simetra - Informatica3
Anuncio

SIMETRÍA
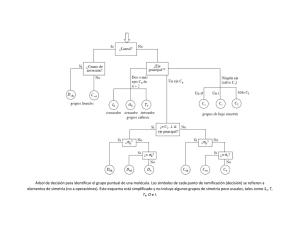
Hace algunos años trabajé en la elaboración de la estructura de este grupo de operadores en
relación con la teoría del electrón de Dirac. Posteriormente me enteré de que una buena
parte de lo que había escrito aparecía en un libro que trataba sobre la superficie cuartica de
Kummer.Resulta que en el aula donde imparto mis clases hay un modelo de la superficie
cuàrtica de Kummer, que yo solía mirar a veces con curiosidad, preguntándome de qué
podría tratarse. Lo último que podía pasárseme por la cabeza era que yo había escrito una
publicación sobre su estructura.
SIR ARTHUR STANLEY EDDINGTON, The Theory of Groups
La simetría interesa en la misma medida tanto al artista como al científico; está
íntimamente asociada con una admiración por la forma estructurada que es innata en el ser
humano. La simetría está vinculada con muchas de las formas estructuradas más profundas
de la naturaleza y hoy en día nos resulta fundamental para comprender científicamente el
universo. Los principios de conservación, tales como los relativos a la energía y al impulso
o al momento cinético expresan una simetría que ( según creemos nosotros ) posee la
totalidad del continuo espacio- tiempo: las leyes de la física son las mismas en cualquier
lugar. La mecánica cuántica de las partículas fundamentales, un mundo loco en el que un
protón se puede << girar>> para dar lugar a un neutrón, y cuyas leyes han de reflejar esta
posibilidad, se expresa mediante el lenguaje matemático de las simetrías. Las simetrías de
los cristales no sólo sirven para clasificar sus formas, sino que determinan muchas de sus
propiedades numerosas formas naturales, desde las estrellas de mar hasta las gotas de
lluvia, desde los virus hasta las galaxias, poseen llamativas simetrías.
Pero ¿ qué es exactamente la simetría? Consultemos con un experto. Muchos de los más
grandes matemáticos han realizado trabajos << de divulgación>> para presentar su materia
ante un gran público. Felix Klein escribió varios libros de divulgación, entre los que se
incluye famous problems of elementary Geometry, basados en sus conferencias de Pascua
de 1894. Henri Poincarè escribió dos bestsellers sobre filosofía y metodología de la cienciaCiencia y método y ciencia e hipótesis-, libros que han seguido publicándose hasta hoy
mismo. David Hilbert, cuando se encontraba en la cumbre de su carrera siendo el
matemático más importante del mundo, hizo un programa de radio con motivo del congreso
Internacional de matemáticos celebrado en París en 1900. Hilbert siempre sostuvo que uno
no entiende algo realmente si no es capaz de explicárselo al primero que se encuentra por
la calle. Probablemente esto sea llevar las cosas un poco demasiado lejos, pero aclara cuál
era el modo de ver las cosas que tenía Hilbert.
En 1952 uno de los discípulos de Hilbert, un distinguido matemático llamado Hermann
Weyl, estaba a punto de jubilarse en el institute for Advanced Study de Princeton.
Continuando la tradición de su maestro, Weyl dio una serie de conferencias sobre
matemáticas dirigidas al gran público. Su tema, y titulo del libro que se publicó a partir de
estas conferencias, era Symmetry. Sigue siendo un clásico entre los libros de divulgación
sobre este tema, y no hay libro que siga sus pasos que no haga referencia a él. Algunos de
los logros más importantes de Weyl están relacionados con el profundo trasfondo
matemático que constituye el fundamento del estudio de la simetría, y sus conferencias
estuvieron fuertemente influidas por sus gustos matemáticos: sin embargo, Weyl era
también una autoridad en arte y filosofía , lo mismo que lo era en matemáticas y ciencia. He
aquí como comenzaba su primera conferencia:
Si no me equivoco, el término simetría se utiliza en nuestro lenguaje cotidiano con dos
Significados diferentes. Por una parte simetría significa algo así como bien
proporcionado, muy equilibrado, y la palabra simetría denota además ese tipo de concordancia
de las distintas partes mediante la cual éstas se integran en un todo. La belleza está vinculada
con la simetría...La idea del equilibrio enlaza de forma natural con el segundo significado que
tiene el término simetría en estos tiempos modernos: simetría bilateral, la simetría de la
izquierda y la derecha, que es algo tan evidente en la estructura de los animales superiores,
especialmente en el cuerpo humano .Ahora bien, esta simetría bilateral es estrictamente
geométrica y, en contraposición con la vaga noción de simetría anteriormente mencionada, un
concepto absolutamente preciso.
Es este segundo, y matemático, significado de la palabra simetría el que interesaba a Weyl en su obra
profesional, aunque, como persona intelectualmente sensible, no era en absoluto inmune a los encantos del
primer significado. Y es precisamente la simetría en sentido matemático la cuestión que tenemos que intentar
aclarar ahora, incluso en el caso de que los motivos por los que nos interesa pudieran ser principalmente
estéticos. La belleza es para muchos matemáticos una fuerza motriz, pero, no obstante, les gusta ahondar bajo
su superficie y hacer de ella algo preciso, aunque los resultados de sus excavaciones puedan no poseer el
mismo atractivo inmediato para el resto de los miembros de la especie humana.
La humanidad tardó aproximadamente unos dos mil quinientos años en alcanzar una formulación precisa del
concepto se simetría. Si contamos a partir de la época en que los geòmetras griegos realizaron los primeros
descubrimientos matemáticos serios sobre dicho concepto, fundamentalmente la demostración de que existen
exactamente cinco cuerpos sólidos regulares. Sólo después de aquel largo período de gestación llegó a ser el
concepto de simetría algo que los científicos y matemáticos podían utilizar, en vez de limitarse a admirarlo.
HA CAMBIADO, PERO ESTÀ IGUAL
En su uso cotidiano, la simetría es una propiedad estética; sin embargo, sólo un matemático temerario se
atrevería a intentar definir formalmente tal punto de vista. ¿ Existe algún concepto matemático en el que se
incluyan al menos algunas de las características principales de la simetría en su sentido convencional, y que,
sin embargo, pueda ser sometido a un análisis riguroso? Sí existe. Hemos preparado ya sus fundamentos al
realizar el estudio de la salpicadura de leche, de forma que ahora va a ser mucho más fácil para nosotros ver lo
que los matemáticos eludieron durante tanto tiempo. Para ellos la simetría no es un objeto, sino una
transformación. Aunque no una transformación cualquiera: una simetría de un objeto es una transformación
que deja su aspecto aparentemente igual .Decimos << aparentemente>> porque, aunque después de la
transformación la forma general del objeto es la misma de antes ,sin embargo, el objeto se ha movido. Por
fuerza ha tenido que hacerlo, ya que si no la transformación no tendría ningún interés.
Por ejemplo, supongamos que existe una forma ideal del cuerpo humano en la que el lado izquierdo
exactamente igual que el lado derecho. ¿ Exactamente? Bueno, si tuviéramos el pie izquierdo exactamente
igual al pie derecho, necesitaríamos dos zapatillas del pie derecho y no importaría qué zapatilla nos
pusiéramos en cada pie. Ciertamente, los dos lados no son exactamente iguales: coinciden si se superponen las
dos mitades una encima de la otra. Por eso, cuando un ser humano se mira en un espejo, aparece en éste la
imagen de un ser humano. En los seres humanos reales existen sutiles diferencias entre ambos lados: por
ejemplo, el corazón de la imagen de una persona en un espejo no está en el lado en que debería estar; además,
en un mundo poblado por estas imágenes la mayoría de los individuos serían zurdos. Dejaremos los aspectos
químicos y biológicos de la asimetría animal para un posterior estudio que realizaremos en el capítulo 7,
donde encajarán de forma natural en el desarrollo de nuestro tema. Nuestro objetivo inmediato es formular un
modelo matemático que capte la simetría bilateral que percibimos en la forma humana.
Resumiendo, cuando decimos que << el lado izquierdo es igual que el derecho>>, lo que queremos decir es
que, si la mitad de la izquierda se refleja en un espejo, se obtiene la mitad de la derecha. Ahora bien, la
reflexión es un concepto matemático; pero no es, sin embargo, una forma geométrica, ni un número, ni una
fórmula. Se trata de una transformación, es decir, una norma para el movimiento de objetos. Imaginemos un
dibujo artístico del cuerpo humanó, con una simetría bilateral perfecta ( figura 2.1 ). Dibujemos una línea
recta que lo cruce de arriba abajo por la mitad y hagamos una reflexión de tal manera que la línea no se
mueva, pero haya un intercambio se la parte izquierda y la parte derecha. Tras hacer esto- aunque todos y
cada uno de los puntos se han movido hacia posiciones diferentes- la forma sigue teniendo el mismo aspecto
que antes. Llamamos eje de simetría de la figura a la línea en torno a la cual se realiza el movimiento.
