fundamentos físicos de la ingenieria primera sesión de prácticas
Anuncio

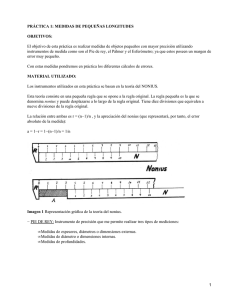
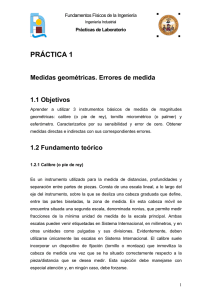
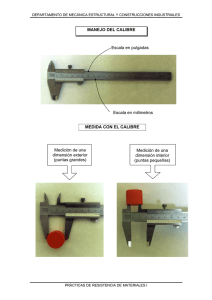
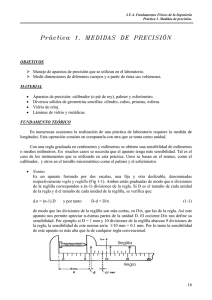
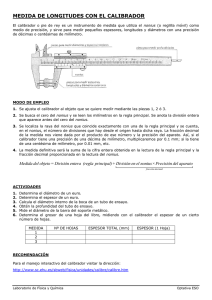
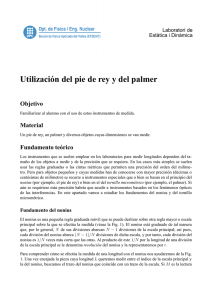
DEPARTAMENTO DE FÍSICA APLICADA ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AGRÓNOMOS Y DE MONTES UNIVERSIDAD DE CÓRDOBA FUNDAMENTOS FÍSICOS DE LA INGENIERIA PRIMERA SESIÓN DE PRÁCTICAS 1. Introducción al cálculo de errores. 2. Medidas de precisión FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas 1.- Introducción al cálculo de errores Objeto: Aprender a determinar los errores inherentes a la medida de las magnitudes físicas. Fundamento: Cuando se realiza la medida de una determinada magnitud rara vez podemos afirmar con certeza que el valor obtenido es el valor real y probablemente, al repetir la medida los valores obtenidos sean diferentes. La realización de la medida lleva inherente una incertidumbre, la posibilidad de cometer un error, que puede deberse a imperfecciones del aparato de medida o a las limitaciones de nuestros sentidos, que deben registrar la información. Dicha incertidumbre suele disminuir cuando se hacen medidas repetidas de dicha magnitud. Hay que considerar también que, en determinadas ocasiones, el método de medida perturba el sistema de algún modo, por ejemplo cuando introducimos un molinete en una corriente fluida para medir la velocidad. De esta forma es conveniente acompañar a la medida realizada en el laboratorio del error estimado en dicha medida. Errores. El error se define como la diferencia entre el valor verdadero y el obtenido experimentalmente. Atendiendo a las causas que los producen se clasifican en: - Determinados o sistemáticos. Afecta a todas las mediciones y es el mismo para todas ellas. Puede deberse al aparato (e.g. error del cero), al operario, o al método elegido. Si somos capaces de medir este error podremos corregir su efecto. - Indeterminados o accidentales. Son pequeñas variaciones, tanto por exceso como por defecto, que se observan entre distintas medidas del mismo experimento. Para minimizar estos errores deben hacerse medidas repetidas y utilizar métodos estadísticos que nos acerquen al valor probablemente real. Junto a la medida debe indicarse las bandas de error que indica los límites entre los que puede oscilar la medida de la magnitud que se ha realizado. Podemos hablar de: a) Error absoluto, como la diferencia entre una medida obtenida experimentalmente y el valor verdadero. Naturalmente se expresa en las mismas unidades que la medida realizada. b) Error relativo. Se obtiene dividiendo el error absoluto por el valor verdadero. Suele expresarse en tantos por ciento o tanto por uno. 1.1 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Medidas directas Son aquellas cuyo resultado se obtiene directamente en el curso de un experimento sin necesidad de realizar cálculo alguno. Por ejemplo, la temperatura medida con un termómetro o el tiempo contabilizado con un cronómetro. Las medidas directas pueden dividirse en dos grupos: a) Medida directa única. Cuando la sensibilidad del aparato es pequeña comparada con la magnitud de los errores aleatorios o accidentales, la repetición de la medida nos lleva siempre al mismo resultado. En este caso es suficiente hacer una sola medida, se admite ésta como valor verdadero y como error absoluto la sensibilidad del aparato utilizado, es decir, el intervalo mínimo que puede apreciarse con dicho aparato. Cuando se utilizan aparatos analógicos (la medida se da en forma continua, por