memorias
Anuncio

PROBLEMAS INVERSOS Y TECNICAS DE REGULARIZACION
DORIS HINESTROZA
SEPTIEMBRE 2003
En esta presentación haremos una introducción a los problemas inversos mal puestos y daremos algunos ejemplos
de interés de tipo integral y algunos algoritmos de regularización.
1. PROBLEMAS INVERSOS
Muchos sistemas físicos pueden ser descritos usando el modelo
Af = g .
causa
Modelo
f →
Ef ecto
A
f →
→g
Consideraremos que el operador
A : X →Y
donde X ,Y se consideran espacios de Hilbert, es un operador lineal continuo .
A partir del modelo presentado surgen de aquí los siguientes problemas:
PROBLEMA 1
Problema Directo: Dado f ∈ X y A hallar g ∈ Y .
PROBLEM 2
Problema de Reconstrucción: Dado A y
g ∈ Y , Hallar f ∈ X .
PROBLEM 3
Problema de Identificación: Dado f ∈ X y g ∈ Y identificar A.
1
PROBLEMA 2
PROBLEMAS INVERSOS
PROBLEMA 3
En el caso del problema 2 queremos calcular
f = A−1 g . Pero este problema es
complicado por dos factores importantes. Uno de ellos es que operador A opera en
espacios de dimensión infinita y el otro hecho es que el operador viene representado
como un operador integral, el cual desafortunadamente es un operador compacto. Estos
dos factores asegurar que el operador inverso A−1 no es continuo. Así, pequeños
errores en g pueden producir errores grandes en la reconstrucción de f .
Como ejemplo de estos modelos podemos considerar el problema de identificación de
parámetros.
Consideremos una ecuación diferencial dependiente de un parámetro.
L( c )u = f
donde u es la solución, f representa una fuerza externa y L es un operador integral
que depende del parámetro c , esto es
•
•
Operador del tipo L( c )u = ∆u + c 2u (Operador de Helmholtz).
Operador del tipo L( c )u = div( c∇u ) .
Problema directo: Dados c y f , y condiciones de frontera o iniciales adecuadas,
calcular u .
Problema inverso: Dada la forma de L y alguna información de u (por ejemplo, datos
en la frontera), determinar c. Si c depende de x, este problema inverso se llama un
problema de identificación.
1.1 PROBLEMAS BIEN PUESTOS Y PROBLEMAS MAL PUESTOS
El Problema y = Ax es un problema bien puesto (well - posed) si las siguientes
condiciones se cumplen
1. El problema tiene solución (Existencia).
2. La solución del problema es única (Unicidad).
3. El problema depende continuamente de los datos (Estabilidad).
Podemos observar que un problema bien puesto es equivalente a decir que el operador
A es biyectivo y que el operador inverso A−1 : Y → X es continuo.
Un problema es mal puesto (ill-posed) si una de las condiciones (1)-(3) no se
satisfacen.
En general la mayoría de los problemas inversos son mal puestos ill-posed).
2
1.2 OPERADORES DE TIPO INTEGRAL
•
Ecuación de Fredholm Integral de primera clase
b
g( s ) = ∫ k( s,t ) f ( t )dt
a
•
Ecuación de tipo Volterra Integral de primera clase
s
g( s ) = ∫ k( s,t ) f ( t )dt
a
•
Ecuación de tipo convolución
b
g( s ) = K * f = ∫ k( s − t ) f ( t )dt
a
1.3 EJEMPLOS
Ejemplo 1. La Diferenciación como un Problema Inverso
Do f ( x ) =
f ( x + h)− f ( x − h )
,
2h
Do f − f ′
∞
≤
f ∈ C 3 [a,b ]
h2
M = O(h 2 ).
3
f ε ( x ) = f ( x ) + N( x ), a ≤ x ≤ b,
N
∞
≤ε
Si tomamos
N( x ) = ε sin( nx ), n ≥ 2 , N
∞
≤ε
tenemos que
ε
fε′ x ) = f ′( x ) + cos( nx ) ,
n
Do f ε ( x) = Do f ( x) +
f ε′ − f ′
N ( x + h − N ( x − h)
,
2h
∞
≤ O (h 2 ) +
ε
.
h
Ejemplo 2.
0.2161 0.1441
0.1440
Consideremos la matriz A =
y b=
,
1.2969 0.8648
0.8642
3
=
ε
n
Do f − Do f ε
Tenemos un error total dado por
f ′ − Do f ε′
∞
∞
≤
ε
.
h
Si resolvemos el sistema A x = b , su solución es dada por x=2, y=2.
0.1410 + 10−8
Si consideramos una perturbación de b , bε =
.
0.8642 + 10−8
10−8
b − bε =
10−8
0.9911
La solución del sistema Axε = bε es xε =
.
