a ambos y que
permita la interoperabilidad con éstos. Cuando el proyecto esté completado se
dispondrá de 30 nuevos satélites que conjuntamente con GPS y GLONASS
permitirá obtener un posicionamiento muy preciso33.
El escenario de Galileo es particularmente interesante porque implica a diferentes países que han buscado
la forma de actuar conjuntamente para desarrollar el nuevo sistema. Con el acuerdo del 30 de noviembre de 2007
se alcanzó un consenso entre los 27 países de la Unión Europea. Ellos son:
Figura 5.1: Miembros de la Unión Europea
5.1.1.
HISTORIA
El programa Galileo es una iniciativa de la Unión Europea (UE) conjuntamente con la Agencia Espacial
Europea (ESA), cuando en los años 80´ lanzaron el proyecto NAVSAT, en la que han participado multitud de
empresas de distintos países de la UE a los que se ha realizado concesiones para distintas partes del proyecto.
La Unión Europea creó una organización que se hiciera cargo del proyecto y sus aspectos legislativos, la
GJU (Galileo Joint Undertaking). Esta organización se hizo cargo de la definición y desarrollo del sistema hasta
33
ec.europa.eu/enterprise
esa.int
- 70 -
el 1 de enero de 2007 momento en que otro organismo, la GNSS Supervisor Authority, tomó el relevo de la
primera, y que velará por el cumplimiento de los objetivos del programa hasta que Galileo esté plenamente
operativo, y a partir de entonces, por la explotación del sistema en la fase operativa.
El proyecto Galileo se desarrolla actualmente en tres fases definidas por la Dirección General de Energía
y Transportes de la Comisión Europea. Estas fases que aquí se presentan fueron definidas al inicio del proyecto,
pero han sufrido modificaciones ya que el desarrollo del sistema se ha ido retrasando por el desacuerdo entre los
países miembros de la Unión Europea y la falta de fondos de financiación del proyecto. En la actualidad se espera
que Galileo esté operativo para 2015 con un total de 18 satélites. Y completar su total capacidad operativa de 30
satélites para el año 2020.
5.1.2.
DESARROLLO DEL SISTEMA
5.1.2.1.
DEFINICIÓN DEL SISTEMA (1999-2002)
Esta fase, la Comisión Europea y la Agencia Espacial Europea movilizaron gran parte de la industria
europea para las distintas partes del programa, formándose alianzas a nivel nacional e internacional para participar
en el proyecto Galileo. Entre los estudios y proyectos llevados a cabo por las distintas compañías, cabe destacar:
•
GALA: encargado de suministrar los requisitos de la misión, diseñar la arquitectura global de
Galileo, estudiar su conexión con otros sistemas y definir los elementos no espaciales necesarios.
•
GEMINUS: estudio para la definición de servicios de Galileo en función de las necesidades de los
usuarios.
•
INTEG: estudio para integrar el sistema de aumento EGNOS en el proyecto Galileo.
•
SAGA: proyecto para la estandarización de Galileo.
•
GalileoSat: estudio sobre el segmento espacial del sistema.
Como resultado de la fase de definición, la Comisión Europea en conjunto con la ESA editaron el
Documento de Definición de Galileo en el que se resumen los hitos que se han alcanzado en esta fase del
proyecto.
5.1.2.2.
DESARROLLO DEL SISTEMA (2002-2013)
Para la fase de desarrollo del sistema, la EC y la ESA decidieron crear la GJU, como responsable de dicha
fase. Dicha organización supervisó el trabajo de distintas empresas con el fin de desarrollar el sistema, tanto los
segmentos espacial como de tierra, y validar el funcionamiento del mismo hasta 2007, luego paso a manos de la
GNSS Supervisor Authority.
En concreto para el desarrollo de sistema, que se van a llevar a cabo diversas tareas en la actualidad, que
son:
•
GNSS Supervisor Authority: La GSA se encargará de establecer y supervisar las PPP (Public
Private Partnerships), entre el sector público y privado con el fin de financiar el proyecto Galileo.
•
Galileo in Orbit Validation: GNSS Supervisor Authority se encargará junto con la ESA de
supervisar el funcionamiento de los primeros satélites que se lancen al espacio (GIOVE) que
demuestren la capacidad operativa del sistema. El primer satélite puesto en órbita fue supervisado
por la GJU en 2005.
•
6FP Galileo Related Activities: GJU proveerá de una gestión técnica de proyectos que serán la
base del funcionamiento de Galileo.
•
Integración con EGNOS: GJU se encargará de gestionar la integración del nuevo sistema con el
SBAS EGNOS ya desarrollado.
La fase de desarrollo lleva un retraso de tres años con respecto a la planificación original, por los motivos
comentados anteriormente.
- 71 -
5.1.2.3. FUNCIONAMIENTO Y EXPLOTACIÓN COMERCIAL DEL MISMO (2013-EN
ADELANTE)
La explotación del sistema se llevará a cabo por la GNSS Supervisor Authority descrita anteriormente.
Dicho organismo se encargará de la explotación comercial del sistema, permitiendo obtener unos mayores
beneficios económicos por el desarrollo de aplicaciones comerciales, una gestión efectiva y la obtención de
fondos para la financiación del proyecto.
En la actualidad Galileo Industries SA es uno de los principales consorcios formados por distintas
empresas, que se encarga de dicha fase. Está compuesta por Alcatel Space, Alenia Spazio, Astrium GMBH,
Atrium Ltd y la española GSS, que agrupa distintas empresas (Hispasat, GMV, Alcatel Espacio, Sener, EADSCASA, Indra, AENA).
5.1.3.
COMPOSICIÓN DEL SISTEMA
Galileo se compone de tres segmentos al igual que el GPS y GLONASS. Aunque todavía no están
completos, vamos a describir los hitos alcanzados y la planificación de cada uno.
Figura 5.2: Composición del Sistema GALILEO
Los componentes planificados por la ESA para el proyecto Galileo. Estos son:
•
Componentes Globales: son el núcleo del sistema Galileo, consiste en los satélites (tanto de
navegación como de comunicación), centros de misión y de control.
•
Componentes regionales: comprenderá los conocidos como External Región Integrity Systems
(ERIS), situados fuera de la Unión Europea, implementados y operados por organizaciones de
países o grupos de países, que se encargarán de monitorizar la integridad de los servicios de
Galileo.
•
Componentes locales: desarrollados para mejorar las prestaciones de Galileo en aquellas zonas
donde la señal no puede ser recibida. Serán desarrolladas por proveedores de servicios.
•
Segmento usuario: recibe las señales de los satélites para distintas aplicaciones.
5.1.3.1. SEGMENTO ESPACIAL
El segmento planificado de Galileo constará de 30 satélites en orbita terrestre media (MEO), distribuidos
en tres planos de los cuales 10 satélites ocuparan cada uno de los planos, quedando 1 satélite por cada plano de
repuesto. Estarán situados a una altura de 23.222 Km., con una inclinación de 56º sobre el ecuador, tardando 14
horas en completar una órbita a la Tierra, de tal forma que cada 24 horas se repita la constelación, que posee
además simetría esférica.
- 72 -
Dicho segmento además será interoperable con el GPS Americano y el GLONASS Ruso, y podrán verse
al menos 4 satélites en cualquier parte del planeta con un 90% de probabilidad, si bien en la mayor parte de las
zonas del planeta entre 6 y 8 satélites serán visibles. 34
Figura 5.3: Constelación GALILEO
5.1.3.1.1.
ACTUALIDAD DEL SISTEMA
Los dos primeros satélites europeos de navegación, GIOVE-A y B, fueron lanzados en los años 2005 y
2008, respectivamente, con el objetivo de reservar las frecuencias asignadas por la Unión Internacional de
Telecomunicaciones (UIT) y de probar en órbita la tecnología desarrollada para la nueva constelación.
Figura 5.4: Lanzamiento de satélite Galileo-IOV PFM y Galileo-IOV FM2
El siguiente paso consistió en el lanzamiento de los dos de los cuatro primeros satélites operacionales
(Galileo-IOV PFM y Galileo-IOV FM2) el día 21 de Octubre de 2011 a las 10:30 hs UTC, lanzados por un
34 35
esa.int/esaNA/galileo
- 73 -
cohete Soyuz ST-B desde la base de Kourou en la Guayana Francesa, construidos por EADS Astrium, teniendo
un peso de 640 kg cada uno.
Para el 2012 se planea poner en orbita los restantes dos satélites, con los que se validará el diseño de
Galileo tanto en el espacio como en la Tierra. Tan pronto como se haya completado esta fase de Validación en
Órbita (IOV), se lanzarán los satélites necesarios para alcanzar la Capacidad Inicial de Operaciones (IOC) a fines
de esta década.35
5.1.3.1.2.
SATÉLITES GALILEO
5.1.3.1.2.1. SATÉLITE GIOVE-A (Galileo In Orbit Validation Element)
Fue el primer satélite que fue lanzado al espacio, desarrollado por la ESA, sirvió para comprobar las
tecnologías críticas desarrolladas por la ESA. El lanzamiento se produjo el 28 de Diciembre de 2005. El satélite
comenzó a transmitir señales de forma exitosa el 12 de Enero de 2006. Estas señales sirvieron para:
•
Verificar las tecnologías desarrolladas: incluyendo el reloj atómico de Rubidio, el generador de
señales de navegación.
•
Caracterización de las señales enviadas: incluyendo la verificación de los receptores de usuario y
su resistencia a la recepción multipath, en un entorno real.
•
Caracterización de la radiación de la órbita terrestre media: ya que ésta podría añadir campos
electromagnéticos que condicionaran el diseño del sistema.
5.1.3.1.2.2. SATÉLITE GIOVE-B
Un nuevo satélite de prueba fue lanzado a una Órbita Terrestre Media a bordo de un cohete Soyuz desde
el cosmódromo de Baikonur, en Kazajstán, el 27 de abril de 2008. Tras completar una exhaustiva campaña de
pruebas en órbita, el satélite fue declarado plenamente operativo en julio de 2008. 36
5.1.3.1.2.3. SATÉLITE GIOVE-A2
Se planeo lanzarlo a partir de 2008 en reemplazo del GIOVE-B en caso de que este no cumpliera con los
plazos, cabe aclarar que el costo del GIOVE-A2 supera los 25 millones de Euros. 37
La ESA lanzará los primeros cuatro satélites operativos con dos lanzamientos distintos. Los dos primeros
satélites se colocan en un primer plano orbital y la segunda en un segundo plano orbital. Estos cuatro satélites,
además del segmento de tierra se utilizarán para validar el sistema Galileo en su conjunto, junto con simuladores
de avanzada del sistema.
Entonces, los próximos dos satélites se lanzarán en un tercer plano orbital. Que será seguido por varios
lanzamientos con cohetes Ariane-5 o Soyuz desde el Puerto en la Guayana Francesa. Los primeros servicios se
entregarán cuando la constelación ha llegado a su configuración inicial del orbital.
Cuando los 30 satélites en el espacio en sus tres planos orbitales, esto es que Galileo esté plenamente
operativo, la prestación de sus servicios será a una amplia variedad de usuarios en todo el mundo.
Debido a los continuos retrasos, no se sabe con exactitud cuando estará el sistema plenamente operativo,
situándose la fecha de capacidad operativa inicial entre 2014 y 2015.
5.1.3.1.3.
ESTUDIO TÉCNICO DEL SEGMENTO ESPACIAL
Los satélites Galileo desarrollados en la actualidad, conocidos como GIOVE, se han desarrollado para
implementar el interfaz y validar el funcionamiento del sistema.
36
37
astrium.eads.net
terra.com.pr
- 74 -
Cada satélite retransmite las señales de navegación correspondientes a cada banda de frecuencias. Como
ya se ha visto dichas señales se componen de un código PRN propio de cada satélite y pueden llevar datos o la
portadora. Emplean CDMA como método de acceso al medio y modulan la señal a la frecuencia correspondiente
resultando una señal de navegación en espectro expandido.
El funcionamiento del satélite depende de cuatro relojes que determinan la frecuencia a la que funciona el
sistema. Hay dos de cada tipo:
•
Passive Hydrogen Maser Clock (PHM): es el reloj principal del sistema dotado de gran precisión.
•
Rubidium Atomic Frequency Standard (RAFS): reloj secundario que entra en funcionamiento en
caso de fallo del primero.
Los elementos de los que se componen los satélites Galileo necesarios para la transmisión de la señal de
navegación y la recepción de señales de tierra son los siguientes:
•
Clock Monitoring and Control Unit (CMCU): actúa como interfaz entre los relojes del sistema y la
NSGU y se asegura de que el reloj maestro del satélite esté coordinado con los de reserva.
•
Navigation Signal Generation Unit (NGSU): se encarga de generar los mensajes y códigos de
navegación, así como las señales de cada una de las bandas, usando el tipo de modulación
correspondiente a cada banda y el CDMA.
•
Frequency Generation and Modulation Unit (FGMU): modula la señal resultante del NSGU a la
frecuencia de transmisión, formando así la señal de navegación.
•
Telemetry, Tracking and Command (TT&C) Transponder: demodula tanto para una señal de
espectro expandido como para una normal las señales procedentes del segmento de control, y se
encarga de la telemetría del satélite.
•
Solid-State Power Amplifier (SSPA): se encarga de amplificar cada señal manteniendo los
requisitos de linealidad para optimizar la transmisión.
•
Output Multiplexer (OMUX): combina las señales que salen de SSPA con bajas pérdidas y alta
estabilidad para el retardo de grupo.
5.1.3.2. SEGMENTO CONTROL
Como se ha explicado antes el sistema Galileo cuenta con una serie de elementos que poseen distintas
funciones, elementos globales, regionales y locales explicados anteriormente.
5.1.3.2.1.
COMPONENTE GLOBAL
En cuanto al segmento de control el componente global de Galileo comprende dos estaciones maestras
GCC que llevan a cabo funciones de control y de misión con dos segmentos dedicados en exclusiva a cada una de
estas funciones:
•
Ground Control Segment (GCS): red de cinco estaciones TT&C distribuidas por todo el mundo
que prestarán el servicio necesario a los GCC para que puedan llevar a cabo sus funciones de
control. Los dos GCC son los encargados de administrar los satélites y su mantenimiento en órbita.
Se comunicarán con cada satélite de manera regular y programada, para ello cada estación cuenta
con una antena de 13 metros capaz de operar en la banda de 2 GHz. Son el equivalente a la MCS
de GPS.
•
Galileo Mission Segment (GMS): formada por una red global de 30 estaciones, Galileo Sensor
Stations (GSS), encargadas de monitorizar las señales emitidas por los satélites. Las GSS se
encargarán de dos funciones; determinar la órbita y sincronización temporal de los satélites
(OD&TS), y monitorizar la integridad de la señal emitida por los satélites, retransmitiendo dicha
información a satélites multidifusión que enviarán la información de integridad de la señal al
segmento usuario.
- 75 -
La información de los mensajes de navegación e integridad se enviará a las instalaciones GMS que poseen
los GCC, donde se procesará dicha información y se enviará a los satélites de Galileo a través de los Mission
Uplink Stations instalados en cinco puntos, a través de antenas de 3 metros en la banda de 5 GHz.
5.1.4.
SERVICIOS GALILEO
Como primer Sistema de Navegación de nueva generación, Galileo ha sido diseñado para ofrecer una
mayor cantidad de servicios que aquellos que fueron definidos para GPS y GLONASS. Galileo va a soportar los
siguientes servicios de usuario, basados en distintas señales de navegación, descritas más adelante:
•
Open Service (OS): el Servicio Abierto estará cubierto mediante dos señales de navegación de
diferente frecuencia. El Servicio Abierto será gratuito para todos los usuarios provistos de un
receptor Galileo. Este servicio está pensado para aplicaciones de uso masivo como por ejemplo:
navegación automovilística e hibridación con teléfonos móviles.
•
Comercial Service (CS): el Servicio Comercial es un servicio de pago que proporcionará
información de posición y tiempo para productos profesionales y comerciales de valor añadido.
•
Public Regulated Service (PRS): El Servicio Público Regulado, la naturaleza de las señales PRS,
implican un servicio robusto y resistente a las interferencias o cualquier otra agresión accidental o
deliberada. La información PRS será cifrada. Aunque las aplicaciones y los usuarios no están
todavía definidos pueden establecerse los siguientes grupos:
o
Aplicaciones públicas dedicadas a la seguridad, como policía, protección civil,
aplicaciones judiciales (control o seguimiento de personas, etc.).
o
Aplicaciones en sectores críticos como energía, transporte y comunicaciones.
o
Actividades económicas o industriales consideradas de interés estratégico para Europa.
o
Aplicaciones militares.
•
Safety of Live Service (SoL): Los Servicios relacionados con la seguridad para la vida
proporcionan una señal de integridad, que puede estar cifrada, ligada a un tiempo límite de alarma,
como ejemplo típico puede considerarse la aviación comercial. Este servicio permitirá aterrizaje de
precisión CAT- I. La combinación de Galileo con GPS podría hacer que pudieran ser utilizados
conjuntamente como medio único de navegación.
•
Servicio búsqueda y, auxilio y rescate (SAR), este será un servicio en beneficio público general
accesible a todos los ciudadanos del mundo que se encuentren en una situación comprometida. Los
datos SAR utilizados para confirmación de recepción del mensaje de petición de ayuda y
coordinación de los equipos de rescate, estarán embebidos en los datos del Servicio Libre (OS) y
emitidos en la banda L1.
Las prestaciones de cada servicio son distintas, y dependerá del tipo de señal y de los sistemas de aumento
a nivel local. Además de las diferencias de precisión, la diferencia más notable entre los distintos tipos de señales
serán los radioenlaces que emplee cada una (serán transmitidas en distintas bandas de frecuencia), y la
codificación de las mismas. Los servicios de pago serán encriptadas con un algoritmo comercial, que será
desencriptado mediante un receptor especial que posea los códigos necesarios.
Dado que actualmente GPS es el sistema Global de Navegación por Satélite completamente operativo,
seria con el que se expondrían los principios básicos que rigen la navegación mediante satélite. Este trabajo de
investigación será desarrollado en torno a este sistema, pero sus conclusiones (tanto las relativas al efecto
ionosférico en las diversas aplicaciones de la navegación mediante receptores de una única frecuencia, como las
técnicas desarrolladas para atenuarlo) son extrapolables a un sistema Global de Navegación por Satélite genérico.
5.1.5.
DEFINICIÓN DEL INTERFAZ
El interfaz de Galileo define cuatro radioenlaces a través de los cuales establece sus servicios. Dichos
enlaces se conocen como E1-L1, E5 (que se divide en E5a y E5b) y E6. Cada enlace está dividido en sub-bandas
(E5a, E5b, E6-A, E6-B, E6-C, E1-A, E1- B, E1-C). Por cada sub-banda del enlace se transmiten una o más
- 76 -
señales que prestan los distintos servicios. El interfaz de Galileo se muestra en la siguiente tabla donde se puede
observar el mapeo entre servicios y canales por los que se transmiten, así como una breve descripción de las
bandas de frecuencias y la estructura de cada señal.
Tabla 5.1: Características de la señal GALILEO
Para cada sub-banda del enlace se definen dos canales, uno de datos y otro de portadora que conforman la
señal transmitida. El canal de datos es el resultado de la modulación del código PRN, una subportadora si está
presente, y una cadena de datos de navegación. El canal de portadora está formado por el código PRN y la
subportadora. Al igual que GPS, los satélites Galileo transmitirán sobre las mismas frecuencias en espectro
ensanchado. Galileo empleará la técnica CDMA para distinguir la información de cada satélite. Las señales en
espectro expandido serán transmitidas incluyendo códigos PRN diferentes para distintas señales y satélites.
5.1.6.
ESTRUCTURA DE LA SEÑAL DE NAVEGACIÓN
Figura 5.5: Señal de Navegación GALILEO
El sistema Galileo transmite seis señales que conforman los distintos enlaces por los que prestará sus
servicios. Cada señal tiene unas determinadas características en cuanto a su estructura, a la modulación empleada
y la tasa de datos. En la Figura se muestra el espectro de cada una de las señales que se van a transmitir y la banda
en que se ubican.
Las señales que transmite cada satélite son:
- 77 -
•
Señal E1: es una señal de acceso abierto que comprende un canal dedicado a datos y otro a la
portadora (L1-B y L1-C respectivamente). Se compone de códigos PRN y un mensaje de
navegación (I/Nav) no encriptados a los que pueden acceder todos los usuarios. Contiene mensajes
de integridad no encriptados, así como datos comerciales encriptados. Su tasa de datos es de 125
bps. La señal E1ofrece los servicios OS, CS y SoL.
•
Señal LP1: es una señal de acceso restringido que se transmite por el canal L1- A. Tanto los
códigos PRN como el mensaje de navegación, que se conoce como G/Nav están encriptados y
prestan servicios gubernamentales.
•
Señal E6: es una señal de tipo comercial que posee dos canales, uno de datos y otro de portadora
(E6-B, E6-C). Sus códigos de posicionamiento y el mensaje de navegación están encriptados
mediante un algoritmo comercial. Su mensaje de navegación es el C/Nav. Su tasa de datos es de
500 bps. Se usa para CS.
•
Señal E6P: es una señal de acceso restringido que se transmite por el canal E6- A. Sus códigos
PRN y el mensaje de navegación están encriptados mediante un algoritmo gubernamental. El
mensaje de navegación es del tipo G/Nav.
•
Señal E5a: es la señal de servicio abierto que se ofrece por la banda E5 e incluye los canales de
información y portadora (E5b-I y E5b-Q). Sus códigos de posicionamiento y su mensaje de
navegación (F/Nav) no están encriptados. Provee de información básica de apoyo a la función de
navegación y función de tiempo. Se usa para OS y su tasa es de 25 bps.
•
Señal E5b: es una señal de acceso abierto que comprende un canal dedicado a datos y otro a la
portadora (E5b-I y E5b-Q respectivamente). Se compone de códigos PRN no encriptados y un
mensaje (I/Nav) de navegación a los que pueden acceder todos los usuarios. Contiene mensajes de
integridad no encriptado y datos comerciales encriptados. Ofrece CS, OS y servicio SoL.
Cada enlace emplea un tipo de modulación distinta. En función del tipo de modulación la tasa de chips
variará:
•
Las bandas E5a y E5b se procesan como un solo ancho de banda. Las señales de E5 se transmiten
usando la técnica AltBOC (15,10) con tasa de chips 10*f0=10.23 Mcps.
•
Para E6 se utiliza la técnica BPSK con una tasa de chips de 5*f0=5.115 Mcps.
•
Para E1 la técnica BOC con tasa f0=1.023 Mcps.
5.2. BEIDOU (COMPASS)
Es un proyecto desarrollado por la República Popular de China para
obtener un sistema de navegación por satélite. "BEIDOU" es el nombre chino
para la constelación de la Osa Mayor.
Este sistema actualmente consta de dos fases, una la llamada fase
BeiDou-1 (compuesta por 4 satélites) la cual es puramente experimental y tiene
una cobertura limitada, esta fase esta alojada en una Orbita Geoestacionaria.
La fase dos, llamada BeiDou-2, es la que se encargará de brindar un servicio a
nivel mundial, la misma contará con 30 satélites en una Orbita Terrestre
Media, y 5 satélites en una Orbita Geoestacionaria (figura 5.6). Se prevé que
cuente con 12 a 14 satélites entre 2011 y 2015. Para 2020, ya plenamente operativo deberá contar con sus 30
satélites. A principio de 2007 se pusieron 2 satélites en marcha, de momento (Abril 2012), ya tienen 10 satélites
experimentales en órbita.
Según informaciones oficiales ofrecerá dos tipos de servicios: el primero será abierto y podrá dar una
posición con un margen de 10 metros de distancia, 0,2 metros por segundo de velocidad y 0,000005 segundos de
tiempo. El segundo servicio será autorizado solo para determinados clientes y ofrecerá servicios más precisos y
con mayores medidas de seguridad. Estos servicios se centran en ocho frecuencias portadoras diferentes.
- 78 -
Al igual que sus antecesores, también cuenta con una estructura de trabajo similar, esta compuesto de tres
segmentos:
•
Segmento Espacial
•
Segmento Control
•
Segmento Usuario
El segmento de control cuenta con una Estación Principal y una serie de Estaciones de seguimiento y
Estaciones de Monitoreo.
El segmento usuario consiste en una terminal de usuarios BeiDou y una terminal que sea compatible con
los distintos sistemas de navegación por satélites.38
A diferencia de los sistemas GPS, GLONASS, y GALILEO, que utilizan satélites en órbitas bajas y
ofrecen servicio global, BeiDou al usa satélites en Orbita Geoestacionaria implica que el sistema no requiera una
gran constelación de satélites, pero limita su cobertura sobre la tierra a los satélites que son visibles.
China está también asociada con el proyecto Galileo, el cual no es todavía operacional. 39
Figura 5.6: Constelación COMPASS
5.3. IRNSS
El Sistema Regional Indio de navegación por satélite (IRNSS) es una propuesta de autonomía
regional del sistema de navegación por satélite para ser construido y controlado por el gobierno de la India .Su
objetivo es proporcionar una precisión de la posición absoluta de mejor que 20 metros a lo largo de la India y
dentro de una región que se extiende aproximadamente entre 1.500 y 2.000 kilómetros en torno a ella. Uno de los
objetivos de control de la India completa se ha dicho, con el segmento espacial, segmento terreno y receptores de
los usuarios están construyendo en la India. El Gobierno aprobó el proyecto en mayo de 2006, con la intención de
ser implementado dentro de los seis a siete años.
38
39
beidou.gov.cn
globalsecurity.org - beidou.gov.cn
- 79 -
Figura 5.7: Sistema regional IRNSS
5.3.1.
DETALLES TÉCNICOS
El sistema propuesto consiste en una constelación de siete satélites y un segmento de apoyo en tierra. Tres
de los satélites de la constelación se colocará en órbita geoestacionaria y las cuatro restantes en la órbita
geoestacionaria inclinada de 29º respecto al plano ecuatorial. Un arreglo de este medio a los siete satélites de radio
tiene una visibilidad continua con las estaciones de control de la India. Las cargas útiles de satélites que consisten
en los relojes atómicos y otros equipos electrónicos para generar las señales de navegación. Las señales de
navegación se transmite en la banda S de frecuencia (4,2 GHz) y de difusión a través de una antena de arreglo de
fase para mantener la cobertura necesaria y la fuerza de la señal. Los satélites pesan aproximadamente 1.330 Kg.
y sus paneles solares generan 1.400 vatios de energía.
El segmento de tierra de la constelación IRNSS consistiría en un centro de control principal (MCC), las
estaciones terrestres para el seguimiento y estimación de las órbitas de los satélites y garantizar la integridad de la
red (IRIM), y las estaciones de tierra adicionales para controlar la salud de los satélites con la capacidad de dar
órdenes a los satélites de radio (estaciones TT & C). El MCC podría estimar y predecir la posición de todos los
satélites IRNSS, calcular la integridad, hace necesario correcciones ionosféricas y el reloj y ejecutar el software de
navegación. En la búsqueda de un sistema altamente independiente, una infraestructura de la India el tiempo
estándar también se establecería. 40
5.4. QZSS
El Sistema Quasi-Zenith Satelital (QZSS) es el sistema de posicionamiento perteneciente a Japón, utiliza
satélites múltiples que tienen el mismo periodo orbital que los satélites geoestacionarios con algunas inclinaciones
orbitales (sus órbitas son conocidas como "Quasi-Zenith órbitas"). Estos satélites se encuentran en varios planos
orbitales, de modo que un satélite siempre aparece cerca del cenit sobre la región de Japón.
El sistema hace posible ofrecer por satélite de alta precisión de posicionamiento de servicios que abarcan
casi el 100% de Japón, incluyendo cañón urbano y el terreno montañoso.
A través del desarrollo y la implementación de este sistema, el objetivo es mejorar la tecnología de
posicionamiento por satélite de Japón y contribuir a la construcción de una sociedad segura y protegida con una
mejora de posicionamiento por satélite basada en la navegación, y las tecnologías de momento.
40
nationmaster.com
- 80 -
Figura 5.8: Sistema Satelital QZSS
5.4.1.
SERVICIOS DEL QZSS
QZSS mejora los servicios GPS de las siguientes maneras:
•
Mejora la disponibilidad (la mejora de la disponibilidad de las señales GPS)
a. QZSS mejora la disponibilidad de GPS autónomo para cualquier usuario que tenga visibilidad, y
pueden realizar un seguimiento, uno o más satélites QZSS. Esta mejora será mayor para los
usuarios en la región de Japón ya que el diseño está optimizado para la constelación de la zona.
Sin embargo, los usuarios en muchas otras áreas de Asia-Pacífico también se beneficiarán de la
disposición geométrica mayor posible gracias a QZSS. Esto aumenta el área y horas en que el
posicionamiento es posible tanto en ubicaciones urbanas y montañosas. El sistema también
mejora la precisión de posicionamiento de la transmisión de señales (L1C / A, L1C, L2C y L5),
que son equivalentes a las señales del GPS modernizado.
b. Debido a que las señales GPS mejora la disponibilidad de transmisión de los satélites QZSS son
compatibles con las señales del GPS modernizado y se garantiza la interoperabilidad, el sistema
utiliza señales GPS modernizado como base, la transmisión de la L1C / A la señal, la señal L1C,
señal L2C y la señal L5.Este cambio reduce al mínimo con las especificaciones y diseños de
receptores
•
La mejora del rendimiento (aumento de la exactitud y fiabilidad de las señales GPS).
a. QZSS mejora aún más la precisión del GPS autónomo a través de la corrección de datos que van
siempre a través de la transmisión de las señales de la clase sub-métrica, la mejora del
rendimiento L1-SAIF y LEX. QZSS también mejora la fiabilidad por medio de análisis de fallos
y notificaciones del sistema de salud de datos. QZSS también ofrece otros datos de apoyo a los
usuarios para mejorar la adquisición de los satélites GPS.
- 81 -
CAPITULO 6
GEODESIA SATELITAL
6.1. INTRODUCCIÓN:
Fue en 1880 cuando Friedrich Robert Helmert (31 julio 1843-15 junio 1917),
definió a la geodesia como: es la ciencia encargada de la medición y representación
cartográfica de la superficie terrestre. Esta definición involucra no solamente la
determinación de la forma y dimensiones de la Tierra sino también la determinación del
campo de gravedad terrestre. El concepto de geodesia fue posteriormente extendido y
actualmente su estudio incluye la medición de los fondos oceánicos estando además ligada a
la exploración espacial lo que permite estudiar, en el sentido geodésico, otros cuerpos celestes
(por ejemplo: la Luna). Constituye también un tema importante de la geodesia moderna, el
estudio de las variaciones temporales, tanto de las coordenadas de los puntos fijos como del campo de gravedad.
En algunos aspectos (geométricos), se puede pensar a la geodesia como una continuación de la topografía.
Desde ese punto de vista ambas tienen como objetivo común la determinación de las:
•
•
•
Formas
Dimensiones
Ubicación
de una parte de la superficie terrestre.
Mientras la topografía se ocupa de pequeñas extensiones (lo que permite el uso de métodos de medición
y cálculo simplificados), la geodesia tiene como meta grandes extensiones (región, provincia, países o incluso
todo el planeta).
6.2.
RESEÑA HISTÓRICA
Desde tiempos muy remotos el hombre se ha planteado interrogantes tales como
¿Cuál es la forma de la Tierra?
¿Cuáles son sus dimensiones? Estas preguntas dieron origen a la Geodesia.
Eratóstenes (Alejandría, 276 - 194 AC), director de la biblioteca del Museo de
Alejandría, realizó la primera medición de la circunferencia de la Tierra usando una técnica
extremadamente simple. La experiencia consistió en lo siguiente: en el momento en que el
Sol estaba directamente sobre Siena (hoy Asuán) de modo tal que el fondo de un pozo fuera
totalmente iluminado por los rayos solares, en Alejandría se efectuó la medición de la
sombra proyectada por un monumento llamado gnomon de altura conocida (Figura 3.1).
Así dedujo que en Alejandría el Sol estaba a 1/50 de círculo debajo del Cenit
mientras en Siena estaba en la vertical. Así calculó la circunferencia de la Tierra multiplicando la distancia entre
Alejandría y Siena por cincuenta. La distancia fue estimada a partir del tiempo que demandó el viaje entre ambas
poblaciones el cual la realizo de un modo muy usado para la época, Eratóstenes contrato a contadores de pasos,
personas que se ganaban la vida midiendo distancias caminando entre dos puntos dados con una longitud de paso
muy regular y contando el número de estos pasos.
- 82 -
Figura 6.1: Calculo de la circunferencia de la Tierra según Eratóstenes
De acuerdo a los archivos de la época, la distancia entre Alexandría y Syene era de 5000 estadios, donde
un estadio equivalía a 157,50 m, por lo que la circunferencia terrestre debería ser 250.000 estadios. Gracias a esto,
Eratóstenes estimó que la circunferencia de la Tierra era de 39.375 km (es decir, un radio de 6.267 km). Dado que
el radio medio de la Tierra aceptado hoy en día es de unos 6.371 km (40.030 km de circunferencia), el error
cometido estaba alrededor del 2%, una hazaña formidable para la época y los medios con que se contaba.
No obstante actualmente se cree que los resultados obtenidos fueron afortunados, ya que existieron
elementos de juicio equivocados en esa determinación, a pesar de lo cual esa medición del tamaño de la Tierra fue
un importante progreso para la época.
Durante los próximos siglos, incluida la Edad Media completa, los estudios sobre la forma de la Tierra y
sus dimensiones fueron abandonados.
Una nueva época en el estudio de la forma y dimensiones de la Tierra (siglo XVII) comenzó después que
la ley de gravitación universal fuera enunciada por Newton.
Partiendo de la suposición de que nuestro planeta en otros tiempos estuvo en un estado de líquido
incandescente, Newton postuló que la Tierra debería tener una forma de esferoide aplastada en los Polos debido al
movimiento de rotación terrestre que genera una fuerza centrífuga normal al eje, que adquiere un valor máximo en
el Ecuador hasta anularse en los Polos.
Esta teoría se podía comprobar determinando la longitud de arcos de meridianos correspondiente a una
variación de latitud de un grado. Si la longitud de un arco de meridiano determinado, resultara mayor que otro
mas alejado del Ecuador, quedaría demostrado el achatamiento de la Tierra en los polos.
En esa época Snellius (Holanda) inicia una nueva etapa en la Geodesia al introducir el método de
triangulación en los trabajos geodésicos, superando así las dificultades que ofrecían las mediciones de distancias
sobre la superficie terrestre, produciendo además un considerable aumento en las precisiones.
Cassini (Francia) a partir de mediciones erróneas anuncia un esferoide alargado en los polos (Figura 3.2).
Se produce entonces una fuerte controversia entre ambos científicos.
En el siglo XVIII se resuelve la controversia a partir de dos expediciones geodésicas que dispone realizar
la Academia de Ciencias de París: una a Laponia cercana a la latitud 66º; otra al Perú cercana al Ecuador. Los
resultados de estas expediciones confirmaron la concepción de Newton.
- 83 -
Figura 6.2: Diferentes pensamientos de la forma de la Tierra
Durante los siguientes 200 años las determinaciones del radio y aplastamiento de la Tierra se convirtieron
en más precisas, a medida que las técnicas geodésicas se fueron refinando. En la primera mitad del siglo XX el
método utilizado para los levantamientos geodésicos fue fundamentalmente el de triangulación basada en la
trabajosa medición de una base con hilos de invar y en mediciones angulares. En la segunda mitad del siglo XX
irrumpieron los electrodistanciómetros, facilitando notablemente la medición de distancias con adecuada
precisión. Esto produjo una predilección por la trilateración (Figura 3.3).
Figura 6.3: Medición de distancia: Triangulación, Invar, Electrónica.
Sobre fines del siglo XX los Geodestas tienen acceso masivo al Sistema de Posicionamiento Global que
permite el posicionamiento preciso de puntos terrestres a partir de señales provenientes de satélites artificiales
diseñados, entre otros, para ese fin.
6.3.
ASPECTOS CONCEPTUALES BÁSICOS
Como ya se mencionó, la topografía y la geodesia (en su aspecto geométrico) se plantean como cuestión
fundamental la determinación de las formas, dimensiones y ubicación de un sector de la superficie terrestre.
Este sector puede corresponder a un área muy pequeña (algunas decenas de metros cuadrados) o a una
muy grande (con extensión continental o mundial).
- 84 -
Cuando se trata de definir la forma, dimensiones y ubicación de un objeto irregular, (es el caso de la
superficie de la Tierra) podemos pensar en reducir el problema a la determinación de la posición espacial de
puntos adecuadamente elegidos de ese objeto, a partir de los cuales podemos inferir un resultado. Es decir que la
discretización del problema planteado permite obtener una solución, que será tanto más precisa cuando mayor sea
la densidad y la calidad de los puntos seleccionados. Justamente en topografía y geodesia, el punto es la entidad
generadora de la superficie terrestre.
El problema tal cual está planteado queda entonces resuelto si determinamos las coordenadas espaciales
de los puntos mencionados (Figura 3.4). Las coordenadas pueden ser, por ejemplo, las cartesianas ortogonales x,
y, z o las polares ρ, λ, β correspondientes a una terna de ejes.