ejemplo una aguja que se desplaza sobre una escala) se considera como valor de la medida la división de la escala que esté más próxima a la aguja y los límites de la banda de error serán ± la mitad de la precisión. Si se utilizan aparatos digitales (la medida aparece en una pantalla y la respuesta es discontinua, a intervalos discretos) el error dependerá del sistema interno de presentación de datos (redondeo o truncamiento), por lo que en caso de desconocerse este sistema se tomará como límites de la banda de error ± la precisión entera, no su mitad. b) Medida directa repetida. Repitiendo la medida se intentan minimizar los errores accidentales. Se toma como valor verdadero el valor medio de las medidas (1.1) n x= ∑x i =1 i (1.1) n Como error en la medida se considera la desviación típica de la muestra (1.2), que nos indica el error cuadrático medio al considerar x como valor de la medida. n σ n −1 = ± ∑(x − x ) i =1 2 i (1.2) n −1 Medidas indirectas. Se obtienen a partir de una expresión matemática en la cual aparecen magnitudes medibles directamente. Por ejemplo, supongamos la magnitud física u que se calcula en función de las magnitudes x, y, z,...: u = u ( x, y, x,...) (1.3) las medidas directas y sus incertidumbres se habrán determinado como se ha indicado anteriormente, dependiendo de que la medida sea única o repetida. Supongamos pues que los valores medidos son: x ± Δx, y ± Δy , 1.2 z ± Δz ,... FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas y queremos determinar el valor de u y la incertidumbre u ± Δu . El valor de u lo determinamos sustituyendo los valores medidos en la expresión (1.3). El valor de la incertidumbre lo calculamos teniendo en cuenta que el cambio que ∂u . Si x cambia experimenta el valor de u cuando el valor de x cambia una unidad es ∂x Δx , u cambiará Δu x = ∂u Δx ∂x y lo mismo podemos decir para las magnitudes y, z,... Por lo que: Δu = ∂u ∂u ∂u Δx + Δy + Δz + ... ∂x ∂y ∂z Podemos decir que las diferenciales de las variables coinciden con los errores absolutos de las magnitudes, y las variables con los valores supuestos exactos. Así el error relativo será el valor de la diferencial dividida por la variable (valor exacto). De esta forma si se toman logaritmos neperianos en la expresión matemática y se diferencia, haciendo positivos todos los términos de la diferencial, obtenemos directamente el error en la medida indirecta en función de los errores en las magnitudes medidos directamente. Ejemplo: el volumen de un cilindro viene dado por la expresión, V = π r 2h (1.4) siendo r la medida del radio y h la altura. Si dr y dh representan los errores de estas dos magnitudes, el error de V lo podemos determinar tomando logaritmos neperianos en la expresión: ln V = ln π + 2 ln r + ln h (1.5) dV dr dh =2 + V r h (1.6) diferenciamos la expresión: El error absoluto vendrá dado por: ⎛ dr dh⎞ d V = ±V ⎜ 2 + ⎟ h ⎠ ⎝ r (1.7) dV ⎛ dr dh⎞ = ±⎜2 + ⎟ V h ⎠ ⎝ r (1.8) El error relativo será: Cifras significativas. Las cifras significativas, como su nombre indica, son las que nos dan información detallada sobre el valor de la cantidad. En el número de cifras significativas no se tienen 1.3 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas en cuenta los ceros situados a la izquierda de la primera cifra no nula. Así 3.25 kg, 271 N y 0.0168 m tienen todas tres cifras significativas. El número de cifras que deben figurar en un resultado viene condicionado por el error o desviación cometido en su determinación. La última cifra significativa en el valor de una magnitud y en su error, expresados en las mismas unidades, deben corresponder al mismo orden de magnitud. Es correcto: 24.54 ± 0.03 No es correcto: 24.5362 ± 0.03 Cálculos con cantidades aproximadas Cuando se realizan cálculos con medidas realizadas previamente, no todas las cifras del resultado tienen porqué ser significativas. Para evitar calcular cifras innecesarias pueden tenerse en cuenta las siguientes recomendaciones: 1) En la suma y resta se conservan tantas cifras decimales en el resultado como el sumando que menos tenga. 