Dinámica de la rotación del cuerpo rígido respecto a eje
Anuncio

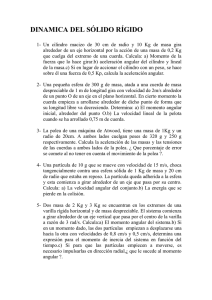
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN FACULTAD DE CIENCIAS-ESCUELA DE FÍSICA FÍSICA MECÁNICA MÓDULO # 22: SISTEMA DE PARTÍCULAS –DINÁMICA DEL CUERPO RÍGIDO (I)Diego Luis Aristizábal R., Roberto Restrepo A., Tatiana Muñoz H. Profesores, Escuela de Física de la Universidad Nacional de Colombia Sede Medellín 1 Temas Introducción Algunos aspectos de la cinemática del movimiento plano de un cuerpo rígido Dinámica de la rotación del cuerpo rígido respecto a eje fijo Ejemplos Introducción Las relaciones fundamentales de la cantidad de movimiento lineal, la cantidad de movimiento angular y la energía cinética (teorema TE) para un sistema de partículas, son aplicables al movimiento de un cuerpo rígido, que es un sistema de partículas con la condición especial de que las distancias entre ellas permanecen constantes. En el módulo # 21 se mostró que para el caso del teorema TE, el trabajo interno en un cuerpo rígido es cero. Así, las relaciones fundamentales para el estudio del movimiento de un cuerpo rígido son, F= dP = Ma CM dt τ= dL dt W = ΔK donde F , τ y W son la fuerza, el torque, el trabajo, externos, totales. Esas relaciones son válidas respecto a un marco inercial de referencia, con la cantidad de movimiento angular y el torque calculados respecto al mismo punto fijo en dicho marco. La relación de la cantidad de movimiento angular es también válida respecto al marco de referencia del centro de masa (que no necesariamente debe ser inercial), con el torque y la cantidad de movimiento angular evaluados respecto a dicho centro de masa. En este curso se trataran dos casos especiales de dinámica del cuerpo rígido: Dinámica de la rotación del cuerpo rígido respecto a un eje fijo. Dinámica del movimiento plano de un cuerpo rígido respecto a un marco de referencia inercial. En éste módulo se hará primero un breve análisis de algunos aspectos sobre la cinemática del movimiento plano de cuerpo rígido, entre esto se estudiará la condición de rodamiento sin deslizamiento. Luego se tratará la dinámica de rotación del cuerpo rígido respecto a un eje fijo. En el módulo # 23 se tratará la dinámica del movimiento plano de un cuerpo rígido respecto a un marco de referencia inercial. Algunos aspectos de la cinemática del movimiento plano de un cuerpo rígido Traslación del cuerpo rígido 2 Se dice que un cuerpo rígido se encuentra animado de un movimiento de traslación cuando todo segmento rectilíneo definido por dos puntos de aquél permanece paralelo a si mismo en el transcurso del movimiento, Figura 1: Todos los puntos de un cuerpo rígido animado de un movimiento de traslación tienen, en cada instante, la misma velocidad. Esa velocidad, común a todos los puntos del cuerpo, recibe el nombre de velocidad de traslación del sólido y debe ser considerada como un vector libre. Las mismas consideraciones pueden aplicarse a la aceleración. En consecuencia, una vez definido el movimiento de un punto cualquiera del cuerpo rígido que se traslada, se tiene definido el movimiento del cuerpo. Figura 1 Rotación del cuerpo rígido Se dice que un cuerpo rígido está animado de un movimiento de rotación alrededor de un eje fijo cuando todos sus puntos describen trayectorias circulares centradas sobre dicho eje y contenidas en planos normales a éste, Figura 2. 3 Figura 2 El eje de rotación puede atravesar el cuerpo o ser exterior al mismo; en el primer caso, los puntos del sólido que están sobre el eje permanecen en reposo en tanto que los demás puntos describen circunferencias en torno al eje; en el segundo caso, todos los puntos del sólido están en movimiento circular alrededor del eje exterior al sólido. En cualquier caso, la rapidez V de un punto P del sólido será tangente a la circunferencia descrita y, en un instante dado, tendrá un módulo tanto mayor cuanto mayor sea la distancia del punto al eje de rotación, V=ωr En donde ω corresponde a la rapidez angular de rotación y r es la distancia del punto P al eje de rotación. En un instante dado, todos los puntos del cuerpo poseen la misma rapidez angular, en tanto que a cada uno