Figura 6.4: Coordenadas Cartesianas.
Es necesario entonces definir un sistema de coordenadas terrestres, ello implica establecer la ubicación
del origen del sistema y la orientación de por lo menos dos de los ejes, de tal manera que el sistema permanezca
fijo respecto de la Tierra. Se define así un sistema tri-rectangular de mano derecha con origen en el centro de
masas de la Tierra, con su eje Z apuntando al Polo Norte Convencional y su eje X pasando por la intersección del
plano del Ecuador y del meridiano de Greenwich.
Una vez concebido el sistema de referencia, se presenta un problema adicional: ¿Cómo utilizar en la
práctica el sistema previamente definido? La manera de hacerlo es a través de un conjunto de puntos fijos que
previamente se materializan en forma permanente sobre la superficie terrestre y cuyas coordenadas en dicho
sistema son conocidas. Estos puntos constituyen un marco de referencia geodésico. Entonces, el problema
práctico de posicionamiento se reducirá a la determinación de la ubicación relativa de puntos respecto del marco
de referencia mencionado.
6.4. SUPERFICIES DE REFERENCIA
6.4.1.
GEOIDE
La palabra geoide significa “forma de la Tierra” y fue introducida por Johann Benedict Listing en el año
1873. El geoide es un esferoide tridimensional que constituye una superficie equipotencial imaginaria que resulta
de suponer la superficie de los océanos en reposo y prolongada por debajo de los continentes y que sería la
superficie de equilibrio de las masas oceánicas sometidas a la acción gravitatoria y a la de la fuerza centrífuga
ocasionada por la rotación y traslación del planeta, de manera que la dirección de la gravedad es perpendicular en
todos los lugares.
Se define como superficie horizontal, o superficie de nivel o superficie equipotencial del campo de
gravedad, a aquella que en todos sus puntos es normal a la dirección de la vertical del lugar, la cual coincide con
la dirección de la gravedad en cada punto y es la dirección de la resultante de la fuerza de atracción de la masa
terrestre y la fuerza centrífuga producida por la rotación terrestre (Figura 6.5).
- 85 -
Figura 6.5: Fuerzas de la Gravedad.
La Tierra aparecerá entonces, laminada por superficies equipotenciales o de nivel de las cuales se destaca
una, la que mejor se ajusta al nivel medio del mar; es el GEOIDE.
Entonces definimos al Geoide como:
“Superficie equipotencial que es perpendicular en todos sus puntos a la dirección de la
gravedad resultante de la atracción terrestre y la fuerza centrífuga originada por la
rotación terrestre” 41
La gravedad terrestre varía con el tiempo, la altura, la latitud y longitud y por la desconocida irregular
distribución de masas en el interior de la Tierra.
La superficie del Geoide coincide aproximadamente con el nivel medio de las aguas oceánicas, supuestas
en calma y prolongadas imaginariamente por debajo de los continentes, considerando nulas las influencias de las
fuerzas de gravitación de la Luna, el Sol, de los demás astros, las fuerzas de atracción del resto de los puntos de la
Tierra y de la fuerza centrífuga debida a la rotación terrestre. 42
Al Geoide se le considera como la superficie del nivel medio del mar obtenido durante un largo período
de tiempo de observación. Es la superficie de referencia altimétrica (Datum) en la representación de las alturas y
del relieve topográfico.
El Geoide es una figura extremadamente compleja de definir matemáticamente (Figura 6.6) y utilizar
como referencia de los cálculos de las observaciones geodésicas-topográficas terrestres. Por ello, se emplea una
figura geométrica de estructura matemática más sencilla y cuya forma difiere muy poco a la del geoide: elipsoide
de revolución.
Todas estas superficies tienen la propiedad común de que si se deposita sobre ellas una partícula de agua,
ésta no sufrirá ningún desplazamiento. Es ahora sencillo entender por qué ese requerimiento adicional, claro, la
determinación de la distancia (según la dirección de la vertical) entre puntos de la superficie terrestre y una
superficie de nivel tomada como superficie de referencia nos permitirá definir, en principio, la dirección y
velocidad del escurrimiento del agua entre dichos puntos.
41
42
CNUGGI-Subcomité de Geodesia de la Republica Argentina.
GPS posicionamiento global-Huerta, Mangiaterra, Noriega
- 86 -
Figura 6.6: Geoide.
A esta altura del análisis del problema ya se pueden identificar dos componentes de origen independiente:
•
•
Una componente geométrica (coordenadas espaciales)
Una componente física vinculada al campo gravitatorio terrestre (vertical o superficie de nivel).
Desde ya se puede mencionar que un problema central es definir correctamente las superficies de nivel.
Como ya se adelantó la configuración de estas superficies de nivel, dependerá de la distribución de masas en el
interior de la Tierra, que es desconocida.
6.4.2.
ELIPSOIDE DE REVOLUCIÓN
Desde el punto de vista geométrico, las coordenadas cartesianas, aunque adecuadas para el cálculo, no
proporcionan una idea clara e inmediata de la posición de los puntos sobre la superficie terrestre. Por esa razón, en
geodesia, es usual referir la posición espacial de puntos a una superficie que aproxime la forma de la Tierra. En
ese sentido se define como superficie geométrica de referencia la que corresponde a un elipsoide de revolución.
La forma y dimensión del elipsoide de revolución (Figura 6.7) terrestre queda determinado por dos
parámetros un semieje mayor (a) y un semieje menor (b), además es necesario definir su ubicación y orientación.
Figura 6.7: Elipsoide.
Tanto su forma y dimensiones, dadas por a y b, como su ubicación y orientación se obtienen tratando de
ajustarlo de la mejor manera posible al geoide. El centro del elipsoide coincide así con el origen del sistema
cartesiano y el semieje menor con el eje Z. (Figura 6.8)
- 87 -
Figura 6.8: Comparación Elipsoide-Geoide
Es posible entonces obtener las coordenadas elipsóidicas o geodésicas B, L y h (Figura 6.9).
Figura 6.9: Coordenadas Elipsóidicas.
De esta manera cada sistema de referencia geodésico tendrá asociado un elipsoide de revolución.
Las coordenadas geodésicas del punto P se definen de la siguiente manera:
•
•
•
Latitud geodésica B es el ángulo entre el plano del Ecuador y la normal al elipsoide que pasa por
el punto P medida en el plano del meridiano del punto. El origen de las latitudes es el Ecuador y
varía entre 0° y 90° en el hemisferio norte y entre 0° y -90° en el hemisferio sur.
Longitud geodésica L es el ángulo del diedro determinado por el meridiano de Greenwich, es
decir el plano (x, z) y el meridiano que contiene al punto P. La longitud varía entre 0° y 180°
medida desde el meridiano de Greenwich hacia el este y 0° y -180° medida desde el meridiano de
Greenwich hacia el oeste.
Altura geodésica h es la distancia entre el punto y el elipsoide medida a lo largo de la normal al
elipsoide. La altura es positiva por encima del elipsoide y negativa por debajo de él.
La utilización de este último tipo de coordenadas permite ubicar al punto en altura por medio de h (en este
caso respecto del elipsoide adoptado) y determinar la posición de su proyección sobre el elipsoide por medio de B
y L.
Resumiendo se puede decir que tanto las coordenadas cartesianas geocéntricas (x, y, z), las polares (ρ, λ,
β) como las coordenadas geodésicas (B, L, h) representan formas distintas de expresar la posición espacial de un
punto. Existen fórmulas que permiten realizar las conversiones entre estos diferentes tipos de coordenadas.
- 88 -
A modo de ejemplo, se puede decir que típicamente las coordenadas cartesianas rectangulares se utilizan
en geodesia espacial y en microgeodésia, las polares en campo de gravedad, las coordenadas elipsóidicas se
utilizan en geodesia clásica y sus representaciones planas en cartografía. 43
6.5. GEODESIA CLÁSICA
La geodesia clásica realizaba sus levantamientos a partir de un punto origen al que previamente se le
asignaban coordenadas elipsóidicas con el auxilio de la astronomía geodésica y de la nivelación geométrica de
precisión. Este origen tiene asociado también una orientación (acimut) necesaria para el posterior levantamiento
de puntos. A partir de ese origen se transportaban las coordenadas B y L a otros puntos de la red basándose en
mediciones angulares, de distancias y del cálculo elipsóidico correspondiente.
La tercer coordenada geodésica h (altura elipsóidica), aunque conjuntamente con B y L permiten ubicar
unívocamente un punto en el espacio, en general, para la geodesia clásica fue imposible determinarla, es decir,
que se trataba de levantamientos bidimensionales.
Junto con las coordenadas geodésicas B y L era usual que se publicara la altitud medida respecto de una
superficie equipotencial, usualmente el geoide, denominada ortométrica, la cual puede obtenerse en una primera
aproximación por medio de nivelación geométrica de precisión.
Por esta razón, en la República Argentina, con el uso de la geodesia clásica se han materializado sobre el
territorio las siguientes redes:
•
•
6.5.1.
Por un lado, la red de puntos trigonométricos (con sus correspondientes pilares de acimut)
constituida por un conjunto de puntos monumentados con las coordenadas geodésicas B (latitud)
y L (longitud) correspondientes.
Por otro, las redes de nivelación, referidas a las alturas de algunas estaciones mareográficas (que
definen el nivel medio del mar), también materializadas por un conjunto de mojones de los cuales
se determinaron las alturas ortométricas aproximadas H. 44
LEVANTAMIENTO GEODÉSICO
Para la geodesia clásica ha sido imposible definir un Sistema de Referencia único para todo el planeta. Así
es que existen múltiples marcos de referencia geodésicos en los que el ajuste entre elipsoide y geoide se planteaba
a nivel regional, con un origen que en general se encontraba desplazado respecto del geocentro.
Cabe destacar que un Marco de Referencia es la materialización de un Sistema de Referencia
El procedimiento utilizado para definir este tipo de marcos de referencia regionales ha sido el siguiente:
En un punto elegido como origen del levantamiento
•
•
•
•
6.5.2.
Se determinaba la altura H sobre el nivel medio de mar mediante nivelación geométrica de
precisión.
Se determinaban las coordenadas astronómicas: latitud ϕ, y la longitud ω mediante Astronomía
Geodésica.
Se determinaba un acimut astronómico de orientación en el arranque mediante Astronomía
Geodésica.
Se realizaba la medición de una longitud denominada base.
ASIGNACIÓN DE COORDENADAS DEL ORIGEN P (B, L, h)
B = ϕ aproximación válida en el orden de 200 m
43 42
GPS posicionamiento global-Huerta, Mangiaterra, Noriega.
- 89 -
L = - ω aproximación válida en el orden de 200 m
El orden de las aproximaciones indicadas anteriormente se debe a que mientras las coordenadas
astronómicas están referidas a la dirección de la vertical, las coordenadas geodésicas están referidas a la dirección
de la normal, el ángulo entre ambas direcciones es el denominado desvío de la vertical.
h = H aproximación válida en el orden de 50 m.
El orden de la aproximación anterior se debe a que la altura ortométrica está referida al geoide mientras
que la altura elipsóidica está referida al elipsoide.
Es decir que en la geodesia clásica las redes son calculadas sobre un elipsoide propio no centrado cuya
ubicación y orientación dependerá del punto de arranque elegido.
En la República Argentina durante las últimas décadas y hasta mayo de 1997 el marco de referencia
oficial fue el denominado Campo Inchauspe 1969 (CAI69), el que fuera definido mediante los procedimientos
indicados y que son propios de la geodesia clásica. El elipsoide asociado a dicho marco es el de Hayford de 1924.
Su origen y orientación espacial se ajustaron para que fuera tangente al geoide en el paraje Campo Inchauspe
ubicado en la provincia de Buenos Aires. 45
6.6. GEODESIA SATELITAL
A partir de las observaciones satelitales es posible determinar la posición espacial de puntos terrestres, a
través de tres coordenadas que estarán referidas a un sistema de referencia global.
Según la definición convencional adoptada por la Asociación Internacional de Geodesia y por la Unión
Astronómica Internacional, el Sistema de Referencia Terrestre Internacional (ITRS) es una terna tri-rectangular
de mano derecha, de ejes x, y, z, cuyo origen coincide con el centro de masas de la Tierra, su eje z pasa por el polo
convencional terrestre definido por el Servicio Internacional de Rotación de la Tierra (IERS). Los ejes x e y son
perpendiculares al eje z, con el eje x definido por la intersección del meridiano de Greenwich, también definido
por el IERS, y el plano del ecuador terrestre. Con el aporte de los servicios científicos de la Asociación
Internacional de Geodesia, ha sido posible materializar sobre la superficie terrestre sistemas de referencia
geocéntricos en los cuales el ajuste entre elipsoide y geoide se plantea a nivel global. Cada uno de estos servicios
utiliza una técnica de observación distinta:
•
•
•
45 46
,
Servicio Internacional de GPS (International GPS Service. IGS)
Servicio Internacional de rastreo láser (International Láser Ranging Service. ILRS)
Servicio Internacional de Interferometría sobre líneas de base muy largas para geodesia y
astronomía (International VLBI Service for Geodesy and Astrometry. IVS). 46
GPS posicionamiento global-Huerta, Mangiaterra, Noriega.
- 90 -
CAPITULO 7
SISTEMAS Y MARCOS DE REFERENCIA GEODÉSICO PARA LA REPÚBLICA
ARGENTINA
7.1. INTRODUCCION
En todo trabajo geodésico, y/o cartográfico, tenemos la necesidad de ubicar o posicionar puntos sobre la
superficie terrestre, lo que implica definir un Sistema de Referencia de la cual definiremos como:
Un sistema de referencia geodésico es un recurso matemático que permite asignar coordenadas a puntos
sobre la superficie terrestre.47
Sistema de Referencia: es un conjunto de parámetros ideales y/o abstractos fijados a priori, que van a
marcar las pautas para referir o vincular otros subconjuntos o puntos.
Marco de Referencia: es el conjunto de elementos físicos visibles, que materializan y que sustentan el
sistema de referencia.
Datum: Origen del sistema de coordenadas. 48
En el marco de la utilización de un sistema de referencia, se debe hacer una reseña de que existen tres
sistemas de referencia, ellos son:
•
•
•
Sistema de referencia LOCAL
Sistema de referencia GEODESICO
Sistema de referencia GEOCENTRICOS
7.2. SISTEMA DE REFERENCIA LOCAL
Un sistema de referencia local, que, como su nombre lo expresa es de cobertura reducida, no es universal.
En levantamientos topográficos clásicos, se emplea generalmente un Sistema de Coordenadas Topocéntrico, el
cual no es otra cosa más que un sistema local, consistente en una terna ordenada de ejes cartesianos con origen
planimétrico en un punto arbitrario de la superficie terrestre.
Al estar el sistema local estrechamente vinculado al campo gravífico terrestre, se lo denomina Sistema
Topocéntrico Físico.
El sistema de coordenadas que se emplea es muy particular, ya que como la palabra lo dice, sistema local,
las mismas son elegidas arbitrariamente, no presentan ningún patrón en especial, lo cual, al trabajar de este modo
vemos que estamos eligiendo dos Datum, de lo que podemos citarlos de la siguiente manera:
•
•
47
48
Datum Horizontal (origen de X e Y). Ubicado sobre el plano horizontal de referencia.
Datum Vertical (origen de las Z). Geoide.
Asociación Argentina de Geofísicos y Geodestas
Apuntes Del Bianco año 2000
- 91 -
Figura 7.1: Sistema de Referencia Topocéntrico
En los Levantamientos topográficos clásicos, el método de relevamiento empleado es el levantamiento
Polar. Cada punto del terreno queda referenciado al Punto estación mediante las Coordenadas Polares del vector:
•
•
•
Rumbo (φ)
Distancia Cenital (z)
Distancia inclinada (λ)
Figura 7.2: Levantamiento Polar del sistema topocéntrico.
Con lo demostrado se llega a la conclusión que este tipo de sistema de referencia es sin lugar a duda
muy acotado, es decir, de uso zonal pero con ciertas limitaciones.
7.3. SISTEMA DE REFERENCIA GEODESICO
Un sistema de referencia geodésico queda definido por la elección de un elipsoide de referencia y por un
punto origen (Datum) donde es aquél en el que se hace coincidir la vertical del lugar con la normal al elipsoide y
generalmente se establece la condición de tangencia entre el elipsoide y el geoide. El elipsoide así elegido y
posicionado, se adapta bien la probabilidad de que esta adaptación aminore. Por esta razón los sistemas así
definidos fueron utilizados por países o grupos de países permitiendo llevar adelante todos los proyectos
geodésicos en sus respectivos territorios.
- 92 -
Figura 7.3: Sistema de Referencia Geocéntrico.
Al pasar a un sistema de referencia geodésico estamos hablando que en la zona en la cual se esta
trabajando es de gran superficie, es la diferencia sustancial con un sistema de referencia local topocéntrico. Es por
ello que es denominado un sistema de referencia general, porque cuando la extensión del trabajo es regional y
los parámetros que definen el sistema son adoptados para un país.
Es evidente que en otro punto cualquiera de la superficie terrestre, la normal al Geoide y la normal al
elipsoide formarán un ángulo que se denomina desviación relativa de la vertical.
Figura 7.4: Desviación relativa de la vertical.
El valor de éste ángulo, dependerá del modelo de elipsoide elegido, del punto astronómico fundamental,
de la forma como se realizó el traslado de las coordenadas, etc.
La determinación de esta desviación en muchos puntos terrestres, nos proporciona la posibilidad de juzgar
si el geoide coincide o no con el elipsoide adoptado. La desviación de la vertical, nos da al mismo tiempo la
inclinación entre ambas superficies de referencias, la cual a su vez nos permite calcular la magnitud de la
separación que entre ellas se produce.
Generalmente un sistema de referencia esta generado por una terna de ejes ortogonales, pero en muchos
casos, como se menciono anteriormente se emplea superficies auxiliares de referencias, llamadas elipsoide de
referencia.
Debido a diferentes expediciones como fueron la de Laponia y Perú, se sucedieron mediciones mas
precisas que fueron determinando la adopción de elipsoides mas concretas en el estudio geodésico de cada región.
- 93 -
Elipsoide
Delambre
Walbeck
Everest
Bessel
Airy
Struve
Clarke
Clarke
Helmert
Hayford
Krassovsky
Hough
Fecha
1799
1810
1830
1841
1849
1860
1866
1880
1907
1909/24
1940
1956
Semieje mayor (a)
6.375.653
6.376.855
6.377.276
6.377.397
6.377.480
6.378.298
6.378.206
6.378.249
6.378.200
6.378.388
6.378.245
6.378.270
Achatamiento (f)
1/334,00
1/302,78
1/300,80
1/299,15
1/299,33
1/299,73
1/294,94
1/293,46
1/298,30
1/297,00
1/298,30
1/297,00
Tabla 7.1: Tipos de Elipsoides I
Posteriormente, basándose en observaciones de satélites artificiales, han sido propuestos los siguientes
elipsoides.
Elipsoide
Kaula
Vais
Geodestic Reference
System (GRS)
Lamberck
Word Geodestic
System
Rapp
Khan
Gaposchkin
Word Geodestic
System
Fecha
1961
1965
Semieje mayor (a)
6.375.653
6.376.142
Achatamiento (f)
1/298,24
1/298,25
1967
6.378.160
1/298,25
1971
6.378.140
1/298,25
1972
6.378.135
1/298,26
1973
1973
1973
6.378.142,8
6.378.142
6.378.140,4
1/298,256
1/298,255
1/298,256
1980
6.378.137
1/298,25722
Tabla 7.2: Tipos de Elipsoides II
En el año 1922, en una asamblea realizada en Roma, la Unión Internacional de Geodestas (IAG) decide
adoptar un único modelo de elipsoide válido universalmente, dado que cada Nación había adoptado su propio
elipsoide de referencia. Luego de intensas disputas, en el congreso realizado en el año 1924 en Madrid, se
resuelve adoptar como elipsoide internacional al elipsoide de Hayford, con la siguiente recomendación:
“Se recomienda el uso del elipsoide de Hayford a todos los hombres de ciencia, cada vez que su obra involucre la
figura y dimensiones de la tierra (incluye esto) a todos los trabajos de triangulación y de levantamientos
topográficos, adoptando un nuevo elipsoide más moderno y exacto”
En consecuencia de la recomendación de la IAG, el Instituto Geográfico Militar Argentino, ese mismo
año adoptó como superficie de referencia el elipsoide de Hayford, también adoptó la proyección conforme de
Gauss y el sistema de coordenadas denominada Gauss-Krüger, y el punto fundamental de la Argentina (punto de
tangencia entre geoide y elipsoide) en el cual coinciden las coordenadas astronómicas con las coordenadas
geodésicas, ese punto es el pilar de triangulación del Observatorio Nacional de Córdoba
7.3.1.
MARCOS DE REFERENCIAS GEODESICOS
A pesar que en el año 1924 se decidiera la utilización de un único sistema de referencia geodésico para
todo el país, cuyo punto fundamental estaba ubicado en la ciudad de Córdoba, dadas las urgencias de los tiempos
que requerían de inmediata producción cartográfica, y no podían esperar la lenta y tediosa construcción de redes
geodésicas que fuesen materializando el marco de referencia por tan extenso territorio, trajo como consecuencia
- 94 -
que se fuesen creando muchos sistemas de referencias que aun en la actualidad están vigentes. Para definir cada
uno de ellos fue necesario precisar previamente un datum, de los que podemos nombrar:
Sistema
Provincia / s
25 de Mayo, I y II orden
25 de Mayo, III y IV orden
Castelli
San Juan
San Juan
Buenos Aires
Neuquén, Mendoza,
Río Negro, La Pampa
Catamarca
Corrientes, Misiones
Chubut, Santa Cruz
Santa Cruz
Entre Ríos, Corrientes
Jujuy
Jujuy
Chos Malal
Cumbicha, I y II orden
Malezales Correntinos, I y II orden
Pampa del Castillo
Tapia-Hache, III y IV orden
Ubajay
Ravi, I orden
Ravi, II orden
Cantidad de puntos
Total Comunes a CAI
62
24
74
43
53
2
MEC.
Segarra.
1,4
3,4
1
700
35
4,3
27
14
95
258
127
14
18
20
44
3
30
6
4
9
1
2
0,6
2,7
0,8
1,3
1,8
Tabla 7.3: Marcos de referencia Nacionales
Los sistemas antiguos establecidos por el Instituto Geográfico Militar reducidos a Campo Inchauspe 1969
se incluyen en la tabla, donde se menciona su nombre, las provincias que cubren, la cantidad de puntos y el error
medio cuadrático de la unidad de peso al calcularse sometido a Campo Inchauspe. En algunos casos están
separados por su orden y en otros constituyen un conjunto de cálculo, a veces agrupados por sectores, por lo que
el error representa el promedio de estos.
En el caso del sistema Castelli que cubría las provincias de Buenos Aires, Entre Ríos, Corrientes,
Misiones, Córdoba, Mendoza y San Juan, sólo fue recuperada la red de la provincia de Buenos Aires al Este del
meridiano -58º. El sistema Huemules, ubicado en Chubut y Santa Cruz, no fue reducido a Inchauspe 1969.
Existen además sistemas ejecutados por distintas entidades nacionales que no fueron incorporados a la red
oficial, y cuyos datos originales o reducidos a Inchauspe 69 deberían ser requeridos a los entes ejecutores.
Mencionaremos entre ellos:
•
•
•
7.3.1.1.
Las redes costeras desarrolladas por el Servicio de Hidrografía Naval,
Los sistemas fronterizos ejecutados por las comisiones mixtas limítrofes, con la participación de
la Comisión Nacional de Límites Internacionales, y
Los sistemas Aguaría, Pampa del Castillo, Chos Malal y Qin-Uoa extendidos por YPF.
CAMPO INCHAUSPE 1969
Es la red ejecutada por la Facultad de Ingeniería de la Universidad de Buenos Aires. Este sistema, que si
bien no está reducido a Inchauspe 69, fue calculado en 1978 con los programas de compensación del Instituto
Geográfico Militar. La red está integrada por 37 estaciones, un punto de fijo de origen (el extremo Norte de la
base Uspallata), dos acimutes de Laplace y tres bases. El error medio cuadrático de la unidad de peso del ajuste
fue de 0.7”.
El sistema Campo Inchauspe tiene su origen en el punto astronómico fundamental del mismo nombre
ubicado en las proximidades de la intersección del meridiano -62° con el paralelo -36° cerca de la ciudad de
Pehuajó en la provincia de Buenos Aires, Argentina.
- 95 -
Figura 7.5: Mojón Campo Inchauspe.
Alrededor de dicho punto se iniciaron los trabajos de la triangulación fundamental que en 1954 alcanzó a
cubrir un área de 10 polígono los que fueron compensados por métodos manuales en el mismo año y que
constituyo la primera red de envergadura ejecutada en el país. Las coordenadas resultantes se conocieron como
Campo Inchauspe 1954.
Figura 7.6: Marco de referencia Campo Inchauspe 69.
- 96 -
Luego a la compensación de la red fundamental siguieron las compensaciones de las redes de
densificación de primer y segundo orden medidas para la época. Esta red y sus coordenadas recibieron el nombre
de Campo Inchauspe 1969.
Ya finalizados los trabajos de triangulación y poligonación, la red Inchauspe cuenta con 44 anillos
cerrados, compensados manteniendo fijas las coordenadas resultantes del cálculo de 1969, incluyendo un total de
18000 puntos. Los estimadores internos de exactitud de la red, que se utilizaron para controlar el trabajo,
indicaron errores de aproximadamente 15 cm para lados de 30 km de longitud promedio, lo que implica entre 3 y
10 ppm. Comparaciones posteriores respecto de sistemas independientes indican exactitudes en los vectores de
entre 2.7 ppm y 3.3 ppm. 49
Antes de definirse Campo Inchauspe como el sistema nacional existieron otras redes, generalmente
localizadas en un área, y también después de la iniciación de los trabajos de la red Inchauspe se ejecutaron otras
redes en áreas distantes del núcleo central.
7.3.1.2.
MARCOS POSTERIORES A CAMPO INCHAUSPE 69
Valen la pena destacar dos esfuerzos hechos por la comunidad geodésica antes de llegar a POSGAR y
SIRGAS. SAD69 fue un ambicioso intento de definir una red continental mediante mediciones clásicas en
América del Sur, un antecedente de SIRGAS, que no tuvo ni la suerte ni la trascendencia de este último.
La red DOPPLER establecida por la Agencia de Mapeo y Defensa (DMA, actualmente NIMA) mediante
observaciones del efecto Doppler a los satélites TRANSIT, es el principal antecedente para Sudamérica de una
red geodésica basada en observaciones a satélites.
7.3.1.2.1.
SAD 69 (South American Datum 1969)
En 1944 la Comisión de Cartografía del Instituto Panamericano de Geografía e Historia (IPGH) declaró la
necesidad de establecer un marco de referencia continental en América del Sur utilizando un conjunto de
estaciones distribuidas por todo el continente, conectadas mediante cadenas de triangulación de alta precisión. Se
utilizaría la infraestructura geodésica existente en los distintos países y habría que conectar las redes geodésicas
entre ellos para lograr un marco de referencia suficientemente rígido.
Dos años después se recomendó que el punto datum estuviera aproximadamente en el centro del
continente, en una zona que abarca parte de los territorios de Argentina, Bolivia, Brasil y Paraguay. Las
dificultades que la zona elegida tenía para la ejecución de los costosos relevamientos necesarios, determinaron
que el proyecto no presentara avances significativos hasta bien entrada la década del sesenta.
En 1965, 50 en América del Sur, se decidió cambiar de estrategia y seleccionar el punto datum dentro de
los ya existentes en el continente.
Entre 1967 y 1969 se mejoraron las redes de control de los países. Se realizó luego un cálculo siguiendo
dos circuitos fundamentales:
•
•
El circuito Sur partió del sur de Brasil hacia Argentina y Uruguay, luego hacia el norte y al oeste
hasta Chile pasando por Bolivia, y nuevamente hacia el este hasta Brasil.
El circuito Norte partió de Bolivia, pasando por Perú, Ecuador, Colombia, Venezuela, y
volviendo por último a Brasil para conectarse con el otro circuito en el sur de ese país.
Los errores de cierre de estos dos circuitos, de miles de kilómetros de extensión, alcanzaron varios
metros, que fueron repartidos por toda la red en una compensación. El resultado del trabajo fue presentado y
aprobado en 1969 en “XIth Pan American Consultation on Cartography” como “South American Datum 1969”,
o simplemente SAD69.
49
Rodríguez, 1999.
Sistemas Geodésicos, Comité Nacional de la Unión Geodésica y Geofísica Internacional.
50
Fischer et al., 1965.
- 97 -
El punto adoptado como datum fue el de Chua, en Brasil, cuyas coordenadas son:
λ: 19º 45’ 41,6527”
φ: 48º 06’ 04,0639”
El elipsoide adoptado fue a=6.378.160 metros y 1/f= 298,25.
Los controles con técnicas de geodesia satelital se realizaron poco después, mostraron, por ejemplo, en un
triángulo sobre la zona central de la Argentina, diferencias en las distancias de 1 metro en vectores de varios
cientos de kilómetros. 51
A pesar de contar con coordenadas SAD69 en muchos puntos de la red Inchauspe’69, este sistema no fue
finalmente adoptado en nuestro país por el IGM ni tampoco lo adoptaron oficialmente las comisiones de límites
internacionales.
7.3.1.2.2.
LA RED DOPPLER
A fines de los años ´70, en muchos países latinoamericanos se realizaron mediciones con el sistema
satelital de navegación TRANSIT 52. En la Argentina durante 1978 se ocuparon 18 estaciones Laplace de la red
Inchauspe. Los resultados de la red DOPPLER mostraron la capacidad de los métodos de la geodesia satelital para
la materialización de marcos de referencia de gran extensión ya que se logró determinar coordenadas respecto de
un sistema de referencia global con un error de poco más que un metro. 53
Sin embargo habría que esperar a la aparición del sistema GPS para que, merced a sus ventajas técnicas y
logísticas, los métodos satelitales desplazaran definitivamente a los clásicos en la materialización del sistema de
referencia geodésico nacional.
7.4. SISTEMAS DE REFERENCIA GEOCENTRICOS
Se define como un sistema geocéntrico aquél que especifica una terna de ejes ortogonales cartesianos X,
Y, Z centrado en el centro de masas de la tierra. Estos sistemas terrestres (fijados a la Tierra) tienen el eje X
solidario al meridiano origen de las longitudes y el eje Z próximo al eje de rotación, por lo tanto este sistema
“gira” juntamente con la tierra. Estos sistemas resultan imprescindibles para ubicar puntos ligados al planeta
Tierra.
A diferencia de los sistemas geodésicos locales, los sistemas geocéntricos son tridimensionales y de
alcance global. Es por ello que también son llamados Sistemas de Referencias Absolutos o Globales, debido a que
son de extensión mundial.
En estos sistemas, el elipsoide geométrico de referencia, está centrado en coincidencia con el Centro
de Masas de la Tierra. Lo que se intenta que el elipsoide de revolución compense en volúmenes las ondulaciones
del geoide.
En los Sistemas de Referencias Geocéntricos el datum horizontal coincide con el datum vertical, es decir
existe un solo y único datum
En la XVII Asamblea General de la Unión Geodésica Internacional (IAG), celebrada en Camberra en
1979, fue establecido un nuevo cambio aprobado por la Unión Geodésica y Geofísica Internacional (IUGG) en su
resolución N°7 que asigna al elipsoide terrestre las siguientes dimensiones:
IUGG (1980)
a = 6.378.137 m
f = 1/298,257222101
Este fue el denominado Sistema geodésico de Referencia 1980 (GRS 80).
51
Fischer, 1972.
52
Walker, 1977
53
Rodríguez, 1987.
- 98 -
Figura 7.7: Sistema de Referencia Geocéntrico.
Posteriormente evolucionó manteniendo el valor del semieje mayor “a”, pero ajustando el valor del
achatamiento “f”. El nuevo elipsoide, es el utilizado en el denominado Word Geodestic System 1984 (WGS 84).
La denominación WGS 84 sirve para nombrar, tanto al sistema geodésico de referencia, como el elipsoide que
este sistema emplea. Sus parámetros son los siguientes
WGS 84
7.4.1.
a = 6.378.137 m
f = 1/298,257223563
SISTEMA WGS ´84
El acrónimo WGS ´84 deviene de World Geodestic System 1984 (Sistema geodésico Mundial de
1984). Se trata de un sistema de referencia creado por la Agencia de Mapeo del Departamento de Defensa de los
Estados Unidos de América (Defense Mapping Agency – DMA) para sustentar la cartografía producida en dicha
institución y las operaciones del Departamento de Defensa (DoD).
Estuvo estrechamente ligado al desarrollo del Sistema de Posicionamiento Global (GPS) sirviendo
durante mucho tiempo para expresar las posiciones tanto de los puntos terrestres como de los satelitales
integrantes del segmento espacial (a través de las efemérides transmitidas).
Figura 7.8: WGS 84.
- 99 -
El WGS ´84 (figura 7.8) no es solo un sistema geodésico fijado a la tierra (ECEF) de ejes X, Y, X, sino
también un sistema de referencia para la forma de la tierra (elipsoide) y un modelo gravitacional.
También, éste se ha popularizado por el uso intensivo de GPS y se han determinado parámetros de
transformación para convertir coordenadas a todos los sistemas geodésicos locales y otros sistemas geocéntricos.
7.4.1.1.
DEFINICIÓN
Es un Sistema Convencional Terrestre (CTS) tal que
•
•
•
•
•
El origen de coordenadas X Y Z es el centro de masas de la Tierra.
El eje Z pasa por el Polo Convencional terrestre (CTP) definido por el Bureau
Internacional de la Hora (BIH) para la época 1984.0
El eje X es la intersección entre el meridiano origen de longitudes definido por el BIH
para la época 1984.0 y el plano del ecuador CPT.
El eje Y completa con los ejes anteriores una terna derecha de ejes fijos a la Tierra, está
en el Ecuador, a 90° al este del eje X.
Origen de la terna así definida sirve además de centro geométrico del elipsoide WGS’84,
y el eje Z es su eje de revolución.
Otros parámetros son:
PARÁMETRO
Velocidad de Rotación Terrestre
Constante Gravitacional
Factor de forma Dinámica
Velocidad de la luz
Semieje menor del elipsoide (b)
Aplanamiento del elipsoide (f)
Aceleración de la gravedad en el Ecuador
Primera Excentricidad (e)
Coeficiente gravitacional de segundo grado normalizado
VALOR
ω = 72,92115 x 10-6 rad/s
398.600,5 x 109 m3/s2
J2 = 108263 x 10-8
299.792.458 m/s
6.356.752,3141 m
1 / 298,257839303
978.032,6 mgal
e2 = 0,00669438002290
C20 = -484,16685 x 10-6
Segunda Excentricidad
Excentricidad Angular
Excentricidad Lineal
Radio de Curvatura del meridiano
Radio de Curvatura del Primer vertical
0.0067394.96659
Cs=0.9966471893
Sen=0.08181919034
Tan=0.08209443744
E=521854.0052
m=0.003358431261
n=0.001679220406
Tabla 7.4 Constantes WGS 84
7.4.1.2.
RELACIÓN DE WGS 84 CON OTROS SISTEMAS GEOCÉNTRICOS Y
SISTEMAS LOCALES
CON
Probablemente ningún sistema geodésico haya sido tan estudiado en relación con todos los demás como el
WGS 84. Un ejemplo de esto es la reciente determinación de los parámetros de transformación con el sistema PZ90, utilizado por la constelación GLONASS que está siendo integrada actualmente al sistema GPS. Existe un
extenso software para transformar WGS 84 a cada uno de los sistemas geodésicos locales y geocéntricos,
incluyendo los instantáneos ITRF.
7.4.1.3.
ACTUALIZACIONES DEL SISTEMA
El sistema WGS’84 se ha ido desactualizando con el correr de los años. La serie de sistemas ITRF, en
cambio, se modifican anualmente y han llegado a un orden de precisión muy superior.
- 100 -
Debido a esto, y teniendo en cuenta las mayores demandas del Departamento de Defensa de los Estados
Unidos de América, se han producido en los últimos años una serie de refinamientos y mejoras en el sistema, de
manera de permitir su uso en las aplicaciones de muy alta precisión.
Este esfuerzo dio por resultado un marco de referencia para el WGS84 que es coincidente con ITRF92
dentro de los 10cm. Este marco de referencia mejorado se conoce como WGS 84 (G730).
El único parámetro afectado por esta mejora fue GM = 3986004.418 x 108 m3s-2. Comparado con el
anterior, resulta una diferencia muy pequeña, dentro del error estándar del parámetro.
La mejora no ha tenido ningún efecto sobre el desarrollo de la cartografía. Sin embargo, se estudian otras
modificaciones que incluyen nuevas definiciones del geoide, que resultarán en una mayor calidad de cartas y
mapas.
7.4.2.