Esto nos proporciona una caracterización matemática precisa de la simetría bilateral: una figura posee simetría
bilateral cuando existe alguna reflexión respecto a la cual es invariable, es decir, aparentemente no cambia.
Cierto es que esta definición formal de la simetría no capta demasiado bien sus aspectos estéticos- una figura
espantosamente fea puede poseer simetría bilateral en el sentido matemático; por encontrar, algunas
imperfecciones que destruyen la simetría matemática pueden añadir a la figura un cierto valor estético- sin
embargo, no es nuestra intención reducir el arte a las matemáticas. Dicho sea de paso, toda figura posee una
simetría << trivial >>, pero esto no resulta demasiado interesante. Sin embargo, aunque esta simetría sea
trivial, tiene la importancia suficiente como para recibir un nombre: identidad. Las figuras que son
bilateralmente simétricas poseen dos simetrías: la identidad y la de colocar una mitad sobre la otra.
LA AMBICIOSA ESTRELLA DE MAR
Existen otras variedades de formas simétricas como, por ejemplo, la estrella de mar de cinco brazos. Una vez
más, estamos pensando en un caso ideal: el de una estrella de mar que tuviera sus cinco brazos idénticos. ¿
Cuáles son las transformaciones correspondientes? La más obvia es la que hace que cada brazo << gire hasta
el lugar del siguiente >>, es decir, una rotación mediante un ángulo de 72ª ( la quinta parte de una vuelta
completa ) ( figura 2.2 a ). Si dejamos una estrella de mar encima de una mesa y, mientras estamos de
espaldas, alguien la hace girar 72ª, no notaríamos que hubiera sucedido nada. Sin embargo, si la hace girar
45ª, por ejemplo, notaríamos un cambio en su orientación. Existen exactamente cinco ángulos diferentes
mediante los cuales se puede hacer girar una estrella de mar sin que se pueda detectar cambio alguno:
0ª,72ª,144ª, 216ª y 288ª, o sea, los múltiplos enteros de la quinta parte de un giro completo. En general,
decimos que una estrella de mar posee simetría de rotación de orden cinco. Las rotaciones que se realizan en
el plano no tienen eje, pero sí un punto especial, el centro de rotación, que no se mueve en absoluto. Como su
mismo nombre indica, es el punto que se encuentra situado justo en el centro de la estrella de mar.
Dichas rotaciones son las simetrías más destacables que posee una estrella de mar, pero en realidad tiene más,
ya que su reflejo en un espejo sigue teniendo el aspecto de una estrella de mar. Cada una de sus extremidades
posee simetría bilateral, y el eje de simetría de cada brazo pasa por el centro de simetría de rotación, de modo
que, al igual que nosotros, la estrella de mar posee simetría bilateral. En efecto, este ambicioso animal tiene
cinco simetrías bilaterales diferentes, ya que son cinco sus brazos y cada uno de ellos tiene su propio eje de
simetría. Existen cinco reflexiones diferentes respecto a las cuales la estrella de mar es invariable y sus ejes
forman entre sí ángulos de 72ª ( figura 2.2 b ).
En total, la estrella de mar posee exactamente diez simetrías. ( Por motivos similares, la salpicadura de la gota
de leche, de la que hablábamos en el capítulo 1, tiene 48 simetrías: 24 rotaciones y 24 reflexiones. )
Este punto de vista, es decir, que los objetos poseen no sólo simetría, sino. Simetrías ( transformaciones
respecto a las cuales son invariables ), significa que los matemáticos no se limitan a plantear sencillamente
una definición cualitativa de la simetría, sino que esto tiene también un aspecto cuantitativo. Podemos
demostrar que la simetría de una estrella de mar es diferente de la de un ser humano; ya que la estrella de mar
tiene diez simetrías y nosotros solamente tenemos dos. Desde luego, es cierto que todo esto no es en sí más
que una conclusión espectacular. Sin embargo, la posibilidad de abordar la simetría de una forma sistemática
con el fin de comparar las simetrías de distintos objetos es, en efecto, un instrumento muy poderoso. Por
ejemplo, vamos a ver en breve cómo un joven francés demostró que las ecuaciones de quinto grado no se
pueden resolver mediante ninguna fórmula, debido únicamente a que tienen la simetría que no debieran tener.
¿ QUÈ ES UNA TRANSFORMACIÓN?
Antes de seguir adelante, sería lo mejor en este momento dar un paso hacia atrás y comenzar por explicar qué
es una transformación. De hecho, lo que vamos a hacer es dar un paso todavía más hacia atrás y explicar qué
es una explicación, en lo que concierne a este libro. Es necesario que nos pongamos de acuerdo con respecto a
ciertas reglas básicas. Si no lo hacemos así, cuando estemos intentado definir, en un lenguaje necesariamente
vago y florido, cómo es la idea que se esconde tras un concepto matemático, el lector estará imaginando que
las matemáticas son algo vago y florido, y preguntándose qué ha sido de su legendaria precisión. La regla
básica principal es que, precisamente porque no queremos aburrir al lector con detalles técnicos, tendremos
que discutir sobre los conceptos mediante ejemplos y analogías, en vez de dar las definiciones matemáticas
auténticas que el lector encontraría en los libros de texto.
Por ejemplo, existe una definición matemática precisa y rigurosa de lo que es una transformación, que está
basada en la teoría de conjuntos. Para dar una idea de cómo es, digamos que empieza con algo así como:
<<Una función es un subconjunto del producto cartesiano de dos conjuntos que cumple las tres propiedades
siguientes...>>. Como se ve, es tan técnica que ni siquiera utiliza la palabra << transformación >>. Nuestro
propósito es evitar atascarnos en semejante maraña, ya que se necesitan varios años de aprendizaje para poder
apreciar lo maravillosamente sencilla e iluminadora que es. ( Realmente lo es. Pregúnteselo a cualquier
matemático. En matemáticas, como en la filosofía zen, el proceso que conduce a alcanzar la iluminación es
largo y penoso.) Si fuera fácil dominar todos los tecnicismos de los conceptos matemáticos, no hubiera sido
necesario que Weyl escribiera su obra maestra, ni que nosotros emprendiéramos la redacción del libro que el
lector tiene en sus manos.
Fin de la diatriba. Presuponiendo que estamos de acuerdo todos con estas reglas básicas, podremos decir ya
qué es una transformación. Básicamente se trata de una receta para realizar movimientos de objetos. A Cada
posible objeto, la transformación le asocia un segundo objeto: su imagen. Supongamos, por ejemplo, que esos
objetos son números y que la transformación es << asociar a cada numeró su opuesto ( negativo)>>. Así, la
imagen de un número, digamos el 7, sería su opuesto, -7. Está tirado. Obsérvese que hemos dicho que una
transformación es una receta: se trata de un proceso para determinar la imagen, no de la imagen misma. Este
proceso en concreto se puede expresar algebraicamente como la orden << multiplicar por –1>> y esto es lo
que determina la transformación; pero –7 es sólo un número. Se << conoce >> una transformación cuando se
puede obtener la imagen de cualquier objeto inicial.
Para captar mejor la idea, es conveniente pensar que una transformación simétrica es un movimiento: tómese
el objeto, cámbiese su posición y colóquese de nuevo << sobre él mismo >>, es decir, en el mismo lugar en
que estaba al principio. Es costumbre pensar en los números como si estuvieran dispuestos a lo largo de una
línea recta, estando situados los negativos en la parte izquierda y los positivos a la derecha. La definición
algebraica de la transformación anteriormente mencionada era << multiplicar por –1 >>. Esto intercambia los
lugares de los números negativos y positivos, es decir, intercambia las mitades izquierda y derecha de la recta
numérica: dicho geométricamente, se trata de una reflexión. ( A veces se prefiere pensar que es una rotación:
basta con hacer girar la Línea recta mediante un ángulo de 180ª en torno a su punto central. Volveremos a esta
cuestión más adelante. ) Fue Renè Descartes quien descubrió esta dualidad: todo objeto geométrico tiene una
definición algebraica, toda fórmula algebraica determina un objeto geométrico. Los seres humanos tienden a
utilizar la versión algebraica para los cálculos y la geométrica para imaginarse las cosas.
