Informe - Escuela de Ingeniería Eléctrica
Anuncio

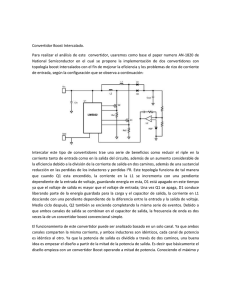
Universidad de Costa Rica Facultad de Ingeniería Escuela de Ingeniería Eléctrica IE – 0502 Proyecto Eléctrico VALIDACIÓN EXPERIMENTAL DE MODELOS MATEMÁTICOS PARA CONVERTIDORES CONMUTADOS DE ALTA FRECUENCIA Por: ANDREA ROJAS BARRANTES Ciudad Universitaria Rodrigo Facio Diciembre del 2008 VALIDACIÓN EXPERIMENTAL DE MODELOS MATEMÁTICOS PARA CONVERTIDORES CONMUTADOS DE ALTA FRECUENCIA Por: ANDREA ROJAS BARRANTES Sometido a la Escuela de Ingeniería Eléctrica de la Facultad de Ingeniería de la Universidad de Costa Rica como requisito parcial para optar por el grado de: BACHILLER EN INGENIERÍA ELÉCTRICA Aprobado por el Tribunal: _________________________________ Ing. Geovanny Delgado Cascante Profesor Guía _________________________________ Ing. Jorge Romero Chacón Profesor lector _________________________________ Ing. Rodrigo García León Profesor lector ii A mi familia, a mi novio y a mis amigas y amigos. iii RECONOCIMIENTOS Le agradezco a Dios por permitirme llegar hasta donde estoy hoy. Agradezco también a mi familia por todo el apoyo y amor que me han brindado toda mi vida. De igual forma agradezco a mi novio, por ser tan especial y por todo su apoyo y ayuda en la realización de este documento. Finalmente, agradezco mucho a mi profesor guía, Ing. Geovanny Delgado, por su disposición, orientación y colaboración en la realización de este proyecto. También agradezco a los profesores lectores, Ing. Jorge Romero e Ing. Rodrigo García, por su participación. iv ÍNDICE GENERAL ÍNDICE DE FIGURAS ............................................................................... VII ÍNDICE DE TABLAS ................................................................................... IX NOMENCLATURA ........................................................................................X RESUMEN ..................................................................................................... XI CAPÍTULO 1. INTRODUCCIÓN .............................................................. 1 1.1 Objetivos ................................................................................................................ 1 1.1.1 Objetivo General .......................................................................................... 1 1.1.2 Objetivos Específicos.................................................................................... 2 1.2 Metodología............................................................................................................ 2 CAPÍTULO 2. DESARROLLO TEÓRICO .............................................. 4 2.1 Modelo en Modo de Operación Continua. .......................................................... 6 2.1.1 Convertidor Step Down (Buck o reductor)................................................ 6 2.1.1.1 Topología .................................................................................................... 6 2.2 2.1.1.2 Formas de onda ........................................................................................... 7 2.1.1.3 Relaciones terminales.................................................................................. 9 2.1.1.4 Diseño del convertidor (criterios para selección de componentes)........... 11 Modelo en Modo de Operación Discontinua..................................................... 18 2.2.1 Convertidor Step Down (Buck o reductor).............................................. 18 2.2.1.1 Topología .................................................................................................. 18 2.2.1.2 Formas de onda ......................................................................................... 19 2.2.1.3 Relaciones terminales................................................................................ 21 2.2.1.4 Diseño del convertidor (criterios para selección de componentes)........... 22 v CAPÍTULO 3. COMPROBACIONES EXPERIMENTALES............... 27 3.1 Modelo en Modo de Operación Continua ......................................................... 27 3.1.1 Convertidor Step Down (Buck o reductor).............................................. 27 3.1.1.1 Especificaciones de diseño........................................................................ 27 3.2 3.1.1.2 Diseño del circuito .................................................................................... 27 3.1.1.3 Diagrama esquemático final...................................................................... 34 3.1.1.4 Procedimiento del experimento................................................................. 34 3.1.1.5 Resultados Experimentales ....................................................................... 37 Modelo en Modo de Operación Discontinua..................................................... 45 3.2.1 Convertidor Step Down (Buck o reductor).............................................. 45 3.2.1.1 Especificaciones de diseño........................................................................ 45 3.2.1.2 Diseño del circuito .................................................................................... 45 3.2.1.3 Procedimiento del experimento................................................................. 51 3.2.1.4 Resultados Experimentales ....................................................................... 54 CAPÍTULO 4. CONCLUSIONES Y RECOMENDACIONES ............. 61 4.1 CONCLUSIONES............................................................................................... 61 4.2 RECOMENDACIONES..................................................................................... 63 BIBLIOGRAFIA ........................................................................................... 64 ANEXO A ....................................................................................................... 66 ANEXO B ....................................................................................................... 80 ANEXO C ....................................................................................................... 81 ANEXO D ....................................................................................................... 82 vi ÍNDICE DE FIGURAS Figura Nº 2.1 Diagrama de bloques general de una fuente conmutada ................................. 4 Figura Nº 2.2 Topología del convertidor Step Down............................................................. 6 Figura Nº 2.3 Formas de onda de la corriente en modo continuo .......................................... 7 Figura Nº 2.4 Forma de onda de la corriente en el inductor ................................................ 13 Figura Nº 2.5 Forma de onda de la corriente en el inductor, cuando I O = I O , min ................. 14 Figura Nº 2.6 Forma de onda de la corriente en el inductor ................................................ 15 Figura Nº 2.7 Compensación ESR ........................................................................................ 16 Figura Nº 2.8 Topología del convertidor Step Down........................................................... 18 Figura Nº 2.9 Formas de onda de la corriente en modo discontinuo ................................... 19 Figura Nº 2.10 Forma de onda de la corriente en el inductor .............................................. 24 Figura Nº 3.1 Determinación de RT y CT ............................................................................ 32 Figura Nº 3.2 Circuito del amplificador de error .................................................................. 32 Figura Nº 3.3 Circuito convertidor Step Down.................................................................... 34 Figura Nº 3.4 Salida del PWM .............................................................................................. 37 Figura Nº 3.5 Forma de onda del voltaje en el diodo............................................................ 38 Figura Nº 3.6 Corriente en el inductor .................................................................................. 39 Figura Nº 3.7 Corriente en el inductor .................................................................................. 41 Figura Nº 3.8 Tensión en la salida ........................................................................................ 42 Figura Nº 3.9 Circuito convertidor Step Down en modo discontinuo ................................. 51 Figura Nº 3.10 Salida del PWM............................................................................................ 54 vii Figura Nº 3.11 Tensión en el inductor .................................................................................. 55 Figura Nº 3.12 Tiempos de operación del inductor............................................................... 56 Figura Nº 3.13 Tensión en el inductor .................................................................................. 57 Figura Nº 3.14 Tensión en la salida ...................................................................................... 58 Figura Nº A.1 Ciclo de encendido (saturación) y apagado (corte) de un transistor............. 67 Figura Nº A.2 Gráfica corriente/voltaje de conmutación para el escenario del mejor caso. 70 Figura Nº A.3 Curvas de corriente y voltaje del ciclo de encendido ................................... 72 Figura Nº A.4 Curvas de corriente y voltaje del ciclo de apagado ...................................... 73 Figura Nº A.5 Gráfica corriente/voltaje de conmutación para el escenario del peor caso... 74 viii ÍNDICE DE TABLAS Tabla 3.1 Lista de equipo para el experimento. ................................................................... 34 Tabla 3.2 Lista de componentes para el experimento. ......................................................... 35 Tabla 3.3. Comparación de parámetros Step Down Continuo .............................................. 