2) En el producto y la división se conservan tantas cifras decimales como el factor que menos tenga. 3) Al elevar a un exponente (entero o fraccionario) se conservan tantas cifras decimales como tenga la base. 4) Cuando haya que realizar operaciones consecutivas es conveniente dejar una cifra más de la que establece la regla correspondiente en los resultados intermedios (cifra de seguridad) eliminándola por redondeo cuando se llegue al resultado final. Cuestiones: 1.- Se realizan diez medidas consecutivas del tiempo que tarda un móvil en recorrer un espacio de 5 m, obteniéndose los siguientes resultados expresado en segundos: 10.2; 10.3; 10.1; 10.2; 10.5; 10.3; 10.4; 10.1; 10.3; 10.1 Determinar el valor promedio de estas diez medidas y la desviación típica de la muestra (error estimado al considerar la media como valor de la medida del tiempo). 2 - Determinar el error cometido al calcular el volumen de un cilindro del cual se han medido el radio: 5.82 cm y la altura: 20.35 cm con una cinta métrica que aproxima hasta décimas de mm. 3- Para aforar el caudal suministrado por una fuente se utiliza un recipiente de base cuadrada de lado a y altura h. Cinco observadores miden las dimensiones del recipiente y el tiempo t que tarda en llenarse completamente. Determinar el caudal medio medido y el error estimado en la medida de dicho caudal. (Q=V/t) 1.4 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Observador a (cm) h (cm) t (s) 1 22.4 47.2 356.2 2 22.6 46.9 359.1 3 22.1 47.1 359.6 4 22.5 47.3 360.3 5 22.3 47.1 357.8 media error Q±ΔQ 1.5 Guión de prácticas FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas 2.- Medidas de precisión Objeto: Aprender a manejar los aparatos de precisión que se utilizan en el laboratorio para la medida de longitudes. Material: Calibrador. Palmer. Esferómetro. Diversos sólidos de geometría sencilla. Fundamento: La operación de medir consiste en comparar la cantidad de magnitud física que queremos medir con la unidad de esa magnitud. Este resultado se expresará mediante un número seguido del error estimado y de la unidad utilizada. La medida de una magnitud física en muchas ocasiones implica la medida de una longitud. Con una regla graduada en centímetros y milímetros podemos conseguir una precisión de milímetros o, incluso, del medio milímetro. Pero en muchas ocasiones es necesario que nuestra medida sea mucho más precisa: entonces recurrimos a instrumentos especiales, unas veces fundados en el nonius, tales como el calibrador, el catetómetro,... otras en el tornillo micrométrico, tales como el palmer, el esferómetro,... y otros, mucho más sofisticados y precisos, que utilizan métodos ópticosinterferenciales. Nonius.- El nonius o vernier es un ingenioso dispositivo que aumenta en un orden de magnitud la sensibilidad de una escala. Consiste en una pequeña escala que se opone a la escala original. La escala pequeña es la que se denomina nonius y puede desplazarse a lo largo de la escala original. En general tiene divisiones que equivalen a n-1 divisiones de la escala original. Si el espaciado en la escala original es x0 y en el nonius es xn, tendremos: n xn = ( n − 1) x0 (2.1) Siendo la precisión del aparato p= x0 n (2.2) Generalmente n = 10. En un aparato de medida con nonius