Hay algo aún más importante que debemos entender en relación con este tipo de imágenes: la única
información que tiene importancia es la correspondencia entre los puntos iniciales y sus imágenes mediante
este << movimiento >>. Lo que sucede entre ambas puede ayudar a visualizar esta correspondencia, pero no
forma parte del significado de la palabra << transformación>>. Se puede mantener la estrella de mar sobre la
mesa mientras se efectúa la rotación, o se puede cogerla, darle la vuelta hacia arriba y hacia abajo entre las
manos y volver a colocarla finalmente en una posición girada. Puede que la estrella de mar prefiera la primera
sucesión de acontecimientos, pero para las matemáticas esto es indiferente: la única cosa importante es que
cuando la estrella haya terminado de moverse cada punto haya sufrido un giro mediante un ángulo de 72ª.
MOVIMIENTOS
R Ì G I D O S
La mayor parte de los tipos de transformaciones de los que estamos hablando son movimientos rígidos en el
espacio. En ellos los << objetos >> son los puntos del espacio: generalmente, el espacio tridimensional
ordinario, aunque también pueden ser espacios de cualquier otra dimensión. << Rígidos >> significa que la
distancia entre los puntos al terminar es la misma que había inicialmente; es decir, las imágenes respectivas de
dos puntos están a la misma distancia que estaban los mismos puntos. La palabra << movimiento >> es,
teniendo en cuenta lo que acabamos de decir, sencillamente un término conveniente para definir un proceso,
relacionado con la experiencia cotidiana, que da lugar al resultado final esperado.
Comencemos con un espacio unidimensional: una línea recta. ¿ Cuáles son sus posibles movimientos rígidos?
Básicamente, hemos de tomar la línea recta, sin doblarla, ni estirarla, ni comprimirla, y volver a colocarla
sobre sí misma. ¿ Cómo podemos hacer esto? Tómese una regla o un lápiz, que son unas aproximaciones de la
recta bastante buenas siempre que nos imaginemos que se alargan hasta el infinito, y hágase el experimento.
Se podría, por ejemplo, deslizar la recta longitudinalmente, bien hacia la izquierda o bien hacia la derecha. Si
un punto se mueve, pongamos por caso, cinco unidades hacia la izquierda, entonces la rigidez implica que
todos los puntos se han de mover cinco unidades hacia la izquierda. Así pues, la receta es para cada punto
<< moverse cinco unidades hacia la izquierda >>. Una transformación de este tipo recibe el nombre de
traslación ( figura 2.3a ).
¿ Qué más podríamos hacer? Podríamos tomar las dos mitades de la línea recta e intercambiarlas, colocando
la derecha a la izquierda y la izquierda a la derecha sobre la misma recta. Esto es lo que llamamos reflexión
( figura 2.3b).
Quizás conozca el lector la fantasía matemática de Edwin A. Abbott titulada Flatland ( El país plano o
Planilandia ), que trata en su mayor parte sobre unas criaturas poligonales que viven en un plano. De cualquier
manera, diremos que en uno de sus capítulos el protagonista, llamado A. Cuadrado, realiza un viaje a
Lìnealandia, un mundo unidimensional habitado por animales con forma de punto. Un ser llamado Cosa
Puntual que viviera en Lìnealandia y se mirara en un espejo puntual, vería cómo la parte de la línea recta
situada detrás de él aparece detrás de su imagen en el espejo, es decir, extendiéndose hacia la dirección
opuesta. ( En realidad, la imagen de Cosa Puntual taparía la vista de esta recta, salvo que Cosa fuera
transparente, pero no nos andemos con pedanterías. )
No es difícil ver que estos son los únicos movimientos rígidos posibles de una línea recta: trasladarse una
cierta distancia o efectuar una reflexión respecto a algún punto determinado. Pensemos en estas posibilidades.
Si se coloca la recta de nuevo en su sitio sin intercambiar sus extremos, entonces lo único que se puede hacer
es deslizarla ( una traslación ): si intercambiamos los extremos, existirá algún punto respecto al cual se realiza
el giro y este punto no se moverá en absoluto; ahí es precisamente el lugar donde Cosa Puntual colocó su
espejo para efectuar una reflexión.
Y ¿ qué sucedería en dimensión dos? Ahora habría que tomar todo un plano y situarlo de nuevo, pero
podemos hacer los experimentos con una hoja de papel. Existen en este caso movimientos análogos a las
traslaciones: deslizamiento de la totalidad del plano a una distancia determinada en una dirección también
determinada
( figura 2.4 a ). Por ejemplo, << Dos unidades hacia el norte y seis hacia el oeste >>. Hay que señalar que,
cuando utilizamos una definición como esta, hemos de especificar dos distancias: una para cada una de las dos
direcciones perpendiculares. Esto se debe a que el plano es un espacio bidimensional. De hecho es
exactamente lo que los matemáticos quieren decir cuando hablan de << espacio bidimensional >>: este
espacio está dotado de un sistema de coordenadas en el que se utilizan dos números para determinar cada
punto. Lo mismo que se puede deslizar, el plano se puede también girar, mediante un ángulo ( figura 2.4 b ).
La manera más sencilla de realizar esto es elegir un punto determinado y empeñarse en que se mantenga fijo.
Tómese una hoja de papel, póngase sobre un tablero y clávese una chincheta en algún lugar de dicho papel. A
continuación se le hace girar, manteniéndolo apoyado sobre el tablero. Esto sería una rotación y la chincheta
sería su centro. Podría parecer que se consigue otra cosa deslizando el plano al mismo tiempo que se le hace
girar; sin embargo, de hecho, cualquier movimiento de ese tipo tiene también un punto fijo en algún lugar:
sería sencillamente una rotación en torno a otro punto diferente.
Las traslaciones y las rotaciones mantienen siempre el mismo lado del plano hacia arriba. No obstante, el
plano se puede también volcar hacia un lado o sobre sí mismo, con lo que se obtendrían reflexiones ( figura
2.4 c ). Esta vez, serían reflexiones respecto a alguna línea recta. Dibujemos una línea recta horizontal que
cruce la hoja de papel exactamente por la mitad. Volvamos a trazar la misma línea por la parte de atrás de la
hoja, de manera que podamos ver una línea recta igual por ambos lados. Volquemos la hoja de papel llevando
la parte superior a la inferior y viceversa, de manera que la hoja quede colocada en la misma posición
anterior. Observemos que la línea recta sigue estando en el mismo lugar; de hecho, todos los puntos de la
línea recta permanecen donde estaban y todos los demás puntos se han movido Los puntos que inicialmente
se encontraban por encima de la línea se encuentran ahora por debajo, y todos los puntos que se encontraban
por debajo han pasado finalmente a estar por encima. La línea recta, y solamente ella, permanece fija.
Para comprobar que se trata realmente de una reflexión ( a pesar de lo que hemos hecho con el papel, que ha
sido una rotación en el espacio tridimensional ) imaginemos que A. Cuadrado, residente en Planilandia, se
mira en un espejo que está colocado a lo largo de la línea que hemos dibujado. Un punto situado a tres
unidades de distancia por debajo del espejo tendrá una imagen que está situada tres unidades por encima de él,
que es exactamente donde ha ido a parar cuando hemos volcado la hoja sobre sí misma. Busquemos un espejo
de bolsillo, coloquémoslo a lo largo de la línea sobre la hoja de papel y podremos comprobarlo.
Existen muchas reflexiones posibles en el plano, ya que cualquier línea se puede utilizar como espejo. No es
preciso que estén trazadas horizontal o verticalmente: podrían ser oblicuas.
¿ Nos dejamos algo? Desde luego que si: tenemos la posibilidad de combinar una traslación con una reflexión.
Generalmente esto no produce en realidad nada nuevo, aunque sí lo haría si la traslación fuera paralela al
espejo. En ese caso daría lugar a un movimiento llamado reflexión con deslizamiento ( figura 2.4 d ),
fenómeno con el que ya nos hemos tropezado anteriormente al hablar del flujo de aire que circula en torno a
un camión. He aquí el lote completo de transformaciones en el plano: traslaciones, rotaciones, reflexiones y
reflexiones con deslizamiento.
Vayamos a la dimensión de tres. De nuevo tenemos las traslaciones, para las que esta vez es preciso
especificar tres números ( << Dos unidades hacia el norte, seis hacia el oeste y cinco hacia arriba>> ).Están
también las rotaciones, que ahora no tienen solamente un punto fijo, sino también un eje fijo: una línea recta
que pasa por dicho punto y actúa como un eje en torno al cual gira el resto del espacio. Y también existen
reflexiones, que aquí se realizan sobre planos que actúan como espejos, como los que son habituales en la
vida cotidiana. Bueno, y también hay reflexiones con deslizamiento. ¿ Algo más? Desde luego, siempre hay
algo más... Si se combina una rotación en torno a un eje con una traslación paralela a dicho eje, entonces se
obtiene un movimiento helicoidal conocido como tornillo ( figura 2.5 ), con el que ya nos hemos encontrado
cuando hablábamos de la corteza en espiral de un árbol. Este es el lote completo de transformaciones.