−0.4870
−86484323 14407118
Más aún si B =
,
129696483 −21605678
0
1
AB =
.
−0.0003 0.9998
Podríamos preguntarnos: ¿ B es una buena aproximación para A −1 ?
Si
z = Bb
el
residuo
es
dado
por
0
Az − b =
.
0.0000216
Observemos
que
−3111.1364
z=
. ¿Como así?
4666.6244
Observemos que
−4670.861 −3115.2979
BA =
7006.1781 4672.8659
−86480000 14410000
A−1 =
12969000 −21610000
y
Conclusión: A una matriz mal condicionada.
Ejemplo 3
Consideremos la ecuación
Ax = b, b ∈
m
, x∈
{
Z = x* : Ax* −b = inf
n
, A∈
mn
{ Ax − b : x ∈ }}
n
Z : Conjunto de las soluciones de mínimos cuadrados.
Se puede demostrar fácilmente que
Ax* −b = inf
{ Ax − b : x ∈ } ⇔ A
n
T
Ax* = AT b
La solución generalizada x̂ se define como
x = inf { z : z ∈ Z } .
1 1
2
b = Ax = b , el sistema no tiene solución. Las
0 0
1
En el caso que A =
soluciones de mínimos cuadrados está dada por
4
Z = {( x, y ) : x + y = 2}
1
1
La solución generalizada es dada por x = . Observemos que si
1 1
Aε =
0 ε
1
2− ε
Aε zε = b ⇒ zε =
1
ε
Como podemos observar zε no converge a x̂ cuando ε → 0 .
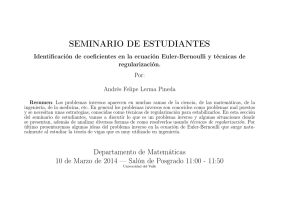
Ejemplo 4 (Problemas relacionados con el problema inverso del Calor)
Problema 1.
g(x)
t=1
ut=uxx
u(0,t)=0
u(1,t)=0
0
1
u(x,0)=f(x)?
1
g( x ) = ∫ k( x,u ) f ( u )du
k( x,u ) =
0
5
2 ∞ − n2
∑ e sen nx sen nu
π n=1
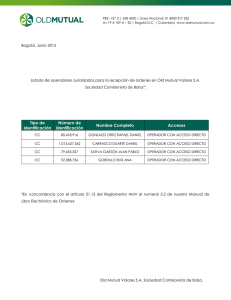
Problema 2.
? u(0,t)
ut=uxx
u(1,t)
ux(1,t
u(x,0)=f(x)
?
1
0
2
t
e− x / 4( t −τ )
f ( τ )d τ
∫
2 π 0 ( t − τ )3 / 2
x
u( x,t ) =
t
k( t, τ ) =
g( t ) = u( 1,t ) = ∫ k( t , τ ) f ( τ )d τ
0
e −1 / 4( t −τ )
2 π ( t − τ )3 / 2
1
Ejemplo 5.
Consideremos un operador lineal comp acto A definido sobre el espacio de Hilbert
x = ( x1 ,x2 ,
Definimos el operador A :
2
→
2.
∞
) ∈ l2 ⇔ ∑ xi2 < ∞
,xn ,
i =1
2
x x
Ax = x1 , 2 , 3 ,
2 3
,
xn
, .
n
Formalmente la inversa de A es dada por
A−1 y = ( y1 , 2 y2 ,
,nyn ,
)
Así tenemos unicidad (y existencia para ciertos y ).
Pero no tenemos estabilidad.
Tomemos por ejemplo
yn = ( 0,
,0,1 / n , 0,
).
Entonces y n → 0 , pero
A−1yn = n → ∞ .
También podemos observar que el sistema Ax = y no tiene solución para todo y ∈ Y ,
por ejemplo si tomamos y = ( 1,1 / 2,1 / 3,
) = A( 1,1,1,
6
) , pero ( 1,1,1,
)∉
2
Ejemplo 7. PROBLEMA DE RESTAURACIÓN
Af ( x) = K ( x ) * f ( x) = g ( x)
g ( x), K ( x) son dados
K ( x) =
1
exp(−π 2 x 2 / µ 2 )
µ
K ( w) = exp(−π 2 µ 2 w 2 )
K ( w) ≠ 0 para todo w ∈ R .
f (w) =
(
)
g ( w)
= g ( w) 1 + πµ 2 w 2 + (πµ 2 w 2 ) 2 / 2 + ....
K (w)
f ( x) = g ( x ) − ( µ 2 / 4π ) g ′′( x) + ( µ 4 / 32π 2 ) g ′′′′( x ) + ....