44 Tabla 3.4 Lista de equipo para el experimento. ................................................................... 51 Tabla 3.5 Lista de componentes para el experimento. ......................................................... 52 Tabla 3.6 Comparación de parámetros Step Down Discontinuo ......................................... 59 Tabla A.1 Cuadro comparativo para algunos Transistores .................................................. 69 Tabla A.2 Cuadro comparativo de algunas características de diodos Schottky................... 77 ix NOMENCLATURA A Amperio AC Alternating Current (Corriente Alterna) DC Direct Current (Corriente Directa) ESR Equivalent Series Resistance (Resistencia en Serie Equivalente) F Faradio H Henrio Hz Hertz MOSFET Metal Oxide Semiconductor Field Effect Transistor (Transistor semiconductor de Efecto de Campo) PWM Pulse Width Modulation (Modulación por Ancho de Pulso) V Voltio W Watt Ω Ohm x RESUMEN Este proyecto consistió en la validación experimental de los modelos matemáticos de los convertidores conmutados de alta frecuencia, desarrollados para el curso IE-0513, Electrónica III. En el capítulo 2, se llevó a cabo un levantamiento detallado de los modelos matemáticos para convertidores conmutados de alta frecuencia tipo Step-Down, en modo de operación continuo y discontinuo. En el capítulo 3, se definieron las especificaciones de los circuitos a diseñar, se diseñaron y se definió un procedimiento a seguir para verificar el funcionamiento de los mismos. Con los equipos del laboratorio, se implementaron los circuitos para corroborar su funcionamiento. Con los datos obtenidos y los datos de diseño, se hizo la comparación respectiva para validar los modelos estudiados. Finalmente, en el capítulo 4, se exponen las conclusiones y recomendaciones del trabajo. La principal conclusión que se obtuvo, es que se validan experimentalmente de manera satisfactoria, los modelos matemáticos para el convertidor Step Down, en modo de operación continuo y discontinuo. xi CAPÍTULO 1. INTRODUCCIÓN Los convertidores conmutados son sistemas habituales y comunes en nuestro entorno cotidiano. El constante avance de la tecnología utilizada en la mayoría de equipos electrónicos actuales, ha creado la necesidad de tener fuentes de alimentación más sofisticadas y con excelente regulación de tensión. Esto ha hecho indispensable el empleo de convertidores conmutados que garanticen la estabilidad de la tensión que ingrese al equipo. La principal ventaja de los convertidores conmutados es su alta eficiencia, debido a su baja potencia disipada. Lo anterior justifica la importancia del estudio y análisis matemático del funcionamiento de estos convertidores, así como su validación experimental. 1.1 Objetivos 1.1.1 Objetivo General Validar experimentalmente los modelos matemáticos de los convertidores conmutados de alta frecuencia, desarrollados para el curso IE-0513, Electrónica III. 1 2 1.1.2 Objetivos Específicos 1. Realizar un levantamiento detallado de los modelos matemáticos para convertidores conmutados de alta frecuencia tipo Step-Down, Step-Up, Inverter y Flyback en modo de operación continuo y discontinuo. 2. Comprobar experimentalmente el desempeño de modelos matemáticos para los convertidores tipo Step-Down, Step-Up e Inverter en modo de operación continuo. 3. Comprobar experimentalmente el desempeño de modelos matemáticos para los convertidores tipo Step-Down, Step-Up e Inverter en modo de operación discontinuo. 4. Comprobar experimentalmente el desempeño de modelos matemáticos para los convertidores tipo Flyback en modo de operación continuo. 5. Comprobar experimentalmente el desempeño de modelos matemáticos para los convertidores tipo Flyback en modo de operación discontinuo. 1.2 Metodología - Investigación: Se hará un estudio sobre los diferentes componentes que se necesitan para montar los circuitos, para así buscar características deseables y determinar los componentes a utilizar. 3 - Diseño de circuitos: Se definirán especificaciones para el diseño y luego se diseñará un circuito para cumplirlas, así como las especificaciones de los componentes electrónicos a utilizar. Se hará un diseño para cada convertidor en operación continua y discontinua. - Implementación de circuitos: para esto se utilizará el equipo para pruebas de laboratorio, y una protoboard donde se montarán los diferentes circuitos, para realizar las pruebas necesarias para cada convertidor. - Validación de resultados: con los datos obtenidos en la implementación, se hará una validación de los mismos, comparando con los datos del diseño. CAPÍTULO 2. DESARROLLO TEÓRICO 1 2.0 Arquitectura de las Fuentes Conmutadas Al igual que un regulador lineal una fuente conmutada es un circuito electrónico con retroalimentación negativa. El esquema responde a una arquitectura de sistema de control en lazo cerrado de tipo regulador. En la Figura Nº 2.1 aparece un diagrama de bloques general de una fuente conmutada. Figura Nº 2.1 Diagrama de bloques general de una fuente conmutada La primera etapa que se distingue en una fuente conmutada es un convertidor AC/DC, este es un convertidor típico de onda completa en puente con un filtro de salida para asegurar un bajo nivel de rizado. El segundo bloque funcional y objetivo central de análisis en este 1 Este capítulo es desarrollado completamente a partir de la referencia bibliográfica número 1. 4 5 trabajo, es el convertidor DC/DC, éste es un circuito electrónico capaz, como se verá, de disminuir, aumentar o invertir el voltaje DC de entrada. Este circuito es conocido también como convertidor conmutado de alta frecuencia. El tercer bloque funcional es la realimentación acompañada, como es común, de algún tipo de red de compensación para mejorar la respuesta transitoria del lazo de control. Finalmente el control de regulación de la fuente se va a lograr mediante un controlador. Los esquemas más comunes de control utilizan la técnica de control por ancho de pulso conocido típicamente con el acrónico PWM. Los convertidores conmutados se pueden dividir en dos grupos, según su modo de operación, esto es, dependiendo de la continuidad o no de la corriente que circula por el inductor. Cuando la corriente siempre es mayor que cero, durante todo el período de conmutación, el convertidor está en modo de operación continua; y pasa a modo de operación discontinua si durante algún momento la corriente en el inductor llega a ser cero. 6 2.1 Modelo en Modo de Operación Continua. 2.1.1 Convertidor Step Down (Buck o reductor) 2.1.1.1 Topología Figura Nº 2.2 Topología del convertidor Step Down Este es el típico convertidor reductor de voltaje. Si se hace un análisis del mismo en régimen permanente, se observa que al encenderse el transistor un voltaje DC es aplicado al inductor, cuya magnitud es VDC-VO, esto es llamado Ciclo de Carga. El Ciclo de Carga produce que la corriente que circula por el inductor crezca de manera lineal, hasta que se apague el transistor. Cuando el transistor se apaga se produce un voltaje contraelectromotriz en el inductor que encenderá el diodo. Para este ciclo, llamado Ciclo de Descarga, el voltaje aplicado al inductor será de -VO voltios lo que producirá un descenso lineal de la corriente. Para efectos de comodidad en el manejo de los modelos se denota la corriente de inicio del ciclo de carga como I1 y la corriente al final del ciclo de descarga como I2. 7 2.1.1.2 Formas de onda Figura Nº 2.3 Formas de onda de la corriente en modo continuo Como puede verse, durante el Ciclo de Carga, la corriente en el transistor inicia en un valor denominado I1 y crece hasta el valor I2, momento en el que se apaga el transistor. El voltaje contra-electromotriz del inductor enciende el diodo dando inicio al Ciclo de Descarga, el cual inicia en el valor de corriente I2, debido a que es la corriente en un inductor y finaliza al volver a encender el transistor cuando la corriente está en I1 nuevamente. 8 De las formas de onda anteriores, se determinan los valores promedio de las corrientes en cada uno de los componentes del convertidor. Estas expresiones son de suma utilidad, tanto para el dimensionamiento de los mismos, como para la determinación de las relaciones terminales de corriente. Se utilizará la relación: TON = D : ciclo de trabajo , donde T es el período de conmutación T del transistor, y TON es el período de encendido del transistor. El ciclo de trabajo es igual al ciclo de carga del inductor. Corriente promedio en el transistor: La corriente promedio en cualquier componente se obtiene integrando la forma de onda de la variable que se esté analizando, sobre el período de la onda. De esta manera se tiene, para la corriente promedio del transistor: T 1 I Q = ∫ iQ (t ) dt T 0 1 [área bajo la curva] T 1 ⎡T (I + I 2 ) ⎤ I Q = ⎢ ON 1 ⎥ 2 T⎣ ⎦ IQ = ⎛ I1 + I 2 ⎞ ⎟ ⎝ 2 ⎠ ⇒ IQ = D ⋅ ⎜ Corriente promedio en el diodo: Ahora para la corriente en el diodo se integra su forma de onda, obteniéndose: (2.1.1-1) 9 T ID = 1 iD (t ) dt T ∫0 ID = 1 [área bajo la curva] T ID = 1 ⎡ (T − TON )( I1 + I 2 ) ⎤ ⎥ 2 T ⎢⎣ ⎦ ⎛ T − TON ⎞⎛ I 1 + I 2 ⎞ ID = ⎜ ⎟⎜ ⎟ ⎝ T ⎠⎝ 2 ⎠ ⎛I +I ⎞ ⇒ I D = (1 − D)⎜ 1 2 ⎟ ⎝ 2 ⎠ (2.1.1-2) Corriente promedio en el inductor: Finalmente el valor medio para la corriente en el inductor se obtiene como la suma de los valores medios de la corriente en el diodo y en el transistor. I L = IQ + I D ⇒ IL = 2.1.1.3 I1 + I 2 2 (2.1.1-3) Relaciones terminales Para obtener las relaciones terminales del convertidor se utiliza la técnica conocida como Balance voltios-segundos, la cual consiste en determinar la relación de crecimiento de la corriente en el inductor y su razón de decrecimiento. Finalmente estas razones se igualan, 10 por considerarse que el convertidor está en régimen permanente. De ahí se obtienen las relaciones terminales de voltajes. a) Balance Volts-segundo Ciclo de carga del inductor ( Δi L (+) ): T 1 ON 1 ΔiL (+) = ∫VL (t) dt = L 0 L TON ∫ (V DC (t) − VO (t)) dt ⇒ ΔiL (+) = 0 TON (VDC − VO ) L Ciclo de descarga del inductor ( Δi L (−) ): T VO (T − TON ) 1 1 ON = ⇒ Δ − = ( ) ( ) ( ) V t dt V t dt i O L L ∫ L TON L ∫0 L T Δi L (−) = En régimen permanente se requiere que: ΔiL (+) = ΔiL (−) TON (V DC − VO ) VO (T − TON ) = L L ⇒ Vo = V DC ⇒ cancelando L de ambos lados y despejando VO , se obtiene : TON T VO = D⋅VDC Con D < 1 ⇒ VO < VDC b) Relaciones terminales de Corriente En la Figura Nº 2.3 se observa que: I Q = I DC , I L = I O Además, con las ecuaciones (2.1.1-1) y (2.1.1-3), se obtiene la siguiente ecuación: (2.1.1-4) 11 D( I 1 + I 2 ) ⎫ ⎪⎪ 2 ⎬ I1 + I 2 ⎪ IO = I L = ⎪⎭ 2 I DC = I Q = 2.1.1.4 2.1.1.4.1 IO = I DC D (2.1.1-5) Diseño del convertidor (criterios para selección de componentes) Selección paramétrica del Transistor: a) Voltaje reverso máximo (VRM) Cuando el transistor está apagado, el diodo está encendido, por lo que el voltaje reverso del transistor es VDC, entonces: ⇒ VRM > VDC (2.1.1-6) b) Corriente promedio (IQ) I Q = I DC = DI O , MAX ⇒ I Q = DI O , MAX (2.1.1-7) c) Potencia disipada En el Anexo A.1 se detalla el procedimiento para determinar la ecuación que se utilizará para calcular la potencia disipada en el transistor. En el escenario del peor caso: PD , TOTAL (Q) = I M2 RDS (ON ) + 1 f S VOFF I M (t ON + t OFF ) 2 donde I M = I Q = I DC = DI O , MAX , corriente que alcanza el transistor cuando se enciende. 