Las reflexiones, así como las transformaciones que incluyen reflexiones como en el caso de las reflexiones
con deslizamiento, tienen un aspecto ligeramente paradójico. No se pueden aplicar tomando un objeto y
desplazándolo. Si esto fuera posible, las fabricas podrían limitarse a producir botas para el pie izquierdo y
dejar para el cliente la tarea de darle vueltas a la bota hasta que se convirtiera en una bota para el pie derecho
.Sin embargo, es posible que el lector se haya dado cuenta de que cuando hablamos de la reflexión en el plano
sugeríamos que se aplicara un giro a la hoja de papel. ¿ Nos equivocamos entonces? Aceptamos que somos
capaces de cometer errores, pero << no >> lo hicimos. La razón es sutil y curiosa. La rotación que
utilizábamos para dar la vuelta al papel lo levantaba sacándolo de su plano original .Se trataba de una
rotación en el espacio tridimensional. Cuando volvíamos a dejar el papel sobre su plano, el resultado final era
exactamente el de una reflexión en el espacio bidimensional.( Tenemos que imaginarnos un papel matemático
de espesor cero: los punto están dentro de él, no sobre cada uno de sus lados.) Y hemos insistido en que una
transformación ha de ser considerada según su efecto final, no por lo que sucede en el proceso que se ha
seguido.
Las reflexiones que se realizan en el espacio tridimensional parecen en un primer momento diferentes: en este
caso se puede encontrar una rotación que da el mismo resultado. Immanuel kant consideró que esto tenía un
profundo significado filosófico. Michael Flanders y Donald Swann se limitaron a escribir una canción que no
era tan profunda, Misalliance ( Mal casamiento ), basada en un caso de amor imposible entre dos enredaderas
de especies distintas:
Para los padres de la Madreselva fue toda una conmoción.
<< La familia de las correhuelas- exclamaron- es de una estirpe inferior. Son una gente inculta, sin educación.
Mientras nosotros nos enroscamos hacia la derecha, ellos se enroscan hacia la izquierda >>.*
Pero las apariencias engañan. Un habitante de Planilandia no puede girar un plano y obtener el mismo efecto
que si hubiera realizado una reflexión; sin embargo, un habitante de Espacilandia sí que puede. De igual
manera, un habitante de Espacilandia no puede convertir un sólido en su imagen en el espejo aplicándole una
rotación- pero esto si puede hacerlo una criatura que disponga de un espacio de cuatro dimensiones. ( Tales
criatura existen. ¿ Quiénes son? Lo diremos más adelante.) En el espacio de cuatro dimensiones es posible
tomar un objeto tridimensional y – como en el caso de la hoja de papel- girarlo en la cuarta dimensión para
obtener la reflexión de dicho objeto. De hecho, las reflexiones realizadas en un espacio que tenga una
dimensión cualquiera se pueden considerar rotaciones en un espacio cuya dimensión sea una unidad más.! Ah,
sí!, Se me olvidaba, esas criaturas que tienen a su disposición un espacio de cuatro dimensiones son los
matemáticos, por supuesto.
EL CONCEPTO DE GRUPO
La idea de que el mejor enfoque para las simetrías era considerarlas como transformaciones surgió cuando los
matemáticos se dieron cuenta de que el conjunto de simetrías de un objeto no era solamente una colección
arbitraria de transformaciones, sino que tenía una hermosa estructura interna.
Volvamos al ejemplo de la estrella de mar. Sabemos ahora que existen diez transformaciones distintas que
dejan invariable una estrella de mar: cinco rotaciones ( una de ellas trivial ) y cinco reflexiones ( figura 2.6 ).
Supongamos que se aplican consecutivamente dos de estas transformaciones. Cada una de ellas
aparentemente no cambia nada en la estrella de mar, por lo que el resultado final es que aparentemente no ha
cambiado nada. Es decir, el resultado de realizar dos transformaciones simétricas sucesivas ha de ser otra
transformación simétrica. Por ejemplo, hagamos que la estrella realice un giro de un quinto de vuelta
completa y a continuación otro de dos quintos de vuelta completa.
*{To the Honeysuckle’s parents it came as a shock./ ‘ The bindweeds ’they cried, ‘are inferior stock./They’re
uncultivated, of bredding bereft./ We twine to the right, and they twine to the left!’}.
¿ Qué resultado obtenemos? Está claro que la combinación de estas dos rotaciones tiene exactamente el
mismo efecto que girarla tres quintos de vuelta completa. Y resulta que esta es precisamente otra de las
simetrías de la estrella de mar. Pensándolo un poco podemos darnos cuenta de que esta propiedad se puede
generalizar ampliamente: dada una forma cualquiera y dos de sus simetrías, si combinamos ambas, el
resultado ha de ser otra simetría. El razonamiento para explicar esto es sencillo: una simetría es una
transformación que no ocasiona cambios en el objeto ,es decir, después de aplicarle la simetría tiene el mismo
aspecto que tenía al principio y se vuelve a colocar en el mismo lugar que ocupaba antes. Tómese el objeto y
aplíquese la primera simetría: no se observa ningún cambio. Después se le aplica la segunda simetría: sigue
sin apreciarse ningún cambio. Por lo tanto, después de aplicarle ambas simetrías, no se observa cambio
alguno .Esto significa que la combinación de dos simetrías es ella misma una simetría. Si dejamos algo
invariable dos veces, el resultado es que lo dejamos invariable.
Este hecho lo expresamos diciendo que las simetrías de un objeto forman un grupo. Un grupo es un sistema
de transformaciones cerrado :siempre que se combinan dos de ellas, el resultado es otro elemento del mismo
grupo. A este grupo en concreto le llamamos grupo de simetrías del objeto. En el lenguaje vulgar, un grupo es
simplemente un montón, es decir un cierto número de cosas ( a menudo de personas ) que están juntas .En
matemáticas, la palabra que se aplica a una colección de objetos sin estructura es << conjunto >>; pero la
palabra grupo tiene un significado más específico: un conjunto de transformaciones que lleva añadida la
estructura que le viene determinada por la posibilidad de combinar sus elementos en parejas .La mayoría de
los conjuntos de transformaciones no constituyen un grupo. Por ejemplo, tomemos el conjunto formado por
sólo dos transformaciones de una estrella de mar: la rotación mediante solamente uno o dos quintos de la
vuelta completa. Cuando las combinamos y obtenemos una rotación mediante tres quintos de un giro
completo, nos salimos del conjunto. Sin embargo, un grupo ha de ser << cerrado >>: no se puede ir fuera de
él al combinar transformaciones que estén contenidas en ese conjunto. Por lo tanto, si un grupo contiene las
rotaciones que se realizan girando un quinto y dos quintos de la vuelta completa, entonces ha de contener
también la rotación que gira tres quintos de la vuelta completa. Es más, al combinar un giro de un quinto con
el << nuevo >> giro de tres quintos resulta que también ha de contener una rotación mediante un giro de
cuatro quintos de la vuelta completa. ¿ Se termina esto aquí? Todavía no: si combinamos la rotación efectuada
mediante cuatro quintos de una vuelta completa con la rotación mediante un quinto de vuelta completa, vemos
que también ha de contener la rotación de cinco quintos de una vuelta, que produce el mismo efecto que una
rotación de cero grados, es decir, la transformación trivial que deja cada punto donde estaba al principio.
En efecto, si todo lo que sabemos inicialmente es sólo que un cierto grupo contiene una transformación, a
saber, la rotación mediante un giro de un quinto de la vuelta completa, entonces podemos combinar esta
rotación consigo misma para deducir que el grupo también contiene la rotación de dos quintos de una vuelta
y, por la misma razón, las de tres, cuatro y cinco quintos ( que equivale a cero en Estrellilandia ). << Dadles la
mano y se tomarán el brazo>>, dice el proverbio. Así son precisamente los grupos: si les damos una mano la
combinarán consigo misma todas las veces que haga falta hasta conseguir un brazo de varios palmos.