de ellos le corresponde una rapidez que es función de su distancia al eje de rotación. Así pues, la celeridad angular caracteriza al movimiento de rotación del cuerpo rígido en torno a un eje fijo. Movimiento plano Un cuerpo rígido tiene un movimiento plano cuando todos sus puntos se mueven en planos paralelos a un plano fijo. Se denominará plano del movimiento al plano que contiene el centro de masa. El corte de ese plano con el cuerpo rígido es la sección representativa. En el movimiento plano del cuerpo rígido, la aceleración angular, al igual que la velocidad angular, tiene la dirección del eje de rotación y ambos son vectores perpendiculares al plano en el que se produce el movimiento. Un disco delgado que se mueve, manteniéndose en un plano vertical fijo, rodando sobre una superficie horizontal, es un ejemplo de un cuerpo rígido en movimiento plano. Es esencial, para que el movimiento sea plano, que el eje geométrico del disco, mantenga siempre la misma dirección, es decir se desplace paralelamente a sí mismo. Si el disco “voltea”, si el eje gira en el plano horizontal, el movimiento cesa de ser un movimiento plano y se está en el caso de un movimiento espacial, tridimensional, aunque el cuerpo rígido sea un cuerpo plano. Un cuerpo volumétrico, tridimensional, puede describir movimientos planos. Por ejemplo un cilindro que rueda sobre una superficie horizontal de modo que su eje geométrico mantiene una dirección fija, describe un movimiento plano. Otro ejemplo de movimiento plano de un cuerpo rígido es una esfera rodando, siempre que el eje de rotación mantenga su dirección constante. Tanto en el caso del cilindro como el de la esfera, su sección representativa coincide con la del disco, Figura 3. En este curso se estudiará sólo movimientos planos de cuerpos que son simétricos respecto a su plano o sección representativa por el centro de masa, como en los ejemplos anteriores. 4 Figura 3 Velocidad de un punto P de un cuerpo rígido en movimiento plano Supóngase un pequeño desplazamiento entre los instantes t y t + Δ t. Dicho desplazamiento puede verse como una traslación del centro de masa más una rotación respecto a un eje por dicho centro de masa. Considérese como marco de referencia el plano en el que se efectúa el movimiento. En la dinámica ese plano será un marco inercial de referencia. Sea también el marco de referencia del centro de masa, marco que se traslada con la velocidad del centro de masa, VCM . Sea marco CM, VP / CM la velocidad relativa del punto P respecto al VP la velocidad de P y VCM la del CM ambas respecto al marco inercial O, Figura 4 . Figura 4 Entonces, VP / CM = VP / O - VCM / O VP = VCM VP / CM Ahora, el movimiento de P respecto al marco CM es un movimiento de rotación. Si w es el vector velocidad angular, perpendicular al plano, y R el radio de la trayectoria circular respecto al CM del punto P, VP / CM = ωR Nota: Por convención se tomará al eje Z en la dirección de la velocidad angular. Si w > 0, el vector velocidad angular apunta en la dirección positiva del eje Z. Es muy importante fijar explícitamente la dirección de Z, pues según esa dirección se determinan los signos de la velocidad angular, la aceleración angular, el torque y la cantidad de movimiento angular. Incluso, la elección de la dirección Z debe preceder a la elección de los ejes X y Y, que no son cruciales para las rotaciones en el plano XY, y que se determinan luego, en caso de que se requieran, de modo que el triedro sea derecho. Condición de rodamiento sin deslizamiento Como ejemplo se analizará un cuerpo que rueda SIN DESLIZAR sobre una superficie horizontal, Figura 5. Como cuerpo rodante considérese un sólido de revolución respecto a su eje geométrico por CM. Podría ser un cuerpo volumétrico, tridimensional, como una esfera o un cilindro, huecos o macizos, o un cuerpo plano como un disco o un anillo. Su sección representativa será, en todo caso, así Figura 5 Pero, VA = VCM VA / CM VA = V - ωR ˆi Si hay rodamiento puro, es decir el cuerpo rueda sin desliar, el punto A estará en reposo respecto al marco inercial O (el piso), VA = 0 , y por lo tanto, V = ωR ˆi Esto lleva a concluir que las velocidades del centro