12 VOFF = VDC ⇒ PD , TOTAL (Q) = D 2 I O2 , MAX RDS (ON ) + 2.1.1.4.2 1 f S VDC DI O (t ON + t OFF ) 2 (2.1.1-8) Selección paramétrica del Diodo: a) Voltaje pico reverso (VPR) Cuando el transistor está encendido y el diodo está apagado, en el nodo hay VDC, entonces: V PR > VDC , MAX (2.1.1-9) b) Corriente promedio De las ecuaciones (2.1.1-2) y (2.1.1-3), se tiene: ⎛ I + I2 I D = (1 − D)⎜ 1 ⎝ 2 I + I2 = IO IL = 1 2 ⎞⎫ ⎟⎪ ⎠⎪ ⇒ I = (1 − D) I ⎬ D O ⎪ ⎭⎪ (2.1.1-10) c) Potencia disipada En el Anexo A.2 se detalla el procedimiento para determinar la ecuación que se utilizará para calcular la potencia disipada en el diodo. En el escenario del peor caso: PD , TOTAL ( D) = I M VD + 1 f S VOFF I M (t ON + t OFF ) , 2 donde: I M = (1 − D) I O , VOFF = VDC 13 ⇒ PD , TOTAL ( D) = (1 − D) I OVD + 2.1.1.4.3 1 f S VDC (1 − D) I O (t ON + t OFF ) 2 (2.1.1-11) Selección paramétrica del Inductor: a) Inductancia mínima En operación continua existe un valor Lmin tal que el inductor no se descarga por completo, para la corriente I O , min . Además, I L = I O , min En la Figura Nº 2.4 se observa que se cumple la ecuación (2.1.1-3): I L = I1 + I 2 2 Figura Nº 2.4 Forma de onda de la corriente en el inductor Cuando disminuye I O , todo el ciclo baja, pero mantiene un comportamiento semejante, como se puede observar en la Figura Nº 2.5. 14 Figura Nº 2.5 Forma de onda de la corriente en el inductor, cuando I O = I O , min Se conoce la relación: VL = L ΔiL Δt (2.1.1-12) En el caso extremo, I L = I O , min , I 1 = 0, I 2 = Δi L Además, utilizando la ecuación (2.1.1-3), se despejan las siguientes relaciones: I O ,min = I2 2 ⇒ I 2 = 2 I O ,min = Δi L Si Δt = TON = DT y VL = VDC − VO Sustituyendo todas esas relaciones en la ecuación (2.1.1-12), se tiene: V DC − VO = Lmin (2 I O ,min ) DT , con las igualdades: D = Se obtiene la inductancia mínima: Lmin = VO 1 , T= VDC fS VO (V DC − VO ) 2 I O ,minVDC f S (2.1.1-13) Por último, se escoge una inductancia L, tal que: L > Lmin *Observación: Hay un compromiso entre el tamaño del inductor y la potencia disipada, ya que ambos parámetros se relacionan con la frecuencia: ( L ∝ 1 fS y P ∝ fS ) 15 b) Corriente en el inductor (rms) Figura Nº 2.6 Forma de onda de la corriente en el inductor Según la Figura Nº 2.6, se puede determinar que el valor instantáneo de la corriente en el inductor es: ⎧ I 2 − I1 ⎪⎪ DT t + I 1 , 0 < t ≤ DT i L (t ) = ⎨ ⎪− I 2 − I 1 (t − DT ) + I 2 , DT < t ≤ T ⎪⎩ (1 − D)T (2.1.1-14) También se tiene que la corriente rms en el inductor es, por definición: I L ,rms 1 = T T ∫ (i (t ) ) dt 2 L (2.1.1-15) 0 Al sustituir la ecuación (2.1.1-14) en la ecuación (2.1.1-15), y tras un procedimiento matemático, se obtiene: I L , rms = 1 3 I 12 + I 1 I 2 + I 22 (2.1.1-16) 16 2.1.1.4.4 Dimensionamiento del Capacitor: Para seleccionar el Capacitor, se requiere primero determinar la resistencia ESR, en la siguiente figura se muestra el circuito a utilizar. Figura Nº 2.7 Compensación ESR VRC: Voltaje rizado residual producto del factor integral de la capacitancia. VRR: Voltaje rizado resistivo producto de la presencia de ESR. Ambos voltajes están relacionados en la siguiente ecuación: Vorpp = VRC + VRR (2.1.1-17) También se utilizan el siguiente criterio de diseño: V RR >> VRC (2.1.1-18) V RR ≈ Vorpp (2.1.1-19) Vorpp = ΔiC ⋅ ESR (2.1.1-20) Entonces: ESR = Vorpp (2.1.1-21) Δic Con ΔiC = Δi L 1 ⇒ Δi L = L DT ∫ (V 0 DC − VO ) dt = 1 (V DC − VO ) DT = ΔiC L (2.1.1-22) 17 Sustituyendo la ecuación (2.1.1-22) en la ecuación (2.1.1-21), se obtiene: ESR = LVorpp (VDC − VO ) DT ⇒ ESR = LVorpp f S V DC (2.1.1-23) (VDC − VO )VO Para determinar la capacitancia, se parte de la relación: Δi C = C ΔVC Δt ⇒ C= Δi C ⋅ Δt ΔVC (2.1.1-24) Donde: ΔVC = ΔV RC y con la ecuación (2.1.1-18), se tiene: ΔVC << VRR Para obtener una ecuación, se utiliza un criterio de diseño de un 10% la relación entre ambos voltajes: ΔVC = 0,1 ⋅ V RR y con ecuaciones (2.1.1 - 19) y (2.1.1 - 20) ⇒ ΔVC = 0,1 ⋅ Vorpp = 0,1 ⋅ ΔiC ⋅ ESR También: Δt = DT = D fS (2.1.1-25) (2.1.1-26) Finalmente, sustituyendo las ecuaciones (2.1.1-25) y (2.1.1-26) en la ecuación (2.1.1-24), se obtiene la ecuación para la capacitancia: ⇒ C= VO 0,1⋅ ESR⋅VDC ⋅ f S (2.1.1-27) 18 2.2 Modelo en Modo de Operación Discontinua 2.2.1 Convertidor Step Down (Buck o reductor) 2.2.1.1 Topología Figura Nº 2.8 Topología del convertidor Step Down En este convertidor, la tensión de la salida (VO ) siempre es menor que la tensión de la entrada (VDC ) . Funcionamiento: Tiene el mismo funcionamiento que el modelo en modo de operación continuo, la diferencia está en el inductor, el cual en el modo de operación discontinuo se descarga completamente, teniendo su corriente en cero durante un tiempo. Ese tiempo se determina a partir del período de operación del controlador (T ) y de los períodos de carga (T1 ) y de descarga (T2 ) del inductor. Tcero = T − (T1 + T2 ) . 19 2.2.1.2 Formas de onda Figura Nº 2.9 Formas de onda de la corriente en modo discontinuo De las formas de onda, se pueden determinar las siguientes ecuaciones, para la corriente del transistor, diodo e inductor, las cuales se utilizarán para todas las topologías en operación discontinua y no aislados. Se utilizarán la relaciones: D : ciclo de carga del inductor, D2 : ciclo de descarga del inductor. 20 Corriente promedio en el transistor: T IQ = 1 iQ (t ) dt T ∫0 1 [área bajo la curva] T 1 ⎡ DT ⋅ I LPK ⎤ IQ = ⎢ ⎥ T⎣ 2 ⎦ IQ = ⇒ IQ = D I LPK 2 (2.2.1-1) Corriente promedio en el diodo: T 1 I D = ∫ i D (t ) dt T 0 1 [área bajo la curva] T 1 ⎡ D T ⋅ I LPK ⎤ ID = ⎢ 2 ⎥ T⎣ 2 ⎦ ID = ⇒ ID = D2 I LPK 2 (2.2.1-2) Corriente promedio en el inductor: I L = IQ + I D ⇒ IL = ( D + D2 ) I LPK 2 (2.2.1-3) 21 2.2.1.3 Relaciones terminales a) Balance Voltios-segundo Ciclo de carga del inductor ( Δi L (+) ): Δi L (+ ) = DT (VDC − VO ) L Ciclo de descarga del inductor ( Δi L (−) ): Δi L ( − ) = D2TVO L En régimen permanente se requiere que: ΔiL (+) = ΔiL (−) DT (V DC − VO ) D2TVO = L L ⇒ VO = VDC cancelando L y T de ambos lados y despejando VO , se obtiene : D D + D2 (2.2.1-4) c) Relaciones terminales de Corriente En la Figura Nº 2.8 se observa que: I Q = I DC , I L = I O Además, con las ecuaciones (2.2.1-1) y (2.2.1-3), se obtienen la siguiente ecuación: D ⎫ I LPK ⎪⎪ 2 ⎬ D + D2 IO = I L = I LPK ⎪⎪ 2 ⎭ I DC = I Q = IO = ( D + D2 ) I DC D (2.2.1-5) 22 2.2.1.4 Diseño del convertidor (criterios para selección de componentes) 2.2.1.4.1 Selección paramétrica del Transistor: a) Voltaje reverso máximo (VRM) VRM > VDC (2.2.1-6) b) Corriente promedio I Q = I DC ⇒ IQ = D IO D + D2 (2.2.1-7) c) Potencia disipada En el Anexo A.1 se detalla el procedimiento para determinar la ecuación que se utilizará para calcular la potencia disipada en el transistor. En el escenario del peor caso: PD , TOTAL (Q) = I M2 RDS (ON ) + donde: VOFF = VDC , 1 f S VOFF I M (t ON + t OFF ) 2 I M = I Q = I DC = D IO , D + D2 corriente que alcanza el transistor cuando se enciende. ⎛ D ⇒ PD , TOTAL (Q) = ⎜⎜ ⎝ D + D2 2 ⎞ 2 1 D ⎟⎟ I O RDS (ON ) + f S VDC I O (t ON + t OFF ) 2 D + D 2 ⎠ (2.2.1-8) 23 2.2.1.4.2 Selección paramétrica del Diodo: a) Voltaje pico reverso (VPR) V PR > VO (2.2.1-9) b) Corriente promedio De las ecuaciones (2.2.1-2) y (2.2.1-3), se tiene: D2 ⎫ I LPK ⎪⎪ D2 2 IO ⎬ ⇒ ID = D + D2 D + D2 ⎪ IL = I LPK = I O ⎪ 2 ⎭ ID = (2.2.1-10) c) Potencia disipada En el Anexo A.2 se detalla el procedimiento para determinar la ecuación que se utilizará para calcular la potencia disipada en el diodo. En el escenario del peor caso: PD , TOTAL ( D) = I M VD + donde: I M = 1 f S VOFF I M (t ON + t OFF ) , 2 D2 I O , VOFF = V DC D + D2 ⇒ PD, TOTAL(D) = D2 D2 1 I OVD + f SVDC I O (tON + tOFF ) D + D2 2 D + D2 (2.2.1-11) 24 2.2.1.4.3 Selección paramétrica del Inductor: a) Inductancia máxima De la ecuación (2.2.1-3): I L = I O , MAX = Para: Δt = DT , V L = V DC − VO , Entonces: V DC − VO = ⇒ LMAX = I O , MAX I LPK ( D + D2 ) ⇒ I LPK = 2 2 D + D2 VL = L di L Δi =L L dt Δt LMAX 2 I O , MAX ( D + D2 ) DT (VDC − VO )(D + D2 )D 2I O,MAX f S (2.2.1-12) b) Corriente en el inductor (rms) Figura Nº 2.10 Forma de onda de la corriente en el inductor Según la Figura Nº 2.10, se puede determinar que el valor instantáneo de la corriente en el inductor es: 25 ⎧ I LPK 0 < t ≤ DT ⎪ DT t , ⎪ I LPK ⎪ i L (t ) = ⎨− (t − DT ) + I LPK , DT < t ≤ ( D + D2 )T − D T ( 1 ) ⎪ ⎪0, ( D + D2 )T < t ≤ T ⎪ ⎩ (2.2.1-13) También se tiene que la corriente rms en el inductor es, por definición: I L ,rms T 1 = T ∫ (i (t ) ) dt 2 L (2.2.1-14) 0 Al sustituir la ecuación (2.2.1-13) en la ecuación (2.2.1-14), y tras un procedimiento matemático, se obtiene: I L ,rms = I LPK D + D2 3 2.2.1.4.4 (2.2.1-15 Dimensionamiento del Capacitor: Para seleccionar el Capacitor, se utiliza la Figura Nº 2.7 y el procedimiento descrito en esa sección (2.1.1.4.4), con sus ecuaciones (desde la ecuación (2.1.1-17) hasta la (2.1.1-21)). ⇒ ESR = Vorpp Δic Con ΔiC = Δi L ⇒ Δi L = ⇒ 2 I O , MAX D + D2 ESR= = ΔiC (2.2.1-16) Vorpp(D + D2 ) 2IO,MAX (2.2.1-17) 26 Para determinar la capacitancia, se utilizan las ecuaciones (2.1.1-24) y (2.1.1-25): Δi C = C ΔVC Δt ⇒ C= Δ i C ⋅ Δt ΔVC ΔVC = 0,1 ⋅ Vorpp = 0,1 ⋅ ΔiC ⋅ ESR Finalmente, sustituyendo las ecuaciones respectivas en la ecuación (2.1.1-24), se obtiene la ecuación para la capacitancia: ⇒ C= D 0,1 ⋅ ESR ⋅ f S 2.2.1.4.5 (2.2.1-18) Determinación del ciclo de trabajo D2 Para que el convertidor opere en modo discontinuo, se requiere: D+ D2 = α ∀α <1 (2.2.1-19) El tiempo (1 − α )T está disponible para la operación del controlador. Típicamente α = 0,8 . De las relaciones terminales, la ecuación de Balance Volts-segundo (ecuación (2.2.1-4)), se despeja el ciclo de trabajo D (o D2) en términos del otro, y se sustituye en la ecuación (2.2.119), para un determinado valor de α , de donde se despeja un ciclo y luego, con la relación de dependencia, se despeja el otro ciclo. CAPÍTULO 3. COMPROBACIONES EXPERIMENTALES 3.1 Modelo en Modo de Operación Continua 3.1.1 Convertidor Step Down (Buck o reductor) 3.1.1.1 Especificaciones de diseño a) Tensión de entrada: V DC = 24V b) Tensión de salida: VO = 12 V c) Frecuencia de operación: f = 100 kHz ⇒ T = 10 μs d) Corriente máxima de salida: I O , MAX = 0.8 A e) Corriente mínima de salida: I O ,min = 0.25 A 3.1.1.2 Diseño del circuito 3.1.1.2.1 Convertidor Se utilizó el diseño y ecuaciones explicadas en la sección 2.1.1 3.1.1.2.1.1 D= Ciclo de trabajo VO 12 = V DC 24 ⇒ D = 0 .5 Con el ciclo de trabajo y el período de operación del convertidor, se determina el período de encendido del transistor: TON = DT = 5 μs 27 28 3.1.1.2.1.2 Corriente de entrada ⇒ I DC = 0.4 A I DC = D ⋅ I O = 0.5 ⋅ 0.8 3.1.1.2.1.3 Transistor Se utilizó el transistor FQP9P25, el cual es un Mosfet canal P tipo incremental. Las especificaciones del fabricante se muestran en el Anexo B. a) Voltaje reverso máximo (VRM) VRM > VDC ⇒ V RM > 24 V b) Corriente promedio (IQ) I Q = DI O , MAX ⇒ I Q = 0.4 A c) Potencia disipada PD , TOTAL (Q) = D 2 I O2 , MAX RDS (ON ) + 1 f S VDC DI O , MAX (t ON + t OFF ) 2 ⎛ 100 x10 3 ⋅ 24 ⋅ 0.5 ⋅ 0.8 ⋅ (360 x10 −9 + 240 x10 −9 ) ⎞ ⎟⎟ PD (Q) = 0.5 ⋅ 0.8 ⋅ 0.62 + ⎜⎜ 2 ⎠ ⎝ ( 2 2 ) PD (Q) = 0.387 W El transistor escogido cumple con las características necesarias. 29 3.1.1.2.1.4 Diodo Se utilizó el diodo Schottky MBR40250. En el Anexo C se muestran las especificaciones del fabricante. a) Voltaje pico reverso (VPR) V PR > VDC , MAX ⇒ V PR > 24 V b) Corriente promedio I D = (1 − D) I O ⇒ I D = 0.8 A c) Potencia disipada PD ( D) = (1 − D) I OVD + 1 f S V DC (1 − D) I O (t ON + t OFF ) 2 ⎛ 100 x10 3 ⋅ 24 ⋅ (1 − 0.5) ⋅ 0.8 ⋅ (35 x10 −9 ) ⎞ ⎟⎟ PD ( D) = ((1 − 0.5) ⋅ 0.8 ⋅ 0.86 ) + ⎜⎜ 2 ⎠ ⎝ PD ( D) = 0.361 W El diodo escogido cumple con las características necesarias. 3.1.1.2.1.5 Inductor a) Inductancia mínima Lmin = VO (VDC − VO ) 12 ⋅ (24 − 12) = = 120 x10 −6 3 2 I O ,minVDC f S 2 ⋅ 0.25 ⋅ 24 ⋅ 100 x10 Se escoge L = 150 μH , con la cual, la corriente mínima sería: I O ,min (VDC − VO ) DT (24 − 12) ⋅ 0.5 ⋅ 10 x10 −6 = = 2⋅ L 2 ⋅ 150 x10 −6 ⇒ I O ,min = 0.2 A 30 b) Corriente en el inductor (rms) I L ,rms = 1 3 I 12 + I 1 I 2 + I 22 Donde las corrientes I 1 e I 2 se determinan a continuación: Para este convertidor, la corriente promedio en el inductor es igual a la corriente de salida, además, con la ecuación del inductor (Ecuación 3.1.1-1), se tiene: IO = I L = I1 + I 2 = 0 .8 2 ⇒ I 1 + I 2 = 1 .6 A (a) También, según la Figura Nº 2.3, se tiene: Δi L = I 2 − I 1 = (V DC − VO ) D (24 − 12) ⋅ 0.5 = = 0 .4 L⋅ f (150 x10 −6 ) ⋅ (100 x10 3 ) Resolviendo el sistema con (a) y (b), se obtiene: ⇒ I 2 − I 1 = 0 .4 I 1 = 0.6 A I2 = 1A Entonces, la corriente rms es: I L ,rms = 1 3 3.1.1.2.1.6 ΔiC = C C≥ ΔVC Δt 0.6 2 + 0.6 ⋅ 1 + 12 ⇒ I L ,rms = 0.81 A Capacitor ⇒ C= ΔiC ⋅ Δt ΔVC (VDC − VO ) DT ⋅ DT (24 − 12)(0.5 ⋅ 10 x10 −6 ) ⋅ (0.5 ⋅ 10 x10 −6 ) = = 2.86 μF L ⋅ Vorpp 150 x10 −6 ⋅ 0.7 Se escoge por razones prácticas: C = 470 μF (b) 31 3.1.1.2.1.7 η= Eficiencia POUT POUT VO ⋅ I O 12 ⋅ 0.8 = = = = 0.9277 PIN POUT + PDISIPADA VO ⋅ I O + PD (Q) + PD ( D) 12 ⋅ 0.8 + 0.387 + 0.361 η = 92.77% 3.1.1.2.2 Controlador Se utilizó control mediante modulación de ancho de pulso (PWM). Se decidió utilizar un circuito integrado que cumple esta función, el cual es el SG3524, en el Anexo D se muestran las especificaciones del fabricante. Este mismo PWM se utilizó en todos los convertidores. Se conectan elementos (resistencias y/o capacitores) a ciertas patillas del componente para determinar cierta función, a continuación se muestran las funciones y elementos encargados de controlarlas. - Frecuencia de operación del circuito: se conectan respectivamente a las patillas 6 y 7 del PWM una resistencia RT y un capacitor CT que fijan la frecuencia. Para escoger el valor de estos componentes, se usan las figuras 5 y 6 de las especificaciones del fabricante, para el período ( T = 1 ) requerido. La figura se muestra a continuación: f 32 Figura Nº 3.1 Determinación de RT y CT Entonces, para f = 100 kHz ⇒ T = 10 μs , se escoge un capacitor C T = 2 nF , al cual le corresponde una resistencia RT = 4 kΩ . - Tensión estable (VO): se define con una realimentación al controlador a través de unas resistencias a un amplificador de error, el cual es un amplificador diferencial al que se le implementan dos divisores de tensión, que tiene un voltaje de referencia V REF = 5V , como se muestra en la siguiente figura: Figura Nº 3.2 Circuito del amplificador de error 33 Del circuito anterior se pueden deducir las siguientes ecuaciones: ⎛ 5k ⎞ VREF 5 V+ = VREF ⎜ = = 2.5V ⎟= 2 2 ⎝ 5k + 5k ⎠ ⎛ R1 V− = VO ⎜⎜ ⎝ R1 + R2 ⎞ ⎟⎟ ⎠ Y, mediante cortocircuito virtual en el amplificador: V+ = V− ⎛ R + R2 ⇒ VO = 2.5⎜⎜ 1 ⎝ R1 ⎞ R ⎟⎟ = 2.5 + 2.5 2 R1 ⎠ ⎛ R1 ⇒ 2.5 = VO ⎜⎜ ⎝ R1 + R2 ⎞ ⎟⎟ ⎠ (3.1.1-1) La ecuación (3.1.1-1) se utilizará en el diseño del controlador de todos los convertidores. Para este convertidor, Vo=12 V, entonces: (12 − 2.5) R2 = 2 .5 R1 También se requiere que: ⇒ R1 + R2 = ⇒ 3.8 R1 − R2 = 0 (a) VO = 1 mA R1 + R2 VO 12 = 1 mA 1 mA ⇒ R1 + R2 = 12000 (b) Resolviendo el sistema de (a) y (b), se obtiene: R1 = 2 .5 kΩ R 2 = 9 .5 k Ω Se utilizará para R1 dos resistencias en serie de 1 k Ω y 1.5 k Ω , y para R2 un potenciómetro de 10 k Ω . 34 3.1.1.3 Diagrama esquemático final Figura Nº 3.3 Circuito convertidor Step Down 3.1.1.4 3.1.1.4.1 Procedimiento del experimento Equipo Tabla 3.1 Lista de equipo para el experimento. Equipo Modelo Fuente de poder de corriente directa Tektronix PS280 Osciloscopio Tektronix TDS1000 Multímetro Fluke 115 35 3.1.1.4.2 Componentes Tabla 3.2 Lista de componentes para el experimento. Dispositivo Valor teórico (cantidad) Transistor mosfet canal P FQP9P25 (1) Diodo Schottky MBR40250 (1) PWM SG3524 (1) Inductor PE53113 150 uH (1) Resistencias 1/4 W 2.2 k Ω (2) 1.8 k Ω (2) 1.5 k Ω (2) 1 k Ω (4) 47 k Ω (1) Resistencias 25 W 47 Ω (1) 33 Ω (1) 1 Ω (1) Potenciómetros Capacitores 10 k Ω (2) 2 nF (1) 10 nF (1) 470 uF (1) 1000 uF (1) 3.1.1.4.3 Procedimiento 1) Se armó el circuito de la Figura Nº 3.3, con los componentes de la Tabla 3.2. 2) Se ajustó el equipo de la Tabla 3.1, para hacer las verificaciones del funcionamiento del circuito. 36 3) Para verificar la frecuencia del controlador, se colocó la punta del osciloscopio en la salida del PWM (patilla 12 ó 13), y se ajustó el potenciómetro conectado a la patilla 6 del PWM (RT) hasta obtener la frecuencia deseada. Se tomaron capturas del osciloscopio de las formas de onda obtenidas. 4) Para verificar la conmutación, se colocó la punta del osciloscopio en el cátodo del diodo (patilla 1). Se tomaron capturas del osciloscopio de las formas de onda obtenidas, de estas capturas también se determinó el período de encendido del transistor. 5) Para verificar la carga y descarga del inductor, se colocó una resistencia de 1 Ω en serie con el inductor. Se tomaron capturas del osciloscopio de las formas de onda de tensión obtenidas, y con la Ley de Ohm, se determinó las corrientes del inductor. 6) Para verificar la tensión de salida, se colocó la punta del osciloscopio en la resistencia de carga de 15 Ω , y se ajustó el potenciómetro conectado entre el nodo de la salida y el nodo de la realimentación al controlador, hasta obtener la tensión deseada. Se tomaron capturas del osciloscopio de la forma de onda obtenida. 7) Para verificar la corriente mínima de operación en modo continuo, se aumentó la carga, hasta el punto en que la forma de onda de la captura del punto 5) tuviera la tensión mínima en 0 V. 8) Se verificó el funcionamiento del circuito total, variando la alimentación, y observando que las formas de onda del punto 3) y comportamiento esperado. 6) mantuvieran el 37 3.1.1.5 Resultados Experimentales 3.1.1.5.1 3.1.1.5.1.1 Capturas del oscilocopio Forma de onda de la salida del PWM: Figura Nº 3.4 Salida del PWM En la figura anterior, se puede observar el período correspondiente del controlador: y la frecuencia de oscilación T = 10 μs f = 100 kHz El período de encendido del transistor ( TON ) se puede determinar utilizando la forma de onda en el diodo (punta del osciloscopio entre el cátodo del diodo y tierra). 