E L À L G E B R A E N E S T R E LL I L A N D I A
Como hemos visto, los grupos son unos conjuntos de transformaciones muy especiales, por lo que el hecho de
que las simetrías de un objeto formen un grupo es significativo. Sin embargo, es un hecho tan simple
y<<obvios>> que durante siglos nadie se dio cuenta de ellos; e incluso cuando llegaron a darse cuenta, les
llevó un cierto tiempo a los matemáticos el apreciar sencillamente lo significativa que resulta esta simple
observación, que conduce a una natural y elegante << álgebra >> de la simetría, conocida por el nombre de
teoría de grupos. He aquí una pequeña muestra de lo que encierra este concepto, que será suficiente para
constatar que << álgebra >> es una palabra de lo más notable. Hemos visto que una rotación de un quinto de
vuelta completa combinada con la rotación de dos quintos de vuelta da como resultado una rotación de tres
quintos. Simbólicamente, esto se puede escribir ( en unidades de << una vuelta completa >>)
1 2 3
+ = ,
5 5 5
Que es una ecuación bastante normal. Sin embargo, la teoría matemática de los grupos de simetrías no es
realmente tan sencilla como todo esto. Imaginemos una rotación de tres quintos de vuelta completa y luego
otra de dos quintos. El resultado de ambas es una vuelta completa; sin embargo, lo que esto hace en realidad
es dejar a la estrella de mar exactamente en el mismo sitio en que estaba al principio. Si pensamos solamente
a dónde van a parar los puntos, y no cómo han llegado hasta allí, todo esto es lo mismo que no efectuar
<<ninguna rotación >> En otras palabras,
3 2
+ = 0 en el ámbito de las simetrías de una estrella de mar.
5 5
Como entretenimiento, y para asegurarnos de que se ha entendido la cuestión, recórtese una estrella de mar de
papel y véase lo que sucede al combinar dos de estas simetrías de reflexión. ¿ Se obtiene otra reflexión? Si no
es así, ¿ qué es lo que se obtiene? ¿ Existe algún modo sencillo de ver, cuál ha de ser la respuesta a la primera
pregunta?
La teoría matemática de los grupos de simetrías se vuelve mucho más complicada cuando las
transformaciones tienen lugar en el espacio tridimensional. Por ejemplo, hablaremos en el capítulo 4 del
descubrimiento de que hay exactamente 230 clases distintas de grupos de simetría en los cristales. ¡ Y se
supone que, en teoría, los cristalògrafos han de conocer a fondo las características matemáticas individuales
de cada uno!
EL SABIO JUGADOR
Los conceptos que son tan sencillos y, a la vez, tan profundos como estos no surgen porque la gente se quede
sentada preguntándose << ¿ qué es la simetría? >>.Se presentan cuando aparecen indicios de la idea general a
partir del planteamiento de importantes problemas. Uno de los primeros teoremas matemáticos sobre la
simetría lo descubrieron los antiguos griegos: fue la culminación del texto de geometría en varios tomos
escrito por Euclides, titulado Elementos. Euclides demostró que existen exactamente cinco sólidos regulares
( figura 2.7 ). Un sólido se considera regular cuando sus caras son polígonos regulares idénticos y el conjunto
de los polígonos que comparten cada vértice es el mismo. Un polígono regular es, a su vez, una figura
formada por segmentos de recta de igual longitud, que forman entre sí ángulos iguales. Los cinco sólidos
regulares son los siguientes:
-
el tetraedro, que tiene cuatro caras triangulares;
el cubo, que tiene seis caras cuadradas;
el octaedro, tiene ocho caras triangulares;
el dodecaedro, que tiene doce caras pentagonales;
el icosaedro, que tiene veinte caras triangulares.
Platón ya conocía los sólidos regulares, por lo que a menudo reciben el nombre de sólidos platónicos alto
grado de simetría armonizaba con las tendencias filosóficas de Platón. Un Dios Geómetra no podía
privarse del uso fundamental de unas formas tan elegantes. Sin embargo, no existe ninguna evidencia de
que tanto Platón como Euclides dispusieran de una formalización matemática del concepto de simetría:
en ambos casos parece ser que el atractivo de los sólidos regulares fue primordialmente una cuestión
estética.
Paradójicamente, la fuente de la que surgió el concepto de grupo no fue la geometría, sino el álgebra: la
resolución de ecuaciones. A muchos de nosotros nos hablaron en la escuela sobre las ecuaciones
cuadráticas- en ellas aparece no sólo una incógnita, sino también su cuadrado- y los que oyeron hablar de
este asunto quizás recuerden todavía que existe una fórmula para hallar su solución. El proceso que lleva
hasta esa fórmula, aunque no la fórmula en sí, era conocido ya por los antiguos babilonios en el año 1600
a.C., un elocuente testimonio de la velocidad con la que los conceptos matemáticos impregnan la cultura
humana. Después de las ecuaciones cuadráticas vienen las cúbicas, en las que aparece el cubo de la
incógnita, además de su cuadrado y su primera potencia. Una fórmula similar, pero más complicada, para
resolver estas ecuaciones es la que aportaron dos matemáticos del Renacimiento, Scipio del Ferro y
Niccolò Fontana ( apodado Tartaglia, << el Tartamudo >>. En aquellos tiempos las matemáticas eran un
juego competitivo, ya que la ley del más fuerte y el eventual mecenazgo de la nobleza se decidían en
exhibiciones públicas de habilidad calculìstica- como, por ejemplo, resolver las ecuaciones que el
oponente planteaba- y, por eso, al principio estos matemáticos mantuvieron sus métodos en secreto. Sin
embargo, Fontana se los reveló a Girolamo Cardano, el << el sabio jugador>> y una de las figuras más
pintorescas de la historia de la ciencia, haciéndole jurar que guardaría el secreto. Cardano no tardó en
publicarlos ( aunque reconociendo que el mérito era de su descubridor ) en su libro de álgebra Ars
Magna en el año 1545. En este libro se publicaba también una fórmula aún más horrenda para resolver
las ecuaciones cuàrticas- aquellas en que aparece la potencia cuarta de la incógnita- cuyo hallazgo se
debía a Ludovico Ferrari, un alumno de Cardano.
¿ Vino a continuación la ecuación de quinto grado- con la potencia quinta- y una fórmula aún más
horrenda?
Afortunadamente, no. Durante cerca de tres siglos los matemáticos se esforzaron por conseguirlo, hasta
que hacia 1770 Joseph- Louis Lagrange empezó a divisar la luz. Demostró que las fórmulas para la
resolución de las ecuaciones cuadrática, cúbica y cuàrtica se reducen todas ellas a un único truco general
y que ese truco no funciona en el caso de las de quinto grado. Por supuesto, podría existir otro truco que
funcionase; pero nadie ha podido encontrar ninguno y la idea de Lagrange definía con precisión la
naturaleza de este problema. El truco, según dijo Lagrange, consiste en estudiar reordenaciones,o
permutaciones, de las supuestas soluciones de la ecuación. Por ejemplo, las tres soluciones a, b, y c de
una ecuación cúbica se pueden permutar en general de seis maneras: abc,acb,bacbca,cab y cba. En 1824,
siguiendo esta idea, Niels Hendrik Abel consiguió demostrar de forma concluyente que la tan buscada
fórmula no existe. La fórmula de la ecuación de quinto grado fue el parto de los montes matemático.
M U J E R
F A T A L
La demostración de Abel era complicada y además no llegaba del todo al fondo del problema. Tal honor
correspondió finalmente a un joven francés, Èvariste Galois, nacido en 1811 y fallecido en 1832, que
pasò buena parte de su corta vida metiéndose en problemas. Galois desarrolló una teoría general de las
permutaciones de las soluciones de ecuaciones, centrándose en aquellas permutaciones que conservan
todas las relaciones algebraicas que se dan entre las soluciones. Detectó una notable propiedad de estos
sistemas de permutaciones: si dos de ellas son a su vez permutadas, el resultado es siempre otra
permutación del mismo sistema. A cada sistema de este tipo le dio el nombre de grupo de permutaciones
como culminación de su trabajo demostró que aquellas ecuaciones que pueden resolverse mediante una
fórmula han de tener grupos de un tipo especial y que la ecuación de quinto grado tiene el tipo de grupo
que no resulta adecuado. Es así de sencillo.
Galois fue un personaje pintoresco y al final trágico. Su labor no fue valorada mientras vivió y los
matemáticos que entonces llevaban la voz cantante le ignoraron. Falleció en un duelo inútil- disparo de
pistola a 25 pasos- por un asunto relacionado con una mujer y se sospecha que dicho duelo pudo haber
sido planeado por sus enemigos políticos. Galois dejò escrito que aquella joven, conocida hasta hace poco
como la misteriosa Stèphanie D., era una << coqueta infame >>. Sin embargo, una investigación
detectivesca sobre los manuscritos de Galois llevada a cabo por el historiador Carlos Infantozzi ha
revelado que la mujer fatal era Stèphanie- Felicie Poterin du Motel, la muy respetable hija de un médico
que era vecino de Galois. Parece probable que las atenciones de Galois no fueran bien recibidas y que
(como suele ser típico ) se dejara llevar por sus emociones y reaccionara de mala manera.