SISTEMA DE REFERENCIA. DATUM PZ 90
Las efemérides GLONASS están referidas al Datum Geodésico Parametry Zemli 1990 o PZ-90, o en su
traducción Parámetros de la Tierra 1990 o PE-90. Este sistema reemplazó al SGS-85, usado por GLONASS hasta
1993.
El sistema PZ-90 es un sistema de referencia terrestre con coordenadas definidas de la misma forma que
el Sistema de Referencia Internacional Terrestre (ITRF). Las constantes y parámetros del PZ-90 se muestran en la
siguiente tabla:
PARÁMETRO
Velocidad de Rotación Terrestre
Constante Gravitacional
Constante Gravitacional de la Atmósfera
Velocidad de la luz
Semieje mayor del elipsoide (a)
Aplanamiento del elipsoide (f)
Aceleración de la gravedad en el Ecuador
VALOR
ω = 72,92115 x 10-6 rad/s
398.600,44 x 109 m3/s2
0,35 x 109 m3/s2
299.792.458 m/s
6.378.136 m
1 / 298,257839303
978.032,8 mgal
Tabla 7.5: Constantes PZ 90
La realización del Sistema PZ-90 por medio de la adopción de coordenadas de estaciones de referencia ha
dado como resultado el desfase en el origen y orientación de los ejes, así como la diferencia en escala con
respecto al ITRF y al Sistema WGS-84 también.
La aceptación de un sistema de referencia implica aceptar como fijo una serie de parámetros físicos y
geométricos como son geoide y elipsoide.
7.4.3.
EL SISTEMA TERRESTRE INTERNACIONAL
Desde principios del siglo XX han existido organismos internacionales cuya misión estaba íntimamente
relacionada con la rotación de la Tierra, y como consecuencia inevitable, con la definición y materialización de un
sistema de referencia terrestre respecto del cual se determina la posición variable del eje de rotación.
En este marco se establece el Internacional Earth Rotation Service (IERS) con una estructura compleja
que comienza a funcionar a partir de 1988.
La definición actual del Sistema de Referencia Terrestre (ITRS) es consistente con la anterior en cuanto
procura que el eje polar medio de la Tierra este orientado en la misma dirección que el OCI y el origen de las
longitudes sea común con el usado radicionalmente (próximo al meridiano de Greenwich). Con esta definición,
los parámetros de la rotación terrestre que se determina actualmente están referidos al mismo sistema que los que
se observaban desde hace un siglo aproximadamente.
- 101 -
Estas definiciones permiten establecer una terna de ejes tales que el eje Z esta dirigido al polo medio, el
eje X, sobre el plano ecuatorial (perpendicular al eje Z) y dirigido al punto origen de las longitudes, y el eje Y
sobre el mismo plano y perpendicular a los anteriores de forma que formen una terna derecha.
Figura 7.9: ITRS.
El origen de este sistema es el baricentro de la Tierra, incluyendo a la atmósfera y la unidad de longitud es
el metro.
La materialización de este sistema de es un Marco de Referencia Internacional (ITRF) constituido por un
conjunto de coordenadas y velocidades geocéntricas de unas 180 estaciones con precisión de 1 a 3 cm en
coordenadas y de 2 a 5 mm/año en velocidades. El campo de velocidades es tal que la suma de las velocidades
horizontales de todo los puntos que lo materializan es nula. Esto hace que, si bien cada punto esta animado de una
velocidad con respecto a los demás, el conjunto tiene velocidad cero. Lo contrario significaría aceptar que todo el
marco de referencia esta animado de una velocidad no nula.
7.4.3.1.
MARCOS DE REFERENCIAS GEOCENTRICOS
7.4.3.1.1.
SISTEMA ITRF
El International Terrestrial Reference Frame o Marco Internacional de Referencia Terrestre, tiene la
característica que la precisión alcanzada en la determinación de coordenadas terrestres obliga a un cambio
conceptual:
“no es posible materializar un sistema terrestre en base a coordenadas fijas, porque a nivel de la precisión
centimétrica, ninguna estación ubicada sobre la superficie terrestre puede considerarse fija, todas están
animadas de movimiento principalmente debidos a movimientos de las placas tectónicas en las que están
asentadas.” 54
Las técnicas de observación que contribuyen a la materialización de sus productos son las siguientes:
•
•
•
•
•
VLBI: medición de radiofuentes extragalácticas por medio de radiotelescopios
SLR: medición de distancias láser a satélites específicos desde telescopios especiales.
LLR: medición de distancias láser a la Luna desde telescopios especiales
GPS: medición de distancias a satélites GPS con receptores específicos.
DORIS: medición de variación de distancias desde satélites específicos a balizas orbitográficas.
Todas ellas aportan diferentes elementos para la solución de distintos problemas, que son combinados por
el IERS para la producción de resultados aplicables a distintas disciplinas
54
Comité Nacional de la Unión Geodésica y Geofísica Internacional.
- 102 -
En consecuencia, el IRTF esta constituido por un conjunto de coordenadas y velocidades de las estaciones
que lo materializan. Lo cual se confirma que este marco de referencia no es estático sino que se considera UN
MARCO DE REFERENCIA DINÁMICO.
7.4.3.1.2.
TECNICAS DE OBSERVACION.
VLBI: La interferometría de muy larga base es la piedra fundamental del sistema de referencia celeste.
Consiste en la observación de emisiones de radio provenientes de fuentes extragalácticas, como son los cuásares.
Las observaciones a cada objeto se realizan mediante dos radios telescopios en forma simultánea y en las mismas
bandas de frecuencia. En general se eligen estaciones de observación separadas por miles de kilómetros. Los
registros de ambas observaciones son a posteriori correlacionadas para obtener dos observables posibles: el
retardo diferencial de la señal de radio y la diferencia de fase de la señal, para las bandas de recepción elegidas,
entre las dos antenas.
Cabe destacar que con este tipo de técnicas se pueden hacer orientaciones con exactitud del orden de 0,1
msa, lo que implica estimar las compensaciones de los vectores entre estaciones con errores subcentrimétricos.
Las estaciones VLBI que contribuyen a la realización del ITRS se encuentran organizadas en el Servicio
Internacional de VLBI (IVS).
Figura 7.10: Red de Estaciones VLBI del IVS, año 2008.
LLR (Lunar láser ranging): El principio de esta técnica es la medición del tiempo de ida y vuelta de un
pulso de luz LASER enviado desde una estación terrestre a algunos de cuatro retrorreflectores empleados en la
superficie lunar por las misiones Apollo (USA) y Lunakhod (URSS).
La técnica LLR puede materializar el sistema de referencia con errores de varios centímetros, como lo
muestran comparaciones de soluciones respecto al marco ITRF96 para las cinco estaciones en operación.
Teniendo en cuenta además que estas soluciones no incluyen las velocidades de las estaciones de observación
resulta evidente que su exactitud se encuentra por debajo de las demás técnicas.
SLR (satellite láser ranging): Esta técnica es similar a la LLR pero sus estaciones estas montadas sobre
satélites, es uno de los pilares fundamentales para la materialización del ITRS. Desde sus comienzos hasta el
presente, la precisión de las observaciones fue mejorando desde varios metros en sus comienzos a menos que un
centímetro actualmente. Para la materialización del ITRS, es la técnica geocéntrica por excelencia, permitiendo la
definición de la posición del centro de masa de la Tierra con una exactitud centrimétrica. Además, por provenir de
las mediciones de distancias, las soluciones de SLR tienen un gran peso en la materialización de la escala del
sistema de referencia. 55
55
Blewitt, 1999.
- 103 -
Figura 7.11: Red de estaciones SLR del IRLS.
GNSS: Tanto el bajo costo relativo de los receptores, como la baja necesidad de mantenimiento respecto
de las demás técnicas, hacen de los GNSS la técnica más difundida de materialización del ITRS. El número total
de receptores GNSS que contribuyen al ITRF se cuenta por varios cientos y está en continuo crecimiento. El
Servicio Internacional de GNSS (IGS) coordina los esfuerzos para determinar el marco a partir de observaciones
GNSS. Actualmente esto se logra con una exactitud de muy pocos centímetros
Figura 7.12: Estaciones GNSS de la red IGS, en su mayoría son estaciones GPS.
DORIS: El Sistema de Orbitografía por Radioposicionamiento Doppler Integrado por Satélite (DORIS)
consta de receptores montados a bordo de varios satélites artificiales. Estos reciben señales de una red que
actualmente consta de 51 balizas instaladas sobre la superficie terrestre. El receptor, ubicado en el satélite, calcula
su posición con una exactitud métrica utilizando el efecto Doppler producido por el movimiento relativo emisorreceptor. Por su concepción, el sistema DORIS tiene una red de rastreo de distribución homogénea con un
funcionamiento centralizado en Toulouse, Francia. Esta técnica contribuye a la definición del geocéntro y de la
orientación del marco. Desde fines de 1995, las soluciones DORIS constituyen un aporte relevante a la
materialización del ITRS. 56
El ITRF a través de su continua evolución permite agregar nuevas estaciones cada año y mejorar la
precisión general del conjunto. Por esa razón, cada nueva realización lleva indicado el año de su determinación,
como también, la época fundamental a la cual se refieren las coordenadas listadas (ITRF 93, o ITRF 94, época
1993.0). Esto quiere decir que ITRF 93 difiere de ITRF 94 porque se ha agregado mas información para calcular
este ultimo, lo que se traduce en pequeñas variaciones de posiciones y velocidades. En su conjunto, estas
diferentes permiten encontrar parámetros de transformación entre las distintas materializaciones del sistema
terrestre internacional.
56
Boucher et al., 1996, Boucher et al., 1998.
- 104 -
Figura 7.13: Red global de balizas DORIS. 57
Cabe mencionar que en la actualidad, estas transformaciones están en niveles milimétricos y por el
momento no tienen importancia práctica para aplicaciones geodésicas convencionales.
Mucho mas importante puede ser el efecto de las velocidades, no obstante, es importante no perder la
dimensión del problema: este efecto debe ser considerado cuando se trabaja en redes regionales que involucran
distintas placas tectónicas y, de manera especial, cuando se utilizan distintas estaciones con coordenadas ITRF
definidas en una época original.
ITRF disponibles:
•
•
•
•
•
•
•
•
ITRF 2008
ITRF 2005
ITRF 2000
ITRF 97
ITRF 96
ITRF 94
ITRF 93
ITRF 92
ITRF 2008 es la nueva materialización del Sistema de Referencia Terrestre Internacional. Siguiendo el
procedimiento que se utilizo para la formación del ITRF 2005, éste utiliza como series temporales de datos de
entrada en las posiciones de la estación y los parámetros de la Tierra de Orientación (POE) proporcionada por los
Centros de la técnica de las cuatro técnicas espaciales geodésicas (GPS, VLBI, SLR, DORIS). Sobre la base de
soluciones completamente reprocesado de las cuatro técnicas, el ITRF 2008 se espera que sea una solución
mejorada en comparación con ITRF 2005.
7.4.3.2. SISTEMA POSGAR (Posiciones Geodésicas Argentinas)
A comienzos de la década del ´90, especialistas de la Universidad Nacional de La Plata (UNLP) y el
Instituto Geográfico Militar (IGM) hoy Instituto Geográfico Nacional (IGN) analizaban la posibilidad de
materializar un nuevo marco de referencia utilizando observaciones GPS. Diversos trabajos presentados en
congresos nacionales e internacionales fueron producto de esas investigaciones y dieron lugar a recomendaciones
de avanzar en la dirección de materializar un marco de referencia suficientemente preciso para las aplicaciones
57
fcaglp.unlp.edu.ar
- 105 -
que se estaban desarrollando en el país y tan cercano como fuera posible al sistema global WGS 84, utilizado por
el GPS.
Con la ayuda de un proyecto científico denominado Central Andes Project (CAP), el IGM realizo tres
campañas de medición que dieron lugar a la red POSGAR.
Posteriormente, la Facultad de Ciencias Astronómicas y Geofísicas de la UNLP realizo el cálculo de las
observaciones que permitiera disponer de las nuevas coordenadas.
Como controles externos que permitieran estimar de una forma mas confiable la exactitud del marco de
referencia POSGAR 94, se usaron puntos comunes con el proyecto SIRGAS (Sistema de Referencia geocéntrico
para América del Sur) y, en menor medida, por el proyecto geodinámico SAGA (South American
Geodynamics Activities).
Tales comparaciones confirmaron el acuerdo interno de la red obteniendo mediante la compensación, pero
además mostraron que POSGAR 94 materializaba un sistema de referencia geocéntrico con una precisión mejor
que un metro.
En Mayo de 1997, mediante la Resolución 13/97, el IGM adoptó el marco de referencia POSGAR 94
como la materialización del sistema de referencia nacional en reemplazo de marco de referencia Campo
Inchauspe 1969.
En resumen, el proyecto POSGAR permitió contar con una red de control geodésico compatible con las
modernas tecnologías GIS y GPS, capaz de satisfacer las necesidades de la gran mayoría de los usuarios de
geoposicionamiento.
7.4.3.2.1.
POSGAR 94 y POSGAR 98
La respuesta a estas demandas fue el marco de referencia POSGAR 94. Este marco está materializado por
127 puntos separados por una distancia promedio de 130 km y con una cobertura bastante homogénea en todo el
territorio argentino. A su concreción contribuyeron varias instituciones, principalmente el IGM y el University
NAVSTAR Consortium (UNAVCO) en la etapa de medición y la Universidad Nacional de La Plata que realizó el
cálculo.
Las coordenadas finales fueron difundidas por el IGM a comienzos de 1995 e inmediatamente
comenzaron a ser utilizadas a pesar de la resolución de 13/97.
Poco antes el IGM había sido ratificado en su rol de autoridad geodésica y cartográfica mediante una
resolución del Poder Ejecutivo Nacional y el marco POSGAR 94 había recibido el aval del Subcomité de
Geodesia del Comité Nacional de La Unión Geodésica y Geofísica Internacional, a través del Grupo de Trabajo
de los Sistemas Geodésicos58.
Con posterioridad, el IGM y la Universidad Nacional de La Plata suscribieron un convenio para trabajar
en el perfeccionamiento de POSGAR 94, en el contexto del Proyecto SIRGAS. El resultado de esa cooperación
fue un marco de referencia más exacto y preciso, ajustado a los criterios impartidos por SIRGAS, al que se
denominó POSGAR 98, materializado por 136 puntos, 111 de los cuales son comunes con POSGAR 94.
Las coordenadas 94 y 98 difieren a causa de varios factores, principalmente porque materializan sistemas
de referencia diferentes y porque el cálculo del 98 fue más riguroso que el del 94. La realización del 94 59
materializa el sistema WGS84 a través de las coordenadas de 19 puntos pertenecientes al Central Andes Project
(CAP) 60 y un punto localizado en la Estación Astronómica de Río Grande, Tierra del Fuego (punto EARG).
Los puntos CAP se localizan principalmente en la región andina, en el oeste del país, y se extienden desde
el norte hasta aproximadamente la latitud de –42 º. Sus coordenadas, en el sistema ITRF92 y publicado en: Actas
de la 20ª Reunión Científica de Geofísica y Geodesia, Mendoza, Argentina, 25 al 29 de septiembre de 2000.
58
CNUGGI, 1999.
Usandivaras y otros, 1995
60
Kendrick y otros., 1999
59
- 106 -
Para la época 1993.2, obtenidas a través de una comunicación privada con R. Smalley (Memphis State
University, USA), fueron transformadas al sistema WGS84 e introducidas en la compensación final de la red con
errores a priori de aproximadamente 3 centímetros en las tres componentes.
Figura 7.14: Red de puntos POSGAR 94.
Con el propósito de proveer un punto de control en el extremo sur de la red se realizó una vinculación
entre el punto GPS EARG y la baliza DORIS que allí opera, distante pocos metros uno del otro.
- 107 -
Las coordenadas WGS84 de la baliza DORIS fueron obtenidas mediante una comunicación privada con
R. Pico (IGN, Francia) y las coordenadas del punto EARG surgidas de la vinculación fueron introducidas en la
compensación final también con errores a priori de 3 centímetros en las tres componentes.
El cálculo de la red se realizó calculando todas las líneas de base independientes, utilizando el programa
comercial GPPS (Ashtech Inc.). Los 660 vectores resultantes fueron luego compensados por mínimos cuadrados
según el método de variación de las coordenadas61.
El marco de referencia fue definido introduciendo en la compensación las coordenadas de los 20 puntos
de control como observaciones directas con los errores a priori ya señalados.
La realización de POSGAR 98 62 materializa el sistema ITRF 94 a través de once puntos SIRGAS63, diez
de ellos localizados en territorio argentino y el punto IGS de Santiago de Chile al cual la red está vinculada a
través de observaciones realizadas en 1993 por el proyecto CAP.
El cálculo fue realizado con el software científico Bernese GPS Software V4.064, empleando las mejores
efemérides precisas disponibles y procedimientos rigurosos para modelar las variaciones de los centros de fase de
las antenas, corregir el error troposférico y transformar las coordenadas de control de la época media SIRGAS a la
época de las observaciones POSGAR.
En menor medida también contribuyen a las diferencias 94-98 observaciones adicionales que se agregaron
en el cálculo del segundo, principalmente conexiones entre puntos POSGAR y puntos en territorio chileno
realizadas por el proyecto CAP, vinculaciones a cuatro puntos SIRGAS que no son coincidentes con puntos del 94
y observaciones realizadas por el IGM en la región de la Mesopotamia.
7.4.3.2.2.
LAS DIFERENCIAS 94-98 Y SUS CONSECUENCIAS
Las diferencias en las coordenadas geocéntricas tienen efecto principalmente sobre la cartografía ya que
producirán un desplazamiento en bloque de todo levantamiento georreferenciado a puntos 94. También las
diferencias en las coordenadas relativas (pares de puntos 94 comparados con sus análogos 98). Estas últimas se
traducirán principalmente en deformaciones de todo levantamiento geodésico vinculado a dos o más puntos de
control 94. Tales deformaciones serán o no tolerables dependiendo fundamentalmente de la exactitud pretendida
para el levantamiento y su extensión geográfica.
7.4.3.2.3.
DIFERENCIAS EN LA COORDENADAS GEOCÉNTRICAS
La figura 7.15 muestra las componentes norte, este y vertical de las diferencias en las coordenadas
geocéntricas de 109 puntos comunes. Los valores están en metros y en el sentido 94-98. Las medias y sus
respectivas desviaciones estándares son:
•
•
•
0.523 ± 0.094 m para la componente norte.
0.095 ± 0.062 m para la componente este.
0.190 ± 0.479 m para la vertical.
Las mayores discrepancias son de aproximadamente 0.8, 0.2 y 1.5 m respectivamente.
El comportamiento de las componentes horizontales es mucho más uniforme que el de la vertical.
También se observa que al sur de -42º las componentes norte y vertical exhiben una tendencia de crecimiento
aproximadamente lineal que se atribuye a inconsistencias entre las materializaciones del sistema WGS84 provista
por los veinte puntos CAP y la baliza DORIS.
61
Usandivaras y otros, 1992
Moirano y otros, 1998
63
SIRGAS Project Commitee, 1997
64
Rothacher y otros, 1998
62
- 108 -
Figura 7.15: diferencias 94-98 en las coordenadas geocéntricas (metros)
7.4.3.2.4.
DIFERENCIA EN LAS COORDENADAS RELATIVAS
Para realizar este análisis se consideraron todas las líneas de base que se forman uniendo cada uno de los
puntos con el vecino más cercano. Ello da lugar a 28 vectores cuya longitud está comprendida entre 0 y 100 km,
71 entre 100 y 200 y 10 entre 200 y 350. La figura 7.16 muestra las componentes norte, este y vertical de las
diferencias en las coordenadas relativas para las 109 líneas de base consideradas.
Los valores están en metros y en el sentido 94-98. Nuevamente el comportamiento más discordante lo
presenta la componente vertical, para la cual 87% de las discrepancias se hallan por debajo de 0.5 m,
extendiéndose las restantes hasta aproximadamente 1.1 m.
Las discrepancias horizontales son menores, encontrándose 95% de ellas por debajo de 0.2 m y no
excediéndose nunca el valor 0.3 m. Si se considera solo la longitud de la línea de base y no sus componentes
resultan que 81% de las discrepancias son menores que 1 ppm (parte por millón) y 92% menores que 3 ppm.
Entre el 8% que exceden 3 ppm se encuentran solamente líneas de base cortas, cuya longitud es menor que 20 km.
Figura 7.16: diferencias 94-98 en las coordenadas relativas entre pares de puntos (metros).
7.4.3.2.5.
INFLUENCIA DE LAS DIFERENCIAS SOBRE LEVANTAMIENTOS DE
DISTINTAS EXTENSIONES GEOGRÁFICAS
Para tal fin se consideraron cuatro redes geodésicas de alta precisión y distinta extensión geográfica que
poseen puntos comunes tanto con POSGAR 94 como POSGAR 98:
- 109 -
•
•
•
En el caso de la red SIRGAS, son once puntos distribuidos en todo el territorio argentino;
En el segundo, ocho puntos del Central Andes Project distribuidos entre aproximadamente –22 y
–36 grados de latitud y –63 y –68 grados de longitud;
En el tercero, 19 puntos de la red básica del proyecto PASMA distribuidos en las provincias de
Salta, Catamarca, La Rioja y San Juan; y en el cuarto, 4 puntos pertenecientes a la red de la
provincia del Neuquén.
En todos los casos el procedimiento consistió ajustar por mínimos cuadrados los parámetros de una
transformación de igualdad entre las distintas redes y los marcos 94 y 98. Se asume que los parámetros de la
transformación absorben las inconsistencias de origen, escala y orientación entre las dos redes consideradas
mientras que los residuos del ajuste ponen en evidencia sus distorsiones.
La figura 7.17 muestra la desviación estándar de tales residuos expresada en centímetros, discriminando la
componente vertical de las horizontales, para los cuatro casos considerados.
Figura 7.17: desviación estándar (centímetros) de los residuos de una transformación de igualdad entre distintas redes y los
marcos POSGAR 94 y 98; se indica también el cociente 94/98.
La figura 7.17 muestra que el acuerdo entre las cuatro redes consideradas y POSGAR 98 es excelente,
manteniéndose en todos los casos por debajo de 5 centímetros (±1σ), tanto para las componentes horizontales
como para la vertical.
Cuando nos remitimos a POSGAR 94 la situación empeora entre aproximadamente 4 y 10 veces para la
componente vertical, tal como lo mostraría el cociente 94/98 entre las desviaciones estándares de los residuos de
las respectivas transformaciones de igualdad. Para las componentes horizontales los residuos respecto de
POSGAR 94 empeoran en factores que aproximadamente van de 1 a 4,5, a medida que aumenta la extensión de la
red considerada.
7.4.3.3. CONCLUSIONES
El marco de referencia POSGAR 98 materializa el sistema terrestre internacional con una exactitud de
pocos centímetros en las tres componentes. Las diferencias con las coordenadas geocéntricas de POSGAR 94 se
mantienen por debajo de 1,5 metros en las tres coordenadas, discrepancia esta que no produce consecuencias
apreciables en la georreferenciación de levantamientos hasta la escala 1:5.000.
En cuanto a las diferencias en las coordenadas relativas, se observa una clara diferenciación entre lo que
ocurre con las componentes horizontales y la vertical como:
•
•
Mientras que las primeras reflejan que la realización del 94 es con respecto a la del 98 hasta 5
veces inferior en precisión,
La segunda muestra una degradación de hasta 10 veces.
- 110 -
Desde el punto de vista del control horizontal, POSGAR 94 es un marco apto para todo levantamiento
cuyas exigencias de precisión ronden los pocos centímetros en extensiones del tamaño de una provincia argentina.
POSGAR 98 asegura precisiones centimétricas aún en levantamientos muy extensos y es, desde todo punto de
vista, más apropiado para aquellos levantamientos que exijan control vertical a niveles centimétricos.
En términos de los estándares geodésicos actualmente vigentes para el posicionamiento con GPS podría
establecerse que POSGAR 98 puede servir de control para levantamientos que cumplan los estándares del tipo 0
hasta la exigencia B en las tres componentes, mientras que POSGAR 94 solo puede cumplir esa función hasta la
exigencia D en las componentes horizontales y E en la vertical. 65
7.4.3.4.
NUEVO MARCO DE REFERENCIA PARA LA REPUBLICA ARGENTINA
POSGAR 07 ha sido adoptado por disposición del Director del
Instituto Geográfico Nacional el 15 de mayo de 2009 como el nuevo
“Marco de Referencia Geodésico Nacional” y reemplaza al hasta entonces
vigente POSGAR 94.
Basado en ITRF 05 Época 2006.632 constituye la materialización sobre el territorio nacional del más
moderno sistema de referencia a nivel mundial compatible con el marco regional SIRGAS y responde a los más
estrictos estándares de precisión y ajuste en vigencia.
Incorpora las más importantes redes geodésicas en uso asegurando parámetros de transformación entre las
mismas y la nueva definición a fin de facilitar una georreferenciación unívoca en toda la República Argentina.
Utilizando como red de Orden cero al conjunto de estaciones permanentes GNSS de la Red RAMSAC (Red
Argentina de Monitoreo Satelital Contínuo) permite aprovechar íntegramente los datos de las mismas aplicados a
la nueva realización y define simultáneamente la Red Oficial GNSS.
POSGAR 07 fue medido sobre los puntos de la red POSGAR 94, incorporando más de 50 nuevos
que mejoran la geometría espacial de la red y optimizan los resultados del ajuste.
Considerando la incorporación de las demás redes para su integración al nuevo marco, el Instituto
Geográfico Militar midió, desde el año 2005 un total de 436 puntos en una significativa tarea que contó con la
colaboración de organismos estatales y provinciales, debiendo destacarse especialmente la activa participación del
Consejo Federal de Catastro.
El nuevo Marco fue calculado con el software científico de procesamiento y ajuste de redes
geodésicas GAMIT – GLOB K.
Características de POSGAR 07.
•
•
•
•
La medición se realizó desde junio del año 2005 hasta octubre de 2007.
180 puntos pasivos con coordenadas en un Marco de Referencia único y homogéneo.
436 puntos adicionales vinculados al nuevo Marco, para poder determinar la integración de las
redes provinciales.
El continuo procesamiento de las estaciones GPS permanentes a través del Centro Experimental
GMA, junto con los otros centros permitirá afianzar las coordenadas oficiales. 66
A partir de la nueva realización, el Instituto Geográfico Nacional satisface recomendaciones
internacionales y espera responder a los requerimientos de todos los usuarios estableciendo un Marco único y
65
66
Claudio Brunini, Juan Moirano (UNLP), Maria Mackern (IANIGLA)
Agrimensor Sergio Cimbaro
- 111 -
definitivo que satisface la totalidad de las necesidades de la geodesia en particular y de todas aquellas disciplinas
que se valen de su información para el desarrollo de sus tareas y aplicaciones científicas, prácticas y legales.
Figura 7.18: Marco Ramsac-POSGAR 07
- 112 -
CAPITULO 8
TRANSFORMACIÓN Y CONVERSIÓN DE COORDENADAS
Dentro del territorio de la República Argentina, se trabaja con dos sistemas bien diferenciados, uno es un
sistema Geodésico (Datum Local, Campo Inchauspe ‘69) y un sistema Absoluto (Datum Geocéntrico, WGS’84).
Figura 8.1: Transformación y Conversión de Coordenadas
Toda transformación se vale de parámetros, los cuales si estamos trabajando con los sistemas habituales
por lo general ya se encuentra determinados, sin embargo, es útil entender conceptualmente el problema de su
determinación, y comprender las limitaciones que se pueden llegar a presentar.
Por un lado, está la Trasformación de Coordenadas y por otro lado la Conversión de Coordenadas, lo cual
se representa de la siguiente manera:
•
Transformación de coordenadas, es cuando se pasan coordenadas de un Sistema de
Referencia a otro Sistema de Referencia. (Ej.: Transformar de WGS84 a Campo Inchauspe ´69
y de éste, a un sistema local o arbitrario).
•
Conversión de coordenadas, es cuando se pasan coordenadas dentro de un mismo Sistema
de Coordenadas. (Ej.: Convertir coordenadas polares a rectangulares y luego a Geodésicas o
Elipsoidales).
Tales operaciones se dividen en:
•
Coordenadas Elipsoidales a Coordenadas Cartesianas.
•
Coordenadas Cartesianas a Coordenadas Elipsoidales.
o
Método Iterativo
- 113 -
o
Método de Bowring (Simple)
•
Coordenadas Elipsoidales a planas (Gauss-Krüger).
•
Coordenadas planas (Gauss-Krüger) a Elipsoidales.
•
Transformaciones de altura.
Transformaciones de Datum:
•
Transformaciones de tres dimensiones.
( Transformación de 7 parámetros)
•
Transformaciones de dos dimensiones.
( Transformación de 4 parámetros)
•
Transformaciones de una dimensión.
( Transformación de 3 parámetros)
8.1. COORDENADAS ELIPSOIDALES A CARTESIANAS
Cuando hacemos referencia a coordenadas cartesianas, o rectangulares, nos estamos refiriendo a un punto
en el espacio que puede estar definido en diferentes sistemas de referencia, en este caso tomaremos el sistema
WGS 84, y sus parámetros. El punto queda definido por coordenadas X, Y, Z, asumiendo que el origen de éstas,
es el mismo que el del elipsoide de revolución.
En cuanto a coordenadas elipsoidales, hacemos siempre referencia a los datos que nos entrega el sistema
satelital con el que se esta midiendo.
Figura 8.2: Coordenadas Elipsoidales a Cartesianas
8.1.1.
CONVERSIÓN DE COORDENADAS ELIPSÓIDICAS (WGS ‘84) A CARTESIANAS
(WGS ‘84)
La relación entre las coordenadas están dada por:
- 114 -
x = ( N + h). cos ϕ . cos λ
y = ( N + h). cos ϕ . sin λ
((
)
)
z = 1 − e 2 .N + h . sin ϕ
Donde:
φ es Latitud Geodésica
λ es Longitud Geodésica
h altura elipsoidal
N es el radio de curvatura del primer vertical
El radio de curvatura puede ser obtenido por la siguiente fórmula:
a
N=
(1 − (e . sin ϕ ))
2
2
Valores:
a = 6.378.137 m
e 2 = 0,00669437999013
8.1.2.
TRANSFORMACIÓN DE COORDENADAS CARTESIANAS (WGS ‘84) A
CARTESIANAS (CAMPO INCHAUSPE ‘69)
X = x + 148
Y = y − 136
Z = z − 90
8.2. COORDENADAS CARTESIANAS A ELIPSOIDALES
La transformación de coordenadas elipsoidales a cartesianas no presenta ninguna dificultad, ahora para
realizar la transformación inversa tenemos dos métodos, uno iterativo de mayor complejidad pero resultados más
ajustados y otro simple, pero con algunos inconvenientes, como se ejemplifica a continuación.
8.2.1.
MÉTODO ITERATIVO
En primer lugar con las coordenadas X e Y podemos calcular el radio del paralelo como:
p=
(X
2
)
+ Y 2 = (N + h ). cos ϕ (1)
Luego con “p” podemos calcular la altura elipsoidal:
p
h =
− N
cos ϕ
(2)
Para calcular φ debemos realizar varios cálculos auxiliares, primero calculamos la primera relación de
excentricidad (e2).
e2 =
(a
2
− b2
a2
)
Sabiendo que:
- 115 -
(
(
))
Z = N + h − e 2 .N . sin ϕ
Podemos reescribirlo como:
N
Z = ( N + h).1 − e 2 .
. sin ϕ
N + h
Dividiendo esta expresión por la ecuación (1):
Z N
tan ϕ = .1 − e 2 .
p N + h
−1
(3)
Obteniendo así la Latitud (φ), de la que podemos conseguir la Longitud (λ) como:
tan λ =
Y
X
El problema es que para el cálculo de h y de φ las ecuaciones (2) y (3) dependen de h y de φ, es por ello
que la solución se encuentra iterativamente, con los pasos siguientes:
1. Calcular
p=
(X
2
+Y2
)
2. Calcular un valor aproximado φ0:
(
Z
tan ϕ 0 = . 1 − e 2
p
)
−1
3. Con el valor obtenido, calculamos un valor N0:
N0 =
(a . cos ϕ
2
a2
2
0
+ b 2 . sin 2 ϕ0
)
4. Calculamos la altura elipsoidal:
p
− N 0
h =
cos ϕ 0
5. Calculamos un valor estimativo para la latitud:
Z N 0
tan ϕ = .1 − e 2 .
p N 0 + h
−1
6. La condición para terminar la iteración se dará si φ = φ0, en caso contrario se toma φ0 = φ y se continúa
con el paso 3
7. De esta manera cuando φ = φ0, llegaremos a los valores de φ, λ, h.
- 116 -
Este método puede llegar a ser engorroso en cálculo, pero nos garantiza resultados ajustados. Existen
otros métodos de cálculo, no iterativo, para las transformaciones de X, Y, Z, a φ, λ, h.
8.2.2.
MÉTODO SIMPLE (NO ITERATIVO)
Según estudios realizados 67 no existe una discrepancia significativa entre los resultados obtenidos por el
proceso iterativo y este método, aun así sigue siendo poco popular, y maneja fórmulas que reaccionan
rápidamente ante un cambio mínimo en las variables. Lo que se propone a explicar las siguientes operaciones:
a) Debemos calcular la segunda relación de excentricidad e`2
e'2 =
(a
2
− b2
b2
)
b) Realizamos otro cálculo auxiliar usando (1), y los valores de semieje mayor y menor, respectivamente.
(Z .a )
( p.b )
θ = arctan
c) Luego calculamos la latitud:
(
(
)
)
Z + e'2 .b. sin 3 θ
(4)
2
3
p − e .a. cos θ
ϕ = arctan
d) Conocemos la longitud por medio de la expresión:
Y
X
λ = arctan
e) Por ultimo calculamos la altura elipsoidal
p
h =
− N
cos ϕ
(5)
Los cálculos realizados con este método no resultan tan precisos. Realizando un análisis de las fórmulas
empleadas podemos ver que la fórmula (5) tiene una variabilidad muy susceptible, es decir, una variación de
décima de segundo en la latitud (4) implica una tasa de cambio de ±1 metros en la altura elipsoidal. Esto se debe a
que en la fórmula (5), el coeficiente “p” representa cifras aproximadas de 105, mientras que el coseno de
cualquier ángulo siempre dará valores entre [-1,1], por lo que este cociente se obtienen resultados muy dispersos.
8.3.
COORDENADAS ELIPSOIDALES (WGS 84) A COORDENADAS PLANAS (Gauss
Krüger)
Para el mapeo de un punto con coordenadas elipsoidales φ, λ, en un punto y, x en el plano, se llevará a
cabo mediante la siguiente serie de expansión:
67
GPS theory and practice, Holfmann-Wellenhof
- 117 -
(
)
t
t
y = B(ϕ ) + .N . cos 2 ϕ .l 2 + .N . cos 4 ϕ . 5 − t 2 + 9η 2 + 4η 4 .l 4
2
24
(
)
t
6
2
4
2
2 2
6
+
.N . cos ϕ . 61 − 58t + t + 270η − 330t η .l
720
(
)
t
8
2
4
6 8
+
.N . cos ϕ . 1385 − 3111t + 543t − t .l + .........
40320
(
)
1
x = N . cos ϕ .1 + .N . cos 3 ϕ . 1 − t 2 + η 2 .13
6
1
5
2
4
2
2 2
5
+
.N . cos ϕ . 5 − 18t + t + 14η − 58t η .1
120
1
7
2
4
6
7
+
.N . cos ϕ . 61 − 479t + 179t − t .1 + .....
5040
(
)
(
)
De donde:
B (ϕ )
N=
Longitud de arco del meridiano
a2
(b .(b .(1 + η )
2
2
2
Radio de curvatura del primer
vertical
η 2 = e´2 . cos 2 ϕ
Cantidad auxiliar
t = tan ϕ
Cantidad auxiliar
l = λ − λ0
Diferencias en Longitudes
λ0
Longitud del meridiano central
e'2 =
(a
2
− b2 )
b2
Segunda relación de excentricidad
Tabla 8.1: Parámetros Elipsoidales
Por convención, primero se da “y” y luego “x”, ya que el par de coordenadas (y, x) corresponde a (φ,λ).
La longitud de arco del meridiano B (φ) es la distancia elipsoidal desde el ecuador hasta el punto que deseamos
representar en el mapa y puede ser calculada por la siguiente serie de expansión:
B (ϕ ) = α [ϕ + β .sen(2ϕ ) + γ .sen(4ϕ ) + δ .sen(6ϕ ) + ε .sen(8ϕ ) + ......]
De donde:
- 118 -
ELIPSOIDE WGS ´84
a +b 1 2 1 4
α =
.1 + .η + .η + .....
64
2 4
3 9
3
β = − .η 2 + .η 3 − .η 5 + .....
2 16 32
15 15
γ = .η 2 − .η 4 + ......
16 32
α = 6.367.449,1458 m
β = -2.518.827,92 x 10-3
γ = 2.643,54 x 10-6
δ = -3,45 x 10-9
ε = 5 x 10-12
35 105 5
δ = − .η 3 +
.η + .....