éste se desplaza hasta que la posición del cero del nonius sobre la escala original indica el valor que se quiere medir. En el ejemplo de la Figura 1.1 el cero del nonius está entre 41 y 42. La escala del nonius permite conocer esta posición con una cifra significativa más. Esta cifra viene dada por la división del nonius que coincide con una cualquiera de la escala original. En la figura, la división del nonius que coincide con alguna de la escala original es la 6, que coincide con la 47. El valor de la medida es 41,6. La razón es la siguiente: si llamamos 2.1 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Δx a la distancia entre la división 41 de la escala original y la división 0 del nonius, tendremos: Δx + mxn = mx0 10 50 (2.3) siendo m la división que coincide (m = 6, en nuestro ejemplo). Aplicando la ecuación ⎛x ⎞ (2.1), se llega a que Δx = m ⎜ 0 ⎟ . Luego m ⎝ 10 ⎠ nos indica cuánto vale Δx en n-avas partes de x0. Escala original x0 40 Podemos resumir el procedimiento de medida en los dos pasos siguientes: 5 45 nonius xn Δx 0 Fig. 2.1. Esquema del funcionamiento del nonius. 1. La división de la escala original que está debajo del cero del nonius nos da la parte entera de la medida. 2. La primera división del nonius que coincide con una de la escala original nos da las décimas, (siendo n = 10). Ejemplo de la figura: Parte entera: 41. División coincidente: la 6. Resultado de la medida: 41.6. Para la medida de ángulos se utilizan nonius circulares con los que se opera de modo análogo que con los nonius lineales. Tornillo micrométrico.- Consta en esencia de un tornillo de paso de rosca, h, rigurosamente constante, que avanza en una tuerca apropiada, y cuya cabeza va unida a un tambor circular graduado. Una escala lineal, fija en la tuerca por la que avanza el tornillo, permite apreciar el número entero de vueltas, mientras que las fracciones de ella se leen en la escala del tambor. Si éste se encuentra dividido en n partes, cada una de ellas indicará n-avas partes del paso de rosca. La precisión del tornillo será: p= h n (2.4) Así, si el paso de rosca es h = 0.5 mm y el tambor está dividido en n = 50 partes iguales, cada una de sus divisiones representa una 50-ava parte de vuelta, lo que representa un avance (o retroceso) del tornillo de p= h 0.5 mm mm = = 0.01 div n 50 div 2.2 (2.5) FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Calibrador.- El calibrador o pie de rey es un aparato para la medida de precisión de longitudes que lleva incorporado un nonius. Generalmente se construye en acero y tiene la forma que se indica en la Figura 2.2. Por su construcción permite medir: (1) espesores de piezas, (2) dimensiones internas de cavidades y (3) profundidades de cavidades. (2) (3) (1) Figura 2.2. Calibrador o pie de rey. Palmer.- El palmer es un tornillo micrométrico que tiene la forma que se ilustra en la Figura 2.3., de modo que el tronillo avanza por una tuerca fija (B) que constituye el extremo de una abrazadera (A). El avance del tornillo se consigue haciendo girar su cabeza (C), que tiene la forma de un cilindro hueco, graduado, por cuyo C B O E interior discurre una varilla cilíndrica solidaria de la tuerca, con una escala a lo D largo de la generatriz (E), graduada de modo que cada división corresponde al A paso de rosca del tornillo. Figura 2.3.- Palmer El tornillo dispone de un tambor o limbo graduado (D) que permite apreciar las fracciones de vuelta. Para medir el espesor de un objeto (v.g,. una lámina) se coloca éste entre el tope (O) y la punta del tornillo y hacemos avanzar el tornillo, girando lentamente su cabeza (C), hasta que presione suavemente sobre el objeto. A fin de que no se pueda forzar al tornillo, la mayoría de estos aparatos tienen una cabeza (C) acoplada al tornillo mediante fricción suave; de este modo se consigue, además, ejercer la misma presión en todas las lecturas. Esferómetro.