Fuera como fuese, Galois había extraído la idea clave de grupo a partir de las complejidades algebraicas
de la ecuación de quinto grado y conocía de sobra la importancia de esto. Al resto de los matemáticos les
llevo un par de décadas llegar a la misma conclusión y les podría haber llevado todavía más si no hubiera
sido por los esfuerzos de Joseph Liouville, que fue el primero en darse cuenta del tesoro que encerraban
los escritos de Galois.
Puede parecer que media un abismo entre las permutaciones de las soluciones de ecuaciones y las
transformaciones de las figuras geométricas. Sin embargo, realmente tiene sentido considerar los grupos
de permutaciones de Galois como grupos de simetrías de las ecuaciones. En primer lugar, una
permutación es en sí una transformación: no del espacio, pero sí de un conjunto de soluciones. Es un
reordenamiento, una manera de << tomarlas y volver a colocarlas >>. Ahora bien, para que sea una
simetría de un objeto geométrico, una transformación debe dejar la forma de dicho objeto invariable.
Entonces, ¿ qué sería lo análogo de una figura en la teoría de las ecuaciones? Bueno, la forma de un
objeto está determinada por las distancias entre los puntos que lo forman, y una simetría es un
movimiento rígido, que mantiene esas distancias. Es más, la distancia es la relación geométrica básica
entre puntos. De manera análoga, las simetrías de una ecuación han de mantener las relaciones
algebraicas básicas entre sus soluciones; y así es exactamente como definió Galois sus grupos. Sin
embargo, no es probable que esta analogía fuera evidente para Galois, ya que se estaba todavía lejos de
conocer los grupos de simetrías en geometría. El planteamiento estaba ciertamente claro en la época de
Hermann Weyl, quien- utilizando una jerga de palabras que no hemos mencionado, pero que él explica
inmediatamente- escribió:
Siempre que uno se encuentra con una entidad dotada de estructura... se ha de intentar
determinar su de grupo auto morfismos, el grupo de aquellas...transformaciones que dejan intactas
todas las relaciones estructurales.
La cursiva es de Weyl: está claro que consideraba importante este consejo.
L A
G E O M E T R Ì A
E S
S I M E T R Ì A
Hasta ahora hemos estado considerando la simetría como un tipo de accidente de la geometría. Siguiendo lo
que en ellos es una costumbre típica, los matemáticos se pusieron a darle la vuelta de campana a todo y
empezaron a considerar que la geometría, o más exactamente las geometrías, eran una consecuencia de la
simetría. ¿ Hemos dicho geometrías? ¿ No hay bastante con una? Por su puesto que no. En los tiempos de
Euclides existía solamente una geometría- la euclidiana, naturalmente-, pero para la década de 1870 la
geometría había proliferado convirtiéndose en un tropel ingobernable de geometrías: geometría euclidiana y
no euclidiana, geometría proyectiva, geometría afín, geometría conformacional, geometría inversa, geometría
diferencial y los primeros brotes de la topología. Un creyente del Dios Geómetra hubiera tenido que volverse
panteísta.
Felix Klein, un matemático alemán de la Universidad de Gotinga, fue el que convirtió las simetrías en algo
fundamental y las geometrías en algo subsidiario. Siguiendo la tradición enciclopédica alemana, Klein quiso
poner orden en el caos de la geometría. Sin embargo, en vez de limitarse a catalogar todas las posibilidades,
introdujo un nuevo elemento en la estructura matemática. En 1872, en la Universidad de Erlangen, dio una
clase magistral que ha pasado a la historia con el nombre de Programa de Erlangen. La esencia del programa
de Klein consistía en afirmar que la geometría es teoría de grupos. Los grupos se forman a partir de las
transformaciones que dejan invariables las nociones básicas de geometría, pero esta relación se puede invertir,
de forma que, según las palabras de Klein, << las propiedades geométricas se caracterizan por su
invariabilidad al ser sometidas a un grupo de transformaciones>>. Cada tipo de geometría posee su propio
grupo; sin embargo, dentro del marco de ese grupo, cada geometría se desarrolla siguiendo líneas análogas.
La teoría de grupos proporciona ese terreno común que constituye la conexión entre las distintas geometrías.
Examinemos cuatro ejemplos.
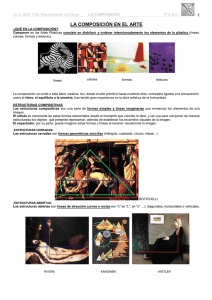
Por ejemplo, en la geometría euclidiana las nociones básicas son las distancias y los ángulos. Las
transformaciones que conservan las distancias y los ángulos son precisamente los movimientos rígidos. En
efecto, la idea de Klein consiste en invertir este argumento: tomar el grupo de movimientos rígidos como
objeto básico y, a partir de ahí, deducir la geometría. Así, un concepto geométrico que sea legítimo en la
geometría euclidiana es algo que permanece invariable después de aplicarle un movimiento rígido. Un
concepto de este tipo es, por ejemplo, el << triángulo rectángulo >>; sin embargo, el concepto
<<horizontal>> no lo es, porque las líneas rectas se pueden inclinar al aplicarles movimientos rígidos. La
obsesión de Euclides por los triángulos semejantes como método de demostración- cuya oscuridad ha
frustrado y exasperado a generaciones enteras de escolares- se vuelve así transparente, ya que dos triángulos
son semejantes cuando uno de ellos puede ser colocado sobre la parte superior del otro mediante un
movimiento rígido. Euclides los utilizaba de manera que desempeñaban el mismo papel que las
transformaciones que tanto gustaban a Klein.
La geometría no euclidiana se basa también en las distancias y los ángulos, pero aquí éstos no se comportan
exactamente igual que sus colegas euclidianos. Las geometrías no euclidianas se basan en la no obediencia al
axioma de las paralelas de Euclides, que dice lo siguiente: dado un punto, por él pasa una única recta paralela
a una recta dada. En una de las variedades de geometría no euclidiana, la geometría elíptica, las paralelas no
existen en absoluto; en otra de estas variedades, la geometría hiperbólica, las paralelas existen en haces
infinitos. Cada tipo de geometría no euclidiana tiene su propio grupo de movimientos rígidos: movimientos
que conservan la distancia, según la noción peculiar de distancia que exista en esa geometría. Para dar una
idea de cómo son estas extrañas ( pero extremadamente importantes ) geometrías, la figura 2.8 muestra una
litografía de Escher basada en la geometría hiperbólica. Aunque los Ángeles y los demonios parecen
encogerse a medida que se acercan al borde del círculo, esto es cierto sólo según la típica noción euclidiana de
distancia.
En la noción de distancia vigente en la geometría hiperbólica, todos los Ángeles y todos los demonios son
idénticos: forman una especie de embaldosado del plano hiperbólico. Es evidente que este plano tiene mucha
simetría.
En la geometría proyectiva, las únicas transformaciones permitidas son las proyecciones: algo muy parecido a
la manera en que se proyecta una película sobre la pantalla. Las proyecciones no conservan las distancias
( Harrison Ford es mucho mayor en la pantalla que en la cinta de película que hay en el proyector y ésta es a
su vez menor que su tamaño real cuando se filmó la película ), por lo que las distancias no son un concepto
válido en la geometría proyectiva. Sin embargo, la propiedad de << tener forma elíptica >> sí que lo es,
porque cualquier proyección de una elipse es otra elipse.
La topología permite una gama mucho más amplia de transformaciones: las que son continuas, que pueden
curvar, estirar o comprimir el espacio pero no rasgarlo o cortarlo. << tener forma elíptica >> no es un
concepto topológico, ya que una elipse puede distorsionarse de manera continua hasta dar lugar a un cuadro o
un trianguló. <<Estar anudado>> es un concepto típico en topología: no se puede deshacer un nudo de un
bucle cerrado ni estirándolo, ni curvándolo.
Como se ve, los distintos grupos dan distintos estilos, pero cada uno de estos grupos da lugar a un estilo de
análisis geométrico consistente en sí mismo. Además de poner orden en el caos, la unificación realizada por
Klein pone de manifiesto conexiones inesperadas entre las distintas geometrías. Resulta que en algunas
geometrías existen grupos que coinciden con los de otras, aunque a veces quizás algo disfrazados. Este hecho
significa que las dos geometrías son en realidad equivalentes entre sí. De una manera similar, las geometrías
que se basan en grupos más amplios son más generales que aquellas que se basan en grupos más pequeños; y
cualquier teorema que sea válido en aquella geometría que posee el grupo mayor es válido automáticamente
en la que posee uno menor. Por ejemplo, los teoremas de la geometría proyectiva son teoremas
automáticamente válidos en la geometría euclidiana. Por ejemplo, los teoremas de la geometría euclidiana.