48 256
Tabla 8.2: Parámetros WGS 84
315 4
ε =
.η + ....
512
( a − b)
η =
( a + b)
8.4.
COORDENADAS PLANAS (GAUSS KRÜGER) A COORDENADAS ELIPSOIDALES
(WGS 84)
Para llevar un punto con coordenadas planas (y, x) a sus correspondientes coordenadas elipsoidales (φ,λ)
WGS 84, nos valemos de la siguiente serie de expresiones:
tf
. − 1 − η 2 f .x 2 +
)(
)
ϕ = ϕ f +
(
t f
4
24.N f
. 5 + 3t 2 f + 6η 2 f − 6t 2 f .η 2 f − 3η 4 f − 9t 2 f .η 4 f .x 4 +
2.N
(
f
)(
tf
6
720.N f
(
2
)
. − 61 − 90t 2 f − 45t 4 f − 107η 2 f + 162t 2 f .η 2 f + 45t 4 f .η 2 f .x 6 +
)(
)
tf
2
4
6
8
( (40320.N 8 ) ).(1385 + 3633t f + 4095t f + 1575t f ).x + .......
f
1
1
x +
3
( N f . cosϕ 0 ) 6 N f . cos ϕ f
. − 1 − 2t 2 f − η 2 f .x 3 +
1
. 5 + 28t 2 f + 24t 4 f + 6η 2 f + 8t 2 f .η 2 f .x 5 +
5
120 N f . cosϕ f
7
1
2
4
6
.
−
61
−
662
t
−
1320
t
−
720
t
f
f
f
.x ........
5040 N 7 f . cosϕ f
λ = λ 0 +
(
(
(
)(
)
)(
)(
)
)
- 119 -
De donde 68:
ϕ f = y '+ β '.sen( 2 y ' ) + γ '.sen(4 y ' ) + δ '.sen(6 y ' ) + ε '.sen(8 y ' ) + ......
a +b 1 2 1 4
.1 + .η + .η + .....
64
2 4
3 27 269 5
β ' = .η − .η 3 +
.η + .....
2 32 512
α'=
21 55
γ ' = .η 2 − .η 4 + ......
16 32
151 3 417 5
δ '=
.η −
.η + .....
96
128
1097 4
.η + ....
512
ε'=
y' =
y
α'
ELIPSOIDE WGS ´84
α’ = 6.367.449,1458 m
β’ = -2.518.826,58 x 10-3
γ’ = 3.700,95 x 10-6
δ’ = 7,45 x 10-9
ε’ = 17 x 10-12
Tabla 8.3: Elipsoide WGS ´84
8.5. TRANSFORMACIONES DE ALTURA. CONCEPTOS PRELIMINARES
El geoide es una superficie equipotencial o de nivel, del campo gravífico terrestre. Esta superficie incluye
todos los puntos, en los cuales el potencial gravitacional o la cantidad de trabajo necesario para superar la
aceleración de la gravedad son constantes. Por razones de conveniencia el nivel medio del mar (n.m.m.) o (m.s.l.)
es tomado como la superficie que mejor se aproxima al geoide. Por tanto, una definición alternativa del geoide es:
La superficie formada por la libre circulación de las aguas del mar sin el impedimento de las masas
terrestres y sin estar afectadas por el viento, la temperatura y las fuerzas externas.
El elipsoide, en cambio, es una superficie matemática simple que mejor se aproxima a la forma de la
Tierra.
En relación con las superficies descriptas, hay tres valores de la altitud de un punto simple sobre la Tierra
que pueden ser calculados:
•
•
•
Altura geoidal: es la distancia entre la superficie del geoide y la del elipsoide. Generalmente se
simboliza por la letra “N”.
Altura elipsoidal: es la distancia entre la superficie del elipsoide y la de la Tierra. Generalmente
se simboliza con la letra “h”.
Altura ortométrica: es la distancia vertical entre la superficie física de la Tierra y la superficie del
geoide. Esta distancia se mide a lo largo de la línea de plomada, la cual es la curva que es
tangencial a la dirección de la gravedad en cualquier punto. En muchos casos las alturas
ortométricas son también consideradas alturas sobre el nivel medio del mar. Generalmente se las
simboliza con la letra “H”.
68
Apuntes de clase año 2000, Armando del Bianco
Apuntes de clase, cátedra Geodesia I
- 120 -
Figura 8.3: Transformación de Altura
La relación entre estas tres superficies esta vinculada en la siguiente ecuación:
h = H + N 69
Esta fórmula es una aproximación pero es suficientemente efectiva a los fines prácticos. El ángulo “ε”
expresa la deflexión de la vertical entre la línea de plomada y la normal al elipsoide. Este ángulo por lo general no
excede los 30 segundos en la mayor parte de las áreas.
El posicionamiento con GPS, nos da como resultado coordenadas X, Y, Z, las cuales luego, con alguno de
los procesos como el iterativo o simple, podemos obtener la altura elipsoidal. Si además, uno de los dos términos
restantes en la ecuación fundamental es dato, el otro puede ser calculado, es decir, si el geoide es conocido la
altura ortométrica puede ser derivada y viceversa.
8.6. TRANSFORMACIONES DE DATUM
Un datum geodésico define la relación entre un sistema global y un sistema local de coordenadas en tres
dimensiones, o entre sistemas semejantes, por lo tanto, una transformación de datum relaciona un sistema de
cierto tipo de coordenadas con otro igual o distinto.
8.6.1.
CLASIFICACIÓN DE DATUM
8.6.1.1.
•
•
•
Conjunto de cantidades que sirven como base para el calculo de otras cantidades.
Las coordenadas que surgen de un ajuste de las mediciones (terrestres) comprenden el Datum.
El elipsoide es utilizado como superficie de referencia para referir las coordenadas.
8.6.1.2.
•
•
DATUM GEODÉSICO, CONCEPTOS PREVIOS.
DATUM GEODÉSICO VERTICAL.
La geodesia adopta el geoide (altura = 0) como superficie de referencia para definir las cotas.
El geoide es materializado a través de lecturas promediadas en un periodo extendido de tiempo sobre
mareógrafos.
69
Apuntes de clase año 2000, Armando del Bianco
Apuntes de clase, cátedra Geodesia I
- 121 -
•
•
•
Las alturas sobre el nivel medio del mar (n.m.m.) son materializadas en una serie de puntos fijos que
conforman la Red de Nivelación Nacional.
En nuestro país esta red esta conformada por aproximadamente 90.000 Km. de líneas de nivelación de
alta precisión.
El origen de alturas ha sido fijado en el mareógrafo de Mar del Plata.
8.6.1.3.
•
•
•
•
DATUM GEODÉSICO HORIZONTAL.
Necesidades de orientar el elipsoide respecto a la superficie física de la Tierra.
Parámetros:
o Las dimensiones del elipsoide (a, b)
o Las coordenadas geodésicas (φ, λ, h) de un punto fundamental.
o El acimut de una línea desde este punto a otro, y la desviación de la vertical ó ángulo entre la
perpendicular (coincidente con la dirección de la gravedad) y la perpendicular al elipsoide.
Multiplicidad de datum en la geodesia clásica.
Ajuste locales de un elipsoide al geoide. (Ej.: elipsoide internacional 1924, datum Campo Inchauspe 69.
Existen distintas fórmulas y métodos para realizar transformaciones. Las técnicas más comunes son en el
caso de coordenadas curvilíneas, las trasformaciones de Molodensky, y en el caso de coordenadas rectangulares
las transformaciones de 3, 4 ó 7 parámetros, dependiendo de la disponibilidad ó fiabilidad de los parámetros de
transformación que usamos.
Existen otro método que puede ser usado para realizar transformaciones de datum, este es la técnica de
ecuaciones de regresión múltiple (MRE).
8.6.2.
CLASIFICAR LAS TRANSFORMACIONES SEGÚN ESTAS AFECTEN A UNA, DOS O
TRES DIMENSIONES.
En Geodesia y Cartografía, es frecuente tener que resolver el problema de intercambio de coordenadas
procedentes de distintas referencias geodésicas y cartográficas para emplearlas en un mismo trabajo, y presentar
los resultados en alguna de esas referencias, o en otras nuevas. Las referencias cartográficas vienen determinadas
por los sistemas de proyección y representación utilizados, por lo que este es un problema que se estudia en
Cartografía. Sin embargo, el cambio de referencia geodésica es un problema puramente geodésico, que se suele
denominar como cambio de Datum.
La necesidad de este cambio proviene del hecho de que, en ocasiones es necesario tener que trabajar con
datos que toman como referencia datums geodésicos locales de distintas épocas, o incluso datums locales y
coexistentes, de distintas definición. También, la mencionada aparición del datum global obligo a toda la
comunidad geodésica internacional a estudiar el procedimiento sistemático de transformación de coordenadas
geodésicas del propio sistema local al sistema global.
La técnica para la resolución de ambos problemas al cambio de datum entre distintos sistemas locales, o
bien entre sistemas globales y locales.
Al problema de cambio de datum se resolvió con distintos tipos de transformación, de los que se pude
citar.
8.6.2.1.
TRANSFORMACIÓN DE HELMERT
Helmert estudio y determinó la relación existente entre las coordenadas de dos sistemas cartesianos
tridimensionales, cuyos orígenes no coinciden, sus ejes no son paralelos, y que utilizan distintas escalas para la
medida de sus coordenadas.
Sean dos sistemas cartesianos W y E como se muestra en la (figura 8.4). Unos es el W (OW, XW, YW, ZW),
y el denominado E (OE, XE, YE, ZE). El sistema E, se encuentra girado unos ángulos ex, ey, ez, con respecto al
sistema W. Además, el sistema E, no presenta la misma escala de medida que el W, la proporción existente entre
una medida de E y otra de W, es un factor de escala que se denomina K
- 122 -
ZE
eZ
P
ZW
VW
YE
q VE
eY
OE (0,0,0)
OE (X0,Y0,Z0)
V0
(0,0,0)
YW
OW
eX
XE
XW
Figura 8.4 Transformación de Helmert
Sean (X0, Y0, Z0) las coordenadas del origen OE referidas al sistema W. Las coordenadas de ambos
sistemas cartesianos pueden relacionarse a través de la expresión:
r
r r
VW = V0 + q
r
r
El vector q expresado en el sistema W, puede sustituirse en esta suma por el vector VE definido en el
sistema E. Para ello, este vector debe ser afectado del tensor de giro R correspondiente, y del factor K, que
relaciona las magnitudes de ambos sistemas
XW X 0
X E
r
r
r
VW = V0 + (1 + K ).R.VE ⇒ YW = Y0 + (1 + K ).R. YE (5.6.0)
ZW Z 0
Z E
La superposición del triedro O E X E Y E Z E con el O W X W Y W Z W, que se corresponde con el caso más
general, se logrará mediante los siguientes giros:
cos eZ
R = RZ (eZ ).RY (eY ).R X (e X ) = − sin eZ
0
0 cos eY
0. 0
1 sin eY
sin eZ
cos eZ
0
0 − sin eY 1
0
1
0 .0 cos e X
0 cos eY 0 − sin e X
0
sin e X
cos e X
Este producto, da como resultado:
cos eY
R = − cos eY
sin eY
sin e X
sin e
X
cos eZ cos e X
sin eZ .cos e X
sin eZ
cos eZ
cos e X
− cos e X
+ cos e X
cos eY
+ sin e X
− sin e X
sin e X
cos eZ
− sin e X
sin eY
sin eY
cos eY
sin eY
sin eY
cos eZ
sin eZ . →
cos eZ
sin eZ
- 123 -
Si las rotaciones eX, eY, eZ son pequeñas, se puede simplificar esta matriz R, eliminando términos
cuadráticos y superiores, aproximadamente el seno por el propio ángulo expresado en radianes, y
aproximadamente el coseno del ángulo a la unidad:
1
R = − eZ
eY
eZ
1
− eX
− eY
e X
1
Si se sustituye este valor de R en la expresión (5.6.0) se obtendrá como ecuación de transformación entre
los sistemas W y E la siguiente expresión:
1
XW X 0
Y = Y + (1 + K ). − e
Z
W 0
eY
ZW Z 0
8.6.2.2.
eZ
1
− eX
− eY X E
e X . YE (5.6.1)
1 Z E
TRANSFORMACIÓN DE AFINIDAD O DE 7 PARÁMETROS
Una vez planteada la ecuación de transformación de coordenadas (5.6.1), entre los dos sistemas W y E, su
resolución es inmediata si se conocen los valores de los siete parámetros necesarios que son:
x0, y0, z0, K, ex, ey, ez.
Así, dadas las coordenadas Xe, Ye, Ze, se obtendrán las Xw, Yw, Zw, o bien, dadas estas ultimas, se
obtendrán las primeras, invirtiendo la misma ecuación. Si por cualquier motivo, no se conocieran estos valores, o
su conocimiento no fuera lo suficientemente exacto, existe otro método de resolución indirecto, que necesita del
conocimiento previo de un conjunto de dobles coordenadas en ambos sistemas.
De esta manera, tomando datos el conjunto de dobles coordenadas, es posible el cálculo de esos siete
valores o parámetros. Este método de resolución, es el conocido como el método de afinidad o método de 7
parámetros.
Para cada conjunto de dobles coordenadas conocido, aplicado a la ecuación (5.6.1), aparecen 3
ecuaciones, luego, para poder calcular los 7 parámetros, serán necesarios al menos 3 vértices de coordenadas
conocidas en ambos sistemas, de forma que queden planteadas 7 ó más ecuaciones, en este caso nueve. Una vez
obtenidos estos parámetros, es posible resolver la ecuación (5.6.1) para transformar coordenadas, de un sistema a
otro, en un entorno próximo a la zona a la que pertenecen los vértices, cuyas dobles coordenadas se conocen. 70
8.7. ESTABLECIMIENTO DE UN SISTEMA LOCAL
Los sistemas de referencia locales, proceden de la geodesia clásica y están basados en observaciones con
instrumentos ópticos y gravimétricos. Estos sistemas, se estableces de la siguiente manera:
70
•
Un elipsoide de revolución, cuya forma se adapte lo mejor posible, en ese ámbito concreto, a la superficie
equipotencial o geoide.
•
Unas coordenadas de partida o datum, consistente en una pareja de valores de latitud y longitud,
obtenidas por observaciones astronómicas de precisión. En este datum, se apoya el elipsoide antes
mencionado, con el semieje menor paralelo al eje de la Tierra, de manera que la latitud y la longitud de
cualquier punto en las proximidades de la superficie de la Tierra, vienen dadas por las correspondientes
latitudes y longitudes del pie de la normal al elipsoide.
Apuntes de clase, cátedra Geodesia I
- 124 -
•
Una tercera coordenada llamada altura ortométrica, ya que las elevaciones sobre el elipsoide así
colocado no tienen significado tangible. Esta altura es la separación existente a lo largo de la vertical
física local, entre el punto en cuestión sobre el terreno y el geoide. Como ya sabemos esta altura se
obtiene por medio de observaciones gravimétricas y nivelación geométrica sobre el punto.
Los sistemas de referencias locales, entre ellos el sistema de referencia Campo Inchauspe del año 1969, se
materializan por una serie de vértices geodésicos extendidos a todo lo ancho de la región en cuestión. Entre si,
están vinculados por observaciones convencionales como pueden ser triangulaciones y nivelaciones, de forma que
se les somete a ajustes por el método de los mínimos cuadrados, para minimizar sus errores.
A partir de aquí se fueron extendiendo las redes en órdenes inferiores, a base de nuevas observaciones
convencionales y nuevos ajustes, de manera que los errores originarios se transmiten íntegramente a las redes
inferiores.
Por otro lado, la determinación de las coordenadas cartesianas geocéntricas de un vértice en un sistema
local, se pueden determinar con el conocimiento de la altura elipsoidal del punto en cuestión. La altura elipsoidal
se obtiene por suma de la altura ortométrica y la ondulación del geoide. Esta ondulación, solo es conocida en un
juego discreto de puntos de la superficie en la que se puede aplicar al sistema local. Pero puede contener errores
del orden del metro. 71
8.8. ESTABLECIMIENTO DE UN SISTEMA GLOBAL
Los sistemas de referencia globales hicieron su llegada con la aparición de los satélites artificiales. Estos
permiten medir con idénticos métodos de observación, y por lo tanto, niveles semejantes de exactitud, las tres
coordenadas en el espacio X, Y, Z de cualquier vértice.
Como elipsoide global se elige uno que se adapte lo mejor posible al geoide, pero esta vez a escala
planetaria. Pero además, este elipsoide puede ser colocado de manera que su centro coincida con el centro de
masa de la Tierra, y su semieje menor este orientado en la dirección del eje de rotación medio de la Tierra.
De esta manera posicionado hace que su meridiano 0° pase por Greenwich. La intersección de este plano
meridiano con el plano Ecuatorial será el eje X y el Y esta a 90° en sentido dextrógiro y en el mismo plano del
Ecuador.
De este modo se pueden obtener las coordenadas geocéntricas geodésicas de todo vértice cuyas
coordenadas se hayan obtenido por observaciones satelitales. Estas se calcularán como las correspondientes al pie
de la normal a su elipsoide que pasa por el punto en cuestión. Su tercera coordenada, la altura, viene dada ahora
por la separación entre el punto en cuestión y la superficie del elipsoide. Esta altura es la altura elipsoidal.
El sistema WGS 84 es un sistema global, aceptado convencionalmente tras la manipulación y el ajuste de
las observaciones a satélites, que se hicieron hasta ese año. Las coordenadas obtenidas por observaciones GPS,
VLBI, SLR, LLR, etc., son posteriormente ajustadas según el sistema y marco de referencia mundial ITRS e ITRF
a una época determinada.
8.9. PLANTEAMIENTO DEL PROBLEMA
Haciendo hincapié en la existencia de errores y ajustes de que adolece cada uno de los sistemas por
separado, sobre todo en el caso de los locales, y si a esto se añade el incorrecto y directo conocimiento de los 7
parámetros, que relacionan los dos sistemas cartesianos tridimensionales, local y global, obligadamente se ha de
descartar la solución analítica directa, general y única, para la transformación de coordenadas entre dos sistemas
propuestos por la ecuación (5.6.1). A pesar de estos errores y ajustes, las redes de un sistema local si guardan
coherencia entre si, aunque no con las de otro sistema exterior a él.
71
Geodesia y Topografía, José Manuel Millán Gamboa.
- 125 -
La solución al problema para aplicar el método de afinidad o de los 7 parámetros para la resolución. Este
método utiliza un juego de dobles coordenadas, de cada uno de los sistemas de referencia como ya se explico.
Con estas coordenadas es posible establecer una relación de afinidad entre estos sistemas. Así, se podrá calcular el
valor de los 7 parámetros para efectuar una transformación de coordenadas de la región. Dependiendo de la
cantidad de dobles coordenadas disponibles, y de la extensión de la región en que se encuentre distribuidas, se
obtendrán parámetros de transformación de mayor o menor calidad.
Para resolver el problema del cálculo de parámetros, aplicando el método de afinidad, se pueden
mencionar tres métodos. Estos son:
o
Modelo de 7 parámetros de Bursa-Wolf
o
Modelo de 3 parámetros
o
Modelo de 7 parámetros de Molodensky-Badekas
Además de ellos, existe un método para transformación de coordenadas por cambio de Datum que se sirve
de fórmulas dadas por Molodensky:
•
Modelo Abreviado y Estándar de Molodensky
8.9.1.
MODELO DE 7 PARÁMETROS DE BURSA-WOLF
Este método, se basa en una transformación de afinidad de 7 parámetros, a partir de la ecuación de
transformación (5.6.1) la ecuación de partida seria la siguiente:
X W ∆X
1
Y = ∆Y + (1 + K ). − e
W
Z
ZW ∆Z
eY
eZ
1
− eX
− eY X e
e X . Ye
1 Z e
Se trata de la misma expresión de la ecuación (5.6.1), en la que se ha sustituido la rotación x0, y0, z0 por
∆X, ∆Y, ∆Z, además de K, ex, ey y ez. Este modelo, presenta el inconveniente de que la inversión de la matriz en
el ajuste por mínimos cuadrados, presenta inestabilidad ya que bien todos los elementos de la matriz son de
órdenes próximos, los de la matriz de rotación pueden diferir en valores de entre 5 y 8 órdenes de magnitud.
8.9.2.
MODELO DE 3 PARÁMETROS
Este modelo, es una simplificación del modelo de 7 parámetros de Bursa-Wolf. Con el se obtienen buenos
resultados a la hora de obtener parámetros para extrapolar o interpolar entre varias zonas. Su ecuación es:
X W ∆X Xe
Y = ∆Y + Ye
W
ZW ∆Z Ze
8.9.3.
FÓRMULA ESTÁNDAR DE MOLODENSKY
Las formas de Molodensky permiten convertir directamente las coordenadas curvilíneas sin pasar por las
rectangulares.
En ellas interviene, además de las tres translaciones entre los orígenes, ∆X, ∆Y, ∆Z, el semieje mayor “a”,
el aplastamiento “f” del elipsoide asociado al sistema E y las diferencia con los del sistema W, por lo que seria:
- 126 -
∆a = a E − aW
∆f = f E − fW
Estas fórmulas toman en cuenta las translaciones del origen y las diferencias de tamaño y forma de los
elipsoides asociados a los sistemas E y W, pero ignoran las rotaciones entre los ejes y la diferencia de escala.
Cabe destacar que los sistemas E y W, pueden ser cualesquiera, siempre y cuando sus parámetros de
transformación se encuentren definidos. Los resultados de estas fórmulas ∆φ, ∆λ, ∆h, deben ser adicionadas a las
coordenadas del sistema inicial, para así obtener coordenadas en el sistema WGS 84, las cuales serian 72:
φ WGS 84 [grados, min, seg] = φ0 [grados, min, seg] + ∆φ [seg]
λ WGS 84 [grados, min, seg] = λ0 [grados, min, seg] + ∆λ [seg]
h WGS 84 [metros]
= h0 [metros] + ∆h [metros]
Para la transformación de un Datum geodésico local a WGS 84, definiendo luego cada termino de ellas.
R e 2 . sin ϕ . cos ϕ
( − ∆x. sin ϕ . cos λ ) − ( ∆y. sin ϕ . sin λ ) + (∆z. cos ϕ ) + ∆a. N
a
−1
∆ϕ " =
.[(RM + h ). sin l"]
+ ∆f . R . a + R . b
N
M b
a
∆λ " = [(− ∆x. sin λ ) + (∆y. cos λ )].[(RM + h ). cos ϕ . sin l"]
−1
a
∆ h = (∆ x. cosϕ . cos λ ) + (∆ y. cos ϕ . sin λ ) + (∆z. sin ϕ ) − ∆a.
RN
b
+ ∆f . .RN . sin 2 ϕ
a
72
Apuntes de clase año 2000, Armando del Bianco
Apuntes de clase, cátedra Geodesia I
Geodesia y Topografía, José Manuel Millán Gamboa
- 127 -
CAPITULO 9
POSICIONAMIENTOS GNSS
9.1. ASPECTOS DEL POSICIONAMIENTO
Cualquier forma de empleo del GNSS para el posicionamiento, adopta una de las dos características
que se mencionan a continuación, para cada uno de los tres aspectos siguientes:
CARACTERÍSTICAS
Código
Fase de la Portadora
ASPECTOS
Absoluto o Relativo
Estático o Cinemática
Tiempo Real o Postproceso
Tabla 9.1: Tipos de Posicionamientos
Así, por ejemplo, un determinado método de observación será el posicionamiento absoluto
cinemático en tiempo real, y otro, el posicionamiento absoluto estático con post-procesado. Cualquier
combinación, de cualquiera de las dos características de cada una de los tres aspectos, dará lugar a un método de
posicionamiento. Cada uno de ellos utilizará el observable de Código, la Fase de la Portadora o ambos. Aquellos
que utilizan la fase de la portadora necesitan de un periodo estático de inicialización para poder resolver la
ambigüedad inicial.
9.1.1.
EL POSICIONAMIENTO ABSOLUTO FRENTE AL RELATIVO
El posicionamiento Absoluto, también conocido con el nombre de Autónomo o Single Point
Positioning, determina las coordenadas de un receptor en un punto desconocido. Estas coordenadas se refieren al
sistema de referencia al que se este usando. Se emplea un único receptor. Este tipo de posicionamiento, trabaja
generalmente con Códigos C/A o P de la Portadora.
El posicionamiento Relativo, en vez de calcular la posición de un punto aislado sobre la Tierra, solo
con respecto a los satélites, emplea también otro vértice de coordenadas conocidas, de forma que las coordenadas
del primero se obtienen al aplicar un vector, denominado línea base, entre la estación de coordenadas conocidas y
la desconocida. La ventaja de este método con respecto al anterior, es que logran exactitudes mucho mas elevadas
debido a que la mayoría de los errores de observación GNSS son comunes a las estaciones conocidas y
desconocida, y así, es posible reducirlos en el procesado de los datos. Por esta razón, éste será el método que se
aplique a trabajos Geodésicos. Para ello, se necesita el uso de dos receptores y se realiza con la utilización, tanto
en Códigos, como de la Fase de la Portadora.
No hay que confundir el termino Posicionamiento Diferencial con el termino Posicionamiento
Relativo, aunque en ocasiones se emplean erróneamente como sinónimos. El posicionamiento Diferencial emplea
dos receptores, uno en una posición conocida y otro en una posición desconocida, cuyas coordenadas se quieren
determinar. Generalmente su tipo de observación es la del Código. Se diferencia del método Relativo, en que no
calcula un vector o línea base para el posicionamiento, sino que se sirve de correcciones, medidas en la posición
conocida, que se aplican a las medidas efectuadas por el receptor en la estación desconocida. Estas correcciones,
son ajustes que se deben efectuar a las pseudodistancias observadas, para que fuesen iguales a las
pseudodistancias calculadas, que se obtienen tomando como datos las coordenadas del punto conocido y las
posiciones de los satélites. Otro tipo de correcciones, menos usadas y menos precisas, consisten en comparar
directamente la posición observada, en el punto de estacionamiento del receptor de referencia, con las
coordenadas conocidas del mismo punto. Los dos tipos de correcciones se transmiten entre receptores, vía radio o
satélite, según el formato 104-RTCM (es un protocolo de serie utilizado para la radiodifusión para correcciones
a las pseudodistancias de las estaciones de referencia GPS diferencial)
- 128 -
9.1.2.
EL POSICIONAMIENTO ESTÁTICO FRENTE AL CINEMÁTICO
El posicionamiento estático implica que el receptor que este realizando las observaciones se
encuentre estático en el punto cuyas coordenadas se quieren obtener. Este método puede emplear uno o dos
receptores, y se pueden utilizar tanto en los Códigos como la Fase de la Portadora.
El posicionamiento cinemático es un tipo de posicionamiento en el que, generalmente, un receptor
se mueve mientras realiza la observación. Este método puede emplear uno o dos receptores, y se pueden emplear
tanto en Códigos como la Fase de la Portadora. Es menos preciso que el estático, y se ve afectado por más
obstáculos, aunque es más productivo.
9.1.3.
EL POSICIONAMIENTO EN TIEMPO REAL FRENTE AL POST-PROCESO
El posicionamiento en Tiempo Real, las posiciones de calculan casi instantáneamente sobre el
terreno, ya que el receptor resuelve los algoritmos necesarios casi a la vez que realiza las observaciones. Emplea
uno o dos receptores. Puede trabajar tanto en Código como la Fase de la Portadora.
El posicionamiento con Post-proceso realiza la observación grabando los datos obtenidos, de forma
que posteriormente a la observación, estos datos son tratados con un determinado tipo de software y combinados
con datos externos, como pueden ser las efemérides mas precisas de los satélites. Se emplean uno o dos
receptores, y se emplean tanto en Código como Fase de la Portadora. Presenta la gran ventaja, sobre el
posicionamiento en Tiempo Real, de poder controlar el algoritmo de cálculo para desechar errores en la
observación, y para explotar al máximo toda la información con la que se cuenta. Este posicionamiento es,
generalmente, mas preciso que el de Tiempo Real.
9.2. TIPOS DE POSICIONAMIENTO
La figura 9.1 detalla a través de un organigrama los principales tipos de posicionamiento,
clasificados según el rubro que le corresponde, para luego ser detallados uno por uno.
9.2.1.
ABSOLUTO
9.2.1.1.
ESTÁTICO EN TIEMPO REAL
En este caso se emplea un único receptor de forma estática en un punto cuyas coordenadas se quieren
saber. Se pueden trabajar, tanto en los Códigos como las Fases, de forma conjunta o separada. No es necesario
que el receptor grabe datos. El principio de funcionamiento de este sistema de posicionamiento, debido a que el
estacionamiento es estático facilita el posicionamiento. Este sistema no es muy empleado, ya que para el caso de
querer obtener las coordenadas de un punto, cualquier otro método es más ventajoso. Un típico ejemplo de este
caso es el uso del navegador satelital portátil.
Con éste sistema, las precisiones que se consiguen actualmente, hablando exclusivamente del sistema
GPS, con la Disponibilidad Selectiva desactivada, varían de un receptor a otro, pero de forma general se estipula
una exactitud de unos 15 metros en el 95% de los casos para Código C/A (SPS) y 1 metro para Código P (PPS).
En el caso de operar con la Fase de la Portadora, al ser en tiempo real, hay que tener en cuenta que en
el caso de que el receptor sea simple frecuencia, para tener solución habrá que esperar a que resuelva las
ambigüedades, lo que puede llevar varios minutos, lo mismo se aplica al caso de que se produzcan perdidas de
ciclos.
- 129 -
TIPOS DE
POSICIONAMIENTO
ABSOLUTO
ESTÁTICO
TIEMPO
REAL
POST
PROCESO
RELATIVO
CINEMÁTICO
TIEMPO
REAL
POST
PROCESO
ESTÁTICO
CINEMÁTICO
TIEMPO
REAL
POST
PROCESO
CONVENCIONAL
RÁPIDO
POST
PROCESO
TIEMPO
REAL
REOCUPACIÓN
STOP
and
GO
PSEUDO
CINEMÁTICO
Figura 9.1: Tipos de Posicionamientos
- 130 -
Figura 9.2: Posicionamientos Absoluto
Si el receptor es doble frecuencia, este tiempo de cálculo de ambigüedades suele ser menor de 5
segundos. Las exactitudes son mayores, que en el caso de operar con Códigos, llegando a dar precisiones mejores
de 20 cm.
9.2.1.2.
ESTÁTICO CON POST-PROCESO
En este caso se emplea un único receptor de forma estática en un vértice cuyas coordenadas se
quieren conocer. El sistema puede trabajar tanto con Código como con Fase, de forma conjunta o separada. Es
necesario que el receptor tenga capacidad para grabar los datos. El principio de funcionamiento de este sistema de
posicionamiento es similar al explicado en el apartado anterior, pero la solución del problema se obtendrá
posteriormente al utilizar los datos grabados y combinarlos con efemérides precisas difundidas por el segmento de
control, normalmente unos 15 días después de la observación. Estas efemérides precisas dan datos precisos de las
orbitas de los satélites observados, con lo que la posición obtenida mejora sensiblemente. Este sistema no es muy
empleado, ya que para el caso de querer obtener las coordenadas de un vértice existen métodos más ventajosos.
Un típico ejemplo de este caso es el de un profesional que quiere obtener las coordenadas de un vértice, y
solo posee un receptor aunque de buenas prestaciones. Aunque no es necesario, es conveniente que el receptor sea
doble frecuencia, y posea un buen número de canales de seguimiento. Siempre debe ser capaz de grabar los datos
observados. El individuo debe disponer de un software para procesar los datos observados, combinándolos con las
efemérides precisas proporcionadas por el segmento de control.
Figura 9.3: Absoluto: Estático Post-Proceso
9.2.1.3.
CINEMÁTICO EN TIEMPO REAL
En este caso se emplea un único receptor en movimiento, de forma que proporciona en tiempo real,
información de la posición, velocidad y tiempo. En la mayoría de los casos trabaja solamente con los Códigos, y
no es necesario que el receptor grabe datos. Este sistema es muy empleado en la confección de track (rutas de
navegación). Las precisiones obtenidas con este método son muy similares a las expresadas para el caso del
posicionamiento absoluto estático en tiempo real. Un típico ejemplo de este caso es un navegante, conductor, etc.,
- 131 -
que quiere conocer su posición y velocidad de forma continúa. Se emplea un receptor que únicamente realiza
observaciones de Códigos.
Figura 9.4: Absoluto: Cinemático tiempo real
9.2.1.4.
CINEMÁTICO CON POST-PROCESO
En este caso se emplea un único receptor en movimiento que tiene capacidad para grabar datos de
observación de Código o de observación de Código y Fase. La solución del problema se obtendrá, posteriormente,
al utilizar los datos grabados y combinarlos con efemérides precisas difundidas por el segmento de control. Este
sistema prácticamente no se emplea, ya que para obtener ventaja del sistema, se utilizará el procedimiento
relativo.
Un posible ejemplo de este caso, aunque remoto, seria el de querer realizar un levantamiento taquimetrito,
aunque existen métodos muchos mas ventajosos y precisos para este fin.
9.2.2.
RELATIVOS
9.2.2.1.
ESTÁTICO EN TIEMPO REAL
En este caso se utilizan dos receptores estáticos en puntos del terreno enlazados por radio, de forma
que ambos realizan observaciones simultáneas a los mismos satélites, tanto de Código como de Fase. Uno de los
receptores realiza las funciones de estación de referencia, cuyas coordenadas son conocidas, y el otro, es la
receptor móvil cuyas coordenadas se quieren conocer. El método calcula el vector, o línea base, que une los dos
puntos. El receptor móvil ha de tener capacidad para resolver el algoritmo del método relativo, y tendrá que hacer
el cálculo del vector en tiempo real, puesto que es el que va a recibir, vía radio, los datos de la estación de
referencia. En este tipo de observaciones se deben realizar las mismas consideraciones que para el tipo de
posicionamiento absoluto estático en tiempo real, en cuanto al cálculo de ambigüedades iniciales cuando se
emplea la Fase.
9.2.2.2.
ESTÁTICO CON POST-PROCESO
Existen dos métodos que emplean esta técnica para el posicionamiento. Son el método estático
Convencional y el estático Rápido.
Errores que elimina:
•
Disponibilidad Selectiva (SA)
•
Retardo Ionosférico.
•
Retardo Troposférico.
•
Error en las Efemérides.
•
Error reloj satélite
- 132 -
9.2.2.2.1.
ESTÁTICO CONVENCIONAL
En este caso se emplean dos receptores de forma estática, uno de ellos se colocará en la estación de
referencia, y el otro en el receptor móvil. El método consiste en la determinación del vector que une estas dos
estaciones en las que se efectúan observaciones simultáneas. Como ya se ha mencionado, a este vector se le
conoce como línea base (base line)
Los receptores, en este caso, deben ofrecer buenas prestaciones, permitiendo las observaciones tanto
en Código, como de Código y Fase, y ser doble frecuencia, con un número suficiente de canales de seguimiento.
Aunque son preferibles los receptores doble frecuencia, también se pueden emplear simple frecuencia. Al ser un
método con post-proceso, puede resolver muchas mas combinaciones de observables que en el método
cinemática, y no se ve limitado a la resolución de ambigüedades, en tiempo casi real
Figura 9.5 Relativo: Estático Convencional
Para su mayor desempeño, es recomendable que la observación simultanea de los dos receptores, sea al
menos de unas 2 horas. La razón de ello es el permitir el aprovechamiento del cambio en la geometría que los
satélites trazan sobre el espacio. Este cambio en la geometría facilita la resolución de la ambigüedad. El receptor
debe ser capaz de grabar las observaciones. Una vez efectuada la observación, se combinan los datos obtenidos en
las dos estaciones, junto con los datos de efemérides precisas. Para ello, se debe contar con una estación de trabajo
que soporte el software adecuado para procesar las observaciones. De este modo se obtiene la línea base, que
ajustada a las coordenadas de la estación de referencia, permite conocer con gran exactitud las coordenadas del
receptor móvil.
El alcance de la exactitud en el empleo del GNSS estático con post-proceso, o estático convencional, varía
dependiendo de:
•
Los parámetros seguidos en la observación y en el procesado
•
Las longitudes de las líneas bases medidas
•
Los receptores empleados.
NOTA: Método estándar para distancias superiores a 20 Km.
Las aplicaciones para este método son las siguientes:
•
Redes geodésicas (Nacionales e Internacionales)
•
Control Geodésico.
•
Estudio de movimiento de placas.
- 133 -
•
Control de deformaciones en diques y estructuras.
Se emplean técnicas de proceso sofisticadas que tratan los errores de manera especial, de forma que se
logran exactitudes milimétricas.
Ventajas:
•
Más preciso, eficiente y económico que los métodos topográficos tradicionales.
o
Sustituye al método clásico de triangulación.
9.2.2.2.2.
ESTÁTICO RÁPIDO
Existe una variante de la técnica relativa estática con post-proceso, que es el posicionamiento
denominado Estático Rápido.