- Al igual que el palmer el esferómetro se basa en el principio del tornillo micrométrico, y está destinado a la medida de espesores y, especialmente, a la determinación de radios de superficies esféricas, de donde recibe su nombre. El aparato consta de un soporte provisto de tres pies, cuyas puntas forman un triángulo equilátero, por entre las cuales discurre el tornillo T que termina en una punta fina P. El paso de rosca del tornillo suele ser de 0.5 mm, y el número de vueltas se puede leer en la regla L T P Fig. 2.4. Esferómetro 2.3 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas graduada vertical. Las fracciones de vuelta se leen sobre el limbo graduado L, solidariamente unido a la cabeza del tornillo. Para medir el espesor de un objeto se coloca primeramente el esferómetro sobre una superficie plana de referencia, se levanta la punta del tornillo colocando el objeto debajo, y se vuelve a bajar aquella hasta que toque justamente el objeto. D D C E C A f l B O r E l r A A l 2R-f B F F Fig. 2.5. Medida del radio de una esfera con el esferómetro Para medir el radio de una esfera se apoyan las patas del esferómetro sobre una superficie esférica, se hace que el extremo del tornillo toque justamente su cúspide. Las patas se habrán apoyado en los puntos A, B y C de la esfera (figura 2.5). El tornillo estará apoyado en el punto D. La medida efectuada corresponde a la distancia ED = f (flecha). Si se apoyan las tres patas del esferómetro sobre un papel, quedará determinado el triángulo equilátero ABC, cuyo lado l medimos como media aritmética de los tres lados. El radio de la circunferencia que pasa por los puntos A, B y C es: EA = r = l 3 (2.6) Considerando el triángulo rectángulo FAD y teniendo en cuenta el teorema de la altura, se obtiene: r 2 = f ( 2R − f ) = 2R f − f 2 (2.7) f 2 + r2 2f (2.8) 1 l2 R= f + 2 6f (2.9) R= Sustituyendo (2.6) en (2.8) se obtiene: quedando, de esta forma, medido el radio de la esfera. 2.4 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Método: (a) Calibrador (i) Observar o determinar la precisión del aparato y anotarla. (ii) Determinar el error del cero, si lo hubiese, efectuando la lectura varias veces si es necesario y calculando, en su caso, su valor medio y desviación típica. Anotar el resultado. Este error de cero debe restarse algebraicamente de cada lectura posterior realizada con el aparato. (iii) Hacer un croquis de las piezas problema (probeta y cilindro). Efectuar la medida de cada una de las dimensiones de las piezas hasta cinco veces si es necesario; anotar los resultados de las lecturas y calcular su valor medio. Anotar sobre el croquis de la pieza los resultados de la medida de sus dimensiones, con todas sus cifras exactas y su error estimado. (iv) Calcular el volumen del cilindro con todas sus cifras exactas y determinar el error estimado. (b) Palmer (i) Determinar la precisión del aparato y anotarla. (ii) Determinar el error del cero del aparato, si lo hubiese, repitiendo la lectura varias veces si es necesario y calculando el valor medio y desviación típica. Anotarlo. Al igual que para el calibrador este error de cero debe restarse algebraicamente de toda lectura posterior realizada con el aparato. (iii) Medir el espesor de la-s pieza-s problema (v.g,. una lámina). Repetir las lecturas varias veces si es necesario y, en su caso, calcular su valor medio y su desviación típica. (c) Esferómetro (i) Determinar u observar la