de masa y del punto B respecto al marco inercial O son, 5 VCM = ωR ˆi VB = 2 ωR ˆi Adicionalmente las aceleraciones del centro de masa y del punto B respecto al marco inercial O son, aCM = αR ˆi 6 a B = 2αR ˆi En esta situación al punto A se le denomina centro instantáneo de rotación. Se deja al lector calcular la rapidez en el punto C respecto a O, si su radio correspondiente forma un ángulo de 45o con la horizontal. Dinámica de la rotación del cuerpo rígido respecto a eje fijo Cantidad de movimiento angular En este curso sólo se analizarán situaciones en las que el movimiento del cuerpo rígido es plano y si rota, lo hace alrededor de un eje de simetría. En estos casos, si el eje fijo de rotación pasa por el punto O, la cantidad de movimiento angular del cuerpo respecto a O es, Lo = Io ω Siendo ω la velocidad angular de rotación la cual tiene la dirección del eje de rotación que por convención será el eje Z. Demostración: En la Figura 6 se ilustra un cuerpo con simetría respecto al eje de rotación, Figura 6 La componente Z de la cantidad de movimiento angular de la partícula i respecto a O es, Lioz = mi Ri Vi kˆ Lioz = mi Ri ω Ri kˆ Lioz = mi Ri2 ω kˆ 7 La cantidad de movimiento angular de todo el sistema de partículas respecto a O, es decir, el del cuerpo rígido, es, Lo = Lioz = m R ω kˆ 2 i ya que las componentes horizontales se anulan por simetría. Y como, Io = mi Ri2 Corresponde al momento de inercia del cuerpo rígido respecto al eje que pasa por O, entonces, Lo = Io ω kˆ [1] Esta expresión también se cumple si el cuerpo rígido es plano y el eje de rotación es ortogonal a éste, incluso si el eje no corresponde a un eje de simetría. Segunda ley de Newton de rotación El torque externo respecto a un punto O fijo a un marco de referencia inercial para un sistema de partícula cumple, τ= dL dt τ es el torque de las fuerza externas respecto a O y L es la cantidad de movimiento angular del sistema de partículas respecto al mismo punto O. En el caso de un cuerpo rígido que rota cumpliendo las condiciones para que se cumpla la ecuación [1], se tendrá, τ= d Iω dω = Io dt dt τ = Io α [2] en donde corresponde a la aceleración angular: esta es la análoga a la segunda ley de Newton para traslación, el momento de inercia I o hace en la rotación el papel que hace la masa en la traslación. Si la velocidad angular es constante, τ = 0 , y un cuerpo rígido puede mantener su rotación con velocidad angular constante respecto a un eje que pasa por O (que cumpla la ecuación [2]), sin ningún torque externo, lo cual es para la rotación, la análoga a la primera ley de Newton (ley de inercia) para la traslación. Conservación de la cantidad de movimiento angular Si el torque de las fuerzas externas respecto al punto O por donde pasa el eje de rotación es nulo, la cantidad de movimiento angular se conserva. Esto se puede concluir al hacer τ = 0 en la ecuación [5], dL o =0 dt Lo = constante Y por lo tanto, Ioω = constante O equivalentemente, Io1ω1 =Io2ω2 Ejemplos de situaciones donde se aplica esta ley de conservación: Estudiante montado en una plataforma giratoria de baja fricción en sus rodamientos, Figura 7: El peso P (plataforma + estudiante) y la fuerza normal N que ejerce el rodamiento sobre la plataforma son las fuerzas externas que actúan sobre el sistema (plataforma + estudiante) y no hacen torque respecto a O (que es el CM del sistema), por lo tanto se conserva Lo . Es decir, si el estudiante abre sus brazos aumenta su momento de inercia y por lo tanto debe disminuir su velocidad angular y viceversa. Figura 7 8 Un clavadista en natación, Figura 8: El peso no realiza torque respecto al CM de la clavadista, por lo tanto se conserva L respecto a su centro de masa. Es decir, si la clavadista se encoge disminuye su momento de inercia y por lo tanto debe aumentar su velocidad angular y viceversa. 