Por todo esto, existe una especie de jerarquía entre las geometrías, por lo que está claro que no constituyen un
revoltijo desordenado.
El punto de vista de Klein ejerció una gran influencia, no sòlo porque unificaba la amplia gama de geometrías,
sino también porque los matemáticos de su época iban descubriendo que sus problemas se centraban cada vez
más en torno a las transformaciones y los grupos. Henri Poincarè decía que << la teoría de grupos es, en
cierto modo, como si tomáramos las matemáticas en su conjunto y las despojáramos de su materia para
dejarlas reducidas a “ forma pura”>>. Aun siendo esto un poco exagerado, tenía sin embargo su parte de
verdad: los grupos eran ciertamente el armazón de la mayor parte de las matemáticas que eran objeto del
interés de Poincarè, y hay que tener en cuenta que éste fue en su tiempo uno de los matemáticos que tenían
mayor amplitud de miras.
Después de que Klein utilizara la teoría de grupos para poner orden en el ingobernable tropel de las
geometrías, dicha teoría empezó a tener un desarrollo espectacular. Arthur Cayley aportó el establecimiento
de un marco más abstracto para la teoría de grupos, en el que se ponía menos énfasis en el papel que
desempeñaban las transformaciones, y la forma en que éstas podían combinarse llegó a ser de suma
importancia. Surgió una noción de << grupo >> mucho más general, como un sistema que podía no estar
formado en absoluto por transformaciones. No profundizaremos en esto, porque los grupos que nos interesan
para el estudio de la ruptura de la simetría se forman siempre a partir de transformaciones. Tampoco
continuaremos desarrollando aquí la historia de la teoría de grupos, ya que, aunque ésta es fascinante, ello nos
distanciaría de nuestros principales objetivos. En vez de eso, presentaremos los grupos que son más
importantes en relación con lo que expondremos posteriormente en este libro: los grupos de movimientos
regidos en los espacios bidimensional y tridimensional.
TODO UN DESFILE DE GRUPOS
Echemos un vistazo a algunos de los grupos de simetrías básicas, para hacernos una idea de lo que se trata. No
intentamos confeccionar un catálogo exhaustivo, dado que, por poner un caso, en el espacio tridimensional
hay 230 diferentes grupos de simetría en los cristales, esto parece lo más sensato. Entre todos los grupos, los
,as sencillos son los llamados grupos cíclicos. Un buen ejemplo de figura que posee un grupo de simetrías
cíclico es el símbolo de la isla de Man, con una especie de piernas que corren ( figura 2.9 ). Está formado por
tres piernas separadas en círculo como los radios de una rueda. Las simetrías de esta figura son las rotaciones
y existen tres que son posibles: la rotación mediante un tercio de vuelta completa, otra de dos tercios y la de
ángulo cero ( la simetría trivial). El << álgebra>> de estas rotaciones es evidente: si se combinan dos
rotaciones resulta la suma de ellas, pero a continuación hay que quitar el número entero de vueltas que se
2 2 4
+ = , sin embargo, dado que el
3 3 3
3
1
resultado es mayor que una vuelta completa, restaremos una vuelta, o sea , con lo que queda .
3
3
hayan acumulado. Por ejemplo, en unidades de vuelta completa,
Una figura similar, pero que tuviera n piernas a distancias iguales unas de otras, tendría un grupo de simetrías
consistente en rotaciones mediante distintos ángulos, todos ellos múltiplos de
1
de vuelta completa. Existen
n
exactamente n rotaciones de este tipo, las cuales constituyen el grupo cíclico de orden n que los matemáticos
expresan mediante el símbolo Z n . A diferencia del grupo de simetrías de la estrella de mar, los grupos
cíclicos no contienen ninguna reflexión. Imaginemos una estrella de mar que tuviera pies en los extremos de
sus brazos, como los tiene el símbolo de las piernas que corren: su grupo de simetrías sería entonces cíclico de
orden 5, porque la asimetría de los pies excluye la posibilidad de realizar reflexiones.
El grupo de simetrías de la estrella de mar es un ejemplo de grupo diedro. El modo más sencillo de
imaginarse un grupo diedro es pensar en el grupo de simetrías de un polígono regular de n lados. Además de
las n rotaciones del grupo cíclico, existen n reflexiones respecto a los ejes de simetría del polígono ( figura
2.10). Por lo tanto, el grupo contiene en total 2n transformaciones simétricas: la mitad de ellas rotaciones y la
otra mitad reflexiones. La notación empleada para este grupo es D N .
Las simetrías de rotación dejan al polígono presentando la misma cara; el efecto de las reflexiones es un
vuelco. ¿ Qué sucedería si combináramos dos reflexiones? El polígono sufre el vuelco dos veces, por lo que
acaba estando como al principio. Sin embargo, las simetrías que lo dejan presentando la misma cara han de
ser rotaciones. De esta forma, sin efectuar ningún tipo de cálculo minucioso, vemos que en D n la
combinación de dos reflexiones es siempre una rotación. Gran parte de la fuerza que tiene la teoría de grupos
se deriva de argumentos tan sencillos como este. Qué rotación se realiza es algo que depende exactamente del
ángulo que haya entre los dos ejes que hacen de espejo en las reflexiones y del orden en que dichas
reflexiones se efectúen, Finalmente las cosas no se pueden aclarar sin pensar un poco.
Se dice de los grupos Z n y D n que son finitos, porque contienen un número finito de transformaciones.
Durante el Renacimiento italiano era habitual construir edificios con simetría poligonal, y Leonardo da Vinci
estudió todas las posibles simetrías de un edificio principal con capillas adyacentes, demostrando realmente
un teorema de la teoría de grupos: los únicos grupos de transformaciones del plano finitos son Z n y D n . Este
fue uno de los primeros ejemplos de un tema que se mencionará una y otra vez a lo largo de este libro: la
capacidad de los argumentos matemáticos para determinar todas las clases posibles de grupos de simetrías de
un tipo concreto. Un ejemplo todavía más antiguo es la clasificación de los cinco poliedros regulares, que
Platón ya conocía, al que volveremos en el capítulo 4.
Se puede considerar el círculo como un polígono regular que tiene un número infinito de lados. Su grupo de
simetrías correspondiente está formado por todas las rotaciones realizadas en torno a un centro determinado,
junto con todas las reflexiones respecto a los ejes que pasen por dicho centro. De nuevo vuelve a suceder que
combinando dos reflexiones se obtiene una rotación. El símbolo para designar al grupo es 0(2), el grupo
ortogonal en dos dimensiones. Tomando sólo las rotaciones, resulta que éstas forman un grupo menor S0(2),
el grupo ortogonal especial en dos dimensiones.
Vayamos a las tres dimensiones. Aquí nos encontramos con varios nuevos grupos. El grupo de simetrías de
una esfera, por ejemplo, está formado por todas las rotaciones en torno a su centro y, además, todas las
reflexiones respecto a los planos que pasen por dicho centro. Todas estas simetrías juntas constituyen 0(3), el
grupo ortogonal en tres dimensiones. Las rotaciones por sí solas forman un grupo menor S0(3), el grupo
ortogonal especial en tres dimensiones. .
Los cinco sólidos regulares tienen unos grupos de simetrías especialmente interesantes. Comencemos por el
cubo, porque es la figura que resulta más familiar. Un cubo posee ocho vértices y en cada uno de ellos
confluyen tres aristas. Ahora bien, podemos hacer girar cualquier vértice dado hasta colocarlo en la posición
que deseemos; y, una vez hacho esto, podemos girar el cubo dejando dicho vértice fijo, para recorrer las
posiciones de las tres aristas que confluyen en este vértice.Por lo tanto, el cubo tiene 8 X 3 = 24 simetrías de
rotación. Aún más, posee al menos una simetría de reflexión, que combinada con las 24 rotaciones nos dará
otras 24 simetrías de reflexión, con lo que el total asciende a la nada despreciable cifra de 48 simetrías.
Realizando razonamientos similares, podemos establecer una tabla de simetrías como la siguiente:
- tetraedro, 24 simetrías;
- cubo, 48 simetrías;
- octaedro, 48 simetrías;
- dodecaedro, 120 simetrías;
-icosaedro, 120 simetrías.