Este termino fue introducido para describir los procedimientos de posicionamiento GPS estáticos, que
requieren minutos en lugar de horas de observación. La técnica se basa en la resolución de las ambigüedades de la
portadora en muy cortos periodos de tiempo, son el beneficio del cambio en la geometría de los satélites con el
tiempo. Para ello, utiliza métodos sofisticados de procesos, e información adicional obtenida a base de
informaciones, no solo del Código C/A, sino también del Código P, o de la redundancia de satélites, de 7 u 8, en
vez de los 4 mínimos. Así, se pueden reducir los periodos de observación, de forma que solo es necesario
estacionar 5 o 10 minutos por estación, manteniendo los mismos órdenes de precisión que para el método relativo
estático.
Figura 9.6: Relativo: Estático Rápido
Los trabajos en estáticos rápidos, se deben realizar con líneas base cortas, entre 10 a 20 km. Así, se logran
exactitudes centimétricas. La máscara de elevación que se introduce es de 15º de elevación y las épocas de 15
segundos (intervalo de registro de datos, varia de 1 segundo hasta 60 segundos).
Mecanismo de Estacionamiento
•
Estacionamiento de una estación de referencia temporal: observa y almacena datos de todos los
satélites a la vista continuamente.
- 134 -
•
El Receptor móvil se estaciona en el punto que se pretende levantar.
•
Estaremos en el punto el tiempo que nos indique las tablas en función del Nº de satélites, Distancia
a la referencia, GDOP, etc.
•
Los tiempos breves de observación posibilitan una precisión de 5 a 10 mm. ± 1 ppm. (EMC)
•
Los tiempos de observación son: de 5 a 10 minutos para distancias inferiores a 5 Km.
Aplicaciones:
•
Levantamientos de control, densificación.
•
Sustituye al método clásico de poligonación.
•
Determinación de puntos de control, ingeniería civil, bases de replanteo.
•
Levantamiento de detalles y deslindes.
•
Cualquier trabajo que requiera la determinación rápida de un elevado número de puntos.
•
Apoyos fotogramétricos.
Ventajas:
•
Sencillo, rápido y eficiente comparado con los métodos clásicos
•
No requiere mantener el contacto con los satélites entre estaciones.
•
Se apaga y se lleva al siguiente punto.
•
Reducido consumo de energía.
•
Ideal para un control local.
•
No existe transferencia de errores ya que cada punto se mide independientemente.
Los inconvenientes es no se puede utilizar en zonas de población, cerca de edificios, debido al efecto
multipath y en general en zonas que nos impidan recibir cuatro o más satélites. Este método de posicionamiento
se puede utilizar simultáneamente con el estático, realizando la triangulación con método estático y la
densificación con el estático rápido.
Tipo de
Posicionamiento
ESTÁTICO
RÁPIDO
ESTÁTICO
Números de
Satélites
GDOP ≤ 8
4 o más
4 o más
5 o más
4 o más
4 o más
Longitud de la
Línea Base
hasta 5 Km.
de 5 a 10 Km.
de 10 a 15 Km.
de 15 a 30 Km.
más de 30 Km.
Tiempo de
Observación
DIA
de 5 a 10 min.
de 10 a 20 min.
de 20 a 30 min.
de 1 a 2 hs.
mayor a 2 hs.
Tiempo de
Observación
NOCHE
5 min.
de 5 a 10 min.
de 5 a 20 min.
1 hora
2 horas
Tabla 9.2: Alcances en los tipos de posicionamientos 73
9.2.2.2.3.
REOCUPACIÓN
Algunas marcas de equipos tienen la posibilidad de llevar a cabo mediciones sobre el terreno con este
método, que presenta la particularidad de que las condiciones no son las mas adecuadas, posteriormente el
software es el encargado de procesar estos tipos de datos, como es en particular el SKI-Pro de Leica
Se utiliza cuando la situación para la observación no es del todo eficaz, es decir, no tenemos 4 satélites
como mínimo, o bien, el GDOP es superior al permitido 8.
73
GPS y Aplicaciones en la Topografía, Leica.
- 135 -
Este método es muy útil cuando el método estático rápido no es posible realizarlo. Se realiza de la misma
manera que el estático rápido pero estacionando en el punto dos veces, con una diferencia en el estacionamiento
en el punto de una hora. La razón de hacerlo con una hora de diferencia es por que de esta manera aseguramos
que vamos a recibir al menos 3 satélites distintos. Lo que hace el software es sumar la información de una y otra
observación y lo calcula como si fuese una sola observación.
Alta precisión en dos pasos.
•
Estación de referencia temporal: rastrea continuamente.
•
Receptor móvil: ocupa cada punto por breves minutos.
•
Reocupación después de al menos 1 hora de espera.
•
El software combina las observaciones.
•
Precisión de una línea -base: 5 a 10 mm. + 1 ppm. (EMC)
Aplicaciones:
•
Las mismas que el Estático Rápido.
Ventajas:
•
La precisión depende menos de la constelación de satélites que en el modo estático rápido.
•
Buenos resultados con solo 3 Satélites.
•
Método ideal cuando las condiciones dadas no son adecuadas para el estático rápido o cuando por
obstrucciones se reduce el número de satélites disponibles.
9.2.2.3.
CINEMÁTICO EN TIEMPO REAL
Esta técnica se conoce con el nombre de Real Time Kinematic (RTK). Se han de emplear dos receptores.
El receptor de la estación de referencia o base se encuentra en forma estática en un punto de coordenadas
conocidas, y el receptor remoto se encuentra en movimiento, pasando por aquellos puntos cuyas coordenadas se
quieren determinar. Al ser un tiempo real, el receptor remoto realiza el cálculo de la línea base con sus
observaciones y con las observaciones del receptor base, que son enviadas al receptor remoto, vía radio, en la
banda UHF o VHF.
Figura 9.7: Relativo: RTK
- 136 -
Las situaciones recibidas en el receptor remoto se suelen grabar en el receptor para su posterior descarga.
Esto no implica un post-proceso, ya que lo único que se trata, es de actuar como almacén de coordenadas que
luego será utilizado, por ejemplo, para su edición grafica. Se pueden emplear, tanto el observable de Código,
como el de Fase.
En el caso de la Fase, hay que tener en cuenta la resolución de las ambigüedades. Si hay necesidad de que
el sistema proporcione coordenadas lo más continuadamente posible, se tendrá que emplear receptores doble
frecuencia para que se produzca, de forma casi inmediata, la resolución de las ambigüedades.
La transmisión radio de datos, entre base y el receptor móvil, se deberá realizar con una frecuencia de 0,5
a 5 segundos. Una ventaja importante de este método, es que si se dota al receptor remoto de una consola de
control y visualización, se pueden replantear puntos sobre el terreno, es decir, materializar en el terreno puntos de
los que se conocen sus coordenadas. El RTK, es muy utilizado en topografía debido a su alta productividad, ya
que se pueden obtener coordenadas con gran precisión, y en poco tiempo.
9.2.2.4.
CINEMÁTICO CON POST-PROCESO
Existen técnicas de trabajo con posicionamientos relativos que adoptan nombres propios y que son
difíciles de clasificar por encontrarse en la frontera entre lo que seria un procedimiento relativo estático y uno
relativo cinemática, ya que emplean receptores móviles, realizando paradas mas o menos cortas en los vértices a
determinar. Además, aunque su empleo habitual es un post-proceso, también es posible utilizar técnicas de tiempo
real. Estos procedimientos, reciben el nombre de posicionamiento Semi-cinemático o Stop and Go, y
posicionamiento Pseudocinemático.
9.2.2.4.1.
STOP AND GO
En esta técnica se han de emplear dos receptores simple frecuencia que deben tener capacidad de
grabación de datos, con un número suficiente de canales de seguimiento. Uno de ellos será la estación de
referencia, y el otro el receptor móvil, que ira moviéndose entre los puntos cuyas coordenadas se quieren conocer.
Esta técnica se conoce como cinemática, porque entre parada y parada, debe continuar realizando el seguimiento
de los satélites (Go), aunque realmente el dato que interesa, son las coordenadas en el punto de parada (Stop). El
tiempo de parada en cada estación cuyas coordenadas se quieren determinar, es del orden de 1 minuto, o incluso
menos. Las precisiones que se obtienen son del orden de 10 cm.
Para empezar el trabajo se debe resolver la ambigüedad inicial. Para ello, se debe emplear una línea base
conocida cuya longitud sea de pocos metros, y que se empleará como dato. En los puntos que la determinan, se
sitúan las antenas de ambos receptores, observando los satélites unos pocos minutos. Luego, se intercambian las
antenas y se observan los satélites otros pocos minutos. Finalmente, se colocan en la posición inicial, y se puede
inicializar el trabajo. La más versátil y reciente técnica para resolver la ambigüedad inicial, es la técnica
denominada On The Fly, que se realiza con el receptor móvil en funcionamiento, y ya en movimiento.
Una vez resuelta la ambigüedad, el receptor se ha trasladado de punto en punto, recogiendo observables
de fase en cada uno de ellos durante, aproximadamente 1 minuto. Es muy importante que entre parada y parada, el
receptor remoto continúe el seguimiento de los mismos satélites, así como los de la estación de referencia. De esta
manera, la ambigüedad resulta al comienzo es válida para todas las observaciones.
El método normal de empleo de esta técnica es con post-proceso. Una vez efectuada la observación, se
combinan los datos obtenidos en las dos estaciones, empleando si se desea datos de efemérides precisas. Esto se
lleva acabo en una estación de trabajo que soporte el software adecuado para procesar las observaciones. Esta
técnica se puede realizar, también, en tiempo real con el correspondiente equipo de comunicación VHF o UHF y
modem, de forma que se transmiten, de estación de referencia a remota, el vector de posición entre ellas,
calculado a partir de las medidas de Fase.
9.2.2.4.2.
PSEUDO-CINEMÁTICO
Este método se podría asimilar a una combinación entre la técnica de posicionamiento relativo estático y
el Semi-cinemático. Con dos receptores simple frecuencia, que deben tener capacidad de grabación de datos y con
- 137 -
CAPITULO 10
un número suficiente de canales de seguimiento, se establece una estación de referencia y otra remota. Esta
última, se ira desplazando por aquellos vértices en los que se quieren determinar coordenadas, de aquí su similitud
con la técnica semi-cinemática. Pero se diferencia de ella, en que se deben ocupar, durante 5 minutos, dos veces la
misma estación, con 10 minutos de observación, se alcanza la precisión de una observación única mucho mas
larga. Este procedimiento, tiene la ventaja sobre el semi-cinemático, de que no hace falta realizar el seguimiento
de satélites entre parada y parada. Los receptores se pueden incluso apagar.
El posicionamiento pseudo-cinemático no ha tenido demasiada difusión en su empleo, ya que presenta la
restricción logística de tener que volver al mismo punto dos veces con 1 hora de espaciamiento. De ahí, que para
el mismo tipo de trabajo, los procedimientos relativo estático y estático rápido resulten mejores elecciones.
- 138 -
USO COMBINADO DE LOS SISTEMAS GPS Y GLONASS.
10.1.
INTRODUCCIÓN.
Los Sistemas GPS y GLONASS son sistemas autónomos, es decir, cada uno tiene su propio sistema de
referencia y su propia escala de tiempo. Usan diferentes sistemas de referencia para expresar las posiciones de sus
satélites, y por lo tanto, para determinar las posiciones de los usuarios.
Para poder utilizar los dos Sistemas de Posicionamiento por Satélite, GPS y GLONASS, es decir, recibir
señales de los satélites de ambas constelaciones, es necesario establecer la relación entre los sistemas de tiempo y
sistemas de referencia utilizados por ambos. El Sistema GPS utiliza el sistema de referencia WGS-84, mientras
que el Sistema GLONASS utiliza el PZ-90. Los parámetros que definen los dos sistemas de referencia son
significativamente diferentes.
Analizando las pseudodistancias medidas a los satélites GLONASS y GPS, los errores cometidos viene
expresado por el valor que son consentidos en la URE (User Range Error). Este error contempla los errores al
predecir las efemérides, inestabilidades en el vehículo espacial, relojes de los satélites, efectos ionosféricas y
troposféricos, efecto multipath, ruido de la señal, y para GPS, la Disponibilidad Selectiva (SA). Todos estos
errores en su conjunto se recogen en el valor σURE. El URE se define como la diferencia entre la pseudodistancia
y la distancia calculada a partir de las posiciones dadas de los satélites, teniendo en cuenta sólo los errores de reloj
y de deriva.
Para GLONASS, el valor del URE es de σURE ≈ 10 m, mientras que para GPS sin SA es de σURE ≈ 7 m,
y con SA es de σURE ≈ 25 m. La diferencia en los valores de URE de 7 a 10 m entre los Sistemas GPS y
GLONASS, es atribuida principalmente a la falta de corrección del efecto ionosférico en GLONASS.
10.2.
ESTUDIOS REALIZADOS SOBRE LA UTILIZACIÓN DE AMBOS SISTEMAS Y
SU USO COMBINADO.
El Laboratorio Lincoln de Massachusetts hizo un estudio de las precisiones que ofrecen ambos sistemas
de posicionamiento y las precisiones de su uso combinado, analizando las precisiones obtenidas en
posicionamiento absoluto usando en código C/A durante periodos de 24 h. La precisión con GLONASS, obtenida
en estas pruebas es mejor que los niveles garantizados por el Gobierno Ruso. Además, la precisión con
GLONASS es mejor que la obtenida con GPS debido a que la Disponibilidad Selectiva está activada. Sin
embargo, si la SA estuviera desactivada, la precisión con GPS sería mejor que con GLONASS. Los siguientes
valores muestran los resultados obtenidos por el Laboratorio Lincoln en una de las pruebas realizadas para la
obtención de posiciones absolutas utilizando la constelación GLONASS, la constelación GPS y su uso combinado
GPS/GLONASS:
10.2.1. POSICIONES ESTIMADAS CON GLONASS:
Error Horizontal (m)
Error Vertical (m)
10 (50%)
21.2 (95%)
26.8 (99%)
14.6 (50%)
39.1 (95%)
46.3 (99%)
Tabla 10.1: Posiciones GLONASS
10.2.2. POSICIONES ESTIMADAS CON GPS:
Error Horizontal (m)
26.2 (50%)
48.4 (95%)
- 139 -
Error Vertical (m)
62.9 (99%)
26.7 (50%)
81.7 (95%)
105.1 (99%)
Tabla 10.2: Posiciones GPS
10.2.3. POSICIONES ESTIMADAS CON LA COMBINACIÓN GPS/GLONASS:
Error Horizontal (m)
Error Vertical (m)
6.5 (50%)
14.9 (95%)
25.8 (99%)
16.7 (50%)
41.8 (95%)
49.5 (99%)
Tabla 10.3: Posiciones GPS/GLONASS
Con la disponibilidad de receptores GPS/GLONASS, el usuario puede tener acceso a un sistema
combinado de hasta 48 satélites (con las dos constelaciones completas). Con todos estos satélites, los trabajos en
desfiladeros y otras localizaciones de visibilidad restringida, tales como áreas boscosas, etc., es mejorada debido a
la posibilidad de mayor información con más satélites. Además, una mayor constelación de satélites también
mejora la ejecución del posicionamiento diferencial en tiempo real, ya que, el tiempo menor de toma de datos, con
respecto a un posicionamiento diferencial calculado en post-proceso, se ve compensado por la obtención de una
mayor información de más satélites.
Pero eso no es todo, además el tiempo de inicialización para alcanzar precisiones de nivel centimétrico
mejora en un factor de 3 a 6 veces con una constelación de 48 satélites.
El posicionamiento posee una integridad mayor. Para un nivel de confianza de 99.9% el posicionamiento
con GPS requiere una recepción continua de 6 o más satélites en su constelación de 24 satélites.
En cambio usando GPS/GLONASS, para el mismo nivel de confianza, se requiere una recepción continua
de 7 satélites de los 48 de la combinación. Las operaciones de código diferencial vienen a ser más simples.
Debido a que no existe una degradación deliberada de la precisión, el trabajo con GLONASS diferencial
requiere mucha menor cantidad de correcciones.
Es posible la detección del 100% de los fallos, tanto en disponibilidad de los satélites, como en la calidad
de la información que transmiten, gracias a la existencia de los RAIM (Receiver Autonomous Integrity
Monitoring), que son receptores autónomos de seguimiento íntegro que utilizan unos algoritmos que detectan
anomalías en la transmisión de datos, aún figurando un buen estado de salud en los mensajes de navegación y
almanaques.
Las principales ventajas del uso combinado GPS/GLONASS son la mejora en la geometría de los satélites
y la moderación de la Disponibilidad Selectiva. Las posiciones se estiman usando los parámetros de
transformación entre el sistema PZ-90 y el WGS-84.
10.3.
OBTENCIÓN DE LOS PARÁMETROS DE TRANSFORMACIÓN ENTRE PZ-90 Y
WGS-84.
Los parámetros que definen los dos sistemas de referencia PZ-90 y WGS-84 son significativamente
diferentes.
Para poder utilizar el sistema combinado GPS/GLONASS es necesario el conocimiento de las posiciones
de todos los satélites utilizados, satélites GPS y GLONASS, en el mismo sistema de referencia. Para ello, lo que
se realiza es el paso de las posiciones de todos los satélites GLONASS al sistema de referencia WGS-84, y
- 140 -
así trabajar con la constelación de los 48 satélites en un mismo sistema de referencia. Además de la unificación
del sistema de referencia, es necesario establecer también la relación entre los dos sistemas o escalas de tiempo
utilizados. Esto se resuelve por medio de la información contenida en los mensajes de navegación de cada uno de
los sistemas, donde aparecen las diferencias entre los tiempos GPS o tiempos GLONASS con respecto al Tiempo
Universal Coordinado.
Para obtener las efemérides de los satélites GLONASS en el sistema WGS-84 es necesario conocer los
parámetros de transformación de PZ-90 a WGS-84, para lo cual se necesita un cierto número de satélites
GLONASS con coordenadas en ambos sistemas. Con estos satélites se calculan los parámetros de transformación
utilizando la técnica de mínimos cuadrados, y se aplican al resto de satélites.
Las coordenadas de los satélites GLONASS en PZ-90 aparecen en el mensaje de navegación que emiten
los satélites. La estimación de las posiciones de los satélites GLONASS en WGS-84 es realizada por una serie de
estaciones de seguimiento que utilizan técnicas de medición láser, radar y ópticas para la determinación de las
órbitas. Estas estaciones están localizadas por todo el mundo:
•
Técnicas láser: Estados Unidos, Alemania, Austria, Finlandia, Latvia, Rusia, Ucrania, Uzbekistan,
Japón y Australia.
•
Técnicas rádar: Westford y Kwajalein.
•
Técnicas ópticas: Estaciones MOTIFF en Hawai y Estaciones GEODSS en la Isla Diego García.
La determinación de las órbitas se realiza utilizando un software de alta precisión que usa la técnica de
mínimos cuadrados. Las órbitas son calculadas usando nueve días de datos de seguimiento. Una vez que los
parámetros orbitales son estimados, el programa genera vectores de estado en intervalos de 30 minutos,
correspondientes a las épocas de las efemérides GLONASS transmitidas. La calidad de la determinación de las
órbitas tras el cálculo se estima por un error RMS de la posición de los satélites del orden de 11 m.
Figura 10.1: Estaciones de seguimiento para el cálculo de las órbitas de los satélites GLONASS en WGS-84.74
En el Laboratorio Lincoln de Massachusetts se calculan los parámetros de transformación entre ambos
sistemas. Se utiliza una red de receptores de referencia distribuidos por toda la superficie de la Tierra que
determinan las coordenadas de los satélites GLONASS en ambos sistemas. Así se obtienen las posiciones de los
satélites GLONASS en el sistema PZ-90 a partir de las efemérides transmitidas, y las coordenadas de los satélites
GLONASS en WGS-84 a partir de la red de estaciones de seguimiento láser y sistemas radar. Se estiman los
parámetros de la transformación por MMCC, obteniendo como resultado de la transformación una rotación
alrededor del eje Z y una traslación a lo largo del eje Y. Los parámetros de la transformación resultantes se
muestran en la siguiente figura:
74
Langley, R., Review and Update of GPS and GLONASS, in GPS World.
- 141 -
Figura 10.2. Transformación de coordenadas de PZ-90 a WGS-84.
Una vez que tenemos los parámetros de la transformación del sistema PZ-90 al sistema WGS-84 ya
podemos tener las efemérides de todos los satélites GLONASS en el sistema WGS-84, y por lo tanto podremos
utilizar el sistema combinado GPS/GLONASS.
La mayor causa de error en la determinación de los parámetros de transformación se encuentra en las
efemérides transmitidas. Para facilitar el uso combinado GPS/GLONASS, las autoridades Rusas pretenden incluir
en los nuevos mensajes de navegación de los satélites de la constelación GLONASS-M, las diferencias entre los
dos sistemas de tiempos y posiciones de referencia.
10.4.
VENTAJAS DEL SISTEMA GPS + GLONASS
Las principales ventajas que GPS + GLONASS presenta son: Disponibilidad, Confiabilidad y Precisión.
10.4.1. DISPONIBILIDAD
Los 24 satélites que se determinó para GPS fue pensado para tener cobertura mundial durante las 24 horas
del día, pero sin considerar las obstrucciones presentes en todas las actividades cercanas a los bancos de
explotación; y de otros obstáculos tales como edificios, cerros, árboles, etc. Esta situación es especialmente
complicada en las minas, ya que en muchos casos son profundos socavones en la que la cobertura GPS es
extremadamente limitada, por lo que puede ser usada sólo en algunas horas del día y en zonas muy abiertas de la
depresión.
Esto ha sido verificado en muchas oportunidades por intentos de medir en diferentes minas, donde
generalmente en el fondo se puede obtener 5 satélites, que es el mínimo necesario para obtener precisión
centimétrica en tiempo real. Pero al acercarse a los bancos de explotación fácilmente se baja a 4 o 3 satélites,
insuficientes para las aplicaciones mineras.
Es fácil suponer que al agregar los satélites GLONASS, duplicando así la cantidad de satélites GPS,
sucederá que donde haya 5 satélites GPS se tendrá 10 satélites GPS + GLONASS y donde no se pueda medir
porque apenas hay solo 3 ó 4 satélites GPS habrá de 6 a 8 satélites GPS + GLONASS, lo que permite obtener
precisión centimétrica.
10.4.2. CONFIABILIDAD
El departamento de transporte de los Estados Unidos llegó a la conclusión que el sistema GPS por sí solo
no satisface los requerimientos para un Sistema Primario de Navegación Aérea. Pero GPS + GLONASS si
- 142 -
entregaría una solución aceptable, la cual debe cumplir con la disponibilidad de al menos 6 satélites visibles
durante el 99.999% del tiempo, que es el mínimo necesario para identificar y corregir cualquier anomalía que se
produzca en algún satélite y así poder tener un posicionamiento altamente confiable.
10.4.3. PRECISIÓN
GLONASS presenta la ventaja de no estar afecto a la degradación de sus señales, como lo es la
Disponibilidad Selectiva en el caso de GPS. De esta manera la precisión absoluta GPS se ve restringida a 100
metros con un 95% de probabilidad, mientras que GPS + GLONASS entrega una precisión absoluta de 16 metros.
El ISS (Institute of Satellite Navigation) ha trabajado construyendo receptores con GLONASS y GPS a
partir de 1982.
Con la disponibilidad de receptores GPS / GLONASS, el usuario puede tener acceso a un sistema
combinado de hasta 48 satélites (con la dos constelaciones completas). Con todos estos satélites, los trabajos en
desfiladeros y otras localizaciones de visibilidad restringida, tales como áreas boscosas, etc., es mejorada debido a
la posibilidad de mayor información de más satélites. Además, una mayor constelación de satélites también
mejora la ejecución del posicionamiento diferencial en tiempo real, ya que, el tiempo menor de toma de datos, con
respecto a un posicionamiento diferencial calculado en post-proceso, se ve compensado por la obtención de una
mayor información de más satélites.
Al aplicar el método diferencial, la precisión de GPS es similar a la de GPS + GLONASS en áreas
abiertas, pero cuando se debe trabajar en áreas obstruidas como en la minería, GPS difícilmente puede mantener
las precisiones, ya que con menos de 5 satélites no puede entregar precisión centimétrica, mientras que en tal
situación habrá 6 a 8 satélites GPS + GLONASS que podrán seguir proporcionando, precisión centimétrica.
10.5.
GPS vs GLONASS
En la tabla 10.4, podemos ver las diferencias entre las dos constelaciones, la estructura de la señal y las
especificaciones del GPS y GLONASS para un posicionamiento preciso. Como se observará, los dos sistemas son
muy similares.
CONSTELACIÓN
Número de Satélites
Número de Planos Orbitales
Inclinación de la órbita (en grados)
Radio orbital (en Km.)
Periodo (hh:mm)
Retransmisión del seguimiento
Separación de los planos orbitales
Señal portadora (Mhz)
Código
Frecuencia del código (MHz)
Sistema de coordenadas
Horizontal (mts)
Vertical (mts)
GPS
24
6
55º
26560
11:58
Día sideral
60º
L1 : 1575.42
L2 : 1227.60
CDMA
Código C/A en L1
Código P en L1 y
L2
Código C/A : 1.023
Código P : 10.23
WGS84
10-25
140
GLONASS
24
3
65.8º
25510
11:16
8 días siderales
120º
L1 : 1602+0.5625n
L2 : 1246+0.4375n
FDMA
Código C/A en L1
Código P en L1 y L2
Código C/A : 0.511
Código P : 5.11
PZ90
50-70
150
Tabla 10.4: Comparación GPS-GLONASS
Se declara la Capacidad Inicial Operativa en 1993 (IOC), y se declara la Plena Capacidad Operativa en
1995 (FOC) con 24 satélites operativos en órbita. Estos satélites no han tenido ningún problema y han superado
su vida útil planeada de 5 años, llegando incluso a los 11 años. Ellos continúan lanzándose periódicamente, y cada
vez con nuevas características que robustecen al sistema GPS.
- 143 -
Sin embargo, GLONASS ha tenido problemas importantes con la prematura pérdida de servicio de sus
satélites, lográndose recuperar financieramente y colocando a la actualidad 27 satélites.
10.6.
USO DEL GPS Y EL GLONASS CONJUNTAMENTE
Los receptores duales GPS-GLONASS ofrecen mejor prestación que los receptores individuales de cada
sistema. Con los dos sistemas integrados se tiene una mayor rapidez de recepción de señales debido al mayor
número de satélites en un tiempo dado y en cualquier parte. Asimismo, se tiene una mayor cobertura en ambientes
de muchas obstrucciones.
El GLONASS con tres planos orbitales, el GPS con seis, y la diferente inclinación de sus planos orbitales,
ofrecen una disponibilidad complementaria en función de latitud. Con el GLONASS se favorecen las latitudes
extremas debido al alto grado de inclinación de sus planos orbitales, mientras que con el GPS se favorecen las
latitudes medias.
Figura 10.3: Visibilidad Satélites GPS/GLONASS
Lo cual haciendo la comparativa de solamente la constelación GPS, se aprecia la gran diferencia de
recepción de satélites.
Figura 10.4: Visibilidad Satélites GPS
Un receptor con capacidad de operar con los dos sistemas ofrecerá lo mejor de ambos. En adición al
aumento del número de satélites disponibles, y a la mejora de la geometría.
En tanto que existe un notable incremento en la calidad de la incertidumbre de la posición de los satélites
(PDOP), garantizando una geometría mas equilibrada durante el periodo de observación. La figura 10.5 muestra
la gran diferencia que existe en el valor de PDOP entre GNSS y GPS, cabe mencionar que GPS solamente tiene
en la actualidad 32 satélites visibles, mientras que GNSS son 63 satélites visibles.
- 144 -
Figura 10.5: PDOP GPS (32 satélites)
CAPITULO 11
La figura 10.6 se muestra la mejora en el porcentaje de PDOP al comparar el GPS con GPS-GLONASS.
Además, los valores de PDOP en latitudes altas, es decir por encima de 55º, la mejora es de un nivel del 30 %. En
tanto que en latitudes medias, las mejoras son por encima del 15 %, lo que demuestra las importantes mejoras en
tiempo real de los usuarios del GNSS, que se puede esperar en comparación con el GPS en tiempo real.
Figura 10.6: Mejoramiento de PDOP.
PRACTICAS DE CAMPO
11.1.
INTRODUCCIÓN
En esta sección se abordará exclusivamente la parte práctica, en donde se podrán sacar conclusiones de
las ventajas o desventajas que proporciona esta nueva versión de equipos satelitales, para el sistema GNSS.
En ella se podrá ver como se trabajó, que técnicas se utilizaron, como se trataron los resultados, y como
fueron comparados para llegar a un ideal acorde a nuestras necesidades, como profesional de la Agrimensura.
El presente trabajo de campo se realizo en el año 2011, por un lapso de 3 meses, lo que llevó a realizar
innumerables tomas de datos, a saber:
- 145 -
•
Se hizo un relevamiento planimétrico del sistema de apoyo que pertenece a la Universidad
Nacional de Córdoba.
•
En forma paralela con un equipo GPS, se midieron puntos en la modalidad planialtimétrica
concernientes a una red de nivelación de la Localidad de Agua de Oro, en la provincia de Córdoba.
11.2.
EQUIPAMIENTO UTILIZADO
En todo tiempo para realizar las prácticas de comparación entre el Sistema de Posicionamiento Global
(GPS) y el Sistema de Navegación Global por Satélite (GNSS), se utilizó un Equipo Sokkia GRX1, doble
constelación, simple frecuencia, mas su controladora SHC25 de Sokkia.
Figura 11.1: Equipos de trabajo
11.2.1.
ESPECIFICACIONES DEL GRX1
GPS + GLONASS + L1 + L2 + L2C + RTK + GSM + NTRIP.
RTK UHF DIGITAL + RTK GSM/GPRS + NTRIP ACTIVADO
+ GLONASS ACTIVADO SIN LÍMITE GEOGRÁFICO DE FUNCIONAMIENTO
•
Sumamente confiables y fáciles de operar.
•
Receptor escalable por módulos desde GPS L1 a GNSS L1/L2 RTK UHF y GSM.
•
Receptor GNSS (GPS + GLONASS) de alto rendimiento, compacto y totalmente integrado.
•
72 canales. Y 28 canales para L1
•
Soporta las señales GPS L2C.
•
Precisión en estático PP ± (3 + 0.5 ppm) mm.
•
Precisión en cinemático PP ± (10 + 1 ppm) mm.
•
Precisión en cinemático RTK ± (10 + 1 ppm) mm.
•
Resistentes a golpes y caídas.
•
Protección IP67, totalmente protegido contra agua y polvo.
•
Rango de temperatura de -40°C a 65°C.
•
Memoria en tarjetas SD y SDHC de alta capacidad.
•
Vectores RTK de más de 40 Km. (GSM/GPRS).
•
Conexión serial y a USB mediante adaptador.
•
Conexión inalámbrica Bluetooth.
•
Módem digital UHF para RTK de alto rendimiento hasta 8 Km. (sin obstrucciones base - móvil).
- 146 -
11.3.
•
Módem digital GSM/GPRS para RTK de alto rendimiento por Internet a más de 40 Km. (sin
importar obstrucciones base - móvil).
•
Correcciones NTRIP.
•
Baterías recargables de Litio-ión sin efecto memoria y gran capacidad de carga.
•
Autonomía de más de 7.5 horas con batería interna.
•
Peso 1.1 Kg.
•
Ideales para levantamientos, densificación de redes y replanteo RTK.
•
Mensajes verbales indicadores que facilitan la tarea.
•
Varios modelos de controladoras súper resistentes con software exclusivo Spectrum Survey Field
con múltiples funciones para el trabajo de campo.
•
Potente software Spectrum Survey Office para el procesamiento y ajuste de vectores. 75
SOFTWARE UTILIZADOS
Para el procesamiento de datos se utilizo el software oficial de la marca SOKKIA, el SPECTRUM
SURVEY OFFICE y TOPCON TOOLS pertenecientes a la misma Empresa.
Figura 11.2: Software de trabajo
También se utilizaron diversos software para contrastar resultados, como son el GNSS SOLUTIONS de la
firma Ashtech y el SKI PRO de Leica.
Cabe aclarar que solamente en el trabajo de medición del sistema de apoyo de Ciudad Universitaria el
modo de operar, tanto en Estático, Stop and Go y Dinámico, fue en modo Absoluto o Autónomo, ya que luego se
haría la vinculación a la Estación Permanente UCOR perteneciente a la Facultad de Ciencias Exactas Físicas y
Naturales, que en la tabla 11.1 se muestran los datos y características, en tanto que las demás experiencias se
trabajo en modo Relativo:
ESTACIÓN PERMANENTE UCOR
Localización: Cordoba – Argentina
Latitud: 31º26’05,85595” S
Longitud: 64º11’36,62015” O
Alt. Heli.: 462,779 m
Coordenadas en Sistema POSGAR 07 (Época 2006.632)
Receptor SOKKIA GSR2700 RSX GNSS
Antena: Novatel SK702-GG (GNSS) Pinwheel
Altura Antena (al ARP): 0.000 m
Altura ARP Centro de Fase L1/L2: 0.065 m
75
mertind.com/argentina
- 147 -
Ángulo de mascara GNSS: 5º
Ángulo de mascara RTK: 10º
Sesiones: 1s, 5s y 15s (2hs) / 15s (24 hs)
Formato de archivos: RINEX .zip
Corrección NTRIP activa:
Host: 200.16.19.17
Puerto 2101
Tabla 11.1: Datos Estación Permanente UCOR
11.4.
SISTEMA DE APOYO UNIVERDIDAD NACIONAL DE CORDOBA
05 de Octubre de 2011
El trabajo de la re-medición del sistema de apoyo nombrado, se empezó a trabajar el día 05-10-11 cuando
por primera vez se desembalaba el equipo involucrado en este trabajo, ya que se había adquirido hacia muy poco
tiempo, simplemente se midió en Estático Rápido de 4 puntos solamente, de los cuales ya se tenia conocimientos
de sus valores, porque como se nombro, los valores de todos los puntos se obtuvieron de años anteriores.
Tipo de Levantamiento
Periodo de medición
Intervalo de medición
Números de Épocas
Altura instrumental
Semana/día GPS
Estático Rápido
10 minutos
Cada 1 segundo
600
1.56 metros
1656/278
Tabla 11.2: Configuración de Estático Rápido
Las sesiones fueron de 10 minutos solamente, con la sola intención de saber como era su funcionamiento
e ir aprendiendo paulatinamente su modalidad de trabajo, funciones, tanto del equipo en si como de su
controladora que ofrece diversas funciones para su control y estado del equipo.
En particular se hizo el levantamiento de datos de los puntos C, B, L (punto pato) y un punto fijo aleatorio
(pf3), los resultados fueron en particular buenos ya que por ser la primera vez que se utilizaba el equipo era una
satisfacción personal poder haber medido ya esos puntos.
Los resultados fueron que dos puntos dieron fijos (color verde) y dos flotantes (color rojo), en referencia a
estos últimos fue mas bien lógico ese resultado, ya que se hizo intencionalmente colocar el equipo en una
situación desfavorable en relación a la obstrucción que ofrecían esos puntos, o comúnmente llamado “no había un
buen cielo”, debido a que el “punto pato” está prácticamente tapado de vegetación, y el punto fijo (pf3) está
ubicado en la cercanía de edificios. A continuación se muestra los resultados obtenidos en el software de postproceso en forma de vectores.
- 148 -
Figura 11.3: Vectores del día 05-10-11
La tabla 11.4 muestra los resultados obtenidos.
GNSS
PUNTOS
VECTORES
Ell.Height Std Dev Std Dev e
(m)
n (m)
(m)
462,779
0,000
0,000
447.747
0,002
0,002
452.269
0,003
0,003
462,494
0,060
0,188
459,156
0,035
0,129
Std Dev
u (m)
0,000
0,005
0,007
0,083
0,051
Std Dev
Hz (m)
0,000
0,003
0,004
0,197
0,134
Horizontal
Precisión (m)
Vertical
Precisión
(m)
dN (m)
dE (m)
dHt (m)
Solution
Type
0,003
0,004
0,197
0,134
0,005
0,007
0,083
0,051
75,503
-180,48
84,147
160,428
-110,95
-181,85
460,20
475,36
-15,129
-10,609
-0,285
-3,623
Fixed,L1
Fixed,L1
Float,L1
Float,L1
Name
Latitude
Longitude
UCOR
b
c1
l
pf3
31°26'05,85595S
31°26'03.37006S
31°26'11.65447S
31°26'03,28642S
31°26'00,81553S
64°11'36,62015W
64°11'40.79015W
64°11'43.58007W
64°11'19,16269W
64°11'18,55773W
Point
From
Point To
UCOR
UCOR
UCOR
UCOR
b
c1
l
pf3
Tabla 11.4: Valores de medición día 05-10-11 (GNSS)
El análisis continuo haciendo la comparativa con el sistema GPS, esto se hizo de la siguiente manera, el
software de post-proceso nos brinda la posibilidad de poder procesar los datos con GPS solamente, anulado los
satélites GLONASS, de esta manera podemos obtener los valores de la medición como si hubiésemos trabajado
con un GPS común y corriente de esos que nos ofrece el mercado actual.