µ= π
f ( x) = g ( x) − (1 / 4) g ′′( x) + (1 / 32) g ′′′′( x ) + ....
Esta formula es conocida como formula de Eddington.
2. REGULARIZACIÓN DE REGULARIZACION
2.1 Método de Regularización de Tikhonov
La idea básica de la regularización de Tikhonov es relacionada con la minimización del
funcional cuadrático
Φ µ ( f , g ) = Af − g
2
+µ f
Si µ = 0 , tenemos un problema de mínimos cuadrados.
Sea f µ una solución que cumple que
Φ µ ( fµ , g) ≤ Φ µ ( f , g)
( A* A + µI ) f µ = A* g
7
2
f µ = ( A* A + µI ) −1 A* g = Rµ g
R µ = ( A * A + µ I ) −1 A *
< A* Af + µf , f >=< Af , Af > + µ < f , f >= Af
ii.
2
+µ f
2
≥µ f
2
La solución es única.
iii.
( A* A + µI ) −1 ≤
1
µ
Rµ es llamada una regularización lineal para el problema inverso mal puesto Af = g .
µ es llamado parámetro de regularización.
fµ
la solución regularizada.
2.2 Método Iterativo de Tikhonov
El sistema
( A* A + µI ) f µ = A* g
es equivalente a
Af µ − µ hµ = g
A* h + µ f = 0
µ
µ
Afµ −
µ hµ = g
µ β A hµ + µ β f µ − f µ + f µ = 0
*
Esto nos permite definir el método iterativo
Af µn − u hµn = g
µ β n A*hµ + µβ n f µn − f µn + f µn+1 = 0 .
Entonces obtenemos
u hµn = Af µn − g
f µn+1 = f µn − β n ( µf µn − µ A*hµ ) .
Para n=0,1,2,… y
f µ0 arbitrario.
8
Teorema 2.6
(Consistencia)
f − f µ ≤ Cµ
Para alguna constante C > 0 , independientemente de µ .
(Estabilidad )
f µ − f µε ≤
ε
µ
(Convergencia)
f − f µε ≤ Cµ +
ε
µ
µ = Ο(ε ) La convergencia será de order Ο( ε ) .
2.3 Método de Mollificación
Para cada función continua f ∈ C[ 0 ,1 ] definimos el operador mollificación como
J δ f ( x) = ( ρ δ * f )( x)
ρδ ( x) =
1
δ π
e
−x
2
δ2
Núcleo Gaussiano de radio δ .
J δ f suaviza las puntas de f y elimina aquellas oscilaciones en escalas ≤ δ .
El núcleo Gaussiano tiene la propiedad que es el tiene la más pequeña dispersión de su
transformada de Fourier entre todos los núcleos de mollificación.
Claramente, ρ δ ∈ C ∞ y decrece rápidamente fuera de un intervalo de radio δ de su
centro (≈ 3δ ) , es positivo y tiene integral 1.
La transformada de Fourier J δ f es dado por
J δ f ( w) = ρδ ( w) ⋅ f (w) = e − w δ
2 2
/4
⋅ f ( w).
C o (I ) el conjunto de funciones continuas sobre I = [0,1] con f ∞ = Max f (x ) .
x∈I
d
J δ f ( x ) = ( ρ δ )′ * f ( x ) = ρ δ * f ' ( x )
dx
Sea K ⊂ I un compacto tal que d ( K , ∂I ) ≥ 3δ .
9
Teorema 2.7 : Si f ε ∈ C o (I ) y f − f ε
1.
Jδ fε − f
∞, K
∞
≤ ε , entonces
≤ 4M 1δ + ε
2. (Consistencia) If
3. (Estabilidad) f ′′
f ′′ ∞;I ≤ M 2 , entonces ( J δ f )′ − f ' ∞ ,K ≤ 3M 2δ .
∞;I
4. (Convergencia). f ′′
≤ M 2 , entonces ( J δ f )′ − ( J δ f ε )′ ∞ ,K ≤
∞;I
≤ M 2 , entonces
2ε
.
πδ
f ′ − ( J δ f ε )′ ∞ ,K ≤ 3M 2δ +
2ε
.
πδ
Bibliografía
1. J. Baumeister, Stable Solutions of Inverse Problems, Vieweg,Braunschweig,1987.
2. H.W.England, M. Hanken and .Neubauer Regularization of Inverse Problems,
2000.
3. S.F. Gilyazov and N.L. Gol’dman, Regularization of Ill-Possed Problems by
Iteration MethodsTikhonov. 2000.
4. A. Kirsch. An Introduction to the Mathematical Theory of Inverse Problems. 1996.
5. A.N.Tikhonov and V.Y.Arsenin, Solutions of Ill-posed Problems, Winston and
Sons,Washington,1977.
10