9 Figura 8: Foto obtenida del link mx.ibtimes.mx La bailarina de la Figura 9: El peso P y la fuerza normal N son las fuerzas externas que actúan sobre lal bailarina y no hacen torque respecto al CM, por lo tanto se conserva L respecto a su centro de masa. Es decir, si la bailarina abre sus brazos aumenta su momento de inercia y por lo tanto debe disminuir su velocidad angular y viceversa. Figura 9: Foto obtenida del link www.havanatimes.org En el siguiente link se hace un buen análisis sobre la habilidad de los gatos para rotar su cuerpo y tratar siempre de caer de pie, http://www.vega00.com/2012/05/explicacion-fisica-de-por-que-los-gatos.html Energía cinética y teorema TE La energía cinética del cuerpo rígido que rota respecto al eje fijo z que pasa por O, con velocidad angular es la suma de las energías cinéticas de las diversas partículas, K= 1 2mV 2 i i 10 y como Vi = ωRi K= 2 m R ω 1 i 2 i 2 1 K = I o ω2 2 [3] El teorema del trabajo y la (teorema TE) energía entre situaciones a y b es entonces, Wa b = K Wa b = 1 1 Io ωb2 - Io ωa2 2 2 [4] En donde Wa→b corresponde al trabajo total de las fuerzas externas. Si hay fuerzas conservativas, su trabajo puede evaluarse en términos de las energías potenciales asociadas. El trabajo de rotación realizado por el torque para rotar el cuerpo rígido desde θb Wa b = τ dθ [5a] θa Si el torque es constante, Wab = τ θb - θa [5b] La potencia desarrollada en la rotación es, P = τω [6] a hasta b es igual a, Analogía entre el movimiento rectilíneo y el movimiento de rotación de un cuerpo rígido respecto a un eje fijo En la tabla 1 se presenta la analogía entre el movimiento rectilíneo y la rotación de un cuerpo rígido respecto a un eje fijo. Tabla 1: Analogía entre el movimiento rectilíneo y la rotación de un cuerpo rígido respecto a un eje fijo MOVIMIENTO RECTILÍNEO Posición Velocidad Aceleración Masa Fuerza Segunda ley de Newton Cantidad de movimiento lineal Energía cinética Trabajo Teorema TE Potencia x dx dt dV d 2 x a= = dt dt 2 m F F = ma V= P = mV 1 mV 2 2 W = F dx K= W = ΔK P = FV ROTACIÓN DE CUERPO RÍGIDO RESPECTO A UN EJE FIJO θ Posición angular ω= Velocidad angular Aceleración angular Momento de inercia α= dθ dt dω d 2θ = 2 dt dt Io τ Torque Segunda ley de Newton τ = Io α Cantidad de movimiento angular Lo = I o ω Energía cinética Trabajo Teorema TE Potencia 1 Io ω2 2 W = τ dθ K= W = ΔK P=τω Ejemplos Ejemplo 1 Se sujeta una masa m a una cuerda ligera enrollada alrededor de una rueda homogénea de masa M y radio R, Figura 10. Hallar la tensión en la cuerda y la aceleración de descenso de la masa m (despreciar la fricción en el eje de la polea). Figura 10 11 Solución: En la Figura 10 se ilustra la situación física, el sistema de coordenadas elegido, el diagrama de fuerzas del bloque y de la polea (con pedazo de cuerda). En este último no se tomó en cuenta la fuerza horizontal Rx que ejerce el eje de la polea, ya que por la situación física que se presenta es nula. El marco de referencia inercial se considera un marco localmente ligado a la Tierra, en el cual está fijo al eje de rotación de la polea. El bloque se considera una partícula y la polea un cuerpo rígido rotando respecto a eje fijo. 12 Aplicando la segunda ley de Newton al bloque se obtiene, Fy = ma mg - T = ma (1) Aplicando la segunda ley de Newton de rotación a la polea se obtiene, o = Io T R = Io α TR= 1 MR 2 α 2 (2) De la cinemática, la aceleración de descenso del bloque es igual a la aceleración tangencial de un punto del borde de la polea (la cuerda no desliza), y por lo tanto, a = a T = αR (3) De las ecuaciones (1), (2) y (3) se obtiene, a= T= mg 1 m+ M 2 Mmg 2m+M Observar que si M=0 la aceleración es a=g y T=0, es decir, la masa m descenderá en caída libre. Ejemplo 2 En el sistema de la Figura 1 calcular la aceleración de descenso del bloque de masa m 2 y las tensiones en los extremos de la cuerda. La polea tiene radio R y masa M. Despreciar la fricción con el plano y la fricción en el eje de la polea. 