- 149 -
UCOR
Figura 11.4: Ciudad Universitaria de la Ciudad de Córdoba
- 150 -
Lo que no se puede hacer es procesar los datos solamente de GLONASS, esto es, porque el software
trabaja haciendo una transformación de los valores del sistema de referencia de GLONASS, que es el PZ 90, al
WGS 84 que pertenece a GPS, entonces ahí comienza el trabajo de procesamiento de datos, lo cual nos
imposibilita procesar directamente los datos GLONASS solamente debido a que no tenemos los parámetros de PZ
90 en nuestra región.
La tabla 11.5 muestra los valores obtenidos procesando los datos con GPS solamente.
GPS
PUNTOS
VECTORES
Name
WGS84 Latitude
WGS84
WGS84 Longitude Ell.Height
(m)
UCOR
b
c1
l
pf3
31°26'05,85595S
31°26'03.37006S
31°26'11.65447S
31°26'03,28642S
31°26'00,81553S
64°11'36,62015W
64°11'40.79015W
64°11'43.58007W
64°11'19,16269W
64°11'18,55773W
Point
From
Point To
UCOR
UCOR
UCOR
UCOR
b
c1
l
pf3
Std Dev n
(m)
Std Dev e
(m)
Std Dev
u (m)
Std Dev
Hz (m)
462,779
447.747
452.269
462,494
459,156
0,000
0,002
0,003
0,060
0,035
0,000
0,002
0,003
0,188
0,129
0,000
0,005
0,007
0,083
0,051
0,000
0,003
0,004
0,197
0,134
Horizontal
Precisión (m)
Vertical
Precisión
(m)
dN (m)
dE (m)
dHt (m)
Solution
Type
0,003
0,004
0,197
0,134
0,005
0,007
0,083
0,051
75,503
-180,480
84,147
160,428
-110,95
-181,85
460,20
475,36
-15,129
-10,609
-0,285
-3,623
Fixed,L1
Fixed,L1
Float,L1
Float,L1
Tabla 11.4: Valores de medición día 05-10-11 (GPS)
Figura 11.5: Punto L (Punto Pato)
Figura 11.6: Punto pf3
- 151 -
Al analizar ambas tablas se llega a la conclusión que el utilizar GNSS y GPS con éste equipo se obtiene el
mismo resultado, lo cual, genera el interrogante de que ¿Por qué no mejoro en nada al utilizar otra constelación
mas?, sabiendo que los satélites GLONASS nos ofrecen mejor geometría satelital, quizás se podría responder
diciendo que por tanta dificultad que existe en esos puntos, no hay manera de que sean medidos, o quizás la
configuración de los satélites para esa hora no era la apropiada, o simplemente que al ser la primera vez quizás
cometí un error grosero.
Las imágenes 11.5 y 11.6 que se muestran a continuación, muestran de las dificultades de las que se
habla, siendo la primer imagen para el punto L (punto pato) y la segunda para el punto fijo 3 (pf3).
12 de Octubre de 2011
Segunda campaña, también se practicó lo mismo que se venia haciendo, solamente que se utilizaron otros
puntos pertenecientes al sistema de apoyo, antes mencionado.
En esta ocasión se intento trabajar en la modalidad Stop and Go, lo cual generó muchas dudas a la hora de
configurar el equipo ya que nadie sabía el como operarlos, debido a que nadie antes los había utilizado.
Lógicamente no dio los resultados esperados, quedando todos los puntos flotantes, a continuación se demuestra
los vectores procesados.
Esto impidió que se generara ningún informe de resultados ya que no servia para el fin que se estaba
buscando.
Figura 11.7: Vectores del día 12-10-11
19 de Octubre de 2011
Para el tercer intento, fue mas frustrante que el anterior ya que se logró sacar lo equipos después de un
cumplir un largo protocolo que requiere el retirarlos de la facultad estos equipos, pero en este caso lo que fallo fue
el tiempo, ya que ese día en la ciudad de Córdoba había mal tiempo, estas lluvias impidieron que se practicara lo
mismo que se venia haciendo hasta el momento.
22 de Octubre de 2011
Este día fue nuevamente intento fallido por mal estado del tiempo, pero con la convicción que ya la
modalidad Stop and Go se había aprendido a usarla, por lo cual no fue en vano la presencia de ese día.
- 152 -
25 de Octubre de 2011
Después de tantos intentos frustrados este fue la excepción, se pudo realizar los levantamientos de once
puntos en la modalidad Estático Rápido, configurados de la siguiente manera
Tipo de Levantamiento
Periodo de medición
Intervalo de medición
Números de Épocas
Altura instrumental
Semana/día GPS
Estático Rápido
15 minutos
Cada 1 segundo
900
1.56 metros
1659/298
Tabla 11.5: Configuración de Estático Rápido
Los resultados fueron bastante satisfactorios, de los 11 puntos, 4 quedaron flotantes y las causas de este
fallo fue por dos motivos, dos de los puntos (41 y 110) fue debido a las condiciones desfavorables (Figura 11.8 y
11.9) que presentaban los puntos, prácticamente bajo árboles estaban, y contando la época del año, los mismos
presentaban gran cantidad de hojas dejando prácticamente nulo la visión a los satélites, es decir, un cielo muy
malo.
Los otros dos puntos (2 y 3) la única razón fue que la Estación Permanente justo a la hora en la cual se
practico el levantamiento, tuvo un desperfecto dejando de funcionar, (Figura 11.10) que generó el no
vinculamiento para realizar el post-proceso.
Figura 11.8: Punto 41
- 153 -
Figura 11.9: Punto 110
Figura 11.10: Corte de UCOR que influyó el post-proceso de puntos 2 y 3
Resultados de la medición:
- 154 -
GNSS
PUNTOS
VECTORES
Name
WGS84 Latitude
WGS84
Longitude
UCOR
aux 1
154
153
110
41
7
2bis
1
31°26'05,85595S
31°26'05,92981S
31°26'06,19988S
31°26'04.43573S
31°26'09,81945S
31°26'07,32114S
31°26'24.50097S
31°26'15.79958S
31°26'05.22082S
64°11'36,62015W
64°11'32,58428W
64°11'24,87981W
64°11'26.30078W
64°11'20,07642W
64°11'20,37632W
64°11'26.91622W
64°11'29.54616W
64°11'29.21539W
Point
From
Point To
Horizontal
Precisión (m)
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
aux 1
153
1
154
41
110
2bis
7
0,002
0,004
0,003
0,006
0,258
0,178
0,005
0,012
WGS84
Ell.Height
(m)
462,779
459,644
462,642
464.185
462,560
462,725
462.606
462.172
464.077
Vertical
Precisión
(m)
0,004
0,007
0,007
0,011
0,094
0,062
0,006
0,019
Std Dev
n (m)
Std Dev
e (m)
Std Dev
u (m)
Std Dev
Hz (m)
0,000
0,001
0,004
0,003
0,041
0,070
0,011
0,004
0,002
0,000
0,001
0,004
0,003
0,174
0,248
0,006
0,002
0,002
0,000
0,004
0,011
0,007
0,062
0,094
0,019
0,006
0,007
0,000
0,002
0,006
0,004
0,178
0,258
0,012
0,005
0,003
dN (m)
dE (m)
dHt (m)
Solution
Type
-1,118
-46,829
-21,815
7,229
40,479
117,346
304,129
571,398
106,614
-272,079
-195,369
-310,182
-429,495
-438,248
-190,168
-262,530
-3,135
-1,335
-1,199
0,137
0,054
0,219
0,706
0,272
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Float,L1
Float,L1
Fixed,L1
Fixed,L1
Tabla 11.6: Valores de medición día 25-10-11 (GNSS)
Nuevamente hacemos la comparación con el sistema GPS, utilizando el mismo equipo de medición.
Figura 11.11: Vectores día 25-10-11
- 155 -
04 de Noviembre de 2011
Ante un gran esfuerzo de las autoridades de la Escuela de Agrimensura, llega a la facultad los
representantes de la firma SOKKIA a dar una charla instructiva sobre el equipo adquirido, lo cual fue de una gran
ayuda, ya que se pudo sacar todas las dudas que recaían sobre el equipamiento, una de ella fue indudablemente la
parte de la configuración del equipo para la medición en Stop and Go, mas bien era corroborar que si de la forma
con que se estaba haciendo era la correcta, pero la respuesta fue un “no”, por lo que se les pido una experiencia de
campo para ver el funcionamiento en esa modalidad de trabajo, lo cual accedieron sin ningún problema.
Lo que se hizo queda representado en la figura 11.12
En este mini curso que teníamos la dicha de participar, nos permitía hacer diversas preguntas de interés
para mi futuro trabajo final de carrera, en lo que no tuvieron ningún problema en ayudar. La gran incógnita a todo
esto era como era trabajar con un equipo de base (aux 1), ya que en todo momento se utilizo la Estación
Permanente UCOR como base, entonces fue lo que se insistió en trabajar en eso, se instalo uno de los equipos de
base sobre el predio de la facultad, y se utilizo el restante como móvil, en este momento empieza toda la atención
posible para que no se escape ni un solo detalle, lo que primero se hizo fue la gran traba que teníamos que fue su
configuración y la segunda mas importante fue el momento de la inicialización que se debe hacer en estos casos
cuando se trabaja con Stop and Go, estos equipos tienen la posibilidad de inicializar de dos formas diferentes, una
es la común a todas, dejar el equipo unos minutos en un punto fijo para que resuelva la ambigüedad a los satélites,
y la otra forma de inicializar es con el moderno sistema ON THE FLY, éste tiene la particularidad que es mucho
mas ágil que el anterior ya que no hace falta colocar el equipo en un punto fijo y esperar minutos de inicialización,
sino que se puede empezar a trabajar con ellos al momento de ser encendidos, ya que la ambigüedad la resuelve
en su trayecto en el cual se está trabajando, todo esto si no se pierde señal a los satélites.
Al momento de procesar los datos fue una gran satisfacción ver que cerraba todo, lo que esto quería decir,
es que se nos estaba abriendo las puertas para empezar hacer todas las practicas en Stop and Go que se venían
negando hasta el momento.
Figura 11.12: Vectores y recorrido día 04-11-11
La siguiente tarea era hacer la experiencia de campo con la modalidad Stop and Go, pero para hace mas
completo el día de campaña y aprovechar al 100% los dos equipos, se decidió trabajar con ambos equipos a la
- 156 -
vez, esto es, uno se encargaba de los Estáticos Rápidos, y el restante se encargaría de una doble medición, Stop
and Go más Dinámicos de todo el recorrido, cosa que era otra alternativa que nos ofrecía estos equipos.
08 de Diciembre de 2011
Se comienza con la campaña descripta, gracias a la ayuda de dos compañeros de facultad, Pablo Martínez
y Verónica Miranda, iniciamos la recorrida de los restantes puntos de Ciudad Universitaria
Tipo de Levantamiento
Periodo de medición
Intervalo de medición
Números de Épocas
Altura instrumental
Semana/día GPS
Estático Rápido
15 minutos
Cada 5 segundo
180
1.81 metros
1665/342
Tipo de Levantamiento
Periodo de medición
Intervalo de medición
Números de Épocas
Altura instrumental
Semana/día GPS
Tabla 11.8: Configuración Estático Rápido
Stop and Go
1 minutos
Cada 1 segundo
60
1.56 metros
1665/342
Tabla 11.9: Configuración Stop and Go
Se alcanzaron a tomar 8 puntos que restaban para completar los puntos de interés para este trabajo, con un
resultado satisfactorio, quedando un solo punto flotante (punto J), razón que se le atribuye a que estaba ubicado
debajo de un árbol (Figura 11.13), mas la hora que se hizo el levantamiento siendo demasiado tarde, la
configuración de los satélite no era la apropiada.
Figura 11.13: Punto J
- 157 -
Figura 11.14: Vectores día 08-12-11
En la tabla 11.11 muestra los resultados que se obtuvo tras el levantamiento Estático Rápido.
GNSS
PUNTOS
VECTORES
Name
Latitude
Longitude
UCOR
S
95
G
I
J
H
O
Q
31°26'05,85595S
31°25'58.81313S
31°26'28.83447S
31°26'36.95013S
31°26'20.44047S
31°26'06,02908S
31°26'33.59958S
31°26'32.09685S
31°26'06.45405S
64°11'36,62015W
64°11'00.08906W
64°11'03.53632W
64°11'41.15239W
64°11'10.07750W
64°11'07,13036W
64°11'12.78800W
64°10'58.23295W
64°10'32.89310W
Point
From
Point To
Horizontal
Precisión (m)
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
G
H
95
O
Q
S
I
J
0,012
0,006
0,002
0,001
0,004
0,009
0,006
0,304
Ell.Height
(m)
462,779
459.092
460.364
465.764
461.051
461,120
461.768
459.881
455.807
Vertical
Precisión
(m)
0,022
0,017
0,005
0,003
0,006
0,016
0,010
0,293
Std Dev
n (m)
0,000
0,007
0,002
0,011
0,004
0,157
0,004
0,001
0,003
Std Dev
e (m)
0,000
0,005
0,001
0,006
0,005
0,260
0,004
0,001
0,002
Std Dev
u (m)
0,000
0,016
0,005
0,022
0,010
0,293
0,017
0,003
0,006
Std Dev
Hz (m)
0,000
0,009
0,002
0,012
0,006
0,304
0,006
0,001
0,004
dN (m)
dE (m)
dHt (m)
Solution
Type
-2,886
1,100
2,514
2,996
7,071
3,786
1,827
1,659
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Float,L1
958,944 109,261
847,617 -638,669
698,203 -881,407
797,183 -1022,544
0,143
-1683,271
-227,501 -962,482
441,514 -705,872
-3,100
-778,895
Tabla 11.101: Valores de medición día 08-12-11 – Estático Rápido
Otras características de los puntos:
- 158 -
Name
S
95
G
I
J
H
O
Q
PDOP
1,804
1,549
1,921
1,466
2,388
1,705
1,888
1,690
HDPO
0,916
0,754
0,904
0,797
1,063
0,762
0,870
0,870
VDOP
1,554
1,354
1,696
1,231
2,139
1,525
1,675
1,448
GPS
7
8
7
9
6
7
9
7
GLONASS
6
7
9
6
6
8
6
6
Vector (m)
988,927
1124,348
965,070
832,511
778,836
1061,208
1296,464
1683,144
Tabla 11.11: Características de medición día 08-12-11
Demostración de los mismos puntos pero con el tipo de posicionamiento STOP AND GO. En este caso
también se consiguió que solo un punto quedara flotante (punto Q) al resto.
GNSS
PUNTOS
VECTORES
Name
Latitude
Longitude
UCOR
G
H
95
O
Q
S
J
I
31°26'05,85595S
31°26'36,93597S
31°26'33,59571S
31°26'28,83041S
31°26'32,09241S
31°26'06,44627S
31°25'58,81082S
31°26'06,04932S
31°26'20,43670S
64°11'36,62015W
64°11'41,14641W
64°11'12,78746W
64°11'03,53634W
64°10'58,23231W
64°10'32,89072W
64°11'00,08882W
64°11'07,16398W
64°11'10,09103W
Point
From
Point To
Horizontal
Precisión (m)
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
UCOR
G
H
95
O
Q
S
J
I
0,003
0,002
0,003
0,004
0,062
0,015
0,005
0,002
Ell.Height Std Dev n Std Dev e Std Dev u
(m)
(m)
(m)
(m)
462,779
0,000
0,000
0,000
465,921
0,002
0,002
0,005
461,713
0,001
0,001
0,005
460,227
0,019
0,010
0,015
459,793
0,003
0,003
0,007
455,669
0,038
0,050
0,073
459,136
0,013
0,007
0,037
461,569
0,003
0,003
0,016
461,021
0,001
0,001
0,002
Vertical
Precisión
(m)
0,005
0,005
0,008
0,007
0,073
0,037
0,016
0,002
Std Dev
Hz (m)
0,000
0,003
0,002
0,022
0,004
0,062
0,015
0,005
0,002
dN (m)
dE (m)
dHt (m)
Solution
Type
-957,31
-854,443
-707,682
-808,169
-18,318
216,955
-5,985
-449,131
-119,526
629,362
873,674
1013,732
1683,07
964,801
777,928
700,596
3,069
-1,155
-2,651
-3,118
-7,332
-3,719
-1,258
-1,812
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Float,L1
Fixed,L1
Fixed,L1
Fixed,L1
Tabla 11.12: Valores de medición día 08-12-11 – Stop and Go
Más Características de los puntos:
Name
G
H
95
O
Q
S
J
I
PDOP
1,799
1,811
1,873
1,536
1,878
2,265
2,763
1,550
HDPO
0,880
0,796
0,842
0,774
0,995
1,087
1,102
0,846
VDOP
1,568
1,627
1,673
1,327
1,592
1,987
2,534
1,299
GPS
6
6
6
8
7
6
6
7
GLONASS
8
8
8
6
5
5
6
6
Vector (m)
964,748
1061,212
1124,334
1296,457
1683,186
988,900
777,952
832,200
Tabla 11.13: Características de medición día 08-12-11
- 159 -
Los vectores del presente trabajo están representados en la figura 11.15:
Figura 11.15: Vectores dia 08-12-11 – Stop and Go
Esta tarea también venia anexada con el levantamiento del tipo de posicionamiento DINÁMICO, es
decir, que todo el recorrido realizado sobre el predio de Ciudad Universitaria, se lo midió con un Dinámico o
usualmente llamado Cinemático con post-proceso, característica de la configuración:
Tipo de Levantamiento
Intervalo de medición
Números de Épocas
Altura instrumental
Semana/día GPS
Dinámico
1 segundo
1
1.81 metros
1665/342
Tabla 11.14: Configuración Dinámico
Decimos entonces que se configuro para que fuese levantando datos cada un segundo de todo el
recorrido que se hizo, estos equipos nos ofrecen también la opción de en vez de utilizar la variable tiempo, es
decir, que mida cada cierta cantidad de tiempo en Cinemático, que lo haga cada una cierta distancia, entonces por
ejemplo si lo configuramos cada 5 metros, cada esa distancia tomara un valor.
A continuación se presenta una tabla con el resumen de los puntos, ya que por razones obvia no se
pueden mostrar todos los puntos obtenidos.
Cantidad
de puntos
PDOP
promedio
Precisión
horizontal
promedio (m)
Precisión
vertical
promedio (m)
Altura de
antena (m)
Semana/Día
GPS
16.524
1,799
0,020
0,015
1,94
1665/342
Tabla 11.15: Resumen de valores de Dinámicos día 08-12-12
- 160 -
Figura 11.16: Vectores y recorrido día 08-12-11 – Dinámicos
De la forma que se configuro el Software para el post-proceso se muestra en la siguiente imagen.
Figura 11.17: Configuración del software de post-proceso
Entonces podemos decir que, para los Estáticos Post-Proceso se tomara una tolerancia de 2 cm. para
distancias horizontales, y 5 cm. de tolerancia para las verticales. En los Cinemáticos Post-Proceso de configuro
para obtener una tolerancia de 5 cm. para distancias horizontales y 10 cm. en lo vertical.
11.4.1. ANALISIS PLANIMETRICO SOBRE VALORES OBTENIDOS POR GNSS Y GPS
Para empezar con el análisis es conveniente que pasemos en limpio todos los resultados obtenidos hasta el
momento, la tabla 11.17 muestra todos ellos:
- 161 -
GNSS
WGS84
Name WGS84 Latitude WGS84 Longitude Ell.Height
(m)
UCOR 31°26'05.86011S 64°11'36.62090W 462.878
b
31°26'03.37006S 64°11'40.79015W 447.747
c1
31°26'11.65447S 64°11'43.58007W 452.269
2bis 31°26'15.79958S 64°11'29.54616W 462.172
2
31°26'15.27333S 64°11'32.53409W 461.215
S
31°25'58.81313S 64°11'00.08906W 459.092
I
31°26'20.44047S 64°11'10.07750W 461.051
7
31°26'24.50097S 64°11'26.91622W 462.606
3
31°26'20.28352S 64°11'32.56737W 462.057
Q
31°26'06.45405S 64°10'32.89310W 455.807
G
31°26'36.95013S 64°11'41.15239W 465.764
95
31°26'28.83447S 64°11'03.53632W 460.364
H
31°26'33.59958S 64°11'12.78800W 461.768
1
31°26'05.22082S 64°11'29.21539W 464.077
153 31°26'04.43573S 64°11'26.30078W 464.185
O
31°26'32.09685S 64°10'58.23295W 459.881
134 31°26'11.83446S 64°11'23.65168W 462.825
44
31°26'16.60440S 64°11'24.97115W 462.86
46
31°26'15.37836S 64°11'19.07144W 462.338
Control
Both
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
Std Dev n Std Dev e Std Dev u Std Dev Hz
(m)
(m)
(m)
(m)
0.000
0.002
0.003
0.004
0.002
0.007
0.004
0.011
0.004
0.003
0.011
0.002
0.004
0.002
0.005
0.001
0.006
0.002
0.004
0.000
0.002
0.003
0.002
0.002
0.005
0.005
0.006
0.005
0.002
0.006
0.001
0.004
0.002
0.005
0.001
0.005
0.003
0.003
0.000
0.004
0.007
0.006
0.007
0.016
0.01
0.019
0.01
0.006
0.022
0.005
0.019
0.007
0.014
0.003
0.019
0.006
0.009
0.000
0.002
0.004
0.005
0.003
0.009
0.006
0.012
0.006
0.004
0.012
0.002
0.006
0.003
0.007
0.001
0.008
0.003
0.005
Tabla 11.16: Resumen de valores en Estático Ciudad Universitaria
Se logró recavar 25 puntos de éste sistema de apoyo, ya que habían puntos que no fueron encontrados
debido que, sobre Ciudad Universitaria sean llevado a cabo obras civiles que han modificado gran parte de su
forma antigua, lo cual en este nuevo diseño desaparecieron puntos fundamentales de los que se tenían datos,
también otros factores por lo que no se encontraron fue debido a la piratería y por la naturaleza, ya que mucho de
los puntos están enterrados o tapados con diversos materiales (tierra, hormigón, basura, etc.) y vegetación.
Los datos GPS (18 puntos), se obtuvieron en una campaña que se practicó sobre los mismos puntos, con
un equipo Sokkia del modelo Stratus. Las características del mismo se muestran a continuación para una mayor
información.
•
SOKKIA: STRATUS
o Precisión Estático:
5 mm + 1 ppm (horizontal)
o Cinemático Stop and go:
12 mm + 2.5 ppm (horizontal)
o L1: 12 canales con código y portadora.
10 mm + 2 PPM (vertical)
15 mm + 2.5 ppm (vertical)
Figura 11.18: Sokkia Stratus - Características
- 162 -
En la tabla 11.19 se muestran los datos GPS.
Name
Latitude
Longitude
UCOR
B
C
2 BIS
2
S
I
7
3
Q
G
95
H
1
153
O
134
44
46
31°26'05.86011"S
31°26'03.36994"S
31°26'11.65496"S
31°26'15.79933"S
31°26'15.27335"S
31°25'58.80457"S
31°26'20.44119"S
31°26'24.50013"S
31°26'20.28299"S
31°26'06.45429"S
31°26'36.94986"S
31°26'28.83504"S
31°26'33.59992"S
31°26'05.22056"S
31°26'04.43529"S
31°26'32.09736"S
31°26'11.83480"S
31°26'16.60492"S
31°26'15.37861"S
64°11'36.62090"W
64°11'40.79022"W
64°11'43.57614"W
64°11'29.54653"W
64°11'32.53408"W
64°11'00.09817"W
64°11'10.07841"W
64°11'26.91657"W
64°11'32.56677"W
64°10'32.89271"W
64°11'41.15219"W
64°11'03.53746"W
64°11'12.78821"W
64°11'29.21491"W
64°11'26.30067"W
64°10'58.23345"W
64°11'23.65207"W
64°11'24.97127"W
64°11'19.07136"W
Ell.Height
Std Dev Std Dev Std Dev Std Dev
Control
(m)
n (m) e (m) u (m) Hz (m)
462.878
449.292
454.155
463.493
462.767
460.758
462.546
464.087
463.548
457.277
467.232
461.763
463.210
464.031
464.126
459.824
462.893
462.893
462.384
Both
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
0.000
0.002
0.010
0.005
0.003
0.016
0.001
0.008
0.003
0.006
0.002
0.003
0.004
0.003
0.006
0.002
0.003
0.004
0.003
0.000
0.002
0.012
0.006
0.003
0.015
0.002
0.008
0.003
0.006
0.001
0.002
0.003
0.003
0.006
0.001
0.002
0.003
0.002
0.000
0.004
0.026
0.014
0.007
0.026
0.003
0.016
0.008
0.014
0.004
0.011
0.010
0.008
0.014
0.004
0.011
0.010
0.011
0.000
0.003
0.015
0.008
0.004
0.022
0.002
0.011
0.005
0.009
0.002
0.004
0.006
0.005
0.009
0.002
0.004
0.006
0.004
Tabla 11.17: Resumen de valores GPS año 2011en Estático Ciudad Universitaria
El próximo paso fue acomodar los valores para poder operar sobre ellos de una forma más simple. Ello se
demuestra en la tabla 11.18
GNSS
Puntos
B
C
2 BIS
2
S
I
7
3
Q
G
95
H
1
153
O
134
44
46
Latitud
º
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
`
26
26
26
26
25
26
26
26
26
26
26
26
26
26
26
26
26
26
"
3.37006
11.65447
15.79958
15.27333
58.81313
20.44047
24.50097
20.28352
6.45405
36.95013
28.83447
33.59958
5.22082
4.43573
32.09685
11.83446
16.60440
15.37836
Longitud
º
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
`
11
11
11
11
11
11
11
11
11
11
11
11
11
11
10
11
11
11
"
40.79015
43.58007
29.54616
32.53409
0.08906
10.07750
26.91622
32.56737
32.89310
41.15239
3.53632
12.78800
29.21539
26.30078
58.23295
23.65168
24.97115
19.07144
GPS
Puntos
B
C
2 BIS
2
S
I
7
3
Q
G
95
H
1
153
O
134
44
46
Latitud
º
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
31
`
26
26
26
26
25
26
26
26
26
26
26
26
26
26
26
26
26
26
"
3.36994
11.65496
15.79933
15.27335
58.80457
20.44119
24.50013
20.28299
6.45429
36.94980
28.83504
33.59992
5.22056
4.43529
32.09736
11.83480
16.60492
15.37861
Longitud
º
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
64
`
11
11
11
11
11
11
11
11
11
11
11
11
11
11
10
11
11
11
"
40.79022
43.57948
29.54653
32.53408
0.09817
10.07841
26.91657
32.56677
32.89271
41.15219
3.53746
12.78821
29.21491
26.30067
58.23345
23.65207
24.97127
19.07136
Tabla 11.18: Comparación valores GNSS/GPS
- 163 -
De manera que se está en condiciones para confeccionar el análisis comparativos entre ambos sistemas, el
procedimiento es a través de datos elipsoidales, debido a que el trabajar con datos proyectados infunde estar
trabajando con errores de la misma proyección, por tal motivo, se opta por trabajar con los datos originales
entregados por el equipo.
La ubicación geográfica del área de trabajo es en el PARALELO 30 SUR y MERIDIANO 60 OESTE.
11.4.1.1.
LONGITUDES LINEALES DE 1 GRADO EN LATITUD Y LONGITUD
La latitud mide el ángulo entre cualquier punto y el ecuador, medida sobre el meridiano que pasa por
dicho punto. Las líneas de latitud se llaman paralelos y son círculos paralelos al ecuador en la superficie de la
Tierra. La distancia en km a la que equivale un grado depende de la latitud, a medida que la latitud aumenta
disminuyen los kilómetros por grado. Para el paralelo del ecuador, sabiendo que la circunferencia que
corresponde al Ecuador mide 40.075,004 km, 1º equivale a 111,319 km.
La longitud mide el ángulo a lo largo del ecuador desde cualquier punto de la Tierra. En
Greenwich, Londres, es la longitud es 0º. Las líneas de longitud son círculos máximos que pasan por los polos y
se llaman meridianos. Para los meridianos, sabiendo que junto con sus correspondientes antimeridianos se
forman circunferencias de 40.007 km de longitud, 1º equivale a 111,131 km.
Para el cálculo de la variación de la Latitud, se necesita trabajar con el Radio de Curvatura Meridiana 76
76
P.S. Zakatov Pág. 37-59 – José Manuel Millán Gamboa Pág. 44 - Rubén Rodríguez.
- 164 -
º
∆1LAT
=
(
a × 1 − e2
(
)
1 − e 2 × sen 2ϕ
)
3/2
Para determinar la diferencia de 1 grado de latitud, correspondiente a Π radianes / 180, la distancia de
arco es de aproximadamente:
º
∆1LAT
=
π × a × (1 − e 2 )
(
(
180 × 1 − e 2 × sen 2ϕ
)
3/2
)
Para el elipsoide WGS 84 los valores de las constantes de cálculo son:
a = 6.378.137 m
b = 6.356.752,3142 m
e2 =
a2 − b2
(Excentricidad del elipsoide)
a2
La distancia en metros entre las latitudes (φ – 0,5 grados) y (φ + 0,5 grados) en WGS84 se da dentro de un
centímetro por77:
º
∆1LAT
= 111.132,954 − 559 ,822 × cos(2ϕ ) + 1,175 × cos(4ϕ )
En la tabla 11.19 se muestra los valores para las diferentes latitudes de trabajo
Para el cálculo de la variación de la Longitud, se necesita trabajar con el Radio de Curvatura Normal 78
Si se trabaja en un círculo perfecto, es correcto decir que la longitud de un grado de longitud depende del
radio del círculo para la latitud de trabajo, de radio a, siendo el valor de la longitud de un grado de longitud Π
radianes / 180 el incremento seria:
º
∆1LONG
=
π × a × cos ϕ
180
Pero como nuestra realidad está modelizada sobre un elipsoide, debemos incorporar sus variables al
citado análisis79.
º
∆1LONG
=
π × a × cos ϕ
(
(
180 × 1 − e 2 × sen 2ϕ
)
1/ 2
)
Para el elipsoide WGS 84 los valores de las constantes de cálculo son:
a = 6.378.137 m
b = 6.356.752,3142 m
77
Rapp, Richard H. (1991). Geodesia Geométrica, Parte I, Departamento de Ciencia Geodésica y Agrimensura, Universidad
Estatal de Ohio., Columbus, Ohio. [2] (Capítulo 3).
Osborne, P (2008) Las proyecciones de Mercator (capítulos 5,6)
78
P.S. Zakatov Pág. 37-59 – José Manuel Millán Gamboa Pág. 44 - Rubén Rodríguez.
79
Rapp, Richard H. (1991). Geodesia Geométrica, Parte I, Departamento de Ciencia Geodésica y Agrimensura, Universidad
Estatal de Ohio., Columbus, Ohio. [2] (Capítulo 3).
Osborne, P (2008) Las proyecciones de Mercator (capítulos 5,6)
- 165 -
e2 =
a2 − b2
(Excentricidad del elipsoide)
a2
En la tabla 11.19 se muestra los valores para las diferentes latitudes de trabajo.
Latitud (φ)
0º
15º
30º
45º
60º
75º
90º
º
∆1LAT
º
∆1LONG
110.574,307 m
110.648,7214 m
110.852,4555 m
111.131,779 m
111.412,2775 m
111.618,3616 m
111.693,951 m
111.319,4908 m
107.550,4887 m
96.486,28025 m
78.846,8351 m
55.800,00157 m
28.902,00581 m
0,00 m
Tabla 11.19: Constantes longitudinales para latitudes
Calculo de longitud lineal en lo que representa 1 minuto y 1 segundo de arco en LATITUD para el
paralelo de latitud 30º:
110852.4555km
= 1847 ,540925m
60'
110852.4555 km
=
= 30 ,792348 m
3600"
'
∆1LAT
=
"
∆1LAT
Cálculo de longitud lineal en lo que representa 1 minuto y 1 segundo de arco en LONGITUD para el
paralelo de latitud 30º:
96486 ,28025m
= 1608 ,104671m
60'
96486 ,28025m
=
= 26 ,801744 m
3600"
'
∆1LONG
=
"
∆1LONG
El análisis comparativo entre dos valores de latitud y longitud elipsoidales, se tratan con la siguiente
expresión80:
"
∆ϕ = ∆s × ∆1LAT
= [m]
"
∆λ = ∆s × ∆1LONG
× cos 30º = [ m ]
El cálculo de estas calidades de mediciones corresponde a la fórmula de EMC (error medio cuadrático)
que dice:
EMC =
En Donde:
∑
n
i =1
(∆N ) 2
n
∆ N = ∆ φ, ∆ λ
n = Cantidad de datos
80
Agrimensor Rubén Rodríguez – Ingeniero Agrimensor Miguel Díaz Saravia.
- 166 -
GNSS/GPS
LATITUD LONGITUD
Puntos
B
C
2 BIS
2
S
I
7
3
Q
G
95
H
1
153
O
134
44
46
∆s
0.000120
-0.000490
0.000250
-0.000020
0.008560
-0.000720
0.000840
0.000530
-0.000240
0.000330
-0.000570
-0.000340
0.000260
0.000440
-0.000510
-0.000340
-0.000520
-0.000250
GNSS/GPS
VARIACIÓN
LATITUD
VARIACIÓN
LONGITUD
Puntos
B
C
2 BIS
2
S
I
7
3
Q
G
95
H
1
153
O
134
44
46
(m)
0.004
-0.015
0.008
-0.001
0.264
-0.022
0.026
0.016
-0.007
0.010
-0.018
-0.010
0.008
0.014
-0.016
-0.010
-0.016
-0.008
(m)
-0.002
0.016
-0.010
0.000
-0.244
-0.024
-0.009
0.016
0.010
0.005
-0.031
-0.006
0.013
0.003
-0.013
-0.010
-0.003
0.002
EMC
0.064
0.059
∆s
-0.000070
0.000590
-0.000370
0.000010
-0.009110
-0.000910
-0.000350
0.000600
0.000390
0.000200
-0.001140
-0.000210
0.000480
0.000110
-0.000500
-0.000390
-0.000120
0.000080
Tabla 11.20: Calculo de variación de segundos
Tabla 11.21: EMC total de todas las muestras.
La figura 11.18 lo muestra gráficamente.
Variaciación Latitud
ANALISIS PLANIMÉTRICO GNSS/GPS
Variación Longitud
0.300
Diferencia (m)
0.200
0.100
0.000
-0.100
-0.200
-0.300
B
C
2 BIS
2
S
I
7
3
Q
G
95
H
1
153
O
134
44
46
Puntos
Figura 11.18: Gráfico de la totalidad de los datos
Primera conclusión, ésta demostración nos indica que tanto en la Latitud como en la Longitud se está en
6.4 cm. y 5.9 cm. respectivamente, por lo que se considera un tanto grande para la planimetría, pero en el
razonamiento se tomaron valores que dieron flotante, lo cual esto es una variante al análisis, para el segundo
análisis se eliminan estos valores atípicos para mejorar la comparación. La tabla 11.22 muestra los resultados
obtenidos.
- 167 -
GNSS/GPS
VARIACIÓN VARIACIÓN
LATITUD
LONGITUD
Puntos
B
C
2 BIS
2
I
7
3
Q
G
95
H
1
153
O
134
44
46
(m)
0.004
-0.015
0.008
-0.001
-0.022
0.026
0.016
-0.007
0.010
-0.018
-0.010
0.008
0.014
-0.016
-0.010
-0.016
-0.008
(m)
-0.002
0.016
-0.010
0.000
-0.024
-0.009
0.016
0.010
0.005
-0.031
-0.006
0.013
0.003
-0.013
-0.010
-0.003
0.002
EMC
0.014
0.013
Tabla 11.22: EMC de datos filtrados
Gráficamente lo mostramos de la siguiente manera (Figura 11.20)
Variaciación Latitud
ANALISIS PLANIMÉTRICO GNSS/GPS
Variación Longitud
0.030
Diferencia (m)
0.020
0.010
0.000
-0.010
-0.020
-0.030
-0.040
B
C
2 BIS
2
I
7
3
Q
G
95
H
1
153
O
134
44
46
Puntos
Figura 11.20: Gráfico de datos filtrados
11.4.1.2.
ANALISIS DE VECTORES
En esta oportunidad, se analiza como se comporta los módulos de los vectores de puntos medidos por
ambos sistemas, para ello se hizo un cruce de vectores sobre el mismo sistema de apoyo de Ciudad Universitaria
de la ciudad de Córdoba, para el análisis de sus diferencia, con trabajo de comparación como el presente, se llega
a una idea mas acabada de las diferencias planimétricas que existen entre ambos.