38 Cuando el transistor está encendido ( QON ), el diodo está apagado ( DOFF ), y se comportan así: - QON : hay un camino entre la fuente (s) y el drenaje (d) del transistor, lo que equivale a un cortocircuito, entonces: R ≈ 0 ⇒ VQ = Vds = I ⋅ R ≈ 0 ⇒ VQ : en bajo . - DOFF : No hay camino entre el ánodo (a) y el cátodo (k) del diodo, lo que equivale a un circuito abierto, entonces: R ≈ ∞ ⇒ VD = Vka = I ⋅ R ≈ ∞ ⇒ V D : en alto . Figura Nº 3.5 Forma de onda del voltaje en el diodo Se observa en la figura que: TON = 5 μs Entonces, el ciclo de trabajo es: D= TON 5 μs = ⇒ D = 0 .5 T 10 μs 39 3.1.1.5.1.2 Forma de onda de corriente en el inductor Para poder determinar la corriente en el inductor, se colocó en serie con el inductor una resistencia R = 1Ω , en la cual se pueden ver las variaciones de tensión y el período, la Figura Nº 3.6 muestra la captura obtenida. Figura Nº 3.6 Corriente en el inductor El cursor 1, corresponde a V1 = 0.6 V , el cursor 2, corresponde a V2 = 1V , entonces, la corriente respectiva es: I1 = V1 0.6 = R 1 I2 = V2 1 = R 1 ⇒ I 1 = 0 .6 A ⇒ I2 = 1A Con esos dos valores de corriente, se puede calcular: - La corriente rms en el inductor es: I L ,rms = 1 3 I 12 + I 1 I 2 + I 22 = 1 3 0.6 2 + 0.6 ⋅ 1 + 12 ⇒ I L ,rms = 0.81 A 40 - También se puede calcular ΔiL según la Figura Nº 2.3 (sección 2.1.1.2): Δi L = I 2 − I 1 = 1. − 0.6 ⇒ Δi L = 0.4 A Comparando con ΔiL según la relación VL = L Δi L = ΔiL , se tiene: Δt (V DC − VO ) D (24 − 12) ⋅ 0.5 = = 0 .4 A L⋅ f (150 x10 −6 ) ⋅ (100 x10 3 ) - La corriente de salida: IO = I 1 + I 2 1. 6 = ⇒ I O = 0.8 A 2 2 También se colocó el amperímetro en serie con la carga, para así medir la corriente que pasa a través de ésta, el dato obtenido es: I O = 0.786 A , dato que se tomará como el valor real de la corriente máxima de salida. Al variar la carga (se fue aumentando desde 15 Ω iniciales, hasta 67 Ω ), se determina la corriente mínima de salida ( I O ,min ). Para una carga de RO = 62 Ω , se obtuvo: 41 Figura Nº 3.7 Corriente en el inductor El cursor 1, corresponde a V1 = 0 V , el cursor 2, corresponde a V2 = 0.38V , entonces, la corriente correspondiente es: I1 = V1 0 = R 1 I2 = V2 0.38 = R 1 ⇒ I1 = 0 A ⇒ I 2 = 0.38 A Con esos dos valores, se puede calcular la corriente mínima de salida: IO = I 1 + I 2 0.38 = ⇒ I O ,min = 0.19 A 2 2 También se colocó el amperímetro en serie con la carga, para así medir la corriente que pasa a través de ésta, el dato obtenido es: I O ,min = 0.194 A , dato que se tomará como el valor real de la corriente mínima de salida. 42 Con este valor de I O ,min ya se está en el límite del modo de operación continuo, cumpliéndose lo calculado en la sección 3.1.1.2.1.5, a), donde se determinó que el valor mínimo de la corriente de salida, para estar en operación continua es: I O ,min = 0.20 A 3.1.1.5.1.3 Salida del convertidor En la siguiente figura se puede apreciar la tensión DC en la salida del convertidor, con un valor máximo de 12.6 V, y un valor promedio de 12 V, el cual es el valor esperado. Figura Nº 3.8 Tensión en la salida La carga que se utiliza es una resistencia RO = 15Ω , 25 W, sin embargo, el valor real de ésta es de 15.2 Ω . Entonces, la corriente de salida, según estos datos es: IO = VO 12V = RO 15.2 Ω ⇒ I O = 0.789 A , la cual muy aproximada a la corriente de salida determinada en la sección anterior ( I O = 0.786 A ). 43 Entonces, para una corriente de salida de 0.789 A, se requiere una corriente de entrada: I DC = D ⋅ I O = 0.5 ⋅ 0.789 3.1.1.5.1.4 η= ⇒ I DC = 0.395 A Eficiencia POUT POUT VO ⋅ I O 12 ⋅ 0.789 = = = = 0.9289 PIN POUT + PDISIPADA VO ⋅ I O + PD (Q) + PD ( D ) 12 ⋅ 0.789 + 0.334 + 0.391 η = 92.89% 3.1.1.5.2 Comparación valores teóricos y valores experimentales Para comparar los valores, se utiliza el porcentaje de error, dato importante que relaciona el valor teórico con el valor experimental mediante la siguiente ecuación: ⎛ (valor teórico) − (valor exp erimental ) ⎞ % Error = ⎜⎜ ⋅ 100 ⎟⎟ (valor teórico) ⎝ ⎠ La Tabla 3.3 resume los datos obtenidos en las secciones anteriores. Se obtuvieron buenos resultados, la diferencia entre el valor teórico y el experimental es prácticamente cero. Se logró obtener la tensión de salida y la frecuencia dadas en las especificaciones de diseño, la corriente de salida es un poco menor a la especificada, sin embargo esto se debe a que la carga utilizada es un poco mayor que la carga esperada. 44 En general, pese a estas pequeñas diferencias, se puede concluir que se validan satisfactoriamente los modelos matemáticos para el convertidor Step Down en operación continua. Tabla 3.3. Comparación de parámetros Step Down Continuo Parámetro Tensión entrada (V) Tensión salida (V) Ciclo de trabajo Frecuencia (KHz) Corriente salida (A) Corriente entrada (A) Eficiencia (%) I 1 (A) I 2 (A) ΔiL = I 2 − I1 ΔiL = (V DC − V O ) ⋅ D L⋅ f Valor teórico Valor experimental Porcentaje de error (%) 24.0 12.0 0.50 100.0 0.800 0.400 92.77 0.600 1.000 0.400 24.0 12.0 0.50 100.0 0.789 0.395 92.89 0.600 1.000 0.400 0.00 0.00 0.00 0.00 1.38 1.25 0.13 0.00 0.00 0.00 0.400 0.400 0.00 45 3.2 Modelo en Modo de Operación Discontinua 3.2.1 Convertidor Step Down (Buck o reductor) 3.2.1.1 Especificaciones de diseño a) Tensión de entrada: V DC = 30V b) Tensión de salida: VO = 12 V c) Frecuencia de operación: f = 100 kHz ⇒ T = 10 μs d) Corriente máxima de salida: I O , MAX = 0.15 A 3.2.1.2 Diseño del circuito 3.2.1.2.1 Convertidor Se utilizó el diseño y ecuaciones explicadas en la sección 2.2.1 3.2.1.2.1.1 VO = VDC D= Ciclo de trabajo D D + D2 VO ( D + D2 ) VDC 12 ( D + D2 ) 30 D = 0.4 ( D + D2 ) D= Para que el convertidor opere en modo discontinuo, se requiere que D + D2 = α Se utilizará el valor típico: α = 0.8 Donde: D : ciclo de carga del inductor, D2 : ciclo de descarga del inductor. ∀α < 1 46 Entonces: D = 0.4 ⋅ 0.8 D2 = 0.8 − D ⇒ D = 0.32 D2 = 0.48 A partir de estos ciclos, se calculan períodos de operación: - El período de carga del inductor se calcula relacionando el ciclo de carga del inductor con el período de operación del convertidor: T1 = DT = 0.32 ⋅ 10 μs - El ciclo de encendido del transistor es igual al ciclo de carga de inductor, entonces el período de encendido del transistor es igual al período de carga del inductor: TON = DT = 0.32 ⋅ 10 μs ⇒ TON = 3.2 μs - El período de apagado del transistor es igual al período de operación del convertidor menos el período de encendido: TOFF = T − TON = 10 μs − 3.2 μs ⇒ TOFF = 6.8 μs - El período de descarga del inductor se calcula relacionando el ciclo de descarga con el período de operación del convertidor: T2 = D2T = 0.48 ⋅ 10 μs ⇒ T2 = 4.8 μs - El inductor estará con la corriente igual a cero, durante el tiempo restante para completar el período de operación del convertidor de ( 10μs ), es decir, durante: Tcero = T − (T1 + T2 ) Tcero = 10μs − (3,2μs + 4.8μs ) 3.2.1.2.1.2 I DC = ⇒ Tcero = 2μs Corriente de entrada D 0.32 IO = 0.15 D + D2 0.8 ⇒ I DC = 0.06 A 47 3.2.1.2.1.3 Transistor Se utilizó el transistor FQP9P25, el cual es un Mosfet canal P tipo incremental. Las especificaciones del fabricante se muestran en el Anexo B. a) Voltaje reverso máximo (VRM) VRM > VDC ⇒ V RM > 30 V b) Corriente promedio (IQ) IQ = D 0.32 IO = 0.15 D + D2 0.8 ⇒ I Q = 0.06 A c) Potencia disipada PD , TOTAL (Q) = I Q2 RDS (ON ) + 1 f S VDC I Q (t ON + t OFF ) 2 ⎛ 100 x10 3 ⋅ 30 ⋅ 0.06 ⋅ (360 x10 −9 + 240 x10 −9 ) ⎞ ⎟⎟ PD (Q) = 0.06 2 ⋅ 0.62 + ⎜⎜ 2 ⎝ ⎠ ( ) PD (Q) = 0.056W El transistor escogido cumple con las características necesarias. 3.2.1.2.1.4 Diodo Se utilizó el diodo Schottky MBR40250. En el Anexo C se muestran las especificaciones del fabricante. a) Voltaje pico reverso (VPR) V PR > V O ⇒ V PR > 12 V 48 b) Corriente promedio ID = D2 0.48 IO = 0.15 ⇒ I D = 0.09 A D + D2 0 .8 c) Potencia disipada PD , TOTAL ( D) = I DVD + 1 f S VDC I D (t ON + t OFF ) 2 ⎛ 100 x10 3 ⋅ 30 ⋅ 0.09 ⋅ (35 x10 −9 ) ⎞ ⎟⎟ PD ( D) = (0.09 ⋅ 0.86 ) + ⎜⎜ 2 ⎠ ⎝ PD ( D) = 0.082 W El diodo escogido cumple con las características necesarias. 3.2.1.2.1.5 Inductor a) Inductancia máxima LMAX = (VDC − VO ) ⋅ ( D + D2 ) ⋅ D (30 − 12) ⋅ 0.8 ⋅ 0.32 = = 153.6 x10 −6 3 2 f S I O , MAX 2 ⋅ 100 x10 ⋅ 0.15 Se escoge L = 150 μH , con la cual, la corriente máxima sería: I O , MAX = (V DC − VO ) ⋅ ( D + D2 ) ⋅ D (30 − 12) ⋅ 0.8 ⋅ 0.32 = 2 fS L 2 ⋅ 100 x10 3 ⋅ 150 x10 −6 ⇒ I O , MAX = 0.1536 A b) Corriente en el inductor (rms) I L ,rms = I LPK 3 D + D2 , Donde la corriente I LPK se determina a continuación: 49 Para este convertidor, la corriente promedio en el inductor es igual a la corriente de salida máxima, además, con la ecuación del inductor (Ecuación 3.2.1-1), se tiene: I O ,MAX = I L = ⇒ I LPK = ( D + D2 ) I LPK 2 2 ⋅ I O , MAX = D + D2 2 ⋅ 0.1536 0.8 ⇒ I LPK = 0.384 A También se podría calcular utilizando la ecuación relacionada con la tensión: (VDC − VO ) D (30 − 12) ⋅ 0.32 = L⋅ f 150 x10 −6 ⋅ 100 x10 3 I LPK = ⇒ I LPK = 0.384 A Entonces, la corriente rms es: I L ,rms = 0.384 3 3.2.1.2.1.6 ΔiC = C C≥ ΔVC Δt 0.8 ⇒ I L ,rms = 0.198 A Capacitor ⇒ C= 2 I O , MAX ⋅ DT D + D2 ⋅ 0.1 ⋅ Vorpp ΔiC ⋅ Δt ΔVC 2 ⋅ 0.15 ⋅ (0.32 ⋅ 10 x10 −6 ) = = 17.14 μF 0.8 ⋅ 0.1 ⋅ 0.7 Se escoge por razones prácticas: C = 470 μF 3.2.1.2.1.7 η= Eficiencia POUT POUT VO ⋅ I O 12 ⋅ 0.15 = = = = 0.9288 PIN POUT + PDISIPADA VO ⋅ I O + PD (Q) + PD ( D ) 12 ⋅ 0.15 + 0.056 + 0.082 η = 92.88% 50 3.2.1.2.2 Controlador Se utilizó el control mediante modulación de ancho de pulso (PWM), el circuito integrado utilizado es el SG3524, en el Anexo D se adjuntan las especificaciones del fabricante. En la sección 3.1.1.2.3 se detalló el procedimiento para definir el controlador. - Frecuencia de operación del circuito: para f = 100 kHz ⇒ T = 10 μs , se escoge un capacitor C T = 2 nF , al cual le corresponde una resistencia RT = 4 kΩ , por lo tanto se utilizará un potenciómetro de 10 k Ω . - Tensión estable (VO): se define con una realimentación al controlador a través de unas resistencias a un amplificador de error, este circuito es el de la Figura Nº 3.2 y fue analizado en la sección 3.1.1.2.2, y se obtuvo la ecuación general: ⎛ R1 + R2 ⎞ R2 ⎜ ⎟ = ⋅ 2 . 5 = 2 . 5 + 2 . 