13 Figura 11 Solución: En la Figura 11 se ilustra la situación física, el sistema de coordenadas elegido, el diagrama de fuerzas de los bloques de masas m1, m2 y de la polea (con pedazo de cuerda) de masa M. El marco de referencia inercial se considera un marco localmente ligado a la Tierra, en el cual está fijo al eje de rotación de la polea. Los bloques se consideran partículas y la polea un cuerpo rígido rotando respecto a eje fijo. Aplicando la segunda ley de Newton al bloque de masa m 1 se obtiene, Fx = m1a1 - T1 = m1a1 (1) Aplicando la segunda ley de Newton al bloque de masa m2 se obtiene, Fy = m2a 2 m2g - T2 = m2a 2 (2) Aplicando la segunda ley de Newton de rotación a la polea se obtiene, o = Io T1 R - T2R = Ioα T1 R - T2R= MR 2 α (3) Se supuso que prácticamente la masa M de la polea estaba en el borde. De la cinemática se tiene que, x + y = constante a1 + a 2 = 0 a1 = - a 2 Es decir si (4) a 2 = a entonces a1 = -a Adicionalmente la aceleración tangencial de un punto del borde de la polea es, a T = -α R El signo menos se debe a la dirección que se tomó como positiva para eje z. Pero la aceleración tangencial de un punto del borde de la polea es igual a la aceleración de descenso de la masa m2 (la cuerda no resbala), a 2 = a = -αR (5) De las ecuaciones (1), (2), (3), (4) y (5) se obtiene, a= m2g m1 +m 2 +M m1m2g m1 +m2 +M T1 = T2 = m1 + M m2g m1 +m2 +M Observar que si se desprecia la masa M de la polea, M=0, se obtendrá, a= m2g m1 +m 2 T1 = T2 m1m 2g m1 +m 2 Ejemplo 3 La máquina de Atwood, Figura 12. La polea tiene masa M y radio R. Calcular las aceleraciones de las masas m1 y m2 y las tensiones en los extremos de la cuerda. Desprecia la fricción en el eje de la polea. 14 15 Figura 12 Solución: En la Figura 12 se ilustra la situación física, el sistema de coordenadas elegido, el diagrama de fuerzas de los bloques y de la polea (con pedazo de cuerda). En este último no se tomó en cuenta la fuerza horizontal Rx que ejerce el eje de la polea, ya que por la situación física que se presenta es nula. El marco de referencia inercial se considera un marco localmente ligado a la Tierra, en el cual está fijo al eje de rotación de la polea. Los bloques se consideran partículas y la polea un cuerpo rígido rotando respecto a eje fijo. Aplicando la segunda ley de Newton al bloque de masa m1 se obtiene, Fy = m1a1 m1g - T1 = m1a1 (1) Aplicando la segunda ley de Newton al bloque de masa m2 se obtiene, Fy = m2a 2 m2g - T2 = m2a 2 (2) Aplicando la segunda ley de Newton de rotación a la polea se obtiene, o = Io -T1 R + T2 R = Ioα -T1 R + T2 R= 1 MR 2 α 2 De la cinemática se tiene, y1 + y2 = constante (3) a1 + a 2 = 0 a1 = - a 2 Es decir si (4) a 2 = a entonces a1 = -a Adicionalmente la aceleración tangencial de un punto del borde de la polea es, aT = α R Pero la aceleración tangencial de un punto del borde de la polea es igual a la aceleración de descenso de la masa m2 (la cuerda no resbala), a 2 = a = αR (5) De las ecuaciones (1), (2), (3), (4) y (5) se obtiene, m2 - m1 a= g 1 m1 +m2 + M 2 T1 = m1 g + a T2 = m1 g - a Si la masa de la polea se desprecia, M=0, m - m1 a= 2 g m1 +m 2 2 m 2 m1 T1 = T2 = g m1 +m 2 Si adicionalmente, si m1=0, a= + g y T1=T2=0, o si m2=0, a=-g y T1=T2=0. 16 Taller 1. Una polea de masa 5 kg y radio 0,2 m tiene enrollada a su alrededor una cuerda de masa despreciable, Figura 13. Al extremo libre de la cuerda se sujeta un cuerpo de 10 kg de masa, y soltándolo del reposo cae 3 m en 6 s. Calcular el torque producido por el rozamiento en el eje, asumiendo que es constante. Rp. 19,2 N.m 17 Ayuda: Plantear la ley de Newton de rotación para la polea y de traslación para la masa m. Figura 13 2. Dadas las masa de los cuerpos m1 , m2 y el coeficiente de rozamiento μ entre m1 y la superficie horizontal, así como la masa de la polea M y su radio R que puede considerarse como un disco homogéneo, Figura 14, demostrar que, (a) la aceleración de las masas m1 y m2 es: m2 m1 a g m1 m2 1 M 2 (b) Los valores de las fuerzas que ejerce la cuerda sobre las masas m1 y m2 son respectivamente, 1 m2 1 2 M T1 m1 g 1 m1 m2 M 2 1 m1 1 2 M T2 m2 g m1 m2 1 M 2 Analizar estos resultados cuando adicionalmente se desprecia la masa de la polea. Ayuda: Plantear la ley de Newton de rotación para la polea y de traslación para las masas m1 y m2 . 18 Figura 14 3. Una varilla uniforme de longitud L y masa m puede girar en un plano vertical alrededor de un eje horizontal que pasa por uno de sus extremos, Figura 15. Si la barra se deja caer desde una posición vertical, determinar su velocidad y aceleración angular cunado la barra forma un ángulo vertical. Rp. 3g 1 cos ; 3 g sen 2L L Ayuda: Aplicar la conservación de la energía mecánica para el cuerpo rígido. Figura 15 FIN. con la