precisión del aparato y anotarla. (ii) Determinar el error del cero del aparato, si lo hubiese, repitiendo la lectura varias veces y tomando el valor medio. Anotarlo. Al igual que para los anteriores este error de cero debe restarse algebraicamente de toda lectura posterior realizada con el aparato. (iii) Medir la distancia entre cada dos patas del aparato con el calibre y calcular la media y la desviación típica. Calcular el radio de la circunferencia determinada por aquellas. (iv) Medir la flecha (o altura del casquete esférico) de la lente. Repetir las lecturas varias veces y calcular su valor medio y desviación típica de la media. (v) Calcular el radio de curvatura de la lente y determinar el error estimado. 2.5 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Resultados: Calibrador: Medida de la mínima división de la regla X0 = número de divisiones en el nonius n= precisión del aparato: p= medidas 1 2 3 4 5 1 2 3 4 5 valor medio desviación típica error del cero Cilindro: medidas valor medio con desviación corrección típica de cero Croquis de la pieza: Volumen de la pieza: Error estimado: Esta página, debidamente sellada, debe entregarse grapada junto con el informe 2.6 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Probeta de acero: medidas 1 2 3 4 5 valor medio con desviación corrección típica de cero Croquis de la pieza: Palmer: Paso de rosca ´ h= número de divisiones en el nonius n= precisión del aparato: p= medidas 1 2 3 4 5 1 2 3 4 5 valor medio desviación típica error del cero medidas valor medio con desviación corrección típica de cero Esta página, debidamente sellada, debe entregarse grapada junto con el informe 2.7 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Esferómetro: Paso de rosca h= número de divisiones en el nonius n= precisión del aparato: p= medidas 1 2 3 4 5 valor medio desviación típica error del cero Distancia entre las patas del esferómetro: l1 = l2 = l ± Δl = l3 = Radio de la circunferencia determinada por las patas del aparato r±Δr= Medidas flecha 1 2 Radio de curvatura de la lente 3 4 5 valor medio con desviación corrección típica de cero R±ΔR= Esta página, debidamente sellada, debe entregarse grapada junto con el informe 2.8 FUNDAMENTOS FÍSICOS DE LA INGENIERÍA Guión de prácticas Cuestiones: (1) La escala de un calibrador está dividida en medios milímetros y su nonius tiene 20 divisiones. ¿Cuál será la precisión de este aparato? (2) Con el calibrador descrito en la pregunta anterior se mide una distancia de algo más de 12.5 mm, y la división número 13 de la reglilla de su nonius coincide exactamente con una división de la regla. ¿Cuál es el resultado de la medida? (3) Para medir ángulos se utiliza un limbo que está graduado en medios grados sexagesimales y lleva acoplado un nonius circular con 30 divisiones. ¿Cuál es la precisión de este instrumento? (4) Definir el paso de rosca de un tornillo. (5) Determinar la precisión de un palmer que tiene un paso de rosca de 0.25 mm y cuyo tambor lleva 50 divisiones. (6) Con el palmer de la pregunta anterior, hemos medido el espesor de una lámina. Lo hemos girado cinco vueltas completas y en el tambor leemos la división 35. ¿Cuál es el espesor de la lámina? (7) El paso de rosca de un esferómetro es de 0.5 mm, el limbo está dividido en 100 divisiones. ¿Cual es la precisión de este aparato? (8) La distancia entre los pies del esferómetro de la pregunta anterior es de 3.6 cm y con él se pretende medir el radio de curvatura de una lente. Al medir la flecha hemos dado siete vueltas completas al tornillo y en el limbo podemos leer la división 68. ¿Cuál es la flecha? ¿Cuál es el radio de curvatura de la lente? Respuestas: 2.9