5 V ⇒ O ⎜ R ⎟ R1 ⎝ 1 ⎠ (3.1.1-1) Para este convertidor, V0=12 V, entonces: (12 − 2.5) R2 = 2 .5 R1 ⇒ 3.8 R1 − R2 = 0 (a) También se requiere que: ⇒ R1 + R2 = VO = 1 mA R1 + R2 VO 12 ⇒ R1 + R2 = 12000 (b) = 1 mA 1 mA Resolviendo el sistema de (a) y (b), se obtiene: R1 = 2 .5 kΩ R 2 = 9 .5 kΩ 51 Se utilizará para R1 dos resistencias en serie de 1 k Ω y 1.5 k Ω , y para R2 un potenciómetro de 10 k Ω . 3.2.1.2.3 Diagrama esquemático final Figura Nº 3.9 Circuito convertidor Step Down en modo discontinuo 3.2.1.3 Procedimiento del experimento 3.2.1.3.1 Equipo Tabla 3.4 Lista de equipo para el experimento. Equipo Modelo Fuente de poder de corriente directa Tektronix PS280 Osciloscopio Tektronix TDS1000 Multímetro Fluke 115 52 3.2.1.3.2 Componentes Tabla 3.5 Lista de componentes para el experimento. Dispositivo Valor teórico (cantidad) Transistor mosfet canal P FQP9P25 (1) Diodo Schottky MBR40250 (1) PWM SG3524 (1) Inductor PE53113 150 uH (1) Resistencias 1/4 W 2.2 k Ω (2) 1.8 k Ω (2) 1.5 k Ω (2) 1 k Ω (4) 47 k Ω (1) Resistencias 25 W 15 Ω (1) 1 Ω (1) Potenciómetros Capacitores 10 k Ω (2) 2 nF (1) 10 nF (1) 470 uF (1) 1000 uF (1) 3.2.1.3.3 Procedimiento 1) Se armó el circuito de la Figura Nº 3.9, con los componentes de la Tabla 3.5. 2) Se ajustó el equipo de la Tabla 3.4, para hacer las verificaciones del funcionamiento del circuito. 53 3) Para verificar la frecuencia del controlador, se colocó la punta del osciloscopio en la salida del PWM (patilla 12 ó 13), y se ajustó el potenciómetro conectado a la patilla 6 del PWM (Rt) hasta obtener la frecuencia deseada. Se tomaron capturas del osciloscopio de las formas de onda obtenidas. 4) Para verificar la conmutación, se colocó la punta del osciloscopio en el cátodo del diodo (patilla 1). Se tomaron capturas del osciloscopio de las formas de onda obtenidas. 5) Para verificar la carga y descarga del inductor, se colocó una resistencia de 1 Ω en serie con el inductor. Se tomaron capturas del osciloscopio de las formas de onda de tensión obtenidas, y con la Ley de Ohm, se determinó la corriente pico del inductor. También se determinó el período de encendido y de apagado del transistor. 6) Para verificar la tensión de la salida, se colocó la punta del osciloscopio en la resistencia de carga de 80 Ω , y se ajustó el potenciómetro conectado entre el nodo de la salida y el nodo de la realimentación al controlador, hasta obtener la tensión deseada. Se tomaron capturas del osciloscopio de la forma de onda obtenida. 7) Para verificar la corriente máxima de operación en modo discontinuo, se disminuyó la carga, hasta el punto en que la forma de onda de la captura del punto 5) tuviera el ciclo de carga más el ciclo de descarga del inductor igual a uno. 8) Se verificó el funcionamiento del circuito total, variando la alimentación, y observando que las formas de onda del punto 3) y comportamiento esperado. 6) mantuvieran el 54 3.2.1.4 Resultados Experimentales 3.2.1.4.1 Capturas del oscilocopio 3.2.1.4.1.1 Forma de onda de la salida del PWM: Con la siguiente figura, se determina el período y la frecuencia del controlador: Figura Nº 3.10 Salida del PWM Se puede observar que: 3.2.1.4.1.2 T = 10μs f = 100 kHz Forma de onda de corriente en el inductor Para determinar la corriente en el inductor, se colocó en serie con el inductor una resistencia R = 1Ω , en la cual se pueden ver las variaciones de tensión y el período. En la Figura Nº3.11 se muestra la captura obtenida para determinar corriente, a partir de la tensión en el inductor: 55 Figura Nº 3.11 Tensión en el inductor El cursor 1, corresponde a V1 = 0 V , el cursor 2, corresponde a V2 = 0.360 V , entonces, la corriente pico es: I LPK = V2 0.272 = R 1 ⇒ I LPK = 0.272 A Con este valor de corriente, se puede determinar: - La corriente rms en el inductor es: I L ,rms = I LPK 3 D + D2 , Falta por determinar ( D + D2 ). Utilizando las formas de onda de la tensión en el inductor, se pude determinar el tiempo de carga ( T1 ) y el tiempo de descarga ( T2 ) del inductor, y con estos tiempos, se calcula el período de encendido (TON ) y de apagado (TOFF ) del transistor. 56 Figura Nº 3.12 Tiempos de operación del inductor T1 = 3.5 μs Se observa que: T2 = 4.6 μs ⇒ Tcero = 1.9 μs TON = 3.5 μs TOFF = 4.6μs + 1.9μs = 6.5 μs Entonces, los ciclos del inductor son: D= T1 3.5 μs = ⇒ D = 0.35 T 10 μs D2 = T2 4.6 μs ⇒ D2 = 0.46 = T 10 μs ⇒ D + D2 = 0.81 La corriente rms es: I L ,rms = I LPK 3 D + D2 = 0.272 3 (0.35 + 0.46) ⇒ I L ,rms = 0.141 A 57 Al variar la carga (se fue disminuyendo desde 80 Ω iniciales, hasta 47 Ω ), se determina el valor crítico de la resistencia que define el límite entre la operación continua y discontinua, ésta es RO = 50 Ω , con la que se obtuvo: Figura Nº 3.13 Tensión en el inductor Se observa que: D + D2 ≈ 1 . La corriente que se obtiene en este caso, medida con el amperímetro, es 0.235 A. 3.2.1.4.1.3 Salida del convertidor En la siguiente figura se puede apreciar la tensión DC en la salida del convertidor, con un valor máximo de 12.2 V, y un valor promedio de 12 V, el cual es el valor esperado. 58 Figura Nº 3.14 Tensión en la salida La carga que se utiliza es una resistencia RO = 80Ω , 25 W, sin embargo, el valor real de ésta es de 78.4 Ω . Entonces, la corriente de salida, según estos datos es: IO = VO 12 V = RO 78.4 Ω ⇒ I O = 0.153 A , También se colocó el amperímetro en serie con la carga, para así medir la corriente que pasa a través de ésta, el dato obtenido es: I O = 0.153 A , dato que se tomará como el valor real de la corriente máxima de salida. Entonces, para una corriente de salida de 0.153 A, se requiere una corriente de entrada: I DC = D 0.35 IO = 0.153 D + D2 0.81 ⇒ I DC = 0.066 A 59 3.2.1.4.1.4 η= Eficiencia POUT POUT VO ⋅ I O 12 ⋅ 0.153 = = = = 0.9287 PIN POUT + PDISIPADA VO ⋅ I O + PD (Q) + PD ( D ) 12 ⋅ 0.153 + 0.062 + 0.079 η = 92.87% 3.2.1.4.2 Comparación valores teóricos y valores experimentales Para comparar los valores, se utiliza el porcentaje de error, que es un dato importante que relaciona el valor teórico con el valor experimental mediante la siguiente ecuación: ⎞ ⎛ (valor teórico) − (valor exp erimental ) % Error = ⎜⎜ ⋅ 100 ⎟⎟ (valor teórico) ⎠ ⎝ La siguiente tabla resume los datos obtenidos en las secciones anteriores: Tabla 3.6 Comparación de parámetros Step Down Discontinuo Parámetro Tensión entrada (V) Tensión salida (V) Ciclo de trabajo D Ciclo de trabajo D 2 Frecuencia (KHz) Corriente salida (A) Corriente entrada (A) Eficiencia (%) I LPK (A) Valor teórico 30.00 12.00 0.32 0.48 100.00 0.150 0.060 92.88 0.384 Valor experimental 30.00 12.00 0.35 0.46 100.00 0.153 0.066 92.87 0.272 Porcentaje de error (%) 0.00 0.00 9.37 4.17 0.00 2.00 10.00 0.01 29.17 60 Observando los datos de la Tabla 3.6, se puede hacer dos grupos de parámetros, uno para los que tienen el porcentaje de error menor o igual a 2%, y el otro grupo para los que tienen el porcentaje de error mayor a 2 %. Para el grupo 1 (% Error ≤ 2%), se puede decir que la diferencia entre el valor teórico y el experimental es prácticamente cero. El controlador operó a la frecuencia esperada, también se logró obtener los valores dados en las especificaciones del diseño para la y la corriente de salida, con una pequeña diferencia de 2%, debido a que la carga utilizada tiene un valor real 2% menor al valor definido para el circuito. Para el grupo 2 (2% < % Error), la diferencia entre el valor teórico y el experimental es más significativa, esta diferencia se debe principalmente al ciclo de trabajo, parámetro común en este grupo, el cual tiene un porcentaje de error de 10%, esta diferencia se debe a que el período de encendido del transistor experimentalmente (3.5 μs ) es 9.37% mayor que el período estimado teóricamente (3.2 μs ). Sin embargo, pese a estas pequeñas diferencias, se puede concluir que se validan exitosamente los modelos matemáticos para el convertidor Step Down en operación discontinua. CAPÍTULO 4. CONCLUSIONES Y RECOMENDACIONES 4.1 CONCLUSIONES ¾ Se validan experimentalmente de manera satisfactoria, los modelos matemáticos para el convertidor Step Down, en modo de operación continuo y discontinuo. ¾ Se realizó un levantamiento detallado de los modelos matemáticos para el convertidor Step Down, en modo de operación continuo y discontinuo. Para los otros convertidores, no se realizó este levantamiento debido a que no alcanzó el tiempo para realizar la comprobación experimental para ellos. ¾ Se empezó a trabajar usando el PWM TL5001, sin embargo, este controlador no funcionó como se esperaba; se reemplazó entonces, con el PWM SG3524. Este último funciona convenientemente. De este modo, se puede concluir que para efectos prácticos, es más útil el SG3524. ¾ Para el Step Down en operación continua: • Se obtuvo la tensión y corriente de salida especificadas, operando a la frecuencia deseada. 61 62 • El ciclo de trabajo que se obtuvo con el circuito fue igual al calculado en el diseño. • La inductancia calculada como mínima para mantener al convertidor en operación continua (para cierta corriente mínima), es la correcta, ya que se obtuvo la corriente mínima esperada, y continuando en operación continua. • La eficiencia del controlador es alta, como era de esperar por tratarse de fuentes conmutadas, gracias a que la potencia disipada es muy baja. • El cálculo de la corriente mínima (I1) y la máxima (I2) a través del inductor, dio resultados que fueron validados satisfactoriamente con el circuito. • Se validan exitosamente las ecuaciones para el cálculo de Δi L , ya que los resultados experimentales coinciden con el valor calculado. ¾ Para el Step Down en operación discontinua: • Se obtuvo la tensión y corriente de salida especificadas, operando a la frecuencia deseada. • El ciclo de trabajo que se obtuvo con el circuito es mayor al ciclo calculado en el diseño, esto se debe a que el tiempo que permanece encendido el transistor es mayor que el calculado. • La inductancia calculada como máxima para mantener al convertidor en operación discontinua (para cierta corriente máxima), es la correcta, ya que se obtuvo la corriente máxima esperada en operación discontinua. 