El cubo y el octaedro poseen ambos el mismo número de simetrías ( 48), y lo mismo les sucede al dodecaedro
y al icosaedro ( 120). La razón por la que ocurre esto es un fenómeno conocido como dualidad: Si situamos
un punto en el centro de cada cara del cubo obtendremos seis puntos, y estos puntos, forman los vértices de
un octaedro regular, que es la figura dual del cubo. Toda simetría del cubo es también una simetría del
octaedro dual; toda simetría del octaedro dual es asimismo una simetría del cubo. Por lo tanto, ambos sólidos
tienen el grupo de simetrías. De la misma manera, si situamos un punto en el centro de cada una de las caras
de un dodecaedro, tendremos los vértices de un icosaedro dual y otra vez sucede que ambos sólidos tienen el
mismo grupo de simetrías ( figura 2.11 ).Y ¿ qué pasa con el tetraedro? Si colocamos puntos en los centros de
sus caras obtenemos otro tetraedro. Resulta que este sólido es dual respecto a sí mismo y no hemos sacado
nada nuevo. En consecuencia, en vez de cinco grupos diferentes, existen solamente tres, llamados
normalmente grupos tetraédrico, octaédrico e icosaedrito. Felix Klein realizó un estudio sistemático de las
aplicaciones de esto a las funciones de variable compleja y descubrió conexiones entre el grupo icosaedrico y
la teoría de Galois sobre la ecuación de quinto grado. Estamos chapoteando muy cerca de aguas profundas.
Hemos mencionado algunos de los principales grupos de simetrías de las figuras tridimensionales. Existen
otros, que son un poco más difíciles de explicar, pero no es nuestra intención ofrecer aquí una lista completa.
En lugar de eso, echemos un rápido vistazo a las analogías bidimensionales de las estructuras de los cristales.
Podemos ver uno de estos diseños en las paredes de la mayoría de los cuartos de baño; unos azulejos
cuadrados. Un plano infinito cubierto de azulejos cuadrados tiene dos tipos de simetría bastante diferentes. En
primer lugar, se puede elegir un azulejo en concreto y aplicar unas simetrías que lo dejen en el mismo lugar.
Se consiguen así ocho simetrías para cada azulejo, que constituyen un grupo diedro D 4 , tal como sucede con
las simetrías de un cuadrado. Sin embargo, también existen simetrías que desplazan un azulejo dado a la
posición de otro azulejo. Si la orientación no varia, se trata de traslaciones mediante un número entero de
azulejos en dirección horizontal y otro número entero de azulejos en dirección vertical. Con el fin de cambiar
al mismo tiempo la orientación, se puede aplicar primero la traslación para realizar el desplazamiento a lo
largo de los azulejos y luego girar el azulejo final. Por consiguiente, toda simetría del conjunto completo de
azulejos es una combinación de estos dos tipos de simetría. Las traslaciones reciben el nombre de simetrías
reticulares y cada uno de los D 4 es un grupo puntual. Tendremos más que decir sobre esta clase de grupo
cuando hablemos sobre cristales en el capituló 4 y sobre el caos simétrico en el capítulo 9.
LA RUPTURA DE LA SIMETRÍA SEGÚN EL ENFOQUE DE UN ESTUDIOSO DE LA
TEORÍA DE GRUPOS
Cuando Weyl empezó a referirse a los grupos en su libro, lo hizo en primer lugar desde un punto de vista
abstracto y luego planteó la pregunta: << ¿Qué tiene que ver todo esto con la simetría?>>. Su respuesta
consistió en decir que la teoría de grupos << aporta el lenguaje matemático adecuado para definirla >>. Si esto
es cierto, la teoría de grupos habría de aportar también el lenguaje matemático adecuado para definir la
ruptura de la simetría. Veamos de qué manera. Pensemos en la pelota de ping-pong deformada con
protuberancia y depresiones. ¿ Qué sucede al grupo de simetrías de la pelota cuando ésta se deforma? Antes
de sufrir la deformación, la pelota es una esfera perfecta grupo de simetrías está constituido por todos los
movimientos rígidos que mantienen su centro fijo. Estos movimientos son las rotaciones, mediante cualquier
ángulo, en torno a un eje que pase por su centro, así como las reflexiones respecto a cualquier plano que pase
por dicho centro. Acabamos de ver que la totalidad de tales transformaciones constituye un grupo conocido
como 0(3), es decir, el grupo ortogonal en tres dimensiones.
Después de sufrir la deformación por presión, existe un eje preferente y la pelota de ping-pong deformada
permanece invariable al serle aplicadas rotaciones mediante cualquier ángulo en torno a dicho eje o
reflexiones respecto a planos que contengan a este eje. Estas reflexiones constituyen otro grupo. Si pensamos
cuál es el efecto de estas simetrías en el plano perpendicular al eje, veremos que en esencia se trata
precisamente de 0(2), es decir, el grupo ortogonal en dos dimensiones.
¿ Qué relación existe entre estos dos grupos? Insistiremos en que la simetría esférica 0(3) se ha << roto>>
para dar lugar a la simetría circular 0(2). ¿ Qué queremos decir con esto? Significa que ya no se pueden tomar
en consideración algunas de las simetrías de la esfera: no siguen siendo simetrías en la esfera que tiene
protuberancias y depresiones. Por otra parte, todas las simetrías << circulares>> de la esfera deformada son
también simetrías válidas de la esfera original no deformada. Resumiendo, 0(2) contiene menos simetrías que
0(3), aunque no en sentido numérico, ya que ambos grupos contienen una cantidad infinita de
transformaciones, sino en el sentido de que 0(2) es una parte de 0(3).
Si un grupo forma parte de otro grupo, entonces al menor de éstos le llamamos subgrupo. Cuando la simetría
se rompe, la simetría del estado resultante en el sistema es un subgrupo del grupo de simetrías de la totalidad
del sistema. Por consiguiente, la ruptura de la simetría es una variación en el grupo de simetrías, que pasa de
ser mayor a ser un grupo menor, del todo a una parte.
Como ejemplo de esto, en la figura 2.12 se muestra un famoso experimento físico, conocido como la placa de
Chladni. Concretamente estos dibujos se publicaron en 1834: están tomados del libro of the conexión of the
Physical Sciences de Mary Somerville, una de las más grandes mujeres matemáticas del siglo XIX y al
mismo tiempo una competente divulgadora científica. El aparato consiste en una placa cuadrada, sujeta por el
centro, y sobre ella se esparce arena. Se hace que la placa vibre utilizando un arco de violín y entonces la
arena se amontona en torno a las líneas nodales, donde la placa se encuentra estacionaria. Este aparato tiene
simetría cuadrada y también la tienen algunos de los dibujos, a saber, los números 4,5,7,9,10,11,13 y 14
contando desde la parte de arriba y a lo largo de las filas. En el resto de los dibujos la simetría cuadrada se ha
roto: éstos poseen menos transformaciones simétricas. En la figura se pueden ver varios subgrupos diferentes
de D 4 y el lector tendrá ocasión de adquirir cierta experiencia practica si se pone a averiguar qué simetrías
posee cada dibujo. Llamemos a las cuatro rotaciones 0,90,180 y 270 y a las cuatro reflexiones H,V,D y U ( eje
horizontal, vertical, diagonal descendente de izquierda a derecha, diagonal descendente de derecha a
izquierda). Aplíquense cada una de las ocho transformaciones a cada dibujo y tómese nota de aquellas que lo
dejan invariable. Por ejemplo, el dibujo 1 permanece invariable al aplicársele 0,180,D Y U; el dibujo 2
mediante 0,180, H y V; y el dibujo 15 mediante 0 Y U.
La teoría general de la ruptura de la simetría parte de este punto de vista y aborda preguntas tales como
<< ¿ Qué subgrupos pueden surgir? >> y << ¿ Cuándo aparece un subgrupo determinado?>>. Las respuestas
pueden ser muy precisas: por ejemplo, James Montaldi utilizó este planteamiento para demostrar que un
objeto con simetría tetraédrica podía vibrar de 27,39 o ( rara vez) infinitas maneras diferentes ( y,
curiosamente, sólo estos números), dependiendo del signo de una cantidad determinada. El resultado es válido
igualmente para un tetraedro de goma, cuatro pelotas colocadas sobre muelles o una molécula de metano: el
sistema físico no influye en los números, sólo importa la cuestión de la simetría. No vamos a aburrir al lector
con los aspectos técnicos de las explicaciones de estas cuestiones, pero si hay que tener en cuenta que éstas
constituyen el pilar de la teoría de ruptura de la simetría, por lo que ya iremos viendo algunas de sus
consecuencias a medida que avancemos en el tema.