- 168 -
S'
35
B
6
37
137
B
1
R
R'
J1
111
136
139
S"
130
39
L
55
J2
J
Q
38
140
28
41
138
V2
43
121'
141
122
155
110
42
27
36
115
40
134
C
50'
133
112
75
121
49'
2
26
11
49
134'
2
11''
46
2'
44
3'
11'
116
120
135
44'''
5''
5'
I'
44''
3
54
113
5
D
12
119
118
I
44'
7'
7''
45
7'''
24
13
53
117
94'
A8
107'
B8
94
10
15
14
7
141'
97
100
9
99
96
8
4
98
156
95
V1
P
157
O
H
O
21
20
Figura 11.21: Análisis de Vectores Ciudad Universitaria
- 169 -
Q
Los datos de los puntos se muestran en la tabla 11.23
GNSS
Puntos
B
2
Q
O
º
31
31
31
31
Latitud
`
"
26 3.37006
26 15.27333
26 6.45405
26 32.09685
º
64
64
64
64
Longitud
GPS
Latitud
`
"
Puntos º `
"
º
11 40.79015
B
31 26 3.36994 64
11 32.53409
2
31 26 15.27335 64
11 32.89310
Q
31 26 6.45429 64
10 58.23295
O
31 26 32.09736 64
Longitud
`
"
11 40.79022
11 32.53408
11 32.89271
10 58.23345
Tabla 11.23: Puntos de análisis de vectores
Para poner en funcionamiento este razonamiento, se dispuso de datos planimétricos obtenidos a través de
Estación Total, que fueron obtenidos por Planeamiento de la Universidad Nacional de Córdoba. Cabe aclarar que
para obtener estos datos, se confecciono un sistema de referencia local, lo cual para hacer su análisis se llevo a
coordenadas georreferenciadas. Dichos datos se muestran a continuación.
Número Nombre
Y
X
2
B
853.440
2773.902
15
O
1977.638
1889.423
17
Q
2646.639
2679.426
21
2
1071.598
2407.364
Tabla 11.24: Puntos de análisis de vectores (Estación Total)
Para poner todo en un mismo sistema se transformo las coordenadas elipsoidales a planas con proyección
Gauss-Krüger faja 4, como lo muestra la tabla 11.25
COORDENADAS GAUSS KRUGUER
GNSS
X
Y
GPS
X
B
6522224.968 4386421.045
B 6522224.971
2
6521860.690 4386643.073
2 6521860.689
Q
6522149.323 4388215.262
Q 6522149.315
O
6521352.283 4387554.535
O 6521352.267
Y
4386421.044
4386643.073
4388215.273
4387554.522
Tabla 11.25 Puntos de análisis de vectores (GNSS, GPS)
V 1(GNSS ) = 1430.5167 m
V 2(GNSS ) = 1598.4643m
V 1(GPS ) = 1430.5198 m
V 2(GPS ) = 1598.473m
Diferencia = 0.0031m
Diferencia = 0.0087 m
V 1(GNSS ) = 1430.5167 m
V 2(GNSS ) = 1598.4643m
V 1(GPS ) = 1430.5198 m
V 2(GPS ) = 1598.473m
V 1( EST .TOT ) = 1430.428 m
Diferencia. promedio = 0.09 m
V 2( EST .TOT ) = 1598.3654 m
Diferencia. promedio = 0.10 m
- 170 -
CONCLUSIÓN FINAL EN PLANIMETRÍA:
Los resultados obtenidos están en relación a la cantidad de puntos medidos, al tipo de posicionamiento
utilizado, a la zona de trabajo, al modo de razonamiento y comparación de datos descriptos en el informe, y a
la cantidad de equipos de trabajo con la que se desarrolló la práctica, por tal motivo se concluye:
Después de hacer un análisis minucioso de cómo se comporta el sistema GNSS (GPS + GLONASS)
con respecto al sistema GPS en planimetría, se llega a la conclusión que, la diferencia en trabajar con equipos
GPS y GPS + GLONASS, registra un E.M.C. de 14 mm. en latitud y 13 mm. en longitud, para la experiencia
realizada, lo cual, dependiendo las tolerancias de trabajo, se puede emplear uno tanto como el otro.
Para la verificación de un sistema de apoyo previamente medido con estación total, se hizo una
comparación en las distancias de vectores, en el primer análisis se compara longitudes de vectores entre GPS y
GNSS, entregando valores de 3.1 mm. y 8.7 mm., rectificando el concepto de que en planimetría es ínfima la
diferencia entre ambos sistemas. Al contrastar vectores GPS/GNSS con vectores obtenidos con método
tradicional terrestre Estación Total, registró discrepancias de 90 mm y 100 mm., ésta diferencia viene
relacionada con la ESCALA de trabajo, debido a que al trabajar con Estaciones torales sus distancias están
reducidas al horizonte, en mediciones satelitales interviene alturas elipsoidales que son distancias geográficas.
Manifestando la bondad de los datos con que cuenta el sistema de apoyo, en relación a la gran cantidad de
puntos que lo integran en lo que respecta al tipo de medición empleado, las técnicas de compensación
utilizadas y con el agravante de señalar que los vectores que se usaron para tal análisis, no fueron medidos de
forma directa, lo cual, se finiquita diciendo que para las tolerancias de trabajo para la cual fue creado, ya sean
edilicias o de servicio, esta dentro de su régimen de utilidad.
CONCEPTOS UTILES:
•
Sabiendo de las tolerancias de trabajo para mensuras rurales y suburbanas, esta muy por encima de
ellas, lo cual indica que no existe el inconveniente el usar un equipo u otro, siempre vamos a estar
dentro de estas limitaciones.
•
Para mensuras urbanas, indica que estaríamos trabajando dentro de tolerancias, el inconveniente es el
no poder trabajar con estos tipos de equipos en la parte urbana.
•
En lo que respecta a obras, las tolerancias constructivas son muchos mas estrictas, lo que genera el
interrogativo si realmente se puede o no trabajar con éstos equipos, recordemos que el tipo de
posicionamiento con el que se trabajo para este análisis fue un estático rápido de 15 min., lo cual se
debería hacer un estudio mucho mas extensivo en materia de tiempo de medición, para lograr un
concepto mas fehaciente del uso de estos equipos GNSS para la labor de obra.
EN “PLANIMETRÍA” EL EMPLEAR UN EQUIPO GPS O UN EQUIPO GNSS NO REPRESENTA
DIFERENCIA SIGNIFICATIVAS A LA HORA DE LOS RESULTADOS OBTENIDOS.
- 171 -
11.4.2. ANALISIS ESTATICO RAPIDO vs STOP AND GO EN GNSS
Con el análisis correspondiente se pretende demostrar si al emplear un tipo de posicionamiento que nos
demanda un tiempo de 15 min. a 30 min., como lo es el Estático Rápido, representa una ventaja significativa en lo
que representa precisión de datos, con respecto a un tipo de posicionamiento que demanda mucho menos tiempo
de medición por punto, puntualmente se habla de Stop and Go, pero con el agravante de que esta modalidad
necesita estar todo el tiempo conectado satelitalmente.
Cabe aclarar que solamente éste estudio es con el sistema GNSS.
Los datos que se utilizarán serán los mismos que se utilizaron para el análisis anterior, con la
incorporación de datos obtenidos en la campaña de Agua de Oro, con la intención de mejorar el análisis.
La tabla 11.26 nos representa cuales serán los datos para este análisis.
ESTÁTICO RÁPIDO
STOP AND GO
Name
WGS84 Latitude WGS84 Longitude Name WGS84 Latitude WGS84 Longitude
UCOR
S
95
G
I
J
H
O
Q
31°26'05,85595S
31°25'58.80897S
31°26'28.83031S
31°26'36.94597S
31°26'20.43632S
31°26'06.02908S
31°26'33.59544S
31°26'32.09269S
31°26'06.44989S
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
31°05'06.45564S
31°05'02.22592S
31°04'51.81203S
31°04'28.10064S
31°04'03.61888S
31°03'40.28670S
31°03'42.86274S
31°03'42.29687S
31°03'58.11374S
64°11'36,62015W
64°11'00,08831W
S
31°25'58,81082S
64°11'03,53558W
95
31°26'28,83041S
64°11'41,15165W
G
31°26'36,93597S
64°11'10,07675W
I
31°26'20,43670S
64°11'07,13036W
J
31°26'06,04932S
64°11'12,78727W
H
31°26'33,59571S
64°10'58,23220W
O
31°26'32,09241S
64°10'32,89236W
Q
31°26'06,44627S
PUNTOS DE AGUA DE ORO
64°18'19.59948W
pf6
31°05'06,45572S
64°18'42.19470W
pf7
31°05'02,22547S
64°18'55.70992W
pf8
31°04'51,81205S
64°18'48.89921W
pf9
31°04'28,10079S
64°19'02.15659W
pf10
31°04'03,61839S
64°18'58.20494W
pf11
31°03'40,28686S
64°18'40.10922W
pf12
31°03'42,86321S
64°18'11.66138W
pf13
31°03'42,29700S
64°18'00.76604W
pf14
31°03'58,11362S
64°11'00,08882W
64°11'03,53634W
64°11'41,14641W
64°11'10,09103W
64°11'07,16398W
64°11'12,78746W
64°10'58,23231W
64°10'32,89072W
64°18'19,59940W
64°18'42,19462W
64°18'55,70978W
64°18'48,89959W
64°19'02,15616W
64°18'58,20550W
64°18'40,10981W
64°18'11,66119W
64°18'00,76647W
Tabla 11.26: Datos para el análisis Estático vs. SAG
Luego operando de la misma manera que en el estudio anterior decimos:
"
∆ϕ = ∆s × ∆1LAT
= [ m]
"
∆λ = ∆s × ∆1LONG
× cosϕ = [ m]
Para luego determinar el EMC de todos los valores obtenidos.
- 172 -
ESTÁTICO
vs. SAG
LATITUD
LONGITUD
ESTÁTICO
vs SAG
VARIACIÓN
LATITUD
VARIACIÓN
LONGITUD
Puntos
S
95
G
I
J
H
O
Q
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
∆s
-0.001850
-0.000100
0.010000
-0.000380
-0.020240
-0.000270
0.000280
0.003620
-0.000080
0.000450
-0.000020
-0.000150
0.000490
-0.000160
-0.000470
-0.000130
0.000120
∆s
-0.000510
-0.000760
0.005240
-0.014280
-0.033620
-0.000190
-0.000110
0.001640
0.000080
0.000080
0.000140
-0.000380
0.000430
-0.000560
-0.000590
0.000190
-0.000430
Puntos
S
95
G
I
J
H
O
Q
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
(m)
-0.057
-0.003
0.308
-0.012
-0.623
-0.008
0.009
0.111
-0.002
0.014
-0.001
-0.005
0.015
-0.005
-0.014
-0.004
0.004
(m)
-0.014
-0.020
0.140
-0.115
-0.901
-0.005
-0.003
0.044
0.002
0.002
0.004
-0.010
0.011
-0.014
-0.015
0.005
-0.011
EMC
0.171
0.223
Tabla 11.27: Variación de segundos Estático vs. SAG
Tabla 11.28: EMC Estático vs. SAG
En la tabla 11.28 se calculó el EMC pero se determinó que se podía reajustar este valor debido a que se
había tomado datos que habían quedado flotantes más un valor atípico (azul), por lo que se eliminaron del
análisis, la figura 11.21 muestra más en detalle lo explicado.
Variación Latitud
Analisis Planimétrico
Variación Longitud
0.400
Variación (m)
0.200
0.000
-0.200
-0.400
-0.600
-0.800
-1.000
-1.200
S
95
G
I
J
H
O
Q
pf6_1 pf7
pf8
pf9
pf10 pf11 pf12 pf13 pf14
Puntos
Figura 11.21: Gráfico de datos Estático vs. SAG
Entonces el nuevo análisis lo mostramos a continuación.
- 173 -
ESTATICO VARIACIÓN VARIACIÓN
vs SAG
LATITUD
LONGITUD
Puntos
S
95
I
H
O
Q
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
(m)
-0.057
-0.003
-0.012
-0.008
0.009
0.111
-0.002
0.014
-0.001
-0.005
0.015
-0.005
-0.014
-0.004
0.004
(m)
-0.014
-0.020
-0.115
-0.005
-0.003
0.044
0.002
0.002
0.004
-0.010
0.011
-0.014
-0.015
0.005
-0.011
EMC
0.033
0.033
Tabla 11.29: EMC de datos filtrados Estático vs. SAG
Analisis Planimètrico Ciudad Universitaria
Variación Latitud
Variación Longitud
0.150
Variación (m)
0.100
0.050
0.000
-0.050
-0.100
-0.150
S
95
I
H
O
Q
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
Puntos
Figura 11.22: Grafico de datos Estático vs. SAG filtrados
CONCLUSIÓN FINAL DEL USO DE ESTÁTICO RÁPIDO vs STOP AND GO:
Lo que se concluye esta en relación a la cantidad de puntos medidos, al tipo de posicionamiento
utilizado, a la zona de trabajo, al modo de razonamiento y comparación de datos descriptos en el informe, por
tal motivo se concluye:
Tras el análisis de datos filtrados se llega a un valor de e.m.c. que, se insiste nuevamente dependiendo
de las tolerancias de trabajo, el trabajar con stop and go es muy favorable, existiendo una diferencia de 3.3 cm.
en latitud y 3.3 cm. en longitud. La figura 11.22 muestra lo explicado.
- 174 -
Con respecto a operar con estático rápido, defendiendo el ideal que debido a todos los estudios
efectuado podemos afirmar que, el trabajar con GNSS en stop and go se llega a valores sorprendentes, con tan
solo 1 minuto de medición (60 épocas). Por tal motivo, se asevera la idea que el utilizar un equipo GNSS en
stop and go es la mejor forma de trabajar, para el caso analizado.
11.5.
ANALISIS ALTIMENTRICO - RED DE NIVELACIÓN ALTIMETRICA
Gracias a la ayuda de dos compañeros, José Ignacio Frattari y Fernando Martínez, que brindaron su apoyo
y participación en la ejecución de la campaña.
Lugar de trabajo: Localidad de Agua de Oro, Departamento Colón, Provincia de Córdoba.
El trabajo consistía en contrastar datos en altimetría de una red de puntos a la cual se le practicó una
nivelación geométrica, para luego, esos puntos ser medidos con un equipo GPS simple frecuencia. En tal caso,
sabiendo las virtudes de los GNSS en altimetría debido a la cantidad de satélites, seria una experiencia fabulosa
para poder disentir como funciona un GPS+GLONASS contra un GPS solamente y una nivel electrónico.
El trabajo de nivelación geométrica fue llevado a cabo con un nivel electrónico, éste trabajo se había
realizado unos días atrás. Los tramos eran básicamente dos, uno lineal de unos 17 Km. y un rodeo de unos 10
Km., en los cuales cada mil metros había estacas y/o mojones fijos de paso.
Se inician las actividades habiendo previsto que todo el trabajo completo se haría en dos días, en esta
primera jornada se decide hacer el rodeo en Estático Rápido, lo cual sabiendo que por cada levantamiento se
demoraría 30 minutos, y a parte recorrer los 10 Km. a pie, llevaría casi todo el día.
Los vectores de los datos recavados están expresados en la figura 11.30.
Figura 11.23: Vectores del día 16-11-11
La tabla 11.30 muestra los resultados obtenidos.
- 175 -
GNSS
PUNTOS
Name
WGS84 Latitude
WGS84 Longitude
WGS84
Ell.Height
(m)
Control
Std Dev
n (m)
Std Dev
e (m)
Std Dev u
(m)
Std Dev
Hz (m)
UCOR
base_1
pf5
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
31°26'05,85595S
31°03'39,57365S
31°05'02.76371S
31°05'06.45564S
31°05'02,22585S
31°04'51,81194S
31°04'28,10062S
31°04'03,61855S
31°03'40,28677S
31°03'42,86285S
31°03'42,29694S
31°03'58,11367S
64°11'36,62015W
64°16'42,73379W
64°17'36.96724W
64°18'19.59948W
64°18'42,19449W
64°18'55,70970W
64°18'48,89906W
64°19'02,15621W
64°18'58,20497W
64°18'40,10944W
64°18'11,66143W
64°18'00,76605W
462.779
781.671
784.352
816.504
838.314
875.778
821.228
864.469
880.690
865.991
857.251
814.211
Both
Both
None
None
None
None
None
None
None
None
None
None
0.000
0.000
0.002
0.002
0.002
0.003
0.002
0.003
0.002
0.003
0.003
0.002
0.000
0.000
0.002
0.001
0.002
0.003
0.002
0.002
0.002
0.004
0.004
0.002
0.000
0.000
0.004
0.004
0.005
0.008
0.005
0.006
0.005
0.010
0.009
0.006
0.000
0.000
0.002
0.002
0.002
0.004
0.003
0.004
0.003
0.005
0.004
0.003
VECTORES
Point
From
Point To
Duration
Horizontal
Precision (m)
Vertical
Precision (m)
Solution
Type
GPS
week,day
Distancie (m)
UCOR
base_1
base_1
base_1
base_1
base_1
base_1
base_1
base_1
base_1
base_1
base_1
pf5
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
8:53:10
0:30:25
0:30:05
0:31:00
0:30:20
0:30:05
0:30:25
0:31:40
0:30:05
0:30:05
0:30:00
0.022
0.002
0.001
0.005
0.004
0.003
0.004
0.003
0.005
0.004
0.003
0.032
0.004
0.004
0.010
0.008
0.005
0.006
0.005
0.010
0.009
0.006
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
Fixed,L1
1662.320
1662.320
1662.320
1662.320
1662.320
1662.320
1662.320
1662.320
1662.320
1662.320
1662.320
42252.147
2938.208
3709.145
4063.904
4170.041
3664.057
3771.097
3593.516
3115.047
2360.650
2146.607
Tabla 11.30: Valores de medición día 16-11-11 – Estático Rápido
11.5.1.
ANÁLISIS COMPARATIVO
ALTURAS ELIPOSIDALES (WGS84).
DE
DESNIVELES
EMPLEANDO
Para el análisis comparativo primero se consigue los valores
obtenidos a través de un nivel electrónico en la nivelación geométrica
correspondiente, el punto de partida es el denominado PF 10 con cota
geométrica perteneciente a la Red Nº 112 ubicado en General Paz, de esta
manera la tabla 11.31 muestra los valores de la nivelación geométrica.
PUNTO COTA FINAL DESNIVEL
PF 10
527.2280
MJ04
746.6999
26.7445
MJ05
757.5875
10.8876
PIEDR
756.7185
-0.8690
MJ06
789.7434
33.0249
Este trabajo de comparación se haría en función de los dos
MJ07
811.5180
21.7746
equipos que midieron a la misma vez lo mismos puntos, con la misma
MJ08
848.9410
37.4230
ventana satelital, empleando la misma mascara de elevación que en todo
MJ09
794.3945
-54.5465
los casos fue de 15º, lo cual, en el caso de GPS se utilizo un Trimble R3
MJ10
837.5658
43.1713
simple frecuencia, y para GNSS se empleo un Sokkia GRX1 simple
MJ11
853.7777
16.2119
frecuencia doble constelación, siempre tomando como valor de contralor
MJ12
839.0907
-14.6870
los obtenidos por la nivelación geométrica.
MJ13
830.4319
-8.6588
MJ14
787.4024
-43.0295
MJ15
791.6038
4.2014
Tabla 11.31: Valores de Nivelación Geométrica
- 176 -
Este trabajo de comparación se haría en función de los dos equipos que midieron a la misma vez lo
mismos puntos, con la misma ventana satelital, empleando la misma mascara de elevación que en todo los casos
fue de 15º, lo cual, estamos hablando por un lado un GPS Trimble R3 simple frecuencia, y por el otro lado, un
GNSS Sokkia GRX1 simple frecuencia doble constelación, siempre tomando como valor de contralor los
obtenidos por la nivelación geométrica.
El análisis consistía en emplear datos elipsoidales como el caso del estudio que se practicó en planimetría,
por tal motivo, se acondiciono dos tipos de estudios, ellos son:
•
Análisis de los desniveles empleando en ambos casos alturas elipsoidales (h).
•
Análisis de cómo se comportaba la ondulación del Geoide (N) en todos los casos.
El cálculo de estas calidades de mediciones corresponden a la fórmula de EMC que dice:
EMC =
∑
n
i =1
(∆N ) 2
n
Los datos de desniveles de alturas elipsoidales en ambos sistemas, en relación a los desniveles que nos
entregaba la nivelación geométrica, se muestran en la tabla 11.40
NIVELACIÓN GEOMÉTRICA
PUNTO COTA FINAL DESNIVEL
MJ04
746.6999
26.7445
MJ05
757.5875
10.8876
MJ06
789.7434
33.0249
MJ07
811.5180
21.7746
MJ08
848.9410
37.4230
MJ09
794.3945
-54.5465
MJ10
837.5658
43.1713
MJ11
853.7777
16.2119
MJ12
839.0907
-14.6870
MJ13
830.4319
-8.6588
MJ14
787.4024
-43.0295
MJ15
791.6038
4.2014
ESTÁTICO RÁPIDO GNSS
PTO
h
Desnivel Diferencia
pf6_1 816.504
pf7 838.314 21.810
0.0354
pf8 875.778 37.464
0.0410
pf9 821.228 -54.550 -0.0035
pf10 864.469 43.241
0.0697
pf11 880.690 16.221
0.0091
pf12 865.991 -14.699 -0.0120
pf13 857.251 -8.740
-0.0812
pf14 814.211 -43.040 -0.0105
EMC
ESTÁTICO RÁPIDO GPS
PTO
h
Desnivel Diferencia
pf6_1 816.515
pf7 838.339 21.824
0.0494
pf8 875.768 37.429
0.0060
pf9 821.235 -54.533
0.0135
pf10 864.474 43.239
0.0677
pf11 880.698 16.224
0.0121
pf12 865.969 -14.729 -0.0420
pf13 857.267 -8.702
-0.0432
pf14 814.184 -43.083 -0.0535
0.0429
EMC
0.0417
DESNIVEL (m)
Tabla 11.32: Análisis de EMC con valores de altura elipsoidal
0.0800
0.0600
0.0400
0.0200
0.0000
-0.0200
-0.0400
-0.0600
-0.0800
-0.1000
GNSS
GPS
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
PUNTOS
Figura 11.24: Desniveles comparados con nivelación geométrica
- 177 -
En el análisis se determina que existe una diferencia entre desniveles en alturas elipsoidales y cotas de
nivelación geométrica de 42.9 mm. en Estático Rápido GNSS y 41.7 mm. en Estático Rápido GPS, para la
cantidad de puntos analizados, la modalidad de trabajo, el lugar físico de trabajo y el tipo de posicionamiento
utilizado.
Afirmando el ideal de que en altimetría tampoco existen grandes diferencias, en relación a los resultados
obtenidos hasta el momento, se decide reforzar el análisis con otro estudio, y en este caso lo que se hace es hacer
la comparativa entre ambos sistemas de sus alturas elipsoidales.
ESTÁTICO RÁPIDO
GNSS
PTO
h (m)
pf6_1
816.504
pf7
838.314
pf8
875.778
pf9
821.228
pf10
864.469
pf11
880.690
pf12
865.991
pf13
857.251
pf14
814.211
ESTÁTICO RÁPIDO
GPS
PTO
h (m)
pf6_1
816.515
pf7
838.339
pf8
875.768
pf9
821.235
pf10
864.474
pf11
880.698
pf12
865.969
pf13
857.267
pf14
814.184
PROMEDIO
Diferencia
h (m)
0.011
0.025
-0.010
0.007
0.005
0.008
-0.022
0.016
-0.027
0.0014
Tabla 11.33: Diferencias entre alturas elipsoidales
Se determina que la diferencia promedio de alturas elipsoidales entre ambos sistemas, para la cantidad de
datos analizados y el tipo de posicionamiento utilizado, es de 1.4 mm.
Para el análisis de la determinación de la Ondulación del Geoide (N), se aplica la expresión siguiente:
h= N+H
N = h−H
El siguiente análisis pretende demostrar que error se esta cometiendo en la determinación de N con uno u
otro sistema. Eso seria el EMC de toda la muestra hasta ahora analizada.
ESTÁTICO RÁPIDO GNSS
PTO
h (m)
N (m)
pf6_1
816.504
26.761
pf7
838.314
26.796
pf8
875.778
26.837
pf9
821.228
26.834
pf10
864.469
26.903
pf11
880.690
26.912
pf12
865.991
26.900
pf13
857.251
26.819
pf14
814.211
26.809
ESTÁTICO RÁPIDO GPS
PTO
h (m)
N (m)
pf6_1
816.515
26.772
pf7
838.339
26.821
pf8
875.768
26.827
pf9
821.235
26.841
pf10
864.474
26.908
pf11
880.698
26.920
pf12
865.969
26.878
pf13
857.267
26.835
pf14
814.184
26.782
∆N (m)
-0.0110
-0.0250
0.0100
-0.0070
-0.0050
-0.0080
0.0220
-0.0160
0.0270
EMC
0.0165
Tabla 11.34: Análisis de EMC con valores de ∆N
- 178 -
0.0300
∆ N (m)
0.0200
0.0100
0.0000
-0.0100
-0.0200
-0.0300
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
Puntos
Figura 11.25: Gráfico de ∆N
Con el presente análisis se termina el estudio altimétrico, demostrando que con la cantidad de puntos
analizados, el tipo de posicionamiento utilizado y en lo que respecta a toda la modalidad de trabajo empleada, se
determina que, existe un error medio en la determinación de la ondulación de geoide (N) de 16mm., lo que
representa que el uso en altimetría de GNSS o GPS no registra diferencias significativas.
Ahora se pretende conocer el N promedio que existe entre ambos sistemas.
NIVELACION GEOMETRICA
PUNTO COTA FINAL DESNIVEL
MJ04
746.6999
26.7445
MJ05
757.5875
10.8876
MJ06
789.7434
33.0249
MJ07
811.5180
21.7746
MJ08
848.9410
37.4230
MJ09
794.3945
-54.5465
MJ10
837.5658
43.1713
MJ11
853.7777
16.2119
MJ12
839.0907
-14.6870
MJ13
830.4319
-8.6588
MJ14
787.4024
-43.0295
ESTÁTICO RÁPIDO GNSS
PTO
h (m)
N (m)
pf6_1
816.504
26.761
pf7
838.314
26.796
pf8
875.778
26.837
pf9
821.228
26.834
pf10
864.469
26.903
pf11
880.690
26.912
pf12
865.991
26.900
pf13
857.251
26.819
pf14
814.211
26.809
N PROMEDIO
26.842
ESTÁTICO RÁPIDO GPS
PTO
h (m)
N (m)
pf6_1
816.515 26.772
pf7
838.339 26.821
pf8
875.768 26.827
pf9
821.235 26.841
pf10
864.474 26.908
pf11
880.698 26.920
pf12
865.969 26.878
pf13
857.267 26.835
pf14
814.184 26.782
N PROMEDIO
26.843
Tabla 11.35: Diferencias entre alturas elipsoidales
El cálculo de N promedio para la zona de trabajo, empleando ambos sistemas, nos dice que existe una
diferencia de 1 mm., rectificando el concepto que se venia manejando, que el uso de GNSS y GPS en Altimetría,
no expresa contraste alguno.
- 179 -
26.950
N GPS
26.900
N GNSS
26.850
N (m) 26.800
26.750
26.700
26.650
MJ06 MJ07 MJ08 MJ09 MJ10 MJ11 MJ12 MJ13 MJ14
Puntos
Figura 11.26: Valores de N en ambos sistemas
11.5.2.
VENTAJAS
CAMPAÑA.
GNSS
CON
RESPECTO
A
GPS
PERCIBIDA
EN
El presente análisis es puramente una descripción de la enseñanza que dejó el empleo de GNSS con
respecto a GPS en el campo de acción.
La experiencia de campo fue desarrollada con equipo GNSS, en el mismo tiempo y forma que se empleo
un equipo GPS, por tal motivo, se estuvo en presencia de la gran diferencia que existe el empleo de un sistema
que trabaja con una gran cantidad de satélites en forma simultanea, a un sistema que lo hace con menos de la
mitad de satélites.
Puntualmente el trabajando en la modalidad Cinemático, ya sea Stop and Go y/o Dinámico, lo que genera
tener una recepción continua de señal por parte de los satélites, sucedía que el equipo GPS en algunos sectores
donde la extensa vegetación se hacia presente perdía conexión, lo cual generaba hacer una reinicialización, esta
acción tiene varios altercados, ya sea volver al punto en el cual se tenia señal anteriormente y reinicializar ahí,
traducido en perdida constante de tiempo en una campaña, buscar caminos alternativos para poder pasar sin la
perdida de señal u ocasionalmente previa campaña hacer lo que se llama un planning, que es ni mas ni menos, a
través de un software determinar la mejor configuración de satélites para ciertas horas del día, lo que al usar estos
equipos, el operador esta condicionado con ello debiendo acudir al lugar de trabajo a horas estipuladas.
Este inconveniente en GNSS no sucede, el equipo en todo momento esta en plena recepción continua de
señal, transitando por lugares donde el uso de GPS es imposible, ya sea una vegetación demasiado tupida o en el
interior de ciudades con edificios.
La tabla 11.36 se muestra un caso particular de lo que se está explicando, éste caso pertenece a la
experiencia en Agua de Oro.
PTOS
PF5EST
pf06est
PF7EST
pf08est
PF9EST
pf10et
PF11EST
pf12est
PF13EST
pf14est
GPS
PDOP
2.49
2.58
2.58
1.98
2.12
3.23
3.56
2.72
2.70
2.58
SATELITES
8
8
8
8
8
8
7
7
7
7
PTOS
pf5
pf6_1
pf7
pf8
pf9
pf10
pf11
pf12
pf13
pf14
GNSS
PDOP
SATELITES
1.246
20
1.645
21
1.484
21
1.463
22
1.594
17
1.676
15
1.433
15
1.774
16
1.927
18
1.655
18
Tabla 11.36: Diferencias entre PDOP/Satélites entre ambos sistemas
- 180 -
Otro caso particular fue, al realizar la práctica en Ciudad Universitaria, al trabajar también en Cinemático,
se hizo la experiencia de pasar en todo momento por extensa vegetación, esto es, la ventana satelital era
prácticamente nula, y el equipo en ningún caso perdió la señal, la figura 11.27 representa lo acontecido.
Figura 11.27: Cinemático sin pérdida de señal.
- 181 -
CONCLUSIÓN FINAL EN ALTIMETRÍA:
Los resultados obtenidos están en relación a la cantidad de puntos medidos, al tipo de posicionamiento
utilizado, a la zona de trabajo, al modo de razonamiento y comparación de datos descriptos en el informe, y a
la cantidad de equipos de trabajo con la que se desarrolló la práctica, por tal motivo se concluye:
•
Tras el extenso estudio que se practicó sobre altimetría en el uso de GNSS, se concluye que al estudiar
los desniveles provocados por la nivelación geométrica, y los desniveles conseguidos con alturas
elipsoidales, entre los distintos sistemas el error medio que existe es:
41.7 mm.
o
GPS:
o
GNSS: 42.9 mm.
Manifestando esta magnitud como la dispersión existente entre ambos sistema en relación a una
nivelación geométrica.
•
Al llevar a cabo el análisis de cómo variaban los valores de N con respecto a una nivelación
geométrica, se demostraron dos conceptos:
o
El error medio que se comete al emplear un sistema u otro, es de 16mm en la obtención de N.
o
La diferencia de los promedios de N para la zona en estudio, es de 1mm entre ambos sistemas.
Afirmando que, dependiendo las tolerancias constructivas de trabajo el uso de GNSS en altimetría, es
recomendable usarlo en nivelación para obras de grandes tolerancias, ya sea Electroductos, Caminos, Rutas,
etc.
El uso de GNSS en altimetría en obras que trabajan por gravedad, ya sea Acueductos, Oleoductos,
Poliductos, etc., se necesita hacer un examen mas exhaustivo entre las relaciones tiempo de medición – tipo de
posicionamiento – precisión para afirmar fehacientemente su uso para estos casos.
- 182 -
CONCLUSIÓN GENERAL DEL TRABAJO
El utilizar receptores capaces de recoger y procesar la señal proveniente de satélites de la constelación
GPS y de la constelación GLONASS aporta sin duda algunas ventajas, pero antes se intenta destacar una
característica que no se va a ver beneficiada significativamente por el hecho de disponer de ambos sistemas, y
es la “precisión”. En realidad, y para poner un símil, es como si realizáramos una trisección inversa a 20
vértices conocidos ó a 50. O como si midiésemos una distancia con cinta métrica 30 ó 40 veces, el aumento de
precisión no sería significativo. De hecho la obtenida con GPS ya es muy buena (en modo diferencial),
pudiendo alcanzarse precisiones centimétricas e incluso milimétricas utilizando el método adecuado en
condiciones ideales. Fundamento a esta mención, por lo demostrado en las experiencias de campo realizadas.
Entonces qué aporta GLONASS? Fundamentalmente lo siguiente:
1- Mayor cobertura
2- Mayor velocidad de inicialización y reinicialización
La mayor cobertura se nota en alguna situación como levantamientos urbanos, en los que los
obstáculos (generalmente edificaciones), impiden el observar más de 4 satélites GPS. En estos casos, el
disponer de una segunda constelación como GLONASS, puede aumentar el número de satélites a 5, 6 e incluso
7 satélites, haciendo posible el continuar trabajando en esas circunstancias. Esto también se puede producir en
lugares angostos como valles profundos y escarpados, acantilados y en definitiva en todos aquellos lugares
donde la cobertura quede limitada por obstáculos.
Otro aspecto importante de los receptores GPS+GLONASS es su mayor velocidad de inicialización y
reinicialización. El tiempo necesario para inicializar los receptores depende entre otros de la posición de los
satélites y de su número, además del algoritmo y calidad del receptor. Pero, suponiendo dos receptores
idénticos en el mismo lugar y momento, que tengan recepción de señal de 8 satélites y que a uno de ellos se le
ha indicado que no considere la señal de 4 de estos satélites, este receptor tardará más tiempo en inicializar
que el que capta los 8 satélites. De este modo un receptor con capacidad GPS+GLONASS siempre inicializará
más rápido que un receptor solo GPS, si el resto de las condiciones son idénticas.
Pero más importante y útil que lo anterior es la rapidez en la reinicialización, esta operación esta
relacionada al tiempo que se demora en volver a inicializar, es por ello que, la reinicialización en equipos
satelitales esta en función de: tipo de receptor (simple o doble frecuencia), posición de los satélites (GDOP),
cantidad de satélites y algoritmo de calculo del receptor. Entonces, la aportación de satélites GLONASS al
sistema GPS va a proporcionar una reducción en el tiempo de reinicialización muy significativa. Esto le ofrece
al usuario una mayor comodidad y aumento de productividad.
- 183 -
INDICE GENERAL
INTRODUCCIÓN ...................................................................................................................................................................- 5 OBJETIVOS ............................................................................................................................................................................- 6 METAS………. .......................................................................................................................................................................- 6 CAPITULO 1 ........................................................................................................................................................................ - 7 MARCO TEORICO ..............................................................................................................................................................- 7 SISTEMAS GLOBALES DE NAVEGACIÓN POR SATÉLITE ......................................................................................... - 7 1.1.
1.2.
1.2.1.
1.2.1.1.
1.2.1.1.1.
1.2.1.1.2.
1.2.1.2.
1.2.1.3.
1.2.1.4.
1.2.1.5.
1.2.1.6.
1.2.1.7.
1.2.1.7.1.
1.2.1.8.
1.2.1.8.1.
1.2.1.8.2.
1.2.1.9.
1.2.1.10.
1.2.1.11.
1.2.1.12.
1.3.
INTRODUCCIÓN ................................................................................................................................................- 7 ANTECEDENTES DE RADIONAVEGACIÓN Y NAVEGACIÓN POR SATÉLITE .......................................- 8 SISTEMAS DE RADIONAVEGACIÓN: ............................................................................................................- 8 SISTEMA VOR ....................................................................................................................................................- 8 EQUIPO DE TIERRA. PRINCIPIOS DE FUNCIONAMIENTO ........................................................................- 8 EQUIPO DE A BORDO DE LA AERONAVE ....................................................................................................- 9 SISTEMA TACAN ...............................................................................................................................................- 9 SISTEMA VORTAC ..........................................................................................................................................- 10 SISTEMA LORAN .............................................................................................................................................- 10 SISTEMA ADF ..................................................................................................................................................- 11 SISTEMA INERCIAL (INS) ..............................................................................................................................- 12 SISTEMA OMEGA ............................................................................................................................................- 12 USO OPERACIONAL DEL OMEGA ...............................................................................................................- 13 SISTEMA DOPPLER .........................................................................................................................................- 13 INTRODUCCIÓN HISTÓRICA ........................................................................................................................- 14 MÉTODOS DOPPLER DE OBSERVACIÓN POR SATÉLITE........................................................................- 15 MÉTODO DEL PUNTO AISLADO ..................................................................................................................- 15 MÉTODO DE TRANSLOCACIÓN ...................................................................................................................- 15 MÉTODO DEL ARCO CORTO.........................................................................................................................- 15 MÉTODO DEL ARCO SEMICORTO ...............................................................................................................- 15 HISTORIA DEL GNSS. .....................................................................................................................................- 16 -
CAPITULO 2 ...................................................................................................................................................................... - 17 SISTEMAS EXISTENTES Y SU EVOLUCIÓN: GNSS-1 Y GNSS-2 .......................................................................... - 17 2.1.
2.2.
2.2.1.
2.2.2.
2.2.2.1.
2.2.3.