63 4.2 RECOMENDACIONES ¾ Es recomendable que la persona que vaya a implementar los diferentes circuitos, se encuentre familiarizado con los equipos disponibles en la bodega de la escuela, así como su manejo, para con esto agilizar el trabajo. ¾ Para la implementación del convertidor, se recomienda que todos los componentes a utilizar sean nuevos, para evitar perder el tiempo utilizando componentes dañados. ¾ Es muy útil realizar una amplia investigación de las características de los componentes a utilizar, para así verificar que estos cuenten con las especificaciones necesarias ¾ Es muy importante finalizar con los objetivos de este proyecto, que por falta de tiempo no se lograron cumplir, ya que los resultados obtenidos son muy útiles para el curso de Electrónica III. ¾ Para futuros trabajos, es importante analizar los efectos no lineales que podrían producir tanto el inductor como el capacitor en el circuito, y por ende, en los resultados obtenidos en las mediciones. 64 BIBLIOGRAFIA 1. Delgado, Geovanny. “Apuntes del curso Electrónica III (IE-0513)”. Universidad de Costa Rica, San Pedro, San José, Costa Rica: II Semestre, 2006. 2. Boylestad, Robert L. “Electrónica. Teoría de Circuitos”. Quinta Edición. Pearson Educación. México. 1994. 3. Schilling, D. L. “Circuitos electrónicos: discretos e integrados” 3ª Ed. McGraw Hill, México, 1993. 4. Texas Instruments. Texas Instruments. “Understanding Back Power Stages in Switchmode Power Supplies”. Marzo de1999. http://focus.ti.com/lit/an/slva057/slva057.pdf 5. Erickson, Robert W. University of Colorado. “DC-DC Power Converters”. http://ece-www.colorado.edu/~rwe/papers/Encyc.pdf 6. Phillips Semiconductors. Phillips Semiconductors. “SG3524 SMPS Control Circuit Datasheet”. Agosto de 1994. http://www.nxp.com/acrobat_download/datasheets/SG3524.pdf 7. ON Semiconductors. ON Semiconductors. “250 V, 40 A Switchmode Schottky Power Rectifier”. Junio 2008. http://www.onsemi.com/pub_link/Collateral/MBR40250-D.pdf 65 8. Fairchild Semiconductors. Fairchild Semiconductors. “250 V P-Channel MOSFET”. Diciembre del 2000. http://www.fairchildsemi.com/ds/FQ/FQP9P25.pdf 9. Pulse. Pulse. “Inductors Designed for National’s 50 kHz Simpler Switcher”. October 2008. http://ww2.pulseeng.com/products/datasheets/P596.pdf 66 ANEXO A CÁLCULO DE LA POTENCIA DISIPADA 2 Es conveniente realizar un breve estudio sobre las condiciones de disipación de potencia en los transistores y de los diodos en conmutación. Esto es necesario por cuanto los elementos de conmutación a utilizarse en los convertidores conmutados de alta frecuencia son, invariablemente, transistores y diodos. A.1 Análisis en Conmutación de un Transistor de Potencia El análisis de disipación de potencia de los transistores que se discute a continuación aplica, tanto a transistores bipolares como a transistores MOSFET. Considere un transistor que está conmutando entre corte y saturación, teniendo una tensión de encendido igual a VON, propia del dispositivo, y una tensión de apagado VOFF, propia de la aplicación, la cual deberá ser menor a la máxima tensión drenaje-fuente o colector-emisor de apagado que soporte el transistor. La corriente de plena carga para el encendido del transistor se denotará como IM y será una corriente de colector (IC) o de drenaje (ID) según corresponda. La corriente de apagado se considera despreciable y se supone igual a cero. En la Figura Nº A.1 se representa esquemáticamente el transistor y las formas de onda de voltaje y corriente en el mismo. En las formas de onda se muestra el ciclo de encendido (ON) y el ciclo de apagado (OFF). 2 Este Anexo fue desarrollado por el profesor Geovanny Delgado. 67 Figura Nº A.1 Ciclo de encendido (saturación) y apagado (corte) de un transistor Como puede observarse en la Figura Nº A.1 un transistor que está inicialmente apagado tendrá una tensión entre sus terminales máxima, denotada por VOFF y una corriente igual a cero. Luego la potencia disipada en esta condición es, idealmente, cero. Por otra parte, en condiciones de encendido el transistor tiene una tensión entre sus terminales igual a VON y una corriente máxima. Entonces existe una potencia disipada durante el encendido del dispositivo la cual es, en general, diferente de cero, esta potencia disipada es conocida como potencia disipada en DC, o simplemente, potencia DC. Finalmente se observa en las formas de onda que durante el encendido, ciclo ON, y el apagado, ciclo OFF, existen en el transistor tanto voltaje como corriente; luego existe una potencia disipada distinta de cero durante la conmutación. Esta potencia disipada es conocida como potencia disipada en AC o simplemente potencia AC. Es claro, de las formas de onda de la Figura Nº A.1, que cuanto más cortos sean los tiempos de encendido (tON) y apagado (tOFF), menor será la potencia disipada. De igual manera, cuantas menos veces conmute el transistor tanto menor será la potencia media disipada en AC, es decir, a mayor frecuencia de conmutación, mayores serán las pérdidas en AC. 68 En general, los transistores bipolares conmutan en tiempos mucho mayores que los transistores MOSFET de potencia modernos, además, como se discute luego, las pérdidas en DC de los transistores bipolares crece conforme aumenta la capacidad de manejo de corriente de colector del transistor, es decir su tamaño. Por estas razones actualmente los transistores de potencia por elección en los convertidores conmutados son los transistores MOSFET, razón por la cual los análisis posteriores se fundamentan en transistores MOSFET de potencia. A.1.1 Disipación de potencia en DC Como se indicó anteriormente la potencia disipada en DC es aportada principalmente por el valor de la potencia de encendido del dispositivo. En el caso de los transistores MOSFET de potencia el parámetro especificado por el fabricante y utilizado en estos cálculos es la resistencia drenaje fuente de encendido, denotada típicamente como RDS(ON). Luego la potencia disipada en DC viene dada por la expresión: PdDC (Q) = RDS (ON) I Q2 (A.1-1) En el caso de los transistores bipolares (BJT) el parámetro especificado por el fabricante es el voltaje de encendido o voltaje colector-emisor en saturación, de donde la potencia disipada en DC para un transistor bipolar viene dada por la expresión: PdDC (Q) = VCE (sat)IQ (A.1-2) En las expresiones (A.1-1) y (A.1-2) el valor IQ representa la corriente promedio que circula por el dispositivo cuando está encendido. Es interesente anotar que la resistencia de encendido de un transistor MOSFET de potencia se reduce en tanto el transistor aumenta su capacidad de manejo de corriente, en tanto en un 69 transistor BJT el voltaje colector-emisor de saturación crece conforme crece su capacidad de manejo de corriente. Como un ejemplo, en la Tabla A.1, se presentan características eléctricas comparativas para un grupo de transistores de Toshiba. En esta tabla se comprueba lo anotado para los casos propuestos, además se incluyen los tiempos de encendido y de apagado como otro parámetro comparativo. Se observa cómo los transistores bipolares exhiben tiempos de encendido y apagado significativamente mayores que los transistores MOSFET. Tabla A.1 Cuadro comparativo para algunos Transistores Número de Tecnología Parte Corriente RDS(on)/ Tiempo Tiempo Máxima VCE(Sat) de de (drenaje/ encendido apagado colector) (tON) (tOFF) 2SB1375 Bipolar (PNP) 3 Amperios 1.5 voltios 1 us 1 us 2SD2012 Bipolar 3 Amperios 1 voltios 1 us 1 us 15 Amperios 3 voltios 1 us 1 us (NPN) 2SC4029 Bipolar (NPN) 2SK2274 MOSFET 5 Amperios 1.5 Ω 80 ns 240 ns 2SK2311 MOSFET 25 Amperios 36 m Ω 30 ns 55 ns 2SK2313 MOSFET 60 Amperios 8mΩ 60 ns 220 ns A.1.2 Disipación de potencia en AC Tal y como se discutió anteriormente los transistores disipan una parte importante de potencia durante la conmutación de encendido a apagado y viceversa. En esta sección se van a desarrollar las expresiones que permitan obtener los valores de esta potencia disipada. 70 Cuando un dispositivo de estado sólido conmuta, de encendido a apagado, en tanto la corriente que circula a través de él va decreciendo, el voltaje entre sus terminales se va incrementado. De igual forma cuando el dispositivo conmuta de apagado a encendido, en tanto la corriente va en aumento, el voltaje entre sus terminales se va disminuyendo. La forma y la temporización de estos fenómenos dependen de la tecnología y del dispositivo en particular. Pueden, sin embargo, plantearse modelos que representen, como una buena aproximación, esta dinámica de conmutación. En esta sección se van a presentar dos escenarios que representan la dinámica de conmutación, a saber: 9 Escenario del Mejor Caso 9 Escenario del Peor Caso A.1.2.1 Escenario del Mejor Caso El escenario del mejor caso considera que en tanto la corriente va en aumento (disminución) en un dispositivo el voltaje va decreciendo (aumentando) en idéntica proporción, tal que, la potencia disipada es la menor posible. En la Figura Nº A.2 se muestra la gráfica voltaje/corriente de conmutación para este escenario. Nótese que, en este caso, las curvas de corriente y voltaje se intersecan justamente en la mitad del barrido. Además VOFF es el voltaje de estrés o reverso al que el dispositivo es sometido cuando se apaga e IM representa la máxima corriente de conducción en encendido en régimen permanente. Figura Nº A.2 Gráfica corriente/voltaje de conmutación para el escenario del mejor caso 71 Se tiene que la potencia disipada instantánea viene dada por: Pd (t ) = v(t ) ⋅ i (t ) (A.1-3) Luego la potencia promedio se obtiene integrando la expresión (A.1-3) en un periodo completo de conmutación del convertidor. Sea este periodo indicado como T, entonces la potencia disipada en promedio en AC