2.2.3.1.
2.2.3.1.1.
2.2.3.1.2.
2.2.3.1.3.
2.2.3.1.4.
2.2.3.1.5.
2.2.3.1.6.
2.2.3.2.
2.2.3.2.1.
2.2.3.3.
2.2.3.3.1.
2.2.3.4.
2.2.3.4.1.
2.2.3.5.
2.2.3.5.1.
2.2.3.6.
2.2.3.6.1.
INTRODUCCIÓN ..............................................................................................................................................- 17 SISTEMAS GNSS ..............................................................................................................................................- 17 SISTEMA DE AUMENTO BASADO EN AERONAVES: ABAS ....................................................................- 18 SISTEMA DE AUMENTO BASADO EN TIERRA: GBAS..............................................................................- 18 SISTEMA DE AUMENTACIÓN REGIONAL BASADA EN TIERRA (GRAS) .............................................- 19 SISTEMA DE AUMENTO BASADO EN SATÉLITES: SBAS ........................................................................- 19 SISTEMA DE AUMENTO WASS.....................................................................................................................- 20 ELEMENTO DEL SISTEMA WASS.................................................................................................................- 20 ESTACIONES DE REFERENCIA DE AREA AMPLIA (WRS) .......................................................................- 20 ESTACIONES MAESTRAS DE ÁREA AMPLIA (WMS) ...............................................................................- 21 ESTACIONES DE COMUNICACIONES (GES) ..............................................................................................- 21 SATÉLITES GEOESTACIONARIOS ...............................................................................................................- 21 RECEPTORES DEL WAAS ..............................................................................................................................- 21 SISTEMA DE AUMENTO SDMC ....................................................................................................................- 21 ESTRUCTURA SDMC .....................................................................................................................................- 21 SISTEMA DE AUMENTO EGNOS ..................................................................................................................- 22 ELEMENTOS DEL SISTEMA EGNOS ............................................................................................................- 22 SISTEMA DE AUMENTO MSAS .....................................................................................................................- 23 ELEMENTOS DEL SISTEMA MSAS ...............................................................................................................- 23 SISTEMA DE AUMENTO GAGAN .................................................................................................................- 24 FASE DE IMPLANTACION .............................................................................................................................- 24 SISTEMA DE AUMENTO SACCSA ................................................................................................................- 25 EVOLUCION DEL PROYECTO .......................................................................................................................- 25 -
CAPITULO 3 ...................................................................................................................................................................... - 26 GPS (GLOBAL POSITIONING SYSTEM)..................................................................................................................... - 27 3.1.
HISTORIA..........................................................................................................................................................- 27 - 184 -
3.2.
3.2.1.
3.2.1.1.
3.2.1.2.
3.2.1.3.
3.2.1.3.3.
3.2.1.3.4.
3.2.1.3.5.
3.2.1.4.
3.2.2.
3.2.3.
3.2.4.
3.2.4.1.
3.3.
3.3.1.
3.4.
3.4.1.
3.5.
3.6.
3.7.
3.7.1.
3.7.2.
3.8.
3.9.
3.10.
3.10.1.
3.10.2.
3.10.3.
3.11.
3.11.1.
3.11.2.
3.11.3.
3.11.4.
3.11.5.
3.11.6.
3.11.7.
3.12.
3.12.1.
3.12.2.
3.12.3.
3.12.4.
ESTRUCTURA DEL SISTEMA GPS ................................................................................................................- 28 SEGMENTO ESPACIAL ...................................................................................................................................- 28 BLOQUE I DE SATÉLITES GPS ......................................................................................................................- 29 BLOQUE II DE SATÉLITES GPS .....................................................................................................................- 29 BLOQUE IIA DE SATÉLITES GPS ..........................................................................................................................- 30 BLOQUE IIR DE SATÉLITES GPS ..........................................................................................................................- 31 BLOQUE IIR-M DE SATÉLITES GPS .....................................................................................................................- 32 BLOQUE IIF DE SATÉLITES GPS...........................................................................................................................- 33 BLOQUE III DE SATÉLITES GPS ...........................................................................................................................- 34 IDENTIFICACIÓN ............................................................................................................................................- 34 RELOJES DE LOS SATÉLITES........................................................................................................................- 35 SEÑAL DE LOS SATÉLITES. ..........................................................................................................................- 35 SEÑAL GPS MODERNAS. ...............................................................................................................................- 36 SEGMENTO DE CONTROL .............................................................................................................................- 37 ESQUEMA DE FUNCIONAMIENTO DEL SEGMENTO DE CONTROL......................................................- 38 SEGMENTO USUARIO ....................................................................................................................................- 39 INFORMACIÓN EN EL RECEPTOR ...............................................................................................................- 39 SERVICIOS GPS................................................................................................................................................- 40 SISTEMA DE TIEMPO GPS .............................................................................................................................- 40 EFEMÉRIDES....................................................................................................................................................- 41 EFEMÉRIDES TRANSMITIDAS .....................................................................................................................- 42 EFEMÉRIDES PRECISAS ................................................................................................................................- 42 ALMANAQUE...................................................................................................................................................- 42 DATUM..............................................................................................................................................................- 43 PRINCIPIO DE FUNCIONAMIENTO DEL SISTEMA GPS............................................................................- 43 PSEUDO RANGO SOBRE EL CÓDIGO. .........................................................................................................- 43 FASE DE LA PORTADORA. ............................................................................................................................- 44 MENSAJE DE NAVEGACIÓN (NAV DATA) .................................................................................................- 44 FUENTES DE ERROR.......................................................................................................................................- 44 INTRODUCCIÓN ..............................................................................................................................................- 44 ERRORES EN LAS POSICIONES DE LOS SATÉLITES ................................................................................- 45 ERROR DEL RELOJ DEL SATÉLITE. .............................................................................................................- 46 ERRORES ASOCIADOS AL MEDIO EN EL QUE SE PROPAGA LA SEÑAL. .............................................- 46 ERRORES ASOCIADOS AL EFECTO DE CAMINO MÚLTIPLE (MULTIPATH). ..........................................- 47 ERRORES ASOCIADOS A LA MEDIDA DEL RECEPTOR. ..........................................................................- 47 DISPONIBILIDAD SELECTIVA ......................................................................................................................- 48 DGPS (GPS DIFERENCIAL) ..................................................................................................................................- 48 ESTRUCTURA DEL DGPS...............................................................................................................................- 49 PRINCIPIOS DE FUNCIONAMIENTO DEL DGPS ........................................................................................- 49 COBERTURA Y PRECISIÓN DEL DGPS........................................................................................................- 51 ERRORES DEL DGPS .......................................................................................................................................- 51 -
CAPITULO 4 ...................................................................................................................................................................... - 51 GLONASS (GLOBAL ORBITING NAVIGATION SATELLITE SYSTEM) ............................................................. - 52 4.1.
4.2.
4.3.
4.3.1.
4.4.
4.4.1.
4.1.1.1.1.
4.1.1.1.2.
4.1.1.1.3.
4.1.1.1.4.
4.4.2.
4.4.3.
4.5.
4.6.
4.7.
4.8.
4.9.
4.9.1.
INTRODUCCION ..............................................................................................................................................- 52 HISTORIA..........................................................................................................................................................- 52 CARACTERÍSTICAS DEL SISTEMA ..............................................................................................................- 53 PLAN DE RENOVACIÓN.................................................................................................................................- 53 COMPOSICIÓN DEL SISTEMA ......................................................................................................................- 54 SEGMENTO ESPACIAL ...................................................................................................................................- 54 SATÉLITES GLONASS ....................................................................................................................................- 55 BLOQUE I DE SATÉLITES ......................................................................................................................................- 56 BLOQUE II DE SATÉLITES .....................................................................................................................................- 56 COMPOSICIÓN DE LA CONSTELACIÓN GLONASS PARA 13-02-2012. ...................................................- 62 SEGMENTO DE CONTROL .............................................................................................................................- 62 SEGMENTO USUARIO ....................................................................................................................................- 64 SISTEMA DE REFERENCIA: DATUM PZ-90.................................................................................................- 64 FUNCIONAMIENTO DE GLONASS ...............................................................................................................- 65 SISTEMAS DE TIEMPO GLONASS ................................................................................................................- 65 CÓDIGOS DEL SISTEMA GLONASS .............................................................................................................- 66 ERRORES DEL SISTEMA GLONASS .............................................................................................................- 66 ERROR IONOSFÉRICO. ...................................................................................................................................- 66 - 185 -
4.9.2.
4.9.3.
4.9.4.
4.9.5.
4.9.6.
4.9.7.
4.10.
ERROR ATMOSFÉRICO. .................................................................................................................................- 66 DISPONIBILIDAD SELECTIVA. .....................................................................................................................- 66 ERROR DEL RECEPTOR. ................................................................................................................................- 67 ERROR DE EFEMÉRIDES (POSICIÓN) DEL SATÉLITE. .............................................................................- 68 DILUCIÓN DE PRECISIÓN (DOP) POR POSICIÓN.......................................................................................- 68 ERROR DE MULTITRAYECTORIA. (MULTIPATH). ...................................................................................- 68 GLONASS DIFERENCIAL ...............................................................................................................................- 68 -
CAPITULO 5 ...................................................................................................................................................................... - 70 FUTUROS SISTEMAS DE POSICIONAMIETO GLOBAL ........................................................................................ - 70 5.1.
5.1.1.
5.1.2.
5.1.2.1.
5.1.2.2.
5.1.2.3.
5.1.3.
5.1.3.1.
5.1.3.1.1.
5.1.3.1.2.
5.1.3.1.2.1.
5.1.3.1.2.2.
5.1.3.1.2.3.
5.1.3.1.3.
5.1.3.2.
5.1.3.2.1.
5.1.4.
5.1.5.
5.1.6.
5.2.
5.3.
5.3.1.
5.4.
5.4.1.
GALILEO ...........................................................................................................................................................- 70 HISTORIA..........................................................................................................................................................- 70 DESARROLLO DEL SISTEMA........................................................................................................................- 71 DEFINICIÓN DEL SISTEMA (1999-2002) ......................................................................................................- 71 DESARROLLO DEL SISTEMA (2002-2013) ...................................................................................................- 71 FUNCIONAMIENTO Y EXPLOTACIÓN COMERCIAL DEL MISMO (2013-EN ADELANTE) .................- 72 COMPOSICIÓN DEL SISTEMA ......................................................................................................................- 72 SEGMENTO ESPACIAL ...................................................................................................................................- 72 ACTUALIDAD DEL SISTEMA ........................................................................................................................- 73 SATÉLITES GALILEO .....................................................................................................................................- 74 SATÉLITE GIOVE-A (GALILEO IN ORBIT VALIDATION ELEMENT) .....................................................................- 74 SATÉLITE GIOVE-B ........................................................................................................................................- 74 SATÉLITE GIOVE-A2 ......................................................................................................................................- 74 ESTUDIO TÉCNICO DEL SEGMENTO ESPACIAL ......................................................................................- 74 SEGMENTO CONTROL ...................................................................................................................................- 75 COMPONENTE GLOBAL ................................................................................................................................- 75 SERVICIOS GALILEO......................................................................................................................................- 76 DEFINICIÓN DEL INTERFAZ .........................................................................................................................- 76 ESTRUCTURA DE LA SEÑAL DE NAVEGACIÓN .......................................................................................- 77 BEIDOU (COMPASS) ........................................................................................................................................- 78 IRNSS .................................................................................................................................................................- 79 DETALLES TÉCNICOS ....................................................................................................................................- 80 QZSS ..................................................................................................................................................................- 80 SERVICIOS DEL QZSS.....................................................................................................................................- 81 -
CAPITULO 6 ...................................................................................................................................................................... - 82 GEODESIA SATELITAL ................................................................................................................................................. - 82 6.1.
6.2.
6.3.
6.4.
6.4.1.
6.4.2.
6.5.
6.5.1.
6.5.2.
6.6.
INTRODUCCIÓN: .............................................................................................................................................- 82 RESEÑA HISTÓRICA .......................................................................................................................................- 82 ASPECTOS CONCEPTUALES BÁSICOS .......................................................................................................- 84 SUPERFICIES DE REFERENCIA ....................................................................................................................- 85 GEOIDE .............................................................................................................................................................- 85 ELIPSOIDE DE REVOLUCIÓN .......................................................................................................................- 87 GEODESIA CLÁSICA ......................................................................................................................................- 89 LEVANTAMIENTO GEODÉSICO ...................................................................................................................- 89 ASIGNACIÓN DE COORDENADAS DEL ORIGEN P (B, L, H) .....................................................................- 89 GEODESIA SATELITAL ..................................................................................................................................- 90 -
CAPITULO 7 ...................................................................................................................................................................... - 91 SISTEMAS Y MARCOS DE REFERENCIA GEODÉSICO PARA LA REPÚBLICA ARGENTINA ..................... - 91 7.1.
7.2.
7.3.
7.3.1.
7.3.1.1.
7.3.1.2.
7.3.1.2.1.
7.3.1.2.2.
7.4.
7.4.1.
7.4.1.1.
INTRODUCCION ..............................................................................................................................................- 91 SISTEMA DE REFERENCIA LOCAL ..............................................................................................................- 91 SISTEMA DE REFERENCIA GEODESICO ....................................................................................................- 92 MARCOS DE REFERENCIAS GEODESICOS ................................................................................................- 94 CAMPO INCHAUSPE 1969 ..............................................................................................................................- 95 MARCOS POSTERIORES A CAMPO INCHAUSPE 69 ..................................................................................- 97 SAD 69 (SOUTH AMERICAN DATUM 1969) .........................................................................................................- 97 LA RED DOPPLER............................................................................................................................................- 98 SISTEMAS DE REFERENCIA GEOCENTRICOS...........................................................................................- 98 SISTEMA WGS ´84 ...........................................................................................................................................- 99 DEFINICIÓN ...................................................................................................................................................- 100 - 186 -
7.4.1.2.
7.4.1.3.
7.4.2.
7.4.3.
7.4.3.1.
7.4.3.1.1.
7.4.3.1.2.
7.4.3.2.
7.4.3.2.1.
7.4.3.2.2.
7.4.3.2.3.
7.4.3.2.4.
7.4.3.2.5.
7.4.3.3.
7.4.3.4.
RELACIÓN DE WGS 84 CON OTROS SISTEMAS GEOCÉNTRICOS Y CON SISTEMAS ..............................
LOCALES ........................................................................................................................................................- 100 ACTUALIZACIONES DEL SISTEMA ...........................................................................................................- 100 SISTEMA DE REFERENCIA. DATUM PZ 90 ...............................................................................................- 101 EL SISTEMA TERRESTRE INTERNACIONAL ...........................................................................................- 101 MARCOS DE REFERENCIAS GEOCENTRICOS .........................................................................................- 102 SISTEMA ITRF ................................................................................................................................................- 102 TECNICAS DE OBSERVACION....................................................................................................................- 103 SISTEMA POSGAR (POSICIONES GEODÉSICAS ARGENTINAS) ..........................................................................- 105 POSGAR 94 Y POSGAR 98 .............................................................................................................................- 106 LAS DIFERENCIAS 94-98 Y SUS CONSECUENCIAS.................................................................................- 108 DIFERENCIAS EN LA COORDENADAS GEOCÉNTRICAS ......................................................................- 108 DIFERENCIA EN LAS COORDENADAS RELATIVAS...............................................................................- 109 INFLUENCIA DE LAS DIFERENCIAS SOBRE LEVANTAMIENTOS DE DISTINTAS EXTENSIONES .........
GEOGRÁFICAS..............................................................................................................................................- 109 CONCLUSIONES ............................................................................................................................................- 110 NUEVO MARCO DE REFERENCIA PARA LA REPUBLICA ARGENTINA .............................................- 111 -
CAPITULO 8 .................................................................................................................................................................... - 113 TRANSFORMACIÓN Y CONVERSIÓN DE COORDENADAS ............................................................................... - 113 8.1.
COORDENADAS ELIPSOIDALES A CARTESIANAS ................................................................................- 114 8.1.1.
CONVERSIÓN DE COORDENADAS ELIPSÓIDICAS (WGS ‘84) A CARTESIANAS (WGS ‘84) ............- 114 8.1.2.
TRANSFORMACIÓN DE COORDENADAS CARTESIANAS (WGS ‘84) A CARTESIANAS (CAMPO
INCHAUSPE ‘69) ...........................................................................................................................................................- 115 8.2.
COORDENADAS CARTESIANAS A ELIPSOIDALES ................................................................................- 115 8.2.1.
MÉTODO ITERATIVO ...................................................................................................................................- 115 8.2.2.
MÉTODO SIMPLE (NO ITERATIVO) ...........................................................................................................- 117 8.3.
COORDENADAS ELIPSOIDALES (WGS 84) A COORDENADAS PLANAS (GAUSS KRÜGER) ...............- 117 8.4.
COORDENADAS PLANAS (GAUSS KRÜGER) A COORDENADAS ELIPSOIDALES (WGS 84) .............- 119 8.5.
TRANSFORMACIONES DE ALTURA. CONCEPTOS PRELIMINARES ...................................................- 120 8.6.
TRANSFORMACIONES DE DATUM ...........................................................................................................- 121 8.6.1.
CLASIFICACIÓN DE DATUM ......................................................................................................................- 121 8.6.1.1.
DATUM GEODÉSICO, CONCEPTOS PREVIOS. .........................................................................................- 121 8.6.1.2.
DATUM GEODÉSICO VERTICAL. ...............................................................................................................- 121 8.6.1.3.
DATUM GEODÉSICO HORIZONTAL. .........................................................................................................- 122 8.6.2.
CLASIFICAR LAS TRANSFORMACIONES SEGÚN ESTAS AFECTEN A UNA, DOS O ..................................
TRES DIMENSIONES. ....................................................................................................................................- 122 8.6.2.1.
TRANSFORMACIÓN DE HELMERT............................................................................................................- 122 8.6.2.2.
TRANSFORMACIÓN DE AFINIDAD O DE 7 PARÁMETROS ...................................................................- 124 8.7.
ESTABLECIMIENTO DE UN SISTEMA LOCAL .........................................................................................- 124 8.8.
ESTABLECIMIENTO DE UN SISTEMA GLOBAL ......................................................................................- 125 8.9.
PLANTEAMIENTO DEL PROBLEMA ..........................................................................................................- 125 8.9.1.
MODELO DE 7 PARÁMETROS DE BURSA-WOLF ....................................................................................- 126 8.9.2.
MODELO DE 3 PARÁMETROS .....................................................................................................................- 126 8.9.3.
FÓRMULA ESTÁNDAR DE MOLODENSKY ..............................................................................................- 126 CAPITULO 9 .................................................................................................................................................................... - 128 POSICIONAMIENTOS GNSS........................................................................................................................................ - 128 9.1.
9.1.1.
9.1.2.
9.1.3.
9.2.
9.2.1.
9.2.1.1.
9.2.1.2.
9.2.1.3.
9.2.1.4.
9.2.2.
9.2.2.1.
9.2.2.2.
ASPECTOS DEL POSICIONAMIENTO ........................................................................................................- 128 EL POSICIONAMIENTO ABSOLUTO FRENTE AL RELATIVO ...............................................................- 128 EL POSICIONAMIENTO ESTÁTICO FRENTE AL CINEMÁTICO ............................................................- 129 EL POSICIONAMIENTO EN TIEMPO REAL FRENTE AL POST-PROCESO............................................- 129 TIPOS DE POSICIONAMIENTO....................................................................................................................- 129 ABSOLUTO .....................................................................................................................................................- 129 ESTÁTICO EN TIEMPO REAL ......................................................................................................................- 129 ESTÁTICO CON POST-PROCESO ................................................................................................................- 131 CINEMÁTICO EN TIEMPO REAL ................................................................................................................- 131 CINEMÁTICO CON POST-PROCESO ..........................................................................................................- 132 RELATIVOS ....................................................................................................................................................- 132 ESTÁTICO EN TIEMPO REAL ......................................................................................................................- 132 ESTÁTICO CON POST-PROCESO ................................................................................................................- 132 - 187 -
9.2.2.2.1.
9.2.2.2.2.
9.2.2.2.3.
9.2.2.3.
9.2.2.4.
9.2.2.4.1.
9.2.2.4.2.
ESTÁTICO CONVENCIONAL.......................................................................................................................- 133 ESTÁTICO RÁPIDO .......................................................................................................................................- 134 REOCUPACIÓN ..............................................................................................................................................- 135 CINEMÁTICO EN TIEMPO REAL ................................................................................................................- 136 CINEMÁTICO CON POST-PROCESO ..........................................................................................................- 137 STOP AND GO ................................................................................................................................................- 137 PSEUDO-CINEMÁTICO ................................................................................................................................- 137 -
CAPITULO 10 .................................................................................................................................................................. - 138 USO COMBINADO DE LOS SISTEMAS GPS Y GLONASS. ................................................................................... - 139 10.1.
10.2.
10.2.1.
10.2.2.
10.2.3.
10.3.
10.4.
10.4.1.
10.4.2.
10.4.3.
10.5.
10.6.
INTRODUCCIÓN. ...........................................................................................................................................- 139 ESTUDIOS REALIZADOS SOBRE LA UTILIZACIÓN DE AMBOS SISTEMAS Y SU USO .............................
COMBINADO..................................................................................................................................................- 139 POSICIONES ESTIMADAS CON GLONASS: ..............................................................................................- 139 POSICIONES ESTIMADAS CON GPS: .........................................................................................................- 139 POSICIONES ESTIMADAS CON LA COMBINACIÓN GPS/GLONASS:...................................................- 140 OBTENCIÓN DE LOS PARÁMETROS DE TRANSFORMACIÓN ENTRE PZ-90 Y WGS-84. ..................- 140 VENTAJAS DEL SISTEMA GPS + GLONASS..............................................................................................- 142 DISPONIBILIDAD ..........................................................................................................................................- 142 CONFIABILIDAD ...........................................................................................................................................- 142 PRECISIÓN......................................................................................................................................................- 143 GPS VS GLONASS ...........................................................................................................................................- 143 USO DEL GPS Y EL GLONASS CONJUNTAMENTE ..................................................................................- 144 -
CAPITULO 11 .................................................................................................................................................................. - 145 PRACTICAS DE CAMPO ................................................................................................................................................- 145 11.1.
INTRODUCCIÓN ............................................................................................................................................- 145 11.2.
EQUIPAMIENTO UTILIZADO ......................................................................................................................- 146 11.2.1.
ESPECIFICACIONES DEL GRX1 ..................................................................................................................- 146 11.4.
SISTEMA DE APOYO UNIVERDIDAD NACIONAL DE CORDOBA ........................................................- 148 11.4.1.
ANALISIS PLANIMETRICO SOBRE VALORES OBTENIDOS POR GNSS Y GPS...................................- 161 11.4.1.1. LONGITUDES LINEALES DE 1 GRADO EN LATITUD Y LONGITUD ....................................................- 164 11.4.1.2. ANALISIS DE VECTORES.............................................................................................................................- 168 11.4.2.
ANALISIS ESTATICO RAPIDO VS STOP AND GO EN GNSS ....................................................................- 172 11.5.
ANALISIS ALTIMENTRICO - RED DE NIVELACIÓN ALTIMETRICA....................................................- 175 11.5.1.
ANÁLISIS COMPARATIVO DE DESNIVELES EMPLEANDO ALTURAS ELIPOSIDALES (WGS84). .- 176 11.5.2.
VENTAJAS GNSS CON RESPECTO A GPS PERCIBIDA EN CAMPAÑA. ................................................- 180 -
- 188 -
INDICE DE FIGURAS
Figura 2.1: Esquema GNSS ............................................................................................................................. - 18 Figura 3.2: Segmento Control GPS. ................................................................................................................. - 38 Figura 3.3: Estaciones del Segmento de Control ............................................................................................. - 39 Figura 3.4: Estaciones del Segmento de Control ............................................................................................. - 40 Figura 3.5: Tiempo GPS................................................................................................................................... - 41 Figura 3.6: GDOP pobre……………………………………………………………………………………...- 42 Figura 3.7: GDOP bueno .................................................................................................................................. - 45 Figura 3.8: Errores de la señal por Ionosfera y Troposfera. ............................................................................. - 46 Figura 3.9: Errores de la señal por Multipath................................................................................................... - 47 Figura 3.10: Disponibilidad Selectiva. ............................................................................................................. - 48 Figura 3.10: DGPS ........................................................................................................................................... - 50 Figura 4.1: Composición del Sistema GLONASS ........................................................................................... - 54 Figura 4.2: Constelación GLONASS ............................................................................................................... - 55 Figura 4.3: Tipos de Satélites GLONASS........................................................................................................ - 62 Figura 4.4: Segmento de Control del Sistema GLONASS............................................................................... - 63 Figura 4.5: Distorsión horizontal, en la medición de una posición. ................................................................. - 67 Figura 4.6: Distorsión vertical, en la medición de una posición. ..................................................................... - 67 Figura 5.1: Miembros de la Unión Europea ..................................................................................................... - 70 Figura 5.2: Composición del Sistema GALILEO ............................................................................................ - 72 Figura 5.3: Constelación GALILEO ................................................................................................................ - 73 Figura 5.4: Lanzamiento de satélite Galileo-IOV PFM y Galileo-IOV FM2 .................................................. - 73 Figura 5.5: Señal de Navegación GALILEO ................................................................................................... - 77 Figura 5.6: Constelación COMPASS ............................................................................................................... - 79 Figura 5.7: Sistema regional IRNSS ................................................................................................................ - 80 Figura 5.8: Sistema Satelital QZSS .................................................................................................................. - 81 Figura 6.1: Calculo de la circunferencia de la Tierra según Eratóstenes ......................................................... - 83 Figura 6.2: Diferentes pensamientos de la forma de la Tierra ......................................................................... - 84 Figura 6.3: Medición de distancia: Triangulación, Invar, Electrónica. ............................................................ - 84 Figura 6.4: Coordenadas Cartesianas. .............................................................................................................. - 85 Figura 6.5: Fuerzas de la Gravedad. ................................................................................................................. - 86 Figura 6.6: Geoide. ........................................................................................................................................... - 87 Figura 6.7: Elipsoide. ....................................................................................................................................... - 87 Figura 6.8: Comparación Elipsoide-Geoide ..................................................................................................... - 88 Figura 6.9: Coordenadas Elipsóidicas. ............................................................................................................. - 88 Figura 7.1: Sistema de Referencia Topocéntrico ............................................................................................. - 92 Figura 7.2: Levantamiento Polar del sistema topocéntrico. ............................................................................. - 92 Figura 7.3: Sistema de Referencia Geocéntrico. .............................................................................................. - 93 Figura 7.4: Desviación relativa de la vertical. .................................................................................................. - 93 Figura 7.5: Mojón Campo Inchauspe. .............................................................................................................. - 96 Figura 7.6: Marco de referencia Campo Inchauspe 69..................................................................................... - 96 Figura 7.7: Sistema de Referencia Geocéntrico. .............................................................................................. - 99 Figura 7.8: WGS 84. ........................................................................................................................................ - 99 Figura 7.9: ITRS. ............................................................................................................................................ - 102 Figura 7.10: Red de Estaciones VLBI del IVS, año 2008. ............................................................................. - 103 Figura 7.11: Red de estaciones SLR del IRLS. .............................................................................................. - 104 Figura 7.12: Estaciones GNSS de la red IGS, en su mayoría son estaciones GPS. ....................................... - 104 Figura 7.13: Red global de balizas DORIS. .................................................................................................. - 105 Figura 7.14: Red de puntos POSGAR 94. ...................................................................................................... - 107 Figura 7.15: diferencias 94-98 en las coordenadas geocéntricas (metros) ..................................................... - 109 Figura 7.16: diferencias 94-98 en las coordenadas relativas entre pares de puntos (metros). ........................ - 109 Figura 7.17: desviación estándar (centímetros) de los residuos de una transformación de igualdad
entre distintas redes y los marcos POSGAR 94 y 98; se indica también el cociente 94/98. .......................... - 110 Figura 7.18: Marco Ramsac-POSGAR 07 ..................................................................................................... - 112 - 189 -
Figura 8.1: Transformación y Conversión de Coordenadas ........................................................................... - 113 Figura 8.2: Coordenadas Elipsoidales a Cartesianas ...................................................................................... - 114 Figura 8.3: Transformación de Altura ............................................................................................................ - 121 Figura 8.4 Transformación de Helmert .......................................................................................................... - 123 Figura 9.1: Tipos de Posicionamientos .......................................................................................................... - 130 Figura 9.2: Posicionamientos Absoluto ......................................................................................................... - 131 Figura 9.3: Absoluto: Estático Post-Proceso .................................................................................................. - 131 Figura 9.4: Absoluto: Cinemático tiempo real ............................................................................................... - 132 Figura 9.5 Relativo: Estático Convencional ................................................................................................... - 133 Figura 9.6: Relativo: Estático Rápido ............................................................................................................ - 134 Figura 9.7: Relativo: RTK.............................................................................................................................. - 136 Figura 10.1: Estaciones de seguimiento para el cálculo de las órbitas de los satélites GLONASS en WGS-84.
................................................................................................................................
- 141 Figura 10.2. Transformación de coordenadas de PZ-90 a WGS-84............................................................... - 142 Figura 10.3: Visibilidad Satélites GPS/GLONASS ....................................................................................... - 144 Figura 10.4: Visibilidad Satélites GPS ........................................................................................................... - 144 Figura 10.5: PDOP GPS (32 satélites) ........................................................................................................... - 145 Figura 10.6: Mejoramiento de PDOP. ............................................................................................................ - 145 Figura 11.1: Equipos de trabajo ..................................................................................................................... - 146 Figura 11.2: Software de trabajo .................................................................................................................... - 147 Figura 11.3: Vectores del día 05-10-11 .......................................................................................................... - 149 Figura 11.4: Ciudad Universitaria de la Ciudad de Córdoba ......................................................................... - 150 Figura 11.5: Punto L (Punto Pato)…………………………………………………………………………..- 148 Figura 11.6: Punto pf3.................................................................................................................................... - 151 Figura 11.7: Vectores del día 12-10-11 .......................................................................................................... - 152 Figura 11.8: Punto 41 ..................................................................................................................................... - 153 Figura 11.10: Corte de UCOR que influyó el post-proceso de puntos 2 y 3 .................................................. - 154 Figura 11.11: Vectores día 25-10-11.............................................................................................................. - 155 Figura 11.12: Vectores y recorrido día 04-11-11 ........................................................................................... - 156 Figura 11.13: Punto J ..................................................................................................................................... - 157 Figura 11.14: Vectores día 08-12-11.............................................................................................................. - 158 Figura 11.15: Vectores dia 08-12-11 – Stop and Go ...................................................................................... - 160 Figura 11.16: Vectores y recorrido día 08-12-11 – Dinámicos ...................................................................... - 161 Figura 11.17: Configuración del software de post-proceso............................................................................ - 161 Figura 11.18: Gráfico de la totalidad de los datos .......................................................................................... - 167 Figura 11.20: Gráfico de datos filtrados......................................................................................................... - 168 Figura 11.21: Análisis de Vectores Ciudad Universitaria .............................................................................. - 169 Figura 11.21: Gráfico de datos Estático vs. SAG........................................................................................... - 173 Figura 11.22: Grafico de datos Estático vs. SAG filtrados ............................................................................ - 174 Figura 11.24: Desniveles comparados con nivelación geométrica ................................................................ - 177 Figura 11.25: Gráfico de ∆N .......................................................................................................................... - 179 Figura 11.27: Cinemático sin pérdida de señal. ............................................................................................. - 181 -
- 190 -
INDICE DE TABLAS
Tabla 3.1: Satélites Bloque I GPS ................................................................................................................... - 29 Tabla 3.2: Satélites Bloque II GPS .................................................................................................................. - 30 Tabla 3.3: Satélites Bloque II-A GPS ............................................................................................................. - 31 Tabla 3.4: Satélites Bloque II-R GPS ............................................................................................................... - 32 Tabla 3.5: Satélites Bloque IIR-M GPS .......................................................................................................... - 33 Tabla 3.6: Satélites Bloque II-F GPS .............................................................................................................. - 33 Tabla 3.7: Satélites Bloque III GPS ................................................................................................................. - 34 Tabla 3.8: Tipos de Reloj Atómicos................................................................................................................. - 35 Tabla 3.9: Frecuencias Fundamental GPS ....................................................................................................... - 36 Tabla 3.10: Ejemplo de tiempo GPS ................................................................................................................ - 41 Tabla 3.11: Efemérides Transmitidas............................................................................................................... - 42 Tabla 3.12: Magnitud de los Errores ................................................................................................................ - 51 Tabla 4.1: Planos del Sistema GLONASS ....................................................................................................... - 55 Tabla 4.2: Características de satélites GLONASS ........................................................................................... - 57 Tabla 4.3: Todos los satélites GLONASS ........................................................................................................ - 60 Tabla 4.4: Satélites actualmente operativos ..................................................................................................... - 62 Tabla 4.5: Resumen de Satélites ...................................................................................................................... - 62 Tabla 4.6: Parámetros de PZ 90 ....................................................................................................................... - 64 Tabla 5.1: Características de la señal GALILEO ............................................................................................. - 77 Tabla 7.1: Tipos de Elipsoides I ....................................................................................................................... - 94 Tabla 7.2: Tipos de Elipsoides II ..................................................................................................................... - 94 Tabla 7.3: Marcos de referencia Nacionales .................................................................................................... - 95 Tabla 7.4 Constantes WGS 84 ....................................................................................................................... - 100 Tabla 7.5: Constantes PZ 90 .......................................................................................................................... - 101 Tabla 8.1: Parámetros Elipsoidales ................................................................................................................ - 118 Tabla 8.2: Parámetros WGS 84 ...................................................................................................................... - 119 Tabla 8.3: Elipsoide WGS ´84 ....................................................................................................................... - 120 Tabla 9.1: Tipos de Posicionamientos............................................................................................................ - 128 Tabla 9.2: Alcances en los tipos de posicionamientos .................................................................................. - 135 Tabla 10.1: Posiciones GLONASS ................................................................................................................ - 139 Tabla 10.2: Posiciones GPS ........................................................................................................................... - 140 Tabla 10.3: Posiciones GPS/GLONASS ........................................................................................................ - 140 Tabla 10.4: Comparación GPS-GLONASS ................................................................................................... - 143 Tabla 11.1: Datos Estación Permanente UCOR ............................................................................................. - 148 Tabla 11.2: Configuración de Estático Rápido .............................................................................................. - 148 Tabla 11.4: Valores de medición día 05-10-11 (GNSS) ................................................................................ - 149 Tabla 11.4: Valores de medición día 05-10-11 (GPS) ................................................................................... - 151 Tabla 11.5: Configuración de Estático Rápido .............................................................................................. - 153 Tabla 11.6: Valores de medición día 25-10-11 (GNSS) ................................................................................ - 155 Tabla 11.8: Configuración Estático Rápido…………………………………………………………………- 154 Tabla 11.9: Configuración Stop and Go......................................................................................................... - 157 Tabla 11.101: Valores de medición día 08-12-11 – Estático Rápido ............................................................. - 158 Tabla 11.11: Características de medición día 08-12-11 ................................................................................. - 159 Tabla 11.12: Valores de medición día 08-12-11 – Stop and Go .................................................................... - 159 Tabla 11.13: Características de medición día 08-12-11 ................................................................................. - 159 Tabla 11.14: Configuración Dinámico ........................................................................................................... - 160 Tabla 11.15: Resumen de valores de Dinámicos día 08-12-12 ...................................................................... - 160 Tabla 11.16: Resumen de valores en Estático Ciudad Universitaria.............................................................. - 162 Figura 11.18: Sokkia Stratus - Características ............................................................................................... - 162 Tabla 11.17: Resumen de valores GPS año 2011en Estático Ciudad Universitaria....................................... - 163 Tabla 11.18: Comparación valores GNSS/GPS ............................................................................................. - 163 Tabla 11.20: Calculo de variación de segundos……………………………………………………………..- 160 Tabla 11.21: EMC total de todas las muestras. .............................................................................................. - 167 Tabla 11.22: EMC de datos filtrados.............................................................................................................. - 168 - 191 -
Tabla 11.26: Datos para el análisis Estático vs. SAG .................................................................................... - 172 Tabla 11.27: Variación de segundos Estático vs. SAG……………………………………………………...- 170 Tabla 11.28: EMC Estático vs. SAG.............................................................................................................. - 173 Tabla 11.29: EMC de datos filtrados Estático vs. SAG ................................................................................. - 174 Tabla 11.30: Valores de medición día 16-11-11 – Estático Rápido ............................................................... - 176 Tabla 11.31: Valores de Nivelación Geométrica ........................................................................................... - 176 Tabla 11.32: Análisis de EMC con valores de altura elipsoidal..................................................................... - 177 Tabla 11.33: Diferencias entre alturas elipsoidales ........................................................................................ - 178 Tabla 11.34: Análisis de EMC con valores de ∆N ......................................................................................... - 178 Tabla 11.35: Diferencias entre alturas elipsoidales ........................................................................................ - 179 Tabla 11.36: Diferencias entre PDOP/Satélites entre ambos sistemas........................................................... - 180 -
- 192 -