para el dispositivo viene dada por: T Pd (AC) = 1 Pd (t )dt T ∫0 (A.1-4) El cálculo de la potencia disipada se puede realizar analizando primero el ciclo de encendido y luego el ciclo de apagado, la potencia total disipada será la suma de las potencias disipadas durante el encendido y el apagado. A. Ciclo de encendido En la Figura Nº A.3 aparece las formas de onda para el voltaje y la corriente en el ciclo de encendido, donde se ha supuesto que el voltaje de encendido del dispositivo es mucho menor que su voltaje de apagado y por lo tanto se considera despreciable e igual a cero. 72 Figura Nº A.3 Curvas de corriente y voltaje del ciclo de encendido De las curvas de la Figura Nº A.3 se obtiene el modelo de la corriente y el voltaje en el ciclo de encendido dados por las ecuaciones (A.1-5) y (A.1-6): i (t) = IM t t ON (A.1-5) v(t) = − VOFF t + VOFF t ON (A.1-6) Entonces, sustituyendo (A.1-5) y (A.1-6) en (A.1-3) se tiene: PON (t ) = − VOFF I M 2 VOFF I M t + t 2 tON tON (A.1-7) Sustituyendo luego (A.1-7) en (A.1-4) y resolviendo la integral se obtiene: ⎛ −t2 t ∫0 VOFF I M ⎜⎜⎝ tON2 + tON tON ON d 1 ( AC ) = T ON d ⎛ − t3 t2 ( AC ) = f SVOFF I M ⎜⎜ 2 + ⎝ 3tON 2tON P P PdON ( AC ) = 1 f SVOFF I M tON 6 ⎞ ⎟⎟dt ⎠ tON ⎞ ⎟⎟ ⎠0 (A.1-8) B. Ciclo de Apagado Las curvas del ciclo de apagado aparecen en la Figura Nº A.4, donde el tiempo inicial se ha supuesto como cero dado que se busca calcular la potencia disipada y se va a sumar a la ecuación (A.1-9) como un escalar, de tal manera que pueden suponerse estas condiciones de frontera para resolver la integral. 73 Figura Nº A.4 Curvas de corriente y voltaje del ciclo de apagado De las curvas de la Figura Nº A.4, es posible también obtener el modelo de la corriente y el voltaje en el ciclo de apagado dados por las ecuaciones (A.1-9) y (A.1-10): i (t) = − IM t + IM tOFF v (t) = − VOFF t tOFF (A.1-9) (A.1-10) Se observa la simetría de este modelo con respecto al modelo del ciclo de encendido. Luego es posible operar de manera análoga para obtener: PdOFF ( AC ) = 1 f SVOFF I M tOFF 6 (A.1-11) Dado que la potencia total disipada promedio es la suma algebraica de la potencia disipada en el ciclo de encendido, más la potencia disipada en el ciclo de apagado, se obtiene: ON OFF Pd ( AC ) = P d (AC) + P d (AC) PdQ ( AC ) = 1 f S VOFF I M (t ON + t OFF ) 6 (A.1-12) 74 Entonces la potencia disipada en el dispositivo en régimen de conmutación, conocido también como régimen AC, es directamente proporcional a la frecuencia y a los tiempos de conmutación. Quiere esto decir que a mayor frecuencia de conmutación, mayores serán las pérdidas en AC. Además cuanto más lento sea el dispositivo, es decir, cuanto mayores sean sus tiempos de conmutación, tanto mayores serán las pérdidas en AC. A.1.2.2 Escenario del Peor Caso El escenario del peor caso considera que en el ciclo de encendido el voltaje va a empezar a disminuir hasta que la corriente alcance su valor máximo, en tanto en el ciclo de apagado la corriente empieza a disminuir cuando el voltaje alcance su valor de apagado. En la Figura Nº2.10 se muestra la gráfica voltaje/corriente de conmutación para este escenario. Nótese que, en este caso, las curvas de voltaje y corriente no se intersecan; aunque este caso no ocurre, en general en la práctica, es útil en tanto fija una cota superior para las pérdidas de potencia en conmutación en el peor caso. Al igual que antes VOFF es el voltaje de estrés o reverso al que el dispositivo es sometido cuando se apaga y IM representa la máxima corriente de conducción en encendido en régimen permanente. Además tRI es el tiempo de subida de la corriente (“rising current”), tFV es el tiempo de caída del voltaje (falling voltaje), tRV es el tiempo de subida del voltaje (“rising voltaje”) y tFI es el tiempo de caída de la corriente (“falling current”). Figura Nº A.5 Gráfica corriente/voltaje de conmutación para el escenario del peor caso 75 Al igual que en el escenario del mejor caso es posible realizar los cálculos considerando primero el ciclo de encendido y luego el ciclo de apagado. A. Ciclo de encendido Note que en el ciclo de encendido cuando la corriente crece linealmente el voltaje es constante e igual a VOFF; además cuando el voltaje decrece linealmente la corriente es constante e igual a IM. Entonces es posible plantear la integral para el ciclo de encendido directamente de la ecuación (A.1-4) y de las gráficas de conmutación de la Figura Nº A.5, de la siguiente manera: ON d P 1 ( AC ) = T ⎛I ∫0 (VOFF )⎜⎜⎝ t RIM t RI ⎞ t ⎟⎟dt + ⎠ ⎛ −V ∫ (I )⎜⎜⎝ t t FV OFF M 0 FV ⎞ t + VOFF ⎟⎟ dt ⎠ Resolviendo las integrales se obtiene: ON d P ⎡ t2 ( AC ) = f S ⎢VOFF I M 2t RI ⎢⎣ PdON ( AC ) = t RI 0 t2 − VOFF I M 2t FV 1 f S VOFF I M (t RI + t FV ) 2 t FV + VOFF I M t 0 t FV 0 ⎤ ⎥ ⎥⎦ (A.1-13) B. Ciclo de Apagado En el ciclo de apagado se tiene una situación análoga y complementaria. En este caso cuando el voltaje va creciendo linealmente la corriente es constante e igual a IM, en tanto cuando la corriente va decreciendo linealmente el voltaje es constante e igual a VOFF. Entonces de manera análoga al ciclo de encendido es posible resolver la integral para llegar a: PdOFF ( AC ) = 1 f S VOFF I M (t RV + t FI ) 2 (A.1-14) 76 Finalmente la potencia disipada total para el escenario del peor caso será la suma algebraica de la potencia disipada en el ciclo de encendido más la potencia disipada en el ciclo de apagado, de donde: PdQ ( AC ) = 1 f S VOFF I M (t RI + t FV + t RV + t FI ) 2 (A.1-15) Una vez más la potencia disipada, como era de esperarse es directamente proporcional a la frecuencia de conmutación y a los tiempos de conmutación del dispositivo. La mayoría de los fabricantes publican únicamente los tiempos de encendido y de apagado de los dispositivos, luego si: t RI + t FV = tON t RV + t FI = t OFF (A.1-16) La ecuación (A.1-15) se reduce a: PdQ ( AC ) = 1 f S VOFF I M (tON + tOFF ) 2 (A.1-17) Al comparar las pérdidas en el escenario del peor caso de la ecuación (A.1-17) con el escenario del mejor caso, de la ecuación (A.1-12), se observa que la cota superior es tres veces mayor que el escenario del mejor caso. Habiendo completado el análisis de potencia en régimen de conmutación, es posible escribir una expresión para la potencia total disipada en un transistor MOSFET: ⇒ Escenario del Mejor Caso: PdT (Q) = RDS (ON ) I Q2 + 1 f S VOFF I M (t ON + t OFF ) 6 (A.1-18) 1 f S VOFF I M (t ON + t OFF ) 2 (A.1-19) ⇒ Escenario del Peor Caso: PdT (Q) = RDS (ON ) I Q2 + 77 A.2 Análisis en Conmutación de un Diodo de Potencia El análisis para la disipación de potencia en los diodos aplica para cualquier tipo de diodo. De igual manera que con el transistor, el análisis para el diodo abarca el régimen de operación en DC y en conmutación o régimen AC. A.2.1 Disipación de potencia en DC Si se considera que la corriente de fuga superficial, cuando el diodo está apagado, es despreciable, la potencia disipada en DC en un diodo es una función de su barrera de potencial y de la corriente promedio que circula por el mismo cuando está encendido. La expresión para el cálculo de la potencia DC en un diodo viene dada por la expresión: PdDC ( D) = VON I D (A.2-1) La barrera de potencial de un diodo de silicio es típicamente 0.7 V, sin embargo, los fabricantes de diodos de potencia, principalmente de tecnología Schottky, han procurado desarrollar diodos de baja barrera de potencial para disminuir las pérdidas en DC en convertidores conmutados de alta frecuencia. El valor de la barrera de potencia tiende a crecer para diodos de mayor capacidad de trasiego de corriente. En la Tabla A.2, aparecen los valores de la barrera de potencial para varios diodos, todos de tecnología Schottky. Tabla A.2 Cuadro comparativo de algunas características de diodos Schottky Número de parte Máxima corriente (ID,MAX) 3FWJ49 SDP06S60 10CTQ150 40CTQ150 3A 6A 10 A 40 A Máximo voltaje Reverso (VRM) 30 V 600 V 150 V 150 V Voltaje de Encendido (VON) 0.47 V 1.5 V 1.1 V 1.16 V 78 A.2.2 Disipación de potencia en AC Al igual que en el caso de los transistores en conmutación los diodos también exhiben pérdidas en régimen AC debido a los tiempos de conmutación de encendido a apagado y viceversa. En los convertidores conmutados de alta frecuencia se utilizan los diodos de tecnología Schottky principalmente, debido a que estos son mucho más veloces para conmutar. El análisis de las pérdidas de conmutación de un diodo es semejante que para el transistor desarrollado en la sección anterior. En esta sección se divide el análisis en el mejor caso y el peor caso, este análisis es totalmente general y aplica para el caso en que el dispositivo en conmutación es un diodo. Luego es posible extender los resultados de las expresiones (A.113) y (A.1-18) para el diodo de la siguiente manera: A. Escenario del Mejor Caso Para este caso la potencia disipada por el diodo será: PdD ( AC ) = 1 f S VOFF I M (t ON + t OFF ) 6 (A.2-2) B. Escenario del Peor Caso. En el escenario del peor caso, utilizando únicamente el tiempo de encendido y el tiempo de apagado se obtiene: PdD ( AC ) = f S VOFF I M (tON + tOFF ) (A.2-3) Es importante destacar que, en virtud de que los diodos Schottky son muy veloces con relaciones de crecimiento (Slew rate) en el orden de 10,000 v/us, normalmente la potencia disipada en AC es despreciable con respecto al valor en DC. De igual forma que en el caso del transistor, es posible escribir ahora una expresión para la potencia total disipada en los dos escenarios planteados, de la siguiente manera: 79 ⇒ Escenario del Mejor Caso: PdT ( D) = VON I D + 1 f SVOFF I M (tON + tOFF ) 6 (A.2-4) ⇒ Escenario del Peor Caso: PdT ( D) = VON I D + f SVOFF I M (tON + tOFF ) (A.2-5) 80 ANEXO B Especificaciones del fabricante del transistor FQP9P25 81 ANEXO C Especificaciones del fabricante del diodo Schottky MBR40250 82 ANEXO D Especificaciones